
Abstract
The adapting of lateral deviation during the change of road curvature with less error, system settling time, and overshoot is the main challenge against the steering angle control of autonomous vehicles (AVs). In this regard, this paper introduces new learning techniques defined opposition-based learning (OBL) and quasi OBL (QOBL) to improve the exploration as well as exploitation manner of the grey wolf optimizer (GWO). The involved approach can enhance the searching behavior of the original GWO against the trapping in local optima. The proposed modified GWO (MGWO) is applied to detect the optimal factors of the adaptive model predictive control (AMPC) for AVs. The suggested MGWO-based AMPC is evaluated with the classical MPC and the adaptive fuzzy logic controller. Furthermore, the inspired MGWO is compared with the original GWO, neural network algorithm (NNA), heap-based optimizer, and equilibrium optimizer in literature. The performance of the introduced technique is tested to follow different road curvatures. Moreover, the presented method is approved against the time delay of the vision system and the produced uncertainty of system variables from the change of vehicle speed and look–ahead distance. Furthermore, the introduced MGWO-based AMPC can tackle the system settling time and overshoot to be less than 1 s and 1.696% respectively for the response of lateral deviation compared to other techniques. The attained results emphasize that the proposed MGWO-based AMPC controller has high damped and effective performance evaluated with other controllers.

















Similar content being viewed by others


Abbreviations
- AI:
-
Artificial intelligence
- AMPC:
-
Adaptive model predictive control
- AV:
-
Autonomous vehicle
- EO:
-
Equilibrium optimizer
- FL:
-
Fuzzy logic
- FOD:
-
Figure of demerit
- GWO:
-
Grey wolf optimizer
- HBO:
-
Heap-based optimizer
- KF:
-
Kalman filter
- LTI:
-
Linear time invariant
- MGWO:
-
Modified grey wolf optimizer
- MPC:
-
Model predictive control
- NL:
-
Negative large
- NM:
-
Negative medium
- NNA:
-
Neural network algorithm
- OBL:
-
Opposition-based learning
- PI:
-
Proportional–integral
- PID:
-
Proportional–integral–derivative
- PL:
-
Positive large
- PM:
-
Positive medium
- QOBL:
-
Quasi opposition-based learning
- ZE:
-
Zero
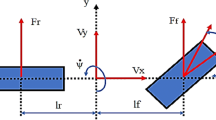
- v :
-
The velocity coordination (vx, vy)
- v x :
-
Longitudinal x-axis velocity
- v y :
-
Lateral y-axis velocity
- δ f :
-
Front wheel steering angle
- l f :
-
Front axle space
- l r :
-
Rear axle space
- \(\dot{\phi }\) :
-
The vehicle yaw rate
- c f , c r :
-
The front and rear tires stiffness
- m :
-
The weight of the vehicle mass
- I ψ :
-
The vehicle inertia across CoG
- y L :
-
Vehicle lateral deviation
- R L :
-
The road radius from the target position
- K L :
-
The disturbance in road curvature
- \(\varepsilon_{L}\) :
-
The angle within the orientation of vehicle and the tangent of road
- L :
-
Look-ahead distance
- Δu j :
-
The control moves and equal uj – uj–1
- Q, R :
-
Weighting factors
- r k + i :
-
The reference value
- k :
-
The sample index of time
- x :
-
System state variables
- u :
-
Control signal
- v :
-
The system measured outside effects
- d :
-
The system unmeasured outside effects
- y :
-
Predicted response
- \(\overline{x}\) :
-
The system normal state variables
- \(\Delta \overline{x}\) :
-
The change in states
- \(\overline{u}_{t}\) :
-
The normal control input
- \(\overline{y}\) :
-
Normal output
- T s :
-
Sample time
- P :
-
Prediction zone
- M :
-
Control zone
- K P :
-
Proportional gain
- K I :
-
Integral gain
- K si :
-
Scaling factor, i = 1,..,4
- \(X^{p} (t)\) :
-
Prey position
- \(X(t)\) :
-
Wolf position
- t :
-
Iteration number
- a :
-
Linear function decreased from 2 to 0
- r 1 , r 2 :
-
Random numbers in [0, 1]
- M P :
-
The response maximum overshoot
- E SS :
-
The response steady-state error
- t s :
-
The response settling time
- β :
-
Weighting factor
References
Abdullah AS, Hai LK, Osman NAA, Zainon MZ (2006) Vision based automatic steering control using a PID controller. J Teknol (a) 44(A):97–114
Abraham H, Lee C, Brady S, Fitzgerald C, Mehler B, Reimer B, Coughlin JF (2016) Autonomous vehicles, trust, and driving alternatives: a survey of consumer preferences. Massachusetts Institute of Technology, AgeLab, Cambridge, pp 1–16
Alatas B (2019) Sports inspired computational intelligence algorithms for global optimization. Artif Intell Rev 52(3):1579–1627
Askari Q, Saeed M, Younas I (2020) Heap-based optimizer inspired by corporate rank hierarchy for global optimization. Expert Syst Appl 161:113702
Azizi A, Vatankhah Barenji A, Hashmipour M (2016) Optimizing radio frequency identification network planning through ring probabilistic logic neurons. Adv Mech Eng 8(8):1687814016663476
Bevrani H, Habibi F, Babahajyani P, Watanabe M, Mitani Y (2012) Intelligent frequency control in an AC microgrid: online PSO-based fuzzy tuning approach. IEEE Trans Smart Grid 3(4):1935–1944
Camacho EF, Ramírez DR, Limón D, De La Peña DM, Alamo T (2010) Model predictive control techniques for hybrid systems. Annu Rev Control 34(1):21–31
Cao Y, Qiao M (2017) Application of fuzzy control in four wheel steering control system. In: 2017 International conference on advanced mechatronic systems (ICAMechS), December. IEEE, pp 62–66
Cheng S, Li L, Chen X, Wu J (2020) Model-predictive-control-based path tracking controller of autonomous vehicle considering parametric uncertainties and velocity-varying. IEEE Trans Ind Electron 68(9):8698–8707
Cui Q, Ding R, Wei C, Zhou B (2021) Path-tracking and lateral stabilisation for autonomous vehicles by using the steering angle envelope. Veh Syst Dyn 59(11):1672–1696
Dahmani H, Pagès O, El Hajjaji A (2015) Observer-based state feedback control for vehicle chassis stability in critical situations. IEEE Trans Control Syst Technol 24(2):636–643
Dhar A, Bhasin S (2020) Indirect adaptive mpc for discrete-time lti system with robust constraint satisfaction. In: 2020 American control conference (ACC), July. IEEE, pp 2407–2412
Ding J, Xiao D, Li X (2020) Gear fault diagnosis based on genetic mutation particle swarm optimization VMD and probabilistic neural network algorithm. IEEE Access 8:18456–18474
Elsisi M, Ebrahim MA (2021) Optimal design of low computational burden model predictive control based on SSDA towards autonomous vehicle under vision dynamics. Int J Intell Syst 36(11):6968–6987
Esmaeili N, Kazemi R, Tabatabaei Oreh SH (2019) An adaptive sliding mode controller for the lateral control of articulated long vehicles. Proc Inst Mech Eng Part K J Multi-Body Dyn 233(3):487–515
Ezugwu AE, Shukla AK, Nath R, Akinyelu AA, Agushaka JO, Chiroma H, Muhuri PK (2021) Metaheuristics: a comprehensive overview and classification along with bibliometric analysis. Artif Intell Rev 54:4237–4316
Faramarzi A, Heidarinejad M, Stephens B, Mirjalili S (2020) Equilibrium optimizer: a novel optimization algorithm. Knowl Based Systems 191:105190
Forbes MG, Patwardhan RS, Hamadah H, Gopaluni RB (2015) Model predictive control in industry: challenges and opportunities. IFAC Pap OnLine 48(8):531–538
Gordon TJ, Lidberg M (2015) Automated driving and autonomous functions on road vehicles. Veh Syst Dyn 53(7):958–994
Guo J, Wang J, Luo Y, Li K (2020) Robust lateral control of autonomous four-wheel independent drive electric vehicles considering the roll effects and actuator faults. Mech Syst Signal Process 143:106773
Hu J, Xiong S, Zha J, Fu C (2020a) Lane detection and trajectory tracking control of autonomous vehicle based on model predictive control. Int J Autom Technol 21(2):285–295
Hu P, Pan JS, Chu SC (2020b) Improved binary grey wolf optimizer and its application for feature selection. Knowl Based Syst 195:105746
Huang C, Naghdy F, Du H (2016) Model predictive control-based lane change control system for an autonomous vehicle. In: 2016 IEEE Region 10 Conference (TENCON), November. IEEE, pp 3349–3354
Huang G, Yuan X, Shi K, Wu X (2019) A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle. J Franklin Inst 356(13):7290–7311
Hung NT, Pascoal AM, Johansen TA (2020) Cooperative path following of constrained autonomous vehicles with model predictive control and event-triggered communications. Int J Robust Nonlinear Control 30(7):2644–2670
Jayabarathi T, Raghunathan T, Adarsh BR, Suganthan PN (2016) Economic dispatch using hybrid grey wolf optimizer. Energy 111:630–641
Ji J, Khajepour A, Melek WW, Huang Y (2016) Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints. IEEE Trans Veh Technol 66(2):952–964
Jiang Z, Xiao B (2018) LQR optimal control research for four-wheel steering forklift based-on state feedback. J Mech Sci Technol 32(6):2789–2801
Kim J, Jon U, Lee H (2020) State-Constrained sub-optimal tracking controller for continuous-time linear time-invariant (CT-LTI) systems and its application for DC motor servo systems. Appl Sci 10(16):5724
Kim M, Lee D, Ahn J, Kim M, Park J (2021) Model predictive control method for autonomous vehicles using time-varying and non-uniformly spaced horizon. IEEE Access 9:86475–86487
Kosecka J, Blasi R, Taylor CJ, Malik J (1997) Vision-based lateral control of vehicles. In: Proceedings of conference on intelligent transportation systems, November. IEEE, pp 900–905
Kosecka J, Blasi R, Taylor CJ, Malik J (1998) A comparative study of vision-based lateral control strategies for autonomous highway driving. In: Proceedings. 1998 IEEE international conference on robotics and automation (Cat. No. 98CH36146), vol 3, May. IEEE, pp 1903–1908
Kouvaritakis B, Cannon M (2016) Model predictive control. Springer, Cham
Lee J, Chang HJ (2018) Explicit model predictive control for linear time-variant systems with application to double-lane-change maneuver. PLoS ONE 13(12):e0208071
Leng B, Jiang Y, Yu Y, Xiong L, Yu Z (2021) Distributed drive electric autonomous vehicle steering angle control based on active disturbance rejection control. Proc Inst Mech Eng Part D J Autom Eng 235(1):128–142
Liu C, Lee S, Varnhagen S, Tseng HE (2017). Path planning for autonomous vehicles using model predictive control. In: 2017 IEEE intelligent vehicles symposium (IV), June. IEEE, pp 174–179
Liu W, Xiong L, Xia X, Lu Y, Gao L, Song S (2020) Vision-aided intelligent vehicle sideslip angle estimation based on a dynamic model. IET Intell Transp Syst 14(10):1183–1189
Luan Z, Zhang J, Zhao W, Wang C (2020) Trajectory tracking control of autonomous vehicle with random network delay. IEEE Trans Veh Technol 69(8):8140–8150
Menhaj MB, Seifipour N (2002) Function optimization by RPLNN. In: Proceedings of the 2002 International joint conference on neural networks IJCNN'02 (Cat. No. 02CH37290), vol 2, May. IEEE, pp 1522–1527
Mesbah A (2016) Stochastic model predictive control: An overview and perspectives for future research. IEEE Control Syst Mag 36(6):30–44
Mirjalili S, Mirjalili SM, Lewis A (2014) Grey wolf optimizer. Adv Eng Softw 69:46–61
Panda M, Das B (2019) Grey wolf optimizer and its applications: a survey. In: Proceedings of the third international conference on Microelectronics, computing and communication systems. Springer, Singapore, pp 179–194
Pereira GC, Svensson L, Lima PF, Mårtensson J (2017) Lateral model predictive control for over-actuated autonomous vehicle. In: 2017 IEEE intelligent vehicles symposium (IV), June. IEEE, pp 310–316
Petrillo A, Salvi A, Santini S, Valente AS (2018) Adaptive multi-agents synchronization for collaborative driving of autonomous vehicles with multiple communication delays. Transp Res Part C Emerg Technol 86:372–392
Precup RE, David RC, Petriu EM (2016) Grey wolf optimizer algorithm-based tuning of fuzzy control systems with reduced parametric sensitivity. IEEE Trans Ind Electron 64(1):527–534
Qu M, Tang J (2019) Probabilistic logic neural networks for reasoning. arXiv preprint. 1906.08495.
Rossiter JA (2017) Model-based predictive control: a practical approach. CRC Press, Boca Raton
Sadollah A, Sayyaadi H, Yadav A (2018) A dynamic metaheuristic optimization model inspired by biological nervous systems: neural network algorithm. Appl Soft Comput 71:747–782
Seyfipour N, Menhaj M, Nik RS (2003) A new optimization method by ring probabilistic logic neural networks. Amirkabir J Sci Technol 14:43–57
Shehab M, Khader AT, Laouchedi M (2018) A hybrid method based on cuckoo search algorithm for global optimization problems. J Inf Commun Technol 17(3):469–491
Shi Q, Zhao J, Han L, Ning Y, Wang G (2016). Dynamic lane tracking system based on multi-model fuzzy controller. In: 2016 IEEE international conference on mechatronics and automation, August. IEEE, pp 873–877
Tang PH, Tseng MH (2013) Adaptive directed mutation for real-coded genetic algorithms. Appl Soft Comput 13(1):600–614
Tang L, Yan F, Zou B, Wang K, Lv C (2020) An improved kinematic model predictive control for high-speed path tracking of autonomous vehicles. IEEE Access 8:51400–51413
Tzanetos A, Dounias G (2021) Nature inspired optimization algorithms or simply variations of metaheuristics? Artif Intell Rev 54(3):1841–1862
Van Brummelen J, O’Brien M, Gruyer D, Najjaran H (2018) Autonomous vehicle perception: The technology of today and tomorrow. Transp Res Part C Emerg Technol 89:384–406
Van Parys R, Pipeleers G (2018) Real-time proximal gradient method for linear MPC. In: 2018 European control conference (ECC), June. IEEE, pp 1142–1147
Wan Z, Wang G, Sun B (2013) A hybrid intelligent algorithm by combining particle swarm optimization with chaos searching technique for solving nonlinear bilevel programming problems. Swarm Evol Comput 8:26–32
Wang X, Fu M, Ma H, Yang Y (2015) Lateral control of autonomous vehicles based on fuzzy logic. Control Eng Pract 34:1–17
Wang Y, Liu Y, Fujimoto H, Hori Y (2018) Vision-based lateral state estimation for integrated control of automated vehicles considering multirate and unevenly delayed measurements. IEEE/ASME Trans Mechatron 23(6):2619–2627
Xia Y, Pu F, Li S, Gao Y (2016) Lateral path tracking control of autonomous land vehicle based on ADRC and differential flatness. IEEE Trans Ind Electron 63(5):3091–3099
Xu Y, Tang W, Chen B, Qiu L, Yang R (2021) A model predictive control with preview-follower theory algorithm for trajectory tracking control in autonomous vehicles. Symmetry 13(3):381
Zeng GQ, Chen J, Li LM, Chen MR, Wu L, Dai YX, Zheng CW (2016) An improved multi-objective population-based extremal optimization algorithm with polynomial mutation. Inf Sci 330:49–73
Zhang H, Wang J (2015) Vehicle lateral dynamics control through AFS/DYC and robust gain-scheduling approach. IEEE Trans Veh Technol 65(1):489–494
Zhu S, Gelbal SY, Aksun-Guvenc B, Guvenc L (2019) Parameter-space based robust gain-scheduling design of automated vehicle lateral control. IEEE Trans Veh Technol 68(10):9660–9671
Acknowledgements
This work was supported by the Ministry of Science and Technology (MOST) of Taiwan (Grant No.: MOST 110-2222-E-011-013-) and the Center for Cyber-physical System Innovation from the Featured Areas Research Center Program in the Agenda of the Ministry of Education (MOE), Taiwan.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Elsisi, M. Improved grey wolf optimizer based on opposition and quasi learning approaches for optimization: case study autonomous vehicle including vision system. Artif Intell Rev 55, 5597–5620 (2022). https://doi.org/10.1007/s10462-022-10137-0
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10462-022-10137-0