
Abstract
Water losses in water distribution systems are typically analysed using extended period simulations, where its numerical resolution is commonly achieved using the gradient method. These models assume that adjustments to regulating valves occur, either manually or automatically, over an extended period of time, then the system inertia can be neglected. This research introduces the development of a rigid water column model for analysing water leakages in single pipelines, which can be employed to account for regulation valve adjustments in shorter time periods, thereby providing greater accuracy when assessing water losses. The application to a case study is presented to analyse pressure variations and leakage flow patterns over 30, 60, and 180 s. A comparison between the extended period simulation and rigid water column model is presented in order to note the order of magnitude on leakages when the system inertia is not considered. The results confirm that is crucial for water utilities the consideration of inertial system to simulate adequately opening and closure manoeuvres in water distribution systems, since according to the case study the extended period simulation can overestimated or underestimated the total leakage volume in percentages of 37.1 and 55.2 \(\%\), respectively.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Water distribution systems (WDS) suffer from leakages causing social and economic costs (Gupta and Kulat 2018) to reduce operation and maintenance costs, water utility companies must effectively manage water leakage in their supply systems (Ramos et al. 2023; Conejos Fuertes et al. 2020). These leaks are often caused by excessive pressure or inefficient management by utility companies (Valdez et al. 2016). Because all supply systems eventually suffer from leakages, efficient management is required to effectively identify the origin of leaks (Avila et al. 2021; Asada et al. 2021). Hence, water utility companies must establish pipe-leakage mitigation programmes aimed at improving the service efficiency and decreasing costs borne by water treatment plants, which is of the utmost important for establishing reliable digital twins in water distribution systems (Bonilla et al. 2022; Galdiero et al. 2015). According to the International Water Association (IWA) conventions (Lambert and Hirner 2000), water flow in the supply systems is divided into two types of flows: (i) the flow rate measured, which represents the authorised/billed consumption at households, industries, businesses and institutions and (ii) the uncontrolled flow rate, which is subdivided into apparent losses (customer flow meter inaccuracies, unmetered consumption, unauthorised consumption, water used for fire-fighting and water used for cleaning streets and public areas) and physical losses (leakages).
Leakage occurs in all WDS and depends on network features, the tightness obtained during the construction process, the operation practices of the corresponding water utility companies and the level of technology and expertise used for managing WDS. Water losses vary among different countries and different regions within countries; therefore, the strategy used for mitigating leakage depends largely on the understanding of each component of WDS (Germanopoulos and Jowitt 1989). Because leakage is related to energy costs of WDS, effective leakage control is necessary to ensure social, economic, and environmental sustainability (Bhaduri et al. 2015). If effective measures are not implemented to manage water losses due to leakages, drinking water supply will be insufficient to meet the basic needs of people, thereby increasing costs exponentially. Therefore, studying water-leakage patterns in WDS is necessary for utility companies globally to prevent high distribution costs (Voogd et al. 2021).
Every loss mitigation programme starts with an analysis of the water balance of the WDS being assessed. Next, implementing a mathematical model is necessary for studying the WDS. Herein, water leakage is simulated considering pressure-based consumption. Currently, water flow rates and node pressures in pipes are determined using simulation models for an extended period (quasi-static models), wherein the energy and continuity equations are solved simultaneously using the gradient method (Salgado et al. 1988). Excess water pressure can be reduced and managed by installing pressure reducing valves (PRVs) at specific points and replacing pipe sections to improve hydraulic behaviour, thus realising highly efficient water distribution management (Xue et al. 2022). PRVs help maintain an adequate service pressure throughout the day and specifically at night, reducing the water-leakage volume. Service pressure in WDS, which is indicated by the valve resistance coefficient, is directly related to PRV position. However, the continuous variations in PRV in WDS result in pressure oscillations that cannot be measured using the quasi-static model or extended period simulation (EPS) (Almandoz et al. 2005) because this model does not consider the hydraulic system inertia. The accuracy of the results obtained using the quasi-static model decreases with increasing variations in PRV opening-closure. The occurrence of transient events helps in detecting leakages in a WDS (Brunone et al. 2022). Recently, Ayedet al. (2023) proposed a transient flow model to assess the volume of water leaked from a pipe joint; however, this model failed to consider the water balance of a WDS and did not allow the measurement of water losses based on pressure-based consumption. This study proposes the development of a rigid inertial model (also known as Euler’s equation) aimed at assessing water leakage in a WDS. This model can be used to effectively measure pressure pulses produced owing to PRV openings-closures; no deformations are expected to occur in the pipe walls or the fluid owing to the service pressure in WDS (Coronado-Hernández et al. 2018). The proposed model affords new in the field of water-leakage mitigation in WDS because to the best of our knowledge, no existing study measures pressure variations related to PRV in short time periods. The simulation and numerical calculation on pipeline leakage process was evaluated by Yang et al. (2010), showing the need to analyse the behaviour in other elements of the water systems (i.e., valves, derivations, control elements, among others). Xu et al. (2004) estimated the maximum leakage applied to small circuits, showing the need to analyse the behaviour of the water distribution system. In this line, the novel of this manuscript is based on developing the fundamental method to extrapolate WDS, improving the simulation and calibration of them. Moreover, the proposed model can provide a better understanding of water-leakage volumes and become a more reliable tool than the quasi-static model for utility companies to establish water loss management programmes. Because mitigating water leakage is of utmost importance for utility companies, the development of new mathematical models for leakage assessment is of great interest to the efficiency and sustainability of water companies.
Current mathematical models used for to assess water losses in WDS use quasi-static models to measure water loss volumes during a given period of time, usually 24 hours. These models neglect the system inertia generated owing to local and/or convective velocity. Nevertheless, water utility companies must constrain the service pressure at night to reduce water losses, which requires control-valve operations based on quasi-static models. When rapid variations occur in the operation of control valves, the system inertia can produce variations in the system pressure evolution and consequently in the water leakage. Pressure oscillations caused by variations in control-valve operations can be used to detect leakage and clogged pipes (Brunone et al. 2023). This study proposes algebraic differential equations using the local velocity term to assess water leaks based on the hydraulic system inertia. The proposed model can be used to evaluate water leakages considering opening and closure manoeuvres in single pipelines.
2 Materials and Methods
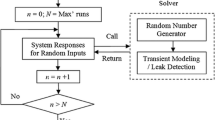
This section shows the methodology used in this research, which is presented in Fig. 1. The objective of this research is the development of a rigid water column model (RWCM) for computing water leakages in single pipelines, which could be extrapolated to other more complex water systems in future research. The proposal methodology is divided in five steps, as follows:
2.1 Step 1: Model Case Study
A model case study is developed, defining the parameters of the reservoir (i.e., head), pipes (i.e., roughness, length, and diameter) and valves (opening degree and dimensionless coefficient headloss). The development of the model enable the development of the different mathematical model (RWCM model) and topology model in the EPS. The model is completed considered the inputs values, which are focused on the hourly consumption patterns and the base demand of the consumption joints. The input data are required for analysing leakages in water distribution systems, which can be characterized by water utility companies through the installation of flow meters. The definition of topological characteristics of a water installation should be defined (case study).

Methodology
The proposed methodology can be applied to any distribution system and valve type. Therefore, the equations proposed in this research can be extrapolated to any type of valve. However, the application of these models is of interest when the opening or closing of the elements occurs abruptly and quickly.
2.2 Step 2: Definition of the Leakages Coefficients
The leakages should be considered in mathematical models, therefore the different coefficients should be considered. Currently, (1) can be used to evaluate the leakage in each element (i.e., line or tap).
where \(Q_{ul}\) is the leakage flow rate (i.e., line or consumption point), \(p_2/\gamma _w\) is the pressure head (if the element is a line, the chosen pressure is the average pressure value of the line), N is the leakage exponent, and \(K_f\) is the global emitter coefficient.
The leakage volume for a single pipeline is estimated by (2)
where T is the total time, \(\Delta T\) is the interval time, and \(V_{ul}\) is the leakage volume.
When the flow injected is equal to measured and uncontrolled flow, the calibration is considered correct, and the methodology enable the development of the steps 3 (Section 2.3) and 4 (Section 2.4).
2.3 Step 3: Extended Period Simulation
The EPS has been used for different authors to compute water leakages in WDS (Almandoz et al. 2005; Giustolisi et al. 2008) in the last decades. Usually, EPANET software has been utilised considering the water balance proposed by the IWA (Lambert and Hirner 2000). The Bernoulli equation is used to describe the water movement along an installation. The emitter coefficient (see (1)) must be calibrated. The calibration process finishes when the injected flow rate (measured by a water utility company) gives similar values compared to the results obtained with the mathematical model.
The used emitter coefficient in EPANET is:
\(\beta \) varies between \(10^{-4}\) and \(10^{-7}\) as a function of the material (cement, steel or PVC) (Maskit and Ostfeld 2014). It grows over time and this increase depends on the material. Different scenarios are defined in this case, which weighted the \(\beta \) value. Besides, N exponent is defined in the calibration model, estimating the value through of normalized valued, which oscillates between 0.5 and 2.5 according to published researches (Maskit and Ostfeld 2014; Van Zyl and Clayton 2007).
In this research, the EPS is modelled for a case study to quantify the water leakages in a single pipeline. For the same case study, the proposed model (RWCM) is also applied (see Section 2.4) to observe the different when manoeuvres in a regulating valve is performed in a short time period.
2.4 Step 4: Rigid Water Column Model
Currently, water leakage assessment models use the Bernoulli equation in extended periods because control-valve operations are performed in a controlled and prolonged manner. Herein, water leakage was determined using the RWCM, which is the main contribution of this research since a mathematical model is developed.
The main assumptions of the proposed model are outlined as follows:
-
The mass oscillation equation is employed to monitor water movement.
-
The diameter and absolute roughness of pipes remain constant along water installations.
-
The friction factor for calculating losses is determined using the Swamee-Jain equation.
-
Water leakages are assumed to occur such that pipe and water elasticity effects are negligible during transient events

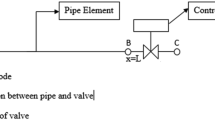
Simple Pipe Scheme
The mathematical model used to assess leakage in a simple pipe as presented in Fig. 2 uses the water balance expressed as follows:
where \(Q_{iny}\) = injected flow rate (m\(^3\)/s), \(Q_{m}\) = flow rate measured (m\(^3\)/s), and \(Q_{u}\) = uncontrolled flow rate (m\(^3\)/s)
Considering the main components of the water balance proposed by the International Water Association:
where \(Q_{md}\) = domestic consumption, \(Q_{mc}\) = commercial consumption, \(Q_{mi}\) = industrial consumption, \(Q_{mo}\) = official consumption (m\(^3\)/s), \(Q_{ua}\) = flow rate due to apparent losses, \(Q_{uae}\) = undetected flow rate due to metering errors, \(Q_{uaq}\) = flow rate billed by fixed quota users, \(Q_{uaq}\) = flow rate by illegal use, \(Q_{uah}\) = flow rate used for fire hydrants, \(Q_{uaq}\) = flow rate used for system flushing, and \(Q_{ul}\) = flow rate due to physical leakages.
All flow rate measured consumptions (\(Q_m\)) are considered independent of pressure head (\(p_2/\gamma _w\)). These values can be evaluated using a nodal consumption where \(Q_m\) can be simulated considering pressure-independent consumption. Downstream, pressure varies over time, so \(Q_m\) is determined using (6):
where \(C_m\) = the \(Q_m\) modulation coefficient and \(\overline{Q_m}\) = the average \(Q_m\).
However, consumption \(Q_{ul} \) is dependent on pressure (Almandoz et al. 2005; Giustolisi et al. 2008); that is, the higher the pressure, the higher the consumption and vice versa. Equation 7 demonstrates that water loss is highest at night. For assessment purposes, the emitter exponent was considered to be 0.5, which has been widely adopted by many authors (Almandoz et al. 2005 ;?).
where \(K_f\) = emitter coefficient, \(p_2/\gamma _w\) = pressure at node 2 and \(\gamma _w\)= water specific weight.
Substituting (6) and (7) in (5) and disregarding the consumptions from the International Water Association, (8) is obtained:
The continuity and momentum equations for a simple pipe are given as follows:
where f = friction factor, g = gravity acceleration, l = length of pipe (m), A = cross-sectional area of pipe, \(d_0\) = internal diameter of the pipe (m), \(\Sigma k_m\) = global coefficient of minor losses, H = hydraulic grade line, and \(R_v\) = valve resistance coefficient.
Considering that water leakages tend to reduce the increased pressure in the pipe created owing to automatic variations in PRV operations, the pipe is not expected to suffer deformations and the water column is not expected to be compressed during these variations. Therefore, a rigid pipe is considered, which implies that the wave speed tends to infinity (\(a\rightarrow \infty \)). Hence, (\(\partial Q_{iny}/\partial x=0\)), thereby demonstrating that the continuity equation is reduced to (11):
Upon dividing gA in the momentum equation, (12) is obtained:
When integrating a generic t value along a pipe with an area of A between two points with a length of l, then:
After integrating and rearranging the terms:
Finally, when assessing energies at points 1 and 2, thus:
where z = corresponds to an elevation of the pipe profile.
This equation simulates water behaviour based on the RWCM (Coronado-Hernández et al. 2018). By replacing the terms and solving (15):
The friction factor can be determined using the Swamee-Jain formula.
where \(k_s\) = absolute roughness of a pipe and Re = Reynolds number.
The Reynolds number is defined by relationship \(\frac{v_wd_0}{\nu }\), where \(v_w\) = water velocity (injected flow rate) and \(\nu \) = kinematic viscosity.

Modulation Coefficients: (a) Domestic consumption; and (b) Industrial consumption
2.5 Step 5: Comparison and Discussion Results
This step considers the assessment of water leakages using different typical behaviours and applications of the EPS and RWCM. The RWCM surpasses EPS by incorporating the system inertia term (\(\frac{dQ_{iny}}{dt}\)), essential for accurately simulating rapid maneuvers induced by regulating valves. Conversely, the EPS overlooks this crucial term. The analysis shows the discrepancies on the estimation of volume leakages for a case study considering domestic and industrial consumption patterns.
The next section presents the application of the used methodology to a case study.
3 Analysis of Results
In order to assess changes in water leakage, the following characteristics of a simple pipe has been considered: l = 1300 m, \(d_0\) = 300 mm, \(k_s\) = 0.0015 mm, \(\Delta z = z_1 - z_2\) = 45 m, \(\Sigma k_m\) = 5, and \(R_v\) = 210 ms\(^2\)/m\(^6\). For this analysis, a kinematic viscosity (\(\upsilon \)) of \(1x10^{-6}\) m\(^2\)/s was considered. To perform the water balance, the following data were obtained: \(\overline{Q}_{iny}\) = 140.0 l/s and \(\overline{Q}_r\) = 91.0 l/s (with \(\overline{Q}_{md}\) = 75.5 l/s and \(\overline{Q}_{mi}\) = 15.5 l/s). Figure 3 shows the modulation coefficients for domestic and industrial consumption. For the domestic consumption, the peak coefficient is found from 9:00 to 10:00 h, while the minimum coefficient of 0.1 is detected between 4:00 to 6:00 h. For the industrial consumption, the maximum and minimum values are 1.6 (12:00 to 13:00) and 0.4 (0:00 to 1:00), respectively. The case study considered is a classical urban supply model that considers flow variations over time with an urban consumption pattern used in different journal publications. This implies its representativeness in the analysis of results for real cases.
The water balance has been addressed considering a domestic and industrial consumptions and the water leakage. In this sense, (8) can be reduced as:
The EPS was run to know the water behaviour over 1 day. The input parameters were determined by solving (8), (16) and (17) considering a zero local velocity (\(dQ_{iny}/dt\)=0). An emitter coefficient (\(K_f\)) of 9.29 l/s/wmc\(^{0.5}\) was previously calibrated. The water flow in the entrance of the single pipeline was at t = 0 h for 79 l/s, which were considered as the initial conditions for the mathematical model. Figure 4 shows the results obtained from applying the EPS. The maximum pressure is 39.5 m , occurring from 4:00 to 6:00 a.m. For this period, the highest water leakage of 59.1 l/s is reported. The highest flow in the water treatment plant is 197.3 l/s (from 9 to 10 am) and the minimum is 79 l/s (from 4 to 6 am). The EPS represents leaked flow patterns effectively.

Analysis of the water balance under an EPS
Since water utilities need to control downstream pressure head, then a value of 15 m was imposed in the pressure reducing valve (PRV). The EPS was run using a PRV, which is named as EPS-PRV. If \(\frac{p_2}{\gamma _w} = 15\) m, then the resistance coefficient (\(R_v\)) can be computed using (19):
The RWCM was simulated using formulations 8, 16, and 17. A regulating valve is manipulated for two scenarios: (i) considering an opening manoeuvre (RWCM-Opening) with a minimum \(R_v\) value of 9000 ms\(^2\)/m\(^6\) (at 30 s); and (ii) a closure manoeuvre (RWCM-Closure) with a maximum value of 210 ms\(^2\)/m\(^6\) (at 30 s). Figure 5 presents the simulation during the first 180 s for the EPS, EPS-PRV, RWCM-Opening, and RWCM-Closure. Figure 5a shows the behaviour of pressure head for the different simulations, where the EPS trends to a constant value of 39.4 m for the analysed period. Similarly, the EPS-PRV provides a constant value of 15 m, as expected for the function imposed by the valve. The RWCM-Opening starts at 39.7 m (\(t=0\) s), but after the opening of the regulating valve, the pressure head reaches a constant value of 38.68 m at \(t=\)38.5 s. For the RWCM-Closure, the pressure head attains its minimum value after the closure manoeuvre (30 s) with a value of 14.26 m. The injected flow has also different patterns considering the analysed simulations(Fig. 5b). The total flow presents a constant value of 79.6 l/s for the first 180 s (EPS), while the EPS-PRV shows a reduction of 22.3 l/s in comparison to the EPS, since a constant value of 57.3 l/s is detected by the model. Considering the results of the RWCM-opening, the minimum injected flow is reached at 5 s with a flow of 57.1 l/s. After 38.5 s, the injected flow trends to a constant value of 79.8 l/s. The injected flow attains a minimum value of 56.4 l/s (at t=35.5 s) for the RWCM-Closure. The behaviour of water leakage (\(Q_{ul}\)) is similar to the behaviour of injected flow (\(Q_{iny}\)) since domestic and industrial consumption are not varying for this period, as shown in Fig. 5c. Figure 5d presents the variation of the resistance coefficients (\(R_v\)) analysed for the current simulations. The proposed model and the EPS trend to give similar results after the total opening or closure of the regulating valve (at \(t=\) 38.5 s).

Comparison between EPS, EPS-PRV, RWCM-opening, and RWCM-Closure models: (a) Pressure head; (b) Injected flow rate (\(Q_{iny}\)); (c) Physical leakages (\(Q_{ul}\)); and (d) Resistance coefficient (\(R_v\))
Table 1 presents the leakage volumes computed for periods of 30, 60, and 180 s. As expected, the EPS gives the greatest leakage water volume compared to the other simulations. Considering the first 30 s (see Fig. 5) the leakage volume computed for the EPS is 1.75 m\(^3\). The minimum values of leakage volume are obtained with the EPS-PRV, where for a total time of 180 s, a leakage water volume of 6.49 m\(^3\) is computed. The EPS and EPS-PRV cannot detect opening and closure manoeuvres of regulating valves, which are represented as RWCM-Opening and RWCM-Closure, respectively. For time periods of 60 and 180 s, the RWCM-Opening provides higher leakage water volume compared to the RWCM-Closure. The RWCM-Opening underestimated the total water volume of leakages in percentages ranging from 4.0 to 25.7 \(\%\) from the EPS, while RWCM-Closure presents values from 23.4 to 37.1 \(\%\) . When the PRV is acting, under EPS-PRV, the RWCM-Opening showed an overestimation of the total water volume varying from 18.2 to 55.2 \(\%\). The RWCM-Closure provided values with percentages from 1.7 to 21.8 \(\%\) from the EPS-PRV. When the inertia system is not considered, then the EPS does not estimate accuracy the total water leakages when regulating valve are acting for short time periods. Thus, the RWCM plays an important role to quantity the total water leakages for these kind of manoeuvres.
Addressing more accurate modelling of leakage when regulating elements act in distribution systems will allow network managers to improve real technical indicators of operation, energy efficiency and address economic evaluations with greater rigour that can provide a rigorous assessment and can establish implications with the evaluation of the different targets of the sustainable development goals.
This research introduces a pioneering method for analysing water leakages in single pipes, offering valuable insights for decision-making concerning the operation of regulating valves during opening and closure manoeuvres, an aspect currently overlooked in the existing model. The proposed model is based on physical formulations, then it holds relevance across diverse installations. Future investigations should focus on mathematically formulating water volume leakages utilizing the RWCM for series, parallel, and more intricate network configurations.
4 Conclusions
In this study, a mathematical model to simulate the behaviour of water-leakage flow considering the RWCM was developed. The proposed model is more effective compared to the EPS since it is suitable to represent rapid manoeuvres in regulating valves. The proposed model was applied to a case study where domestic and industrial consumptions were reported. The initial condition of the mathematical model is the one obtained from the EPS. For the assessment, the emitter coefficient was calculated using the results of the quasi-static model. The numerical resolution of the algebraic-differential system provides a satisfactory solution to the water-leakage flow problem because the resolution satisfies the condition that states the water-leakage flow increases with pressure and vice versa. The proposed model can represent pressure head and leakages flow rate pulses for short and large time periods, which could be applied in more complex water systems. This study confirmed that the system inertial will have substantial influence on the water-leakage flow, thus yielding results that can be substantially different from those obtained using the EPS. When opening and closure manoeuvres are performed, then discrepancies between 4.0 to 25.7 \(\%\) and 23.4 to 37.1\(\%\) are found regarding the EPS for the analysed case study.The implementation of the proposed model can be considered for developing digital twins approaches in water improving the sustainability management of the water systems.
It is crucial to highlight that the proposed model holds significant importance for water utilities, enabling the computation of water volume leakages under specified scenarios where system inertia resulting from the operation of regulating valves occurs, a capability absent in the EPS. Accurately determining water volume leakages is essential for comprehending the interplay between water and energy in water distribution systems.
5 Notation
The following symbols are used in this paper:
-
A cross-sectional area of pipe (m\(^2\));
-
\(C_m\) modulation coefficient (-);
-
\(C_{md}\) modulation coefficient for a domestic consumption (-);
-
\(C_{mi}\) modulation coefficient for an industrial consumption (-);
-
\(d_0\) internal pipe diameter (m);
-
f pipe wall friction coefficient (–);
-
\(\Sigma k_m\) global coefficient of minor-loss (–);
-
\(K_f\) emitter coefficient (m\(^3\)/s/m\(^{0.5}\));
-
\(k_s\) absolute roughness (m);
-
g gravity acceleration (m/s\(^{2}\));
-
H hydraulic grade line (m);
-
l pipe length (m);
-
N leakage exponent (-);
-
\(p_2\) downstream pressure head (Pa);
-
\(Q_{iny}\) injected flow rate (m\(^3\)/s);
-
\(Q_{m}\) flow rate measured (m\(^3\)/s);
-
\(Q_{u}\) uncontrolled flow rate (m\(^3\)/s);
-
\(Q_{md}\) domestic consumption (m\(^3\)/s);
-
\(Q_{mc}\) commercial consumption (m\(^3\)/s);
-
\(Q_{mi}\) industrial consumption (m\(^3\)/s);
-
\(Q_{mo}\) official consumption (m\(^3\)/s);
-
\(Q_{ua}\) flow rate due to apparent losses (m\(^3\)/s);
-
\(Q_{ul}\) flow rate due to physical leakages (m\(^3\)/s);
-
\(Q_{uae}\) undetected flow rate due to metering errors (m\(^3\)/s);
-
\(Q_{uaq}\) flow rate billed by fixed quota users (m\(^3\)/s);
-
\(Q_{uaq}\) flow rate by illegal use (m\(^3\)/s);
-
\(Q_{uah}\) flow rate used for fire hydrants (m\(^3\)/s);
-
\(Q_{uaq}\) flow rate used for system flushing (m\(^3\)/s);
-
\(R_v\) resistance coefficient of a regulating valve (ms\(^2\)/m\(^6\));
-
\(R_e\) Reynolds number (-);
-
t time (s);
-
T simulation time (s);
-
x distance along a pipeline (m);
-
\(V_{ul}\) leakage volume (m\(^3\));
-
z elevation (m);
-
\(\gamma _w\) water unit weight (N/m\(^3\));
-
\(v_w\) water velocity (injected flow rate) (m/s);
-
\(\nu \) kinematic viscosity (m\(^2\)/s);
-
\(\Delta T\) interval time (s);
Availability of Data and Materials
The data of this research are available from the corresponding author, upon reasonable request.
References
Almandoz J, Cabrera E, Arregui F et al (2005) Leakage assessment through water distribution network simulation. J Water Res Planning Manag 131(6):458–466. https://doi.org/10.1061/(ASCE)0733-9496(2005)131:6(458)
Asada Y, Kimura M, Azechi I et al (2021) Leak detection method using energy dissipation model in a pressurized pipeline. J Hydraul Res 59(4):670–682. https://doi.org/10.1080/00221686.2020.1818308
Avila CAM, Sánchez-Romero FJ, López-Jiménez PA et al (2021) Leakage management and pipe system efficiency. its influence in the improvement of the efficiency indexes. Water 13(14):1909. https://doi.org/10.3390/w13141909
Ayed L, Hafsi Z, Elaoud S et al (2023) A transient-based analysis of a leak in a junction of a series pipe system: Mathematical development and numerical modeling. J Pipeline Syst Eng Pract 14(2):04023009. https://doi.org/10.1061/JPSEA2.PSENG-141
Bhaduri A, Ringler C, Dombrowski I et al (2015) Sustainability in the water-energy-food nexus. https://doi.org/10.1016/j.energy.2015.09.104
Bonilla CA, Zanfei A, Brentan B et al (2022) A digital twin of a water distribution system by using graph convolutional networks for pump speed-based state estimation. Water 14(4):514. https://doi.org/10.3390/w14040514
Brunone B, Maietta F, Capponi C et al (2022) A review of physical experiments for leak detection in water pipes through transient tests for addressing future research. J Hydraul Res 60(6):894–906. https://doi.org/10.1080/00221686.2022.2067086
Brunone B, Maietta F, Capponi C et al (2023) Detection of partial blockages in pressurized pipes by transient tests: A review of the physical experiments. Fluids 8(1):19. https://doi.org/10.3390/fluids8010019
Conejos Fuertes P, Martínez Alzamora F, Hervás Carot M et al (2020) Building and exploiting a digital twin for the management of drinking water distribution networks. Urban Water J 17(8):704–713. https://doi.org/10.1080/1573062X.2020.1771382
Coronado-Hernández OE, Fuertes-Miquel VS, Iglesias-Rey PL et al (2018) Rigid water column model for simulating the emptying process in a pipeline using pressurized air. J Hydraul Eng 144(4):06018004. https://doi.org/10.1061/(ASCE)HY.1943-7900.000144
Galdiero E, De Paola F, Fontana N et al (2015) Decision support system for the optimal design of district metered areas. J Hydroinf 18(1):49–61. https://doi.org/10.2166/hydro.2015.023
Germanopoulos G, Jowitt P (1989) Leakage reduction by excess pressure minimization in a water supply network. Proc Inst Civ Eng 87(2):195–214. https://doi.org/10.1680/iicep.1989.2003
Giustolisi O, Savic D, Kapelan Z (2008) Pressure-driven demand and leakage simulation for water distribution networks. J Hydraul Eng 134(5):626–635. https://doi.org/10.1061/(ASCE)0733-9429(2008)134:5(626)
Gupta A, Kulat KD (2018) A selective literature review on leak management techniques for water distribution system. Water Res Manag 32:3247–3269. https://doi.org/10.1007/s11269-018-1985-6
Lambert A, Hirner W (2000) Losses from Water Supply Systems: Astandard Terminology and Recommended Performance Measures. IWA
Maskit M, Ostfeld A (2014) Leakage calibration of water distribution networks. Proc Eng 89:664–671. https://doi.org/10.1016/j.proeng.2014.11.492
Ramos HM, Kuriqi A, Coronado-Hernández OE et al (2023) Are digital twins improving urban-water systems efficiency and sustainable development goals? UrbanWater J pp 1–13. https://doi.org/10.1080/1573062X.2023.2180396
Salgado R, Todini E, O’connell P (1988) Comparison of the gradient method with some traditional methods for the analysisof water supply distribution networks. In: Computer applications in water supply: vol 1-systems analysis and simulation p 38–62
Valdez MC, Adler I, Barrett M et al (2016) The water-energy-carbon nexus: optimising rainwater harvesting in mexico city. Environmen Proc 3:307–323. https://doi.org/10.1007/s40710-016-0138-2
Van Zyl J, Clayton C (2007) The effect of pressure on leakage in water distribution systems. In: Proceedings of the Institution of Civil Engineers-Water Management, Thomas Telford Ltd, pp 109–114. https://doi.org/10.1680/wama.2007.160.2.109
Voogd R, de Vries JR, Beunen R (2021) Understanding public trust in water managers: Findings from the netherlands. J Environmen Manag 300:113749. https://doi.org/10.1016/j.jenvman.2021.113749
Xu Y, Luo Z, Li X (2004) A maximum total leakage current estimation method. In: 2004 IEEE International symposium on circuits and systems (ISCAS), IEEE, pp II–757. https://doi.org/10.1109/ISCAS.2004.1329382
Xue M, Chew A, Cai J et al (2022) Improving near real-time anomaly event detection and classification with trend change detection for smart water grid operation management. Urban Water J 19(6):547–557. https://doi.org/10.1080/1573062X.2022.2058565
Yang Z, Fan S, Xiong T (2010) Simulation and numerical calculation on pipeline leakage process. In: 2010 2nd International symposium on information engineering and electronic commerce, IEEE, pp 1–5. https://doi.org/10.1109/IEEC.2010.5533189
Acknowledgements
This work was supported by CERIS (CEHIDRO-IST). The research was developed along on research stay of the second author called “THE IMPROVEMENT OF THE ENERGY EFFICIENCY IN WATER SYSTEMS USING MICROHYDROPOWERS SYSTEMS AND OTHER RENEWABLE SYSTEMS”.
Funding
Open Access funding provided thanks to the CRUE-CSIC agreement with Springer Nature. For open access charge: CRUE-Universitat Politàcnica de València.
Author information
Authors and Affiliations
Contributions
Conceptualization, O.E.C-H, A.A-P and V.S.F-M; Methodology, O.E.C-H., M.P-S., and H.M.R.; Resources, H.M.R., J.R.C-H., and E.Q-B.; Investigation, J.R.C-H, M.P-S, and E.Q-B.; Writing-review and editing, O.E.C-H, A.A-P, and H.M.R.
Corresponding author
Ethics declarations
Ethical Approval
Not applicable.
Consent to Participate
All authors consented to participate.
Consent to Publish
All authors consented to publish.
Competing Interests
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Coronado-Hernández, O.E., Pérez-Sánchez, M., Arrieta-Pastrana, A. et al. Dynamic Effects of a Regulating Valve in the Assessment of Water Leakages in Single Pipelines. Water Resour Manage 38, 2889–2903 (2024). https://doi.org/10.1007/s11269-024-03797-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11269-024-03797-w