
The current analytical models are insufficient to describe the ploughing part of the friction coefficient when there is elastic recovery at the rear part of the contact after passage of a moving tip. A solution for the case of a perfectly conical tip was proposed recently. This paper presents a model to describe the ploughing friction for a perfectly spherical tip and then develops this analysis for the case of a conical tip with a blunted spherical extremity. The major difficulty resides in taking into account the shape of the contact area in relation to the elastic, elastoplastic or plastic behaviour of the contact.




Similar content being viewed by others
References
Moore D.F., The Friction and Lubrication of Elastomers (Pergamon Press London 1972)
Bowden F.P., Tabor D., The Friction and Lubrification of Solids (Vol I, Clarendon Press Oxford 1950–1954)
Goddard J., Wilman H., (1962) Wear 5: 114
Gauthier C., Lafaye S., Schirrer R., (2001) Tribol. Int. 34 (7): 469
Sabey B.E., (1958) Proc. Phys. Soc. 71 (B): 979
Bucaille J.-L., Felder E., Hochstetter G., (2001) Wear 249 (5–6): 422
S. Lafaye, C. Gauthier and R. Schirrer, J. Mat. Sci. (2006) (in press)
Lafaye S., Gauthier C., Schirrer R., (2005) Tribol. Int. 38 (2): 113
Gauthier C., Schirrer R., (2000) J. Mat. Sci. 35 (9): 2121
J.L. Bucaille, C. Gauthier, E. Felder and R. Schirrer, Wear (in press), doi:10.1016/j.wear.2005.04.007
Tabor D., The Hardness of Metal (Clarendon Press Oxford 1951)
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Evaluation of S n and S t in the case of a perfectly spherical tip with elastic recovery
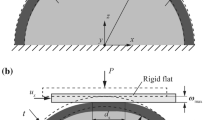
In all cases, the normal section (see figure 5(a)) is given by:
The cross section of the contact area S t is the truncated disc of radius ρ such that
formed by the intersection of the sphere of centre (O) and radius R (see figure 5(b)) with the plane \(x = a\sin \omega \). This section is shown in grey in figure 5(b) and 5(c). The centre (O) of the sphere does not coincide with the centre (H) of the disc forming the cross section except if the contact width is equal to the radius of the spherical tip. S t is then a section of this disc limited by the horizontal plane of radius a.

Schematisation of the normal section showing the elastic recovery represented by the rear angle ω (a). Definition of the cross section in the case of a spherical tip (b) and front view of the cross section in grey (b) and (c). Definition of the parameters used to evaluate the cross section (c).
S α is the area of the triangle (OQP) such that \((\overrightarrow {{\text{OQ}}} ,\overrightarrow {{\text{OP}}} ) = 2\alpha \) and we then have:
h being the depth of the contact \(h = \rho - \sqrt {\rho ^2 - a^2 \cos ^2 \omega } \)
Since \(S_{\text{p}} = S_{\text{t}} + S_\alpha \) and
with \(\sin \;\alpha = \frac{{a\;\cos \omega }} {\rho }\)
S t is equal to \(S_{\text{p}} - S_\alpha \) and hence:
Finally, replacing ρ in this expression:
Rights and permissions
About this article
Cite this article
Lafaye, S., Gauthier, C. & Schirrer, R. The ploughing friction: analytical model with elastic recovery for a conical tip with a blunted spherical extremity. Tribol Lett 21, 95–99 (2006). https://doi.org/10.1007/s11249-006-9018-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11249-006-9018-7