
Abstract
Topology optimization (TopOpt) is a mathematical-driven design procedure to realize optimal material architectures. This procedure is often used to automate the design of devices involving flow through porous media, such as micro-fluidic devices. TopOpt offers material layouts that control the flow of fluids through porous materials, providing desired functionalities. Many prior studies in this application area have used Darcy equations for primal analysis and the minimum power theorem (MPT) to drive the optimization problem. But both these choices (Darcy equations and MPT) are restrictive and not valid for general working conditions of modern devices. Being simple and linear, Darcy equations are often used to model flow of fluids through porous media. However, two inherent assumptions of the Darcy model are: the viscosity of a fluid is a constant, and inertial effects are negligible. There is irrefutable experimental evidence that viscosity of a fluid, especially organic liquids, depends on the pressure. Given the typical small pore-sizes, inertial effects are dominant in micro-fluidic devices. Next, MPT is not a general principle and is not valid for (nonlinear) models that relax the assumptions of the Darcy model. This paper aims to overcome the mentioned deficiencies by presenting a general strategy for using TopOpt. First, we will consider nonlinear models that take into account the pressure-dependent viscosity and inertial effects, and study the effect of these nonlinearities on the optimal material layouts under TopOpt. Second, we will explore the rate of mechanical dissipation, valid even for nonlinear models, as an alternative for the objective function. Third, we will present analytical solutions of optimal designs for canonical problems; these solutions not only possess research and pedagogical values, but also facilitate verification of computer implementations.
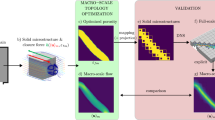
Graphical Abstract
We have considered a pressure-driven problem with axisymmetry and got optimal material layouts using topology optimization by maximizing the total rate of dissipation. The left figure shows unphysical finger-like design patterns when the primal analysis does not enforce explicitly the underlying radial symmetry. The right figure shows that one can avoid such numerical pathologies if the primal analysis invokes axisymmetry conditions.


















Similar content being viewed by others


Notes
For the Darcy or Darcy-Forchheimer model, p can be either absolute or relative pressure. But for the Barus model, p should be interpreted as the relative pressure with an appropriate selection of the reference pressure. See Eq. (2.3) and the discussion below it.
The corresponding design problem under maximization can be obtained by replacing argmin with argmax.
A kinematically admissible vector field is similar to a virtual displacement or a virtual velocity, which arise in the fields such as particle and rigid body dynamics as well as continuum mechanics. A virtual velocity, in continuum mechanics, satisfies the velocity boundary conditions and internal constraints (e.g., the incompressible constraint, similar to Eq. (2.1b)), but not the balance of linear momentum. For a more detailed exposure, see (Rosenberg 1977; Germain 1973).
Abbreviations
- TopOpt :
-
Topology optimization
- MPT :
-
Minimum power theorem
References
Alexandersen, J., Andreasen, C.S.: A review of topology optimisation for fluid-based problems. Fluids 5(1), 29 (2020). https://doi.org/10.3390/fluids5010029
Barus, C.: Isotherms, isopiestics and isometrics relative to viscosity. Am. J. Sci. 45, 87–96 (1893). https://doi.org/10.2475/ajs.s3-45.266.87
Bendsoe, M.P.: Optimization of Structural Topology, Shape, and Material. Springer Science & Business Media, New York (1995)
Bendsoe, M.P., Kikuchi, N.: Generating optimal topologies in structural design using a homogenization method. Comput. Methods Appl. Mech. Eng. 71(2), 197–224 (1988). https://doi.org/10.1016/0045-7825(88)90086-2
Bendsoe, M.P., Sigmund, O.: Topology Optimization: Theory, Methods, and Applications. Springer Science & Business Media, New York (2013)
Bertero, M., Boccacci, P.: Introduction to Inverse Problems in Imaging. CRC Press, Boca Raton (2020)
Borrvall, T., Petersson, J.: Topology optimization of fluids in Stokes flow. Int. J. Numer. Methods Fluids 41(1), 77–107 (2003). https://doi.org/10.1002/fld.426
Boyd, S., Boyd, S.P., Vandenberghe, L.: Convex optimization. Cambridge University Press, Cambridge (2004)
Bruns, T.E.: Topology optimization of convection-dominated, steady-state heat transfer problems. Int. J. Heat Mass Transf. 50(15–16), 2859–2873 (2007). https://doi.org/10.1016/j.ijheatmasstransfer.2007.01.039
Chang, J., Nakshatrala, K.B., Reddy, J.N.: Modification to Darcy-Forchheimer model due to pressure-dependent viscosity: consequences and numerical solutions. J. Porous Media (2017). https://doi.org/10.1615/jpormedia.v20.i3.60
COMSOL Multiphysics.: Comsol user’s Guide, Version 5.3. COMSOL AB, Stockholm, Sweden, (2018)
Convery, N., Gadegaard, N.: 30 years of Microfluidics. Micro Nano Eng. (2019). https://doi.org/10.1016/j.mne.2019.01.003
Dalbe, M.-J., Juanes, R.: Morphodynamics of fluid-fluid displacement in three-dimensional deformable granular media. Phys. Rev. Appl. (2018). https://doi.org/10.1103/physrevapplied.9.024028
De Boer, R.: Theory of Porous Media: Highlights in Historical Development and Current State. Springer Science & Business Media, New York (2012)
Dede, E.M., Joshi, S.N., Zhou, F.: Topology optimization, additive layer manufacturing, and experimental testing of an air-cooled heat sink. J. Mech. Des. (2015). https://doi.org/10.1115/1.4030989
Dühring, M.B., Jensen, J.S., Sigmund, O.: Acoustic design by topology optimization. J. Sound Vib. 317(3–5), 557–575 (2008). https://doi.org/10.1016/j.jsv.2008.03.042
Fujii, T.: PDMS-based microfluidic devices for biomedical applications. Microelectron. Eng. 61, 907–914 (2002). https://doi.org/10.1016/S0167-9317(02)00494-X
Germain, P.: The method of virtual power in continuum mechanics. Part 2: microstructure. SIAM J. Appl. Math. 25(3), 556–575 (1973)
Gersborg-Hansen, A., Sigmund, O., Haber, R.B.: Topology optimization of channel flow problems. Struct. Multidiscip. Optim. 30(3), 181–192 (2005). https://doi.org/10.1007/s00158-004-0508-7
Guest, J.K., Prévost, J.H.: Topology optimization of creeping fluid flows using a Darcy-Stokes finite element. Int. J. Numer. Methods Eng. 66(3), 461–484 (2006). https://doi.org/10.1002/nme.1560
James, K.A., Kennedy, G.J., Martins, J.R.: Concurrent aerostructural topology optimization of a wing box. Comput. Struct. 134, 1–17 (2014). https://doi.org/10.1016/j.compstruc.2013.12.007
Jang, G.W., van Dijk, N.P., van Keulen, F.: Topology optimization of mems considering etching uncertainties using the level-set method. Int. J. Numer. Methods Eng. 92(6), 571–588 (2012). https://doi.org/10.1002/nme.4354
Jensen, J.S., Sigmund, O.: Topology optimization for nano-photonics. Laser Photonics Rev. 5(2), 308–321 (2011). https://doi.org/10.1002/lpor.201000014
Kim, J., Tchelepi, H.A., Juanes, R.: Rigorous coupling of geomechanics and multiphase flow with strong capillarity. SPE J. 18(06), 1–123 (2013). https://doi.org/10.2118/141268-ms
Maute, K., Allen, M.: Conceptual design of aeroelastic structures by topology optimization. Struct. Multidiscip. Optim. 27(1–2), 27–42 (2004). https://doi.org/10.1007/s00158-003-0362-z
Maute, K., Frangopol, D.M.: Reliability-based design of MEMS mechanisms by topology optimization. Comput. Struct. 81(8–11), 813–824 (2003). https://doi.org/10.1016/s0045-7949(03)00008-7
Nakshatrala, K.B., Rajagopal, K.R.: A numerical study of fluids with pressure-dependent viscosity flowing through a rigid porous medium. Int. J. Numer. Methods Fluids 67(3), 342–368 (2011). https://doi.org/10.1002/fld.2358
Nakshatrala, P.B., Tortorelli, D.A., Nakshatrala, K.B.: Nonlinear structural design using multiscale topology optimization . Part I: static formulation. Comput. Methods Appl. Mech. Eng. 261, 167–176 (2013). https://doi.org/10.1016/j.cma.2012.12.018
Rajagopal, K.R.: On a hierarchy of approximate models for flows of incompressible fluids through porous solids. Math. Models Methods Appl. Sci. 17, 215–252 (2007). https://doi.org/10.1142/S0218202507001899
Rosenberg, R.: Analytical Dynamics. Plenum Press, New York (1977)
Rozvany, G.I.N.: Aims, scope, methods, history and unified terminology of computer-aided topology optimization in structural mechanics. Struct. Multidiscip. Optim. 21(2), 90–108 (2001). https://doi.org/10.1007/s001580050174
Rozvany, G.I.N., Lewiński, T.: Topology Optimization in Structural and Continuum Mechanics. Springer, New York (2014)
Shabouei, M., Nakshatrala, K.B.: Mechanics-based solution verification for porous media models. Commun. Comput. Phys. 20, 1127–1162 (2016). https://doi.org/10.4208/cicp.oa-2016-0007
Stone, H.A., Stroock, A.D., Ajdari, A.: Engineering flows in small devices: Microfluidics toward a lab-on-a-chip. Annu. Rev. Fluid Mech. 36, 381–411 (2004). https://doi.org/10.1146/annurev.fluid.36.050802.122124
Svanberg, K.: The method of moving asymptotes-a new method for structural optimization. Int. J. Numer. Methods Engi. 24(2), 359–373 (1987). https://doi.org/10.1002/nme.1620240207
Tarantola, A.: Inverse Problem Theory and Methods for Model Parameter Estimation. SIAM, Philadelphia (2005)
Vilardell, A.M., Takezawa, A., du Plessis, A., Takata, N., Krakhmalev, P., Kobashi, M., Yadroitsava, I., Yadroitsev, I.: Topology optimization and characterization of ti6al4v eli cellular lattice structures by laser powder bed fusion for biomedical applications. Mater. Sci. Eng. A (2019). https://doi.org/10.1016/j.msea.2019.138330
Whitesides, G.M.: The origins and the future of microfluidics. Nature 442(7101), 368–373 (2006). https://doi.org/10.1038/nature05058
Wiker, N., Klarbring, A., Borrvall, T.: Topology optimization of regions of Darcy and Stokes flow. Int. J. Numer. Methods Eng. 69(7), 1374–1404 (2007). https://doi.org/10.1002/nme.1811
Yang, R.J., Chahande, A.: Automotive applications of topology optimization. Struct. Optim. 9(3–4), 245–249 (1995). https://doi.org/10.1007/bf01743977
Zegard, T., Paulino, G.H.: Bridging topology optimization and additive manufacturing. Struct. Multidiscip. Optim. 53(1), 175–192 (2016). https://doi.org/10.1007/s00158-015-1274-4
Zhao, B., MacMinn, C.W., Primkulov, B.K., Chen, Y., Valocchi, A.J., Zhao, J., Kang, Q., Kelsey Bruning, J.E., McClure, C.T., Miller, A., Fakhari, D., Bolster, T., Hiller, M., Brinkmann, L., Cueto-Felgueroso, D.A., Cogswell, R., Verma, M., Prodanović, J., Maes, S., Geiger, M., Vassvik, A., Hansen, E., Segre, R., Holtzman, Z., Yang, C., Yuan, B. Chareyre., Juanes, R.: Comprehensive comparison of pore-scale models for multiphase flow in porous media. In: Proceedings of the National Academy of Sciences 116(28), 13799–13806 (2019). https://doi.org/10.1073/pnas.1901619116
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A. Mathematical Results
Appendix A. Mathematical Results
A function f(x) is said to be convex if
For twice-differentiable functions, a sufficient condition for convexity is (Boyd et al. 2004):
where a superscript prime denotes a derivative. Using this sufficient condition, it is easy to check the functions \(x^3\) and 1/x are convex on the positive real line (i.e., \(0< x < \infty\)).
Lemma A.1
Given that \(0 \le \gamma \le 1\) and \(0 < r_i\), the quantities \({\widehat{\xi }}_{\mathrm {3D}}^{(1)}\) and \({\widehat{\xi }}_{\mathrm {3D}}^{(2)}\) defined in Eqs. (7.17) and (7.22), respectively, satisfy
Proof
Noting that \(f(x) = x^3\) is a convex function on the positive real axis and \(\gamma \in [0,1]\), the definition of a convex function (A.1) implies the following:
This implies that
Using the fact that \(f(x) = 1/x\) is a convex function on the positive real line, we establish the following inequality:
By executing similar steps as above, we obtain the following inequality:
Adding the above two inequalities, we get the desired inequality:
\(\square\)
Rights and permissions
About this article

Cite this article
Phatak, T., Nakshatrala, K.B. On Optimal Designs Using Topology Optimization for Flow Through Porous Media Applications. Transp Porous Med 138, 401–441 (2021). https://doi.org/10.1007/s11242-021-01616-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11242-021-01616-z