
Abstract
A longstanding paradox was first reported by David Miller in 1975 and highlighted by Karl Popper in 1979. Miller showed that the ranking of predictions from two theories, in terms of closeness to observation, appears to be reversed when the problem is transformed into a different mathematical space. He concluded that “… no false theory can … be closer to the truth than is another theory”. This flies in the face of normal scientific practice and is thus paradoxical; it is named here the “Miller-Popper paradox”. This paper proposes a resolution of the paradox, through consideration of the inevitable errors and uncertainties in both observations and predictions. It is proved that, for linear transformations and Gaussian error distributions, the transformation between spaces creates no change in quantitative measures of “closeness-to-observation” when these measures are based in probability theory. The extension of this result to nonlinear transformations and to non-Gaussian error distributions is also discussed. These results demonstrate that concepts used in comparison of predictions with observations—concepts of “closeness”, “consistency”, “agreement”, “falsification”, etc.—all imply some knowledge of the uncertainty characteristics of both predictions and observations.



Similar content being viewed by others

References
Good, I. J. (1975). Comments on David Miller. Synthese, 30, 205–206. https://doi.org/10.1007/BF00485307
Miller, D. (2006). Out of error: Further essays on critical rationalism. Routledge. https://doi.org/10.4324/9781315247465
Miller, D. W. (1966). A paradox of information. British Journal for the Philosophy of Science, 17, 59–61.
Miller, D. W. (1975a). The accuracy of predictions. Synthese, 30, 159–191. https://doi.org/10.1007/BF00485304
Miller, D. W. (1975b). The accuracy of predictions: A reply. Synthese, 30, 207–219. https://doi.org/10.1007/BF00485308
Popper, K. R. (1979). Objective knowledge: An evolutionary approach (2nd ed.). Clarendon Press.
Popper, K., & Miller, D. (1983). A proof of the impossibility of inductive probability. Nature, 302, 687–688. https://doi.org/10.1038/302687a0
Acknowledgements
I am very grateful to Mr David Miller for his interest in this work and for pointing me to relevant literature. I thank Dr Antony Galton for his comments, encouragement and advice. I am also grateful to my former colleagues, Professor Andrew Lorenc and Dr Mark Webb (Met Office, UK), and to two anonymous reviewers for their very helpful comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The author declares that he has no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Nonlinear transformations
Appendix: Nonlinear transformations
When the two spaces are related in a nonlinear way, (3.1) becomes
where \(A\) and \(B\) are nonlinear matrix functions. We still assume, for this problem, that \({\mathbf{x}}\) and \({\mathbf{p}}\) have the same dimension.
Small departures from \({\mathbf{x}}\) and \({\mathbf{p}}\) are related by
where \({\mathbf{A}}\left( {\mathbf{p}} \right) = \nabla_{{\mathbf{p}}} A\left( {\mathbf{p}} \right)\), \({\mathbf{B}}\left( {\mathbf{x}} \right) = \nabla_{{\mathbf{x}}} B\left( {\mathbf{x}} \right)\) and \({\mathbf{B}}\left( {\mathbf{x}} \right) = {\mathbf{A}}\left( {\mathbf{p}} \right)^{ - 1}\). The relations in (A.2) become exact as \(\delta {\mathbf{x}} \to 0\) and \(\delta {\mathbf{p}} \to 0\).
Therefore (3.2) becomes
and (3.3) becomes
Then (3.10) becomes
and this also becomes exact in the linear limit and in the limit of small errors.
Consider the two examples of nonlinear transformations given by Miller (2006).
Example 1
Transformation from the length and breadth of a rectangle to its area and perimeter.
In this case, (2.1) (ii) becomes \({\text{p}} = {\text{xy}}\) and \({\text{q}} = 2\left( {{\text{x}} + {\text{y}}} \right)\).
Differentiation gives \({\mathbf{B}} = {\mathbf{A}}^{ - 1} = \left[ {\begin{array}{*{20}c} {\text{y}} & {\text{x}} \\ 2 & 2 \\ \end{array} } \right]\).
Then, if \({\mathbf{C}}_{x} = a^{2} \left[ {\begin{array}{*{20}c} 1 & 0 \\ 0 & 1 \\ \end{array} } \right]\), \({\mathbf{C}}_{p} = a^{2} \left[ {\begin{array}{*{20}c} {{\text{y}}^{2} + 4} & {{\text{xy}} + 4} \\ {{\text{xy}} + 4} & {{\text{x}}^{2} + 4} \\ \end{array} } \right].\)
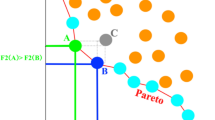
Therefore, for a circular \({\mathbf{C}}_{x}\), \({\mathbf{C}}_{p}\). has an elliptical shape for small uncertainties and becomes a distorted ellipse (oval) for large uncertainties. For the example given by Miller (a rectangle of 34 × 23), \({\mathbf{C}}_{p}\). is highly elliptical, and it also becomes singular when \({\text{x}} = {\text{y}}\). Moreover, the elliptical nature of \({\mathbf{C}}_{p}\) is such that the ellipse for the prediction that is closer to observion in \({\mathbf{x}}\)-space remains closer in \({\mathbf{p}}\)-space (similar to Fig. 2).
Example 2
Transformation from Cartesian to polar coordinates.
In this case (2.1) becomes
-
(i)
\({\text{x}} = {\text{p }}\cos {\text{q}}\) and y \(= {\text{p }}\sin {\text{q}}\),
-
(ii)
\({\text{p}} = \sqrt {{\text{x}}^{2} + {\text{y}}^{2} }\) and \({\text{q}} = \tan^{ - 1} ({\text{y}}/{\text{x}})\).
Differentiation gives \({\mathbf{A}} = \left[ {\begin{array}{*{20}c} {\cos {\text{q}}} & { - {\text{p }}\sin {\text{q}}} \\ {\sin {\text{q}}} & {{\text{p }}\cos {\text{q}}} \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} {{\text{x}}/{\text{p}}} & { - {\text{y}}} \\ {{\text{y}}/{\text{p}}} & {\text{x}} \\ \end{array} } \right],\)
and \({\mathbf{B}} = {\mathbf{A}}^{ - 1} = \frac{1}{{\text{p}}}\left[ {\begin{array}{*{20}c} {\text{x}} & {\text{y}} \\ { - {\text{y}}/{\text{p}}} & {{\text{x}}/{\text{p}}} \\ \end{array} } \right]\).
Then, if \({\mathbf{C}}_{x} = a^{2} \left[ {\begin{array}{*{20}c} 1 & 0 \\ 0 & 1 \\ \end{array} } \right]\), \({\mathbf{C}}_{p} = a^{2} \left[ {\begin{array}{*{20}c} 1 & 0 \\ 0 & {1/{\text{p}}} \\ \end{array} } \right]\).
Therefore, for a circular \({\mathbf{C}}_{x}\), \({\mathbf{C}}_{p}\) has an elliptical shape for small uncertainties and becomes a distorted ellipse (oval) for large uncertainties.
Note that, for a given value of \(({\text{y}}/{\text{x}})\), \({\text{q}} = \tan^{ - 1} ({\text{y}}/{\text{x}})\) can take values, \({\text{q}} + {\text{n}}{{\varvec{\uppi}}}\), where \({\text{n}}\) is any integer. This makes the transformation from \({\mathbf{x}}\)-space to \({\mathbf{p}}\)-space multi-valued. However, this ambiguity can easily be resolved when the computing the “closeness” between two points, by considering only values of \({\text{q}}\) with the least difference between them.
The transformation collapses at \({\text{p}} = 0\). Also, when \({\text{p}}\) is small (smaller than the uncertainty in \({\text{x}}\) and y), the ellipse of uncertainty in \({\mathbf{p}}\)-space distorts such that it no longer surrounds the point \({\mathbf{p}}\). This issue suggests that some transformations, whilst mathematically possible, are not physically realistic.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Eyre, J. Resolution of the Miller-Popper paradox. Synthese 203, 1 (2024). https://doi.org/10.1007/s11229-023-04425-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11229-023-04425-7