
Abstract
On-farm research (OFR) has become popular as a result of precision agriculture technology simplifying the process and farm software capabilities to summarize results collected through the technology. Different OFR designs exists with strip-trials being a simple approach to evaluate different treatments. Common in OFR is the use of yield monitors to collect crop performance data since yield represents a primary response variable in these type studies. The objective was to investigate the ability of grain yield monitoring technologies to accurately inform strip trials when frequent yield variability exists within an experimental unit. A combination of six sub-plot treatment resolutions (TR) that differed in length of imposed yield variation (7.6, 15.2, 30.5, 61.0, 121.9, and 243.8 m) were harvested at combine ground speeds of 3.2, 6.4, 7.2, and 8.1 kph, depending on study site (three study sites total). Intentional yield differences in maize (Zea mays L.) were created for each sub-plot by alternating the amount nitrogen (N) applied: 0 or 202 kg N/ha. Yield was measured by four commercially available yield monitoring (YM) technologies and a weigh wagon. Comparisons were made between the accumulated mass of the YM technology and weigh wagon through percent differences along with testing the significance of the plotted relationship between YM and weigh wagon. Results indicated that yield monitoring technology can be used to evaluate strip trial performance regardless of yield frequency and variability (error < 3%) within an experimental unit when operating within the calibrated range of the mass flow sensor. Operating outside of the calibrated range of the mass flow sensor resulted in > 15% error in estimating accumulated weight and overestimation of yield by 23%. Finally, no significant differences existed in estimating accumulated weight values between grain yield monitor technologies (all p-values ≥ 0.54).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
On-farm research (OFR) is used by farmers, researchers, and industry to evaluate different treatments such as novel inputs or management practices to cultivate crops. Though different OFR designs can be used, a common layout consists of full, long plots known as strip trials (Fig. 1). Strip trials represent one of the simplest layouts used in OFR, resulting in relatively easy interpretation and analysis (Lawes & Bramley, 2012). Traditionally, each strip is harvested independently then weighed in-field using a weigh wagon. Grain can also be transported off-site using a grain cart or truck to be weighed on certified scaled found at grain elevators. A yield estimate for each strip is then calculated using the accumulated mass of grain (adjusted to a common grain moisture content) and the harvested area (header width*strip length).

Illustration of a replicated strip-trial study layout within a field
Yield monitors have the potential to simplify strip trials by eliminating the need to weigh each individual strip separately with a weigh wagon. The use of yield monitors in strip trial research has become common and is especially valuable when a weigh wagon is not readily available. Yield monitor data can be used to inform OFR by accumulating yield estimates or mass for a specific load (i.e., individual strip) and comparing treatments for an on-farm trial (sometimes referred to as a test plot) (Banu, 2015). Al-Mahasneh and Colvin (2000) noted that the grain yield monitor used in their test had two data processing streams that are slightly different; one gives the individual weights (1 s interval weights) and the other gives the summary weights (total load weights). Therefore, using long strips as the experimental unit helps to account for possible yield monitor errors. Ketterings et al. (2012) and Al-Mahasneh and Colvin (2000) recommended strips “as long as possible” when characterizing yield with a grain yield monitor. Strip lengths can vary depending on the field size but prior field-scale, strip trials have used 53.3 m (Virk et al., 2019), 110 m (Poncet et al., 2018), 152.4 m (University of Missouri Extension, n.d.), and > 228.6 m (Canola Council, 2011) with all depending on a weigh wagon to estimate the mass of each strip or treatment. Long strip length can reduce the influence of field variability that may affect yield estimates. The locations of trials are traditionally assigned with the goal of having minimal variability and a homogenous strip. However, natural field variability can exist at different spatial resolutions and levels but many times this spatial variability can be unknown prior to the OFR trial being conducted. Limited information is available in prior literature if this frequency of natural field variability has an influence on the mass flow sensor readings and ultimately the accuracy of yield monitor technology to inform strip trials by allowing accurate yield comparisons between strips.
Grain yield monitors are either factory installed by the combine manufacturer or are retrofit from a third-party to be installed within the combine. Third-party platforms using a CAN (controller area network) sniffer are also common. A CAN sniffer platform, also referred to as a “puck”, processes data collected directly from the CAN bus communication network onboard the combine. The algorithm used to convert raw CAN data into yield estimates and how latitude/longitude positions are assigned to each yield point is typically proprietary information and unknown to the end user. Yield estimates can potentially vary between the CAN sniffer and the yield monitor due to the technologies using differing algorithms. However, all yield monitor technology relies on calibration of the mass flow sensor to enable accurate yield estimate calculations.
Mass flow rate is a key variable used when calculating a grain yield estimate. Impact style mass flow sensors are most common today but have a non-linear response as grain flow varies during harvest (Fig. 2). Mass flow sensor measurements are influenced by grain characteristics such as grain moisture and test weight, mechanical vibrations from the combine, uneven terrain (Fulton et al., 2009), as well as other machine, crop and field influencers Different crops or seed characteristics (i.e., size, shape) can also affect the mass flow measurements. Therefore, impact-style mass flow sensors require calibration over a range of flow rates for different crops and when physical characteristics (i.e. grain moisture and test weight) for a crop change significantly during harvest. For example, a calibration curve is needed for high moisture corn (> 20% moisture) and another calibration curve for drier corn of < 20% (Luck & Fulton, 2004). Mass flow sensors are the most popular method for on-the-go measurement of clean grain flow (kg/s) through in a combine. These sensors can be reliable for measuring clean grain flow but do require calibration to provide quality estimates.

Illustration of the non-linear response of impact style mass flow sensors and the use of two calibration approaches. A two-point calibration (A) were errors in mass flow measurements can occur compared to multi-point calibration (B) that used a range of grain flow rates (Luck & Fulton, 2004)
Grain yield monitor calibration includes varying grain flow rate through the combine and is accomplished by either changing ground speed or header cut width over multiple loads. The number of recommended loads for a multi-point calibration varies by manufacturer but typically ranges from 4 to 8 loads. Including too few calibration points can result in mass flow estimation errors. Figure 2A illustrates the potential for overestimation and increased errors when using only a two-point calibration (results in a linear calibration) compared to multiple points (Fig. 2B) that used several flow rates. Error is measured by comparing the accumulated weight from each load between the yield monitor and weigh wagon or scaled weight for the load. Most manufacturers recommend additional calibration loads if error exceed 3% between the yield monitor and weigh wagon or scaled weights (Deere & Company, 2012). This error is provided under the calibration menu within a yield monitor display, or the overall field weights from a yield monitor and the scaled weight of grain harvested are manually compared.
Although calibrating the mass flow sensor can be time consuming, it is necessary to achieve accurate yield estimates that can be used to inform OFR. Using a calibrated grain yield monitor to evaluate strip trial performance has become an alternative to using a weigh wagon to weigh individual loads. The goal of this work was on the ability of grain yield monitors to inform strip-trial OFR. The work does not investigate the minimum length that grain yield monitors can accurately detect yield differences between strips. The objectives were to:
-
1.
Investigate the ability of commercially available grain yield monitor technologies to accurately inform strip trials used in OFR.
-
2.
Determine if differences in estimating accumulated weight values (per experimental unit) exist between grain yield monitor technologies.
-
3.
Evaluate if frequent variability in yield within an experimental unit impacts the ability of grain yield monitor technologies and combine mass flow dynamics to accurately estimate accumulated weight for a strip trial.
Methodology
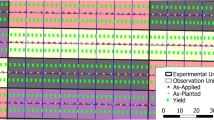
Three corn (Zea mays L.) fields at the Western Agricultural Research Station (WARS) in South Charleston, Ohio, USA were used in this study. Each field contained 304.8-m long strips (plots) as the main-plot experimental unit and consisted of 12 rows with 0.76-m row spacing. Intentional yield variability was established in this study to evaluate the impact unexpected or unknown yield variability within a strip could have on the accumulated weight values for a harvested strip. A variety of frequencies of yield variability were created by alternating nitrogen (N) application (0 or 202 kg N/ha of injected UAN (28-0-0)) at different treatment resolutions (TR) lengths (sub-plots) within each strip immediately prior to planting. All fields were set as randomized complete block designs with three replications. The layout was created in a geographic information system (GIS) and exported as a shapefile. This shapefile along with AB lines created within the in-cab display for the tractor equipped with real-time kinematic (RTK) GNSS was used for planting and nitrogen application. The nitrogen was applied a day prior to planting using a standard coulter-style side-dress unit setup for an application with of 7.6 m. This N application occurred perpendicular to the how the study site was planted with on–off actuation of the side-dress unit controlled manually by the driver from the tractor cab. In-season, RGB imagery captured with a drone and aerial flights to verify the study layout (Fig. 3).

Mid-season RGB image of Field 1 experimental layout that included seven treatment resolution (TR) lengths (sub-plots outlined in white) of alternating high (dark green) and low (light green) yields within the main plot experimental unit (red)
Field 1 consisted of seven TR lengths (3.8, 7.6, 15.2, 30.5, 61.0, 121.9, and 243.8 m; Fig. 3). Field 2 had an identical layout to Field 1 aside from the 3.8 m TR being omitted due to field size constraints. Field 3 had two TR lengths (15.2 m and 61.0 m of alternating yield zones) and two harvest speeds (3.2 kph and 6.4 kph) for each TR. Additional field information including planting date, hybrid, harvest date, and harvest speed(s) are summarized below for each field (Table 1).
Strips (main plots) within each field were independently harvested in the same direction. Unloading occurred at the end of each strip; there was no unloading performed while the combine was harvesting. The same manufacturer and model of a commercially available combine with an 8-row corn header was used in each field, though the exact unit and operator differed from 2020 to 2021. Accumulated weights were measured in each field by two commercially available yield monitoring technologies and a weigh wagon. After each pass of the combine, the accumulated mass for each strip (main plot) was measured using the weigh wagon. Sub-lot weights were not collected for this study. Additionally, the accumulated mass for individual strips within the yield monitors were manually recorded. Different loads were set up within the yield monitor technology to distinguish between strips (i.e., 101, 102, 103…). The use of loads within the in-cab display allowed each strip to be uniquely identified within the yield map file for use in the comparison analysis.
Accumulated weight in Field 1 was measured simultaneously by two grain yield monitors (YM1 and YM2) on one combine. YM1 was a third-party retrofit system of a mass flow sensor and in-cab display and was installed following respective manufacturer guidelines. YM2 was a factory installed yield monitor from the manufacturer. YM1 and YM2 used the same moisture sensor and GNSS receiver but different mass flow sensors. Fields 2 and 3 used a factory installed yield monitor system (YM3) plus a third-party platform (P1). P1 used a CAN bus sniffer to collect, save, and make calculations from the onboard CAN bus data. This CAN data was communicated wirelessly from the sniffer to an iPad mounted in the cab. The same sensors (GNSS receiver, mass flow sensor, and grain moisture sensor) were used to generate data for both YM3 and P1. YM3 and P1 each had separate processing algorithms to calculate yield estimates.
The mass flow sensors for YM1, YM2, and YM3 were calibrated per operator manuals prior to harvest. Calibration including mass flow and grain moisture was conducted in the same field within rows next to the study sites and prior to harvesting the study site. The mass flow rate was calibrated over a range of flow rates averaging 9.49–17.81 kg/s by harvesting at different ground speeds (4.8 kph, 6.4 kph, 8.1 kph, and 9.7 kph). Calibration was conducted anticipating harvesting Field 2 with flow rates associated with 8.1 kph and Field 3 at 4.8 kph and 9.7 kph. Actual harvest speeds were adjusted to 7.2 kph for Field 2 and 3.2 kph and 6.4 kph for Field 3 (Table 1) to ensure constant ground speed for an individual plot due to field harvest conditions. The average flow rate for plots harvested at 3.2 kph was 7.4 kg/s. Grain moisture ranged between 19.7 and 22.0% for Field 1, 16.4–17.8% for Field 2, and 15.9% and 17.6% for Field 3 during calibration and harvesting of the study sites based on collecting samples and measuring using a certified Dickey-John grain moisture analyzer (GAC 2100). These samples represented an average for an entire pass (main plot). No post-harvest calibrations were performed to adjust accumulated weights for this study.
The yield map data was first uploaded, and maps reviewed using Ag Leader SMS Advanced (v. 21.5; Ames, Iowa USA) software. After harvesting Field 3, it was discovered that the resulting clean grain flow (kg/s) for the 3.2 kph harvest ground speed was outside of the clean grain flow range used to calibrate the yield monitor. Consequently, the 3.2 kph data from Field 3 was identified as uncalibrated within the yield map with the remaining data marked as calibrated. The remaining data listed as uncalibrated was from P1 since results indicated the large errors seen were most likely from the CAN bus sniffer using raw data that did not have calibrations and settings applied. Thereby, the final data set was separated into calibrated and uncalibrated data for the yield monitor maps within SMS Advanced with each Load (representing a strip or main-plot) already labeled by treatment (101, 102. 103, etc.) and uncalibrated or calibrated data. The weigh wagon main-plot data served as the control treatments for comparisons to the yield map data.
The yield map data was then used to calculate the accumulated mass for each strip. This step was completed by exporting the yield maps from SMS Advanced as a database file (.dfb) that was then opened and saved as a Microsoft Excel file. With the yield map data labeled by treatment, the yield map points within a main-plot were summed to compute the accumulated mass for individual passes. This data was then merged with the weigh wagon accumulated mass per pass for comparisons.
Analysis included calculating the percent differences between the yield map accumulated mass and the weigh wagon estimates for each main plot area using Eqs. 1 and 2. The relative difference equation takes into consideration overestimation and underestimation ( ±) of accumulated weight between the yield map data and the weigh wagon. By taking averages across plots or for a field, overestimated (positive) and underestimated (negative) values can average to where the actual difference appears minimal. The absolute difference (Eq. 2) was used to evaluate the maximum variability that could occur in accumulated weight estimates by calculating the average of the absolute values of the deviations. For example, if the yield monitoring technology underestimated one plot by 3% but overestimated another by 3%, the relative average difference would be 0% ((− 3% + 3%)/2) with the absolute difference equal to 3% ((3% + 3%)/2).
SAS v9.4 (English) was used for all statistical analyses. The PROC REG procedure was used to determine the linear relationship (with y-intercept = 0) and significance between the accumulated weight values estimated by the yield monitoring technology and weigh wagon. A two-tailed t-test (alpha = 0.05) was performed to evaluate differences in estimating accumulated weight between yield monitoring technologies within the same field. Plots were generated in Microsoft Excel comparing the accumulated weights of the yield map data to the weigh wagon weights. The resulting linear fit equation and R2 along with a 1:1 line was also included in the plots Comparisons were also conducted using the PROC GLM and LSMEANS procedures at an alpha = 0.05. Absolute error averages were calculated and used to assess differences between the calibrated and uncalibrated data sets for the TR lengths.
Results and discussion
The 2020 and 2021 temperatures for June–September were within 1C of the 30-year average. Precipitation in 2020 was below average by 40–65% except for August where precipitation was similar to the long-term average. In 2021, precipitation was 20% greater in July and August than the long-term average, with June and September being 10–20% below average. Field 1 was harvested under ideal field conditions but Fields 2 and 3 were harvested late due to wet field conditions through November. In terms of grain moisture, the individual grain samples collected for each main-plot ranged between 19.7 and 22.0% for Field 1, 16.4–17.8% for Field 2, and 15.9% and 17.6% for Field 3 during calibration and harvesting of the study sites. The yield map data indicated the grain moisture ranged between 19.2 and 25.3% with an average of 21.1% for Field 1. Grain moisture based on the yield maps for Field 2 ranged between 16.0 and 19.9% with an average of 17.3% and Field 3 results ranged from 16.2 to 19.8% with an average of 17.2%. Average test weight for the low and high yields varied across fields. The average test weights from the high and low yield TR for Field 1 were 72 and 71 kg/hL, 75 and 70 for Field 2, and 75 and 78 kg/hL in Field 3, respectively. Test weight means were calculated considering all yield TR without removing outliers or possible measurement errors. Although the impact of test weight was not evaluated in this study, test weight variations could have impacted yield estimates from the yield monitoring technology since a constant test weight is used for yield calculations.
The overall relative and absolute percent differences for each field and yield monitoring technology were summarized in Table 3. Recall common acceptable error between yield monitor technology and the weigh wagon should not exceed 3% (Luck & Fulton, 2004; Deere & Company, 2012). YM1 and YM2 in Field 2 both had acceptable relative and absolute differences. YM3 had acceptable differences in Field 2 but not in Field 3; differences increased for P1 from Field 2 to Field 3 and most exceeded 3%. The increase in differences between Fields 2 and 3 from YM3 suggested a calibration or other issue in Field 3. Across all fields, the differences for both YM3 and P1 were outside the acceptable threshold of 3%. Further, Table 2 highlights that yield monitor technology can perform well on a field-scale average, but calibration or other factors could influence percent differences and may change by field. Measuring average field-scale differences was done to represent if an operator was unaware of spatial field variability or if harvest occurred outside of the calibrated region of the mass flow sensor. A user would know the total amount of grain harvested per study or field but would not be aware of possible sources of errors across strips if not weighing and recording each strip.
Figure 4 presents a comparison between yield monitor technology and weigh wagon accumulated weights using each strip per field. Data from Field 1 and Field 2—YM3 were closely distributed around the 1:1 line. Data from P1 were more widely dispersed compared to YM1, YM2, and YM3 overall. Field 3 data were clustered by harvest speed in addition to yield monitoring technology. P1 overestimated the accumulated weight by an average of 347 kg and YM3 overestimated by an average of 319 kg compared to the weigh wagon data for plots harvested at 3.2 kph. Comparatively, average overestimation at 6.4 kph was reduced to 48 kg and 7 kg for P1 and YM3, respectively.

Accumulated weights from each yield monitor and platform plotted against the weight reported from the weigh wagon for a third-party retrofit yield monitor (YM1), two commercially installed yield monitors (YM2, YM3), and one third-party platform (P1). The solid black line represents the 1:1 line
The 3.2 kph ground speed and yield level in Field 3 produced a nominal clean grain flow through the combine within a plot of 7.35 kg/s. This flow was lower than the slowest ground speed and yield level during calibration (9.49 kg/s). Initial calibration occurred with the anticipation of harvesting Field 3 at a higher speed and expected flow rate. High errors, including overestimation, can occur when operating outside of the calibrated region of the mass flow sensor and could account for the errors in Field 3—3.2 kph being larger than the other datasets. These results demonstrated how errors can occur even when following the recommended calibration manuals. Users must calibrate over a range of flow rates, even for flow rates that may not be expected in the field, to ensure accurate mass flow is measured.
Even when the mass flow sensor operated within the calibrated flow range, P1 generated higher differences compared to YM3 for all plots. While the procedures used by P1 to convert CAN bus data into yield estimates are not disclosed, one explanation could be that some or all the data from the sensors was directly output not utilizing the calibrated data (i.e., the mass flow sensor calibration and other user settings were not applied to this data set prior to being output). As a result, P1 data from Fields 2 and 3 were categorized as “uncalibrated.” The data from Field 3—3.2 kph collected by YM3 was also grouped in the “uncalibrated” category since harvest occurred outside of the calibrated flow rate of the mass flow sensor. YM1, YM2, and the remaining YM3 data (Field 2 and Field 3—6.4 kph) were sorted as “calibrated” because all operated within the calibrated range of the mass flow sensor and calculated accumulated weight (and yield estimates) using settings applied by the user.
Data from Field 1 (YM 1 and YM 2), Field 2—YM3, and Field 3—YM3—6.4 kph had calibrations/user settings applied and operated within the calibrated mass flow range of the mass flow sensor. Figure 5 presents all data points closely dispersed around the 1:1 line. Additionally, a strong linear relationship existed between all the yield monitoring technologies and weigh wagon (R2 ≈ 1) in the calibrated data set. Nelson et al. (2015) found a similar relationship (R2 = 0.99) when weigh wagon grain weight was compared with yield monitor plot weight over multiple environments. In this study, all regression models in the calibrated dataset were significant.

Accumulated weight comparison between data from calibrated sources and the weigh wagon from all 3 fields. YM1 was a third-party retrofit yield monitor, YM2 and YM3 were factory installed, and P1 was a third-party platform. The solid black line represents the 1:1 line. All regression models were highly significant (p < 0.001)
The uncalibrated datasets were compared in Fig. 6. High dispersion existed in all P1 data and for YM3 when the mass flow sensor operated outside of the calibrated range (3.2 kph ground speed). Although the linear relationship was significant between the P1 and WW data in Field 2 (p < 0.001), the P1 data had high dispersion and was not close to the 1:1 line. Less data points were included in the Field 3 analysis due to separating by harvest speed but all regression models in the uncalibrated dataset were highly significant (p < 0.0001). The slope of the trendlines for the Field 3 data at 3.2 kph were both greater than one, which indicated overestimation of the P1 and YM3 data compared to actual weights. Though, there was a strong linear relationship present for all data (all R2 > 0.99). Field 3 data were linear but was fixed higher from the 1:1 line (overestimated).

Accumulated weight comparison between data from uncalibrated sources and the weigh wagon. P1 was a third -party CAN sniffer and YM3 was a factory installed yield monitor. The solid black line represents the 1:1 line. All regression models were highly significant (p < 0.001)
For YM3, the estimated grain mass flow rate was around 7.35 kg/s for a ground speed of 3.2 kph. Using the wet weight measurements from the weigh wagon over the 304.8 m strip length, mass flow was calculated to be 5.94 kg/s when harvested at 3.2 kph. This result highlighted that the grain mass flow estimated by the mass flow sensor at the 3.2 kph speed was on average 23% higher (7.35 versus 5.94 kg/s). This high error in the mass flow measurement by the sensor was mainly due to operating outside the calibration range since it was not calibrated for a flow rate under 9.49 kg/s. Reinke et al. (2011) indicated the mass flow sensor and proper calibration have the largest impact on yield monitor accuracy. Mass flow rate was similarly overestimated for P1 for the 3.2 kph plots since the data from P1 was not processed using an in-cab display or associated with its own yield monitor/mass flow sensor, it relied on the calibration of the same mass flow sensor as YM3.
Absolute percent differences for all three fields and data sets were reported in Table 3 by TR length. Differences in the calibrated datasets were low and all under the acceptable 3% limit. Average absolute difference for calibrated YMs across treatment lengths did not exceed 1.7%. However, the absolute differences were significantly higher for the uncalibrated data versus the calibrated dataset (p = 0.0005). The largest average absolute percent difference occurred at 3.2 kph for both YM3 and P1 (15.8% and 17.2%, respectively) while the minimum absolute differences were double compared to the averages for the calibrated data (Table 3). The high differences for yield estimates collected outside the calibration range of the mass flow sensor underscored the importance of calibrating mass flow sensors over a range of flow rates to maintain needed data accuracy for making treatment comparisons.
Only the yield monitor data from Field 3, at 3.2 kph, was significantly different for estimating accumulated weight as compared to the weigh wagon (Table 4). This difference was due to both YM3 and P1 being different from the WW data (p < 0.0001) but not from one another (p = 0.57). The remaining data, including Field 3 harvested at 6.4 kph, produced non-significant results compared to the weigh wagon and whencomparing YM’s within a field or harvest speed (Table 4).
The absolute percent differences at each treatment length in Table 3 were used to evaluate the impact that variable yield frequency within a plot had on yield monitor technology to accurately inform a strip trial. Differences within the calibrated datasets were always under 3% regardless of treatment length. Differences were larger in the uncalibrated data but not due to TR lengths. The frequency of yield variation within an individual plot did not impact the accuracy of the yield monitor technology to report accumulated weight (p = 0.21). This result does not characterize the ability of the yield monitor to discern what the magnitude of change was within the plot, but only the ability to produce an accurate main plot average.
Finally, results from this study emphasized being cautious when using a third-party platform to collected yield data for on-farm strip trials. There exists uncertainty of how the platform calculated yield or other data within the yield map. However, some software and yield monito technology allow post-harvest calibration of yield map data but that was addressed in this study. Variations in yield estimate calculation algorithms exist between yield monitor manufacturers and CAN bus sniffers. Using data recorded by the in-cab display or from a retrofitted yield monitor system operating within the appropriate calibration range appeared to provide more accurate weight estimates than a third-party platform. The absolute differences from P1 exceeded 3% in all instances has been noted as the maximum error allowed in literature and operator manuals (Luck & Fulton, 2004; Deere & Company, 2012). Utilizing data with differences exceeding 3% due to operating outside of the calibrated region of the mass flow sensor or from a platform that has limited or no calibration capabilities for yield data collection can result in conclusions that misrepresent true field conditions.
Conclusions
The following conclusions were drawn from this research:
-
1.
Grain yield monitors can be used to accurately inform strip trials used in OFR when operating within the calibration range of the mass flow sensor (< 3% average absolute difference). Operating outside of the calibration region of the mass flow sensor produced average differences ranging over 15%. Using a third-party CAN sniffer (without post-harvest calibrations applied) resulted in differences over 5%.
-
2.
No differences existed in estimating accumulated weight values per main plot between grain yield monitor technologies (all p-values ≥ 0.54) within fields and for the harvest speeds.
-
3.
The frequency of yield variation within a strip did not impact the accuracy of the yield monitor technology to quantify main plot yield to inform strip trial results (p = 0.21).
Data Availability
Not applicable.
References
Al-Mahasneh, M. A., & Colvin, T. S. (2000). Verification of yield monitor performance for on-the-go measurement of yield with an in-board electronic scale. Transactions of the ASABE, 43(4), 801–807.
Banu, S. (2015). Precision agriculture: Tomorrow’s technology for today’s farmer. Journal of Food Processing & Technology, 6(8), 468–473. https://doi.org/10.4172/2157-7110.1000468
Canola Council. (2011). On-farm strip trials—Tips. Retrieved February, 2022, from www.canolacouncil.org/canola-watch/2011/04/25/tips-for-on-farm-strip-trials
Deere & Company. (2012). S-series combine calibration guide. Retrieved April, 2022, from www.sloans.com/wp-content/uploads/2013/12/S-Series-Calibration-Guide3.pdf
Fulton, J. P., Sobolik, C. J., Shearer, S. A., Higgins, S. F., & Burks, T. F. (2009). Grain yield monitor flow sensor accuracy for simulated varying field slopes. Applied Engineering in Agriculture., 25(1), 15–21.
Ketterings, Q., Czymmek, K., & Gabriel, A. (2012). On-Farm Research. Cornell University Cooperative Extension. Retrieved January, 2022, from http://nmsp.cals.cornell.edu/publications/factsheets/factsheet68.pdf
Lawes, R. A., & Bramley, R. G. V. (2012). A simple method for the analysis of on-farm strip trials. Agronomy Journal, 104(2), 371–377. https://doi.org/10.2134/agronj2011.0155
Luck, J. D. & Fulton, J. P. (2004). Best management practices for collecting accurate yield data and avoiding errors during harvest. University of Nebraska Lincoln Extension. Retrieved February, 2022, from http://extensionpublications.unl.edu/assets/pdf/ec2004.pdf
Nelson, B. P., Elmore, R. W., & Lenssen, A. W. (2015). Comparing yield monitors with weigh wagons for on-farm corn hybrid evaluation. Agronomy & horticulture—Faculty Publications, University of Nebraska-Lincoln, Lincoln. Retrieved June, 2022, from http://digitalcommons.unl.edu/agronomyfacpub/841
Poncet, A. M., Fulton, J. P., McDonald, T. P., Knappenberger, T., Shaw, J. N., & Bridges, R. (2018). Effect of heterogenous field conditions on corn seeding depth accuracy and uniformity. Applied Engineering in Agriculture, 34(5), 819–830. https://doi.org/10.13031/aea.12238
Reinke, R., Dankowicz, H., & Phelan, J. (2011). A dynamic grain flow model for a mass flow yield sensor on a combine. Precision Agriculture, 12(5), 732–749. https://doi.org/10.1007/s11119-010-9215-0
University of Missouri Extension. (n.d.) What is a strip trial? University of Missouri Extension. Retrieved June, 2022, from https://extension.missouri.edu/programs/strip-trial-program/strip-trial-expectations
Virk, S. S., Porter, W. M., Fulton, J. P., & Pate, G. L. (2019). Field validation of seed meter performance at varying seeding rates and ground speeds. Applied Engineering in Agriculture, 35(6), 937–948. https://doi.org/10.13031/aea.13132
Acknowledgements
The authors would like to thank Andrew Klopfenstein and Ryan Tietje for their help with harvest logistics and operating the grain combines. Thanks also to the entire crew at WARS in particular station supervisor, Joe Davlin, along with Cori Lee and Ryanna Tietje from the Ohio State Digital Agriculture Team. Partial finding for this project was provide by AGCO, the Ohio Agricultural Research & Development Center, the Ohio State University CFAES Soybean Center, and the Joehlin Award in Agricultural Engineering. Mention of trade names and commercial products is for information purposes only and does not imply endorsement by The Ohio State University.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Informed consent
The authors have read and understand the informed consent provided by the Journal.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Gauci, A.A., Fulton, J.P., Lindsey, A. et al. Precision of grain yield monitors for use in on-farm research strip trials. Precision Agric 25, 771–784 (2024). https://doi.org/10.1007/s11119-023-10092-y
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11119-023-10092-y