
Abstract
Transport demand models were initially designed for simulating car trips. Nowadays researchers and planners are considering pedestrian travel and its health and safety impacts in the regional transport models. However, the existing transport models lack the knowledge and experience in pedestrian modeling for health assessment. This paper contributes to the modeling practice by developing an integrated model called the MITO/MoPeD. The model builds upon previous model development and integrates the fine-grained pedestrian modeling tool into the agent-based transport model. The MITO/MoPeD model is applied to the Munich metropolitan area. Model performances are analyzed based on travel measures (e.g., walk share, trip length distribution, and pedestrian flow) and physical activity volumes. Results show that the MITO/MoPeD model can better represent pedestrian travel behavior than the existing Munich Model. It performed better in simulating the spatial distribution of walk shares and the distribution of walk trip lengths. Moreover, it overcomes the issue of overestimating physical activity volumes. These findings suggest that the MITO/MoPeD model can deliver more precise travel outcomes. More importantly, it is valuable for addressing pedestrian planning issues such as transportation infrastructure investments, land use planning, assessment of safety and health outcomes, and evaluation of environmental impacts.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
In the past several years, there is a growing need to shape sustainable urban mobility, including improvements to the quality of the walking environment, developing supportive land use patterns, and other investments to promote pedestrian travel. Walking, as a low/no-tech mobility, is the most traditional mode that we experience every day. Developing sustainable urban systems that encourage walking over private car use could reduce energy usage and environmental issues such as air and noise pollution caused by motorized transport. Moreover, it can improve overall public health through reductions in diseases related to obesity and cardiovascular conditions. After experiencing the lockdown from the global pandemic, the importance of walking as a part of future mobility has become more significant. Therefore, it is no surprise that cities tend to put pedestrians at the forefront of future mobility policies. However, planners and policymakers often lack appropriate tools to address pedestrian planning questions and assess the impacts of their policies on meeting their sustainable goals. To achieve a higher share of walking and more sustainable urban transport use, there is a need for better planning tools that are sensitive to pedestrian needs.
Agent-based transport models can be useful to help researchers and planners simulate pedestrian demand and understand the health impacts of pedestrian travel. By simulating at the individual level, these models can help researchers identify transport issues at a fine resolution. The outcomes could be used to calculate individual’s units of physical activity (metabolic equivalents, METs) that are critical inputs to health impact assessment models.
However, transport models were primarily designed to simulate car traffic, with the aim of forecasting road congestion. These models have a limited understanding of pedestrian behavior. In the existing operational agent-based transport models, walk mode is usually omitted or combined with cycling as one non-motorized mode (Waddell 2002). Moreover, the majority of the transport models is applied with coarse zone systems (e.g., block group, Traffic analysis zones—TAZ). This is sufficient for understanding car demand on transport infrastructure. However, walk trips are usually too short to be neglected or be considered as same-length intrazonal trips in the car-oriented transport models. To simulate pedestrian demand in an agent-based transport model, it is important to apply a fine-grained zone system. Another limitation is the poor understanding of important factors that influence pedestrian travel. Previous studies have shown a significant influence of built environment factors on walking behavior (Gehrke and Clifton 2014; Gehrke annd Clifton 2017), such as activity density, the existence of parks, and the slopes. Those factors, that might be left out in the traditional car-oriented transport models, are now necessary to be considered for better representing pedestrian travel.
To overcome these limitations, this paper proposes an integrated modeling framework (referred to as MITO/MoPeD) that incorporates a fine-grained resolution model of pedestrian demand (MoPeD) into a sparser spatial resolution of an agent-based transport model (hereafter referred to as the Munich Model). Specifically, the paper attempts to answer the questions:
-
Can the integrated modeling framework (MITO/MoPeD) better represent pedestrian travel behavior than the Munich Model, and
-
Can it evaluate physical activity volumes more accurately?
The central hypothesis is that the Munich Model would not be suitable for pedestrian modeling and health impact assessment, but the following adaptations from MoPeD could improve their accuracy:
-
1.
Separate walk trip decisions from the multimodal models.
-
2.
Apply a finer zone system for walk trip decisions.
-
3.
Apply more built environment factors for walk trip decisions.
To check the plausibility, the Munich model and the MITO/MoPeD model are applied to the Munich study area. Model performances are tested based upon the prediction of walk shares, walk trip length distribution, spatial distribution of walk trips, and physical activity volumes.
The organization of the paper is as follows. “Literature review” Section reviews research on pedestrian modeling and its representation in the agent-based transport models, after which “Methodology” Section presents the concepts of MoPeD and MITO and the methodology of integrating these two models. Travel demand results and model plausibility analyses are discussed in “Results and Discussion” Section. Finally, a summary of the main findings and conclusions are provided in “Conclusions” Section.
Literature review
Early attempts to model pedestrian travel were hampered by a lack of pedestrian data and commensurate information about the built environment at appropriate scales. Thanks to the improvement of travel survey data and data collection technologies, pedestrian research has advanced over the last 2 decades.
First, a number of studies on the relationship between pedestrian behavior and built environment has recently been carried out. These studies identified the various built environment factors, which impact pedestrian behavior. It was proven many times that walking behavior (e.g., walking frequency and distance) is strongly related to intersection density, number of destinations within walking distance, and population density (Ewing and Cervero 2010; Khan et al. 2014; Kuzmyak et al. 2014).
Second, progress has been made in simulating pedestrian travel behavior through agent-based models (ABM). ABM is a powerful modeling technique for simulating the decision-making and interactions of autonomous agents (Bonabeau 2002). Some of these efforts take a simulation approach and model individual microscopic pedestrian movements through space (e.g., public streets and plazas, airports, shopping malls) with an interest in wayfinding, evacuation, response to crowding and queuing (Borrmann et al. 2012; Erdmann and Krajzewicz 2015; Kielar and Borrmann 2016). While also focusing on individual pedestrian behaviors, other models provide estimates of the amount and nature of pedestrian activity in an urban area with an aim of guiding land use and transportation planning decisions (Antonini et al. 2006; Schneider et al. 2009; Schnittger and Zumkeller 2004). This paper focuses on the development of the latter type of ABM, which models individual’s travel demand at an urban scale.
Although the research on pedestrian travel behavior has lots of key findings, there is still insufficient work on pedestrian modeling practices, especially at a regional level. The regional transport planning tools were originally oriented towards automobile travel. Non-motorized modes were first incorporated into regional transport models in the early 1990s (Liu et al. 2012). After that, many Metropolitan Planning Organizations (MPO) made progress in their regional models for pedestrian travel.
The DVRPC Regional Travel Demand Model is applied in the Philadelphia area (Delaware Valley Regional Planning Commission 2011). In the DVRPC model, the non-motorized trip rates are directly modeled in the trip generation stage for three purposes. They are stored as zonal results and are dropped off in the distribution and assignment stage. The trip generation models for non-motorized trips include TAZ-level attributes such as the number of households, group quarters population (such as nursing homes, military barracks and college/university student housing), basic employment, and retail employment.
In the San Francisco County Model (SF-CHAMP), walk and bike trips are modeled separately in mode choice models (San Francisco County Transportation Authority 2002). Pedestrian environment factors such as network continuity, ease of street crossing, perception of safety, and topological barriers are considered in mode choice. The route choice model is applied to cyclists but not to pedestrians. Trip purposes are categorized into work, education, and others.
mobiTopp was developed and applied in the German context (Schnittger and Zumkeller 2004). The model simulates activities over a week. Walk and bike tours/trips are modeled separately for eight personal purposes including shopping and leisure. Mode choice is modeled after destination choice. There are no pedestrian environment factors included in mode choice models.
Portland Metro Model has enhanced non-motorized travel forecasting by incorporating walk and bike modes in the mode choice model (Portland METRO 2020). Walk and bike choices are made by these TAZ variables: number of local intersections, households, and total/retail employment. In addition, recreation trips are modeled, which comprise a significant number of pedestrian and bicycle trips.
A comprehensive report of regional models is conducted by Singleton et al. (2018). Among the 48 MPOs in the US, non-motorized trips are still excluded in 12 MPO models. The rest of the MPO models include walking and cycling separately or only as a combined non-motorized mode in mode choice. Although the shift to sustainable transport has created increasing interest in modeling pedestrian travel, there remain improvements that can better represent pedestrian behavior and evaluate health impacts more accurately. They conclude that the perspectives of the research on pedestrian modeling are (1) traditional pedestrian models with finer spatial resolution and (2) disaggregated models like agent-based and activity-based models.
A recent study by Clifton et al. (2016b) establishes a traditional four-step model of pedestrian demand with fine spatial resolution. It measures the built environment and implements the model at a finer-grained scale—Pedestrian Analysis Zone (PAZ), which is a grid cell of 80 m. It is a much finer scale than the TAZs used for modeling pedestrians in other travel demand models. It can better represent the walking behavior and estimate number of walk trips more accurately. However, it meets challenges in model complexity, data collection, and computational burden in running such a finer scale. Besides that, MoPeD is an aggregate model that simulates the pedestrian trips at the zonal level. It is sufficient to find out where the walk trips occur and which districts or neighborhoods are more walkable, but it cannot answer the questions of who generates more walk trips and who travels more kilometers by foot. This individual-level information is crucial for assessing health impacts.
In general, research and practice have well-developed for both pedestrian modeling and agent-based transport model. However, there is a lack of experience in integrating the advanced pedestrian modeling framework into the agent-based transport models.
Methodology
Agent-based transport model
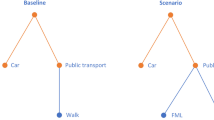
Agent-based transport models are well-developed in the past decades. In this study, the Munich Model is adapted to the need for pedestrian modeling. The Munich Model is a model suite with three modules, including the synthetic population (Moreno and Moeckel 2018), the travel demand model—MITO (Moeckel et al. 2020), and the transportation simulation—MATSim (Horni et al. 2016). The synthetic population provides a list of households and persons with sociodemographic attributes, as well as work and school locations. This information is then fed into MITO. MITO is a microscopic travel demand model that generates trips for every individual, which are then passed on to MATSim for trip assignment. In MITO, the multinomial logit mode choice model estimates share of walk trips but subsequently drops those trips from further analysis (as shown in Fig. 1). Most agent/activity-based models fall within this framework (Singleton et al. 2018). At this point, it is impossible to analyze the impact of the built environment on walking or the health benefits for travelers choosing non-motorized modes. The Munich Model uses 4953 gradually-sized zones as its spatial unit (Molloy and Moeckel 2017) which were designed to capture vehicle trips rather than relatively short walking trips. These short trips in MITO were usually considered as same length intrazonal trips. The length of intrazonal trips is half of the average distance to the 3 nearest neighboring zones (Okrah 2016).

Pedestrian modeling framework used in the Munich Model (adapted from Singleton et al. 2018)
Pedestrian modeling framework: MoPeD
MoPeD provides the pedestrian modeling framework in this work. MoPeD was initially developed by Clifton et al. (2015, 2016a, 2016b, 2019) and then further enhanced by Zhang et al. (2021). The previous work on MoPeD showed that this tool is sensitive to the small-scale variations in local land use and transport development, and it is capable to assess the planning policies on a regional scale (Zhang et al. 2021).
MoPeD is an aggregated trip-based urban travel demand model for pedestrian travel. The modeling process is shown in Fig. 2. It follows the traditional four-step model, but it changes the spatial unit from transportation analysis zones (TAZs) to a finer-grained scale called pedestrian analysis zone (PAZ), which can better represent pedestrian behavior. The size of PAZ varies in different study areas. In the Portland model development and application, it is defined as 80 × 80 m grid cells. Also, mode choice between walk and non-walk trips is done before destination choice, which has improved the trip length frequency distribution of walk trips.

Modeling framework of MoPeD
MoPeD employs binary logit models to estimate the probability of choosing to walk. The models include three household attributes (income category, number of vehicles, and children) and pedestrian accessibility as independent variables. The pedestrian accessibility variable does not only represent the activity density but also the network connectivity between PAZs. Pedestrian accessibility was transformed to log-form, which leads to a better model fit. It shows a significant and positive impact in the model, which indicates that households living in denser neighborhoods with better street networks tend to be more likely to walk. The log-transformation suggests that differences in pedestrian accessibility matter a lot at the lower end of accessibilities. Once a certain level of pedestrian accessibility has been reached, additional growth in accessibility has less impact on the likelihood to walk.
In the two-stage destination choice process, walk trips in MoPeD first select the destination SuperPAZ, which are aggregations of PAZs into 400 m grid cells (Zhang et al. 2019), then choose the constituent PAZ. We estimated multinomial logit pedestrian destination choice models for both SuperPAZs and PAZs. Destination choice models were specified using measures of impedance, pedestrian road density in kilometers, logged size terms, pedestrian trip supports (like the existence of parks) and barriers (e.g., the proportion of industrial jobs and slope), and traveler characteristics. Distance was a significant and sensitive factor in the model. Retail and service employment was a strong attractor while the share of industrial jobs has a barrier impact on choosing a destination. If it is necessary to cross the motorway to reach the destination, then the destination zone becomes less attractive.
Model integration of MITO and MoPeD
Figure 3 shows the working process of the MITO/MoPeD model. First, MITO provides trip generation at the individual level to MoPeD. In the MoPeD module, walk trips are generated and processed, and then fed back to MITO.

The framework of the integrated modeling framework—the MITO/MoPeD model
The incorporation of MoPeD and the Munich Model is not trivial. MoPeD is carried out with a fine-grained resolution, whereas the Munich Model uses a much sparser TAZ as its spatial unit. The difference in spatial resolution should be adapted. In addition, the walk trip decision sequences are not aligned in MITO and MoPeD. As shown in Fig. 1, individuals in MITO first choose the trip destination and then the trip mode, while in MoPeD individuals choose to walk or not first, then select a destination if they walk. A hybrid decision process needs to be defined in the MITO/MoPeD model. Moreover, the mode choice and destination choice factors of MITO and MoPeD need to be integrated to meet the needs for pedestrian modeling. Therefore, to develop an integrated model suite, the following adaptions were implemented:
-
(1)
Appropriate zone systems for measuring pedestrian built environment and modeling pedestrian behaviors.
-
(2)
Built environment factors in the mode choice models and the destination choice models for different trip purposes.
-
(3)
Hybrid trip decision processes to establish the interfaces between MITO and MoPeD
Modeling process
Figure 4 gives an overview of the hybrid trip decision process linking MITO and MoPeD. The framework essentially follows the paradigm of the traditional four-step model.

The travel demand modeling process of the MITO/MoPeD model
Given the nature of work and education trips, those trips are modeled first. The number of work and education trips is modeled in MITO. Then, work and education trips are fed into MoPeD to make the walk mode decisions. Work and school locations are provided by the synthetic population files as input data. Hence, no destination choice is necessary here for work and education trips. After that, the modes of work and education trips that are not made by walking are modeled in MITO.
Following the work and education trips, other trips are generated which takes the number of work and education trips as one of the independent variables. Home-based shopping (HBS), home-based recreational (HBR), and home-based other (HBO) trips are simulated before the non-home-based ones (NHBW and NHBO). This is because we assume that the trip origins of non-home-based trips are influenced by the destination end of home-based trips. Similar to the work and education trips, those trips are first sent to MoPeD to select walking or not walking. The destination of walk trips is subsequently selected in MoPeD. Then, non-walk trips are fed back to MITO for TAZ destination choice and non-walk mode choice.
In the end, the selection of the preferred arrival time is modeled in MITO for all trips. The resulting trips are passed on to MATSim for trip assignment on the networks of different modes. Pedestrian flows are simulated in MATSim using the shortest path algorithm. We recognize that pedestrians may use other decision criteria besides trip distance (e.g. safety, comfort, scenery); however, data about network qualities are not available.
Zonal system
The Munich Model uses 4953 gradually-sized zones as its spatial unit (as shown in Fig. 5). The sizes of zones vary from 200 m to several kilometers. Coarser scales that are larger than 800 m might cause high errors in predicting walk behavior (Zhang et al. 2019). Thus, a finer and uniform zone system is needed for the MITO/MoPeD model.

The Munich Metropolitan Area with TAZ zone systems (left) and the comparison of TAZs and PAZs (right)
Previous studies have pointed out that the finest spatial resolution may not be the appropriate scale. The spatial resolution selection is a trade-off among model performance, efficiency, and the availability of spatial data needed to implement (Zhang et al. 2019). The spatial units chosen to model the pedestrian behavior for this research depend on the relevant data available for Munich. Land cover data for the Munich region is provided as a 100 × 100 m raster. More importantly, the appropriate spatial resolution highly depends on the type of application. In this research, we aim to assess the unit of physical activity (PA). Health studies concluded that there is a non-linear dose–response relationship for PA (Woodcock et al. 2011). This means short walk trips might have large impacts on individuals with low PA. Because of this non-linearity, short walks need to be better captured in the MITO/MoPeD model, which further determines the necessity of using a finer spatial resolution. Therefore, we define the PAZ scale for the Munich region as 100 × 100 m raster. With such a small PAZ scale, the study area of the Munich region is covered by approximately 2,000,000 PAZ equivalents. A comparison of TAZs and PAZs can be found in Fig. 5.
As the trip origin and destination locations in MITO are simulated at the micro-location level (in x/y coordinate), it is flexible to aggregate locations to any spatial resolution. The PAZ zone system is utilized in MoPeD for walk mode choice. In the walk trip distribution stage, destination choice is first conducted at SuperPAZs (400 m grid cells). Then, trips are allocated from the selected SuperPAZ to the constituent PAZs. Trips that are not made by walking are handled in MITO at the TAZ zonal structure.
Built environment factors
Walking behavior is highly correlated to built environment variables. The Munich Model considers a few built environment variables in the walk mode choice and walk destination choice model. For example, area type dummies are used primarily to differentiate land use at an aggregated level. To model the effects of the built environment on pedestrian travel behavior, the measurement of pedestrian accessibility is included in the MITO/MoPeD model. Pedestrian accessibility is defined as population and non-industrial jobs within an 800 m network distance. Pedestrian accessibility data in the Munich region has been measured at the PAZ level. First, the isochrones, also known as pedestrian catchment areas, are generated based on the pedestrian network from OpenStreetMap. Afterward, we calculated the total number of non-industrial jobs and population that locate within each isochrone. Results of pedestrian accessibility for the Munich region are shown in Fig. 6.

Pedestrian accessibility in the Munich city area
The built environment factors used in the MITO/MoPeD model are listed in Table 1. MoPeD has a rich list of built environment variables in the walk destination choice model. Those factors are all implemented in the MITO/MoPeD model. The data of those factors are mainly derived from OpenStreetMap. Trip distance is added as an explanatory variable only in the walk mode choice models for work and education trips, as the destination of those trips is already given in the synthetic population. For trips with other purposes like shopping and recreation, the trip length is unknown at the walk mode choice stage. As the focus of this paper is the model integration and application, the parameter estimates of the home-based shopping model are shown as an example in Table 2 and the full estimation results can be found in the technical summary report on Github (https://github.com/Qinnnnn/MoPeD_Java).
Mode choice model calibration
Due to the lack of geographic information about the trips in the German national household travel survey, model parameters cannot be re-estimated using local surveys. Therefore, the model estimates used in the MITO/MoPeD model were developed in the context of the Portland, Oregon metropolitan area in the United States while they are applied to the Munich study area in Germany.
Previous works have focused on the spatial and temporal transferability of travel forecasting models (Agyemang-Duah and Hall 1997; Cotrus et al. 2005; Everett 2009; Huntsinger and Rouphail 2013; Sikder et al. 2013). They showed the ability to transfer models between different regions and suggested the methods used to enhance model transferability. Updating constants/adding new constants is a widely used method in practice to enhance the model suitability.
To make a fair comparison between the two modeling frameworks, a mode choice calibration process was implemented in the MITO/MoPeD model. In this research, we assumed that the parameters other than the constants are transferable in two contexts. Additional constants were introduced into the mode choice models to scale up the average walk shares to match the observed shares. Table 3 shows the final calibration factors implemented in the models by trip purposes. These calibration factors represent the difference between the influences of unobserved factors (e.g., mobility culture, geography, and weather) in Portland and Munich.
Figure 7 compares the simulated walk shares by trip purposes to the observed walk shares taken from Germany household survey data 2017—Mobilität in Deutschland (MiD). Before calibration, the walk mode choice models in the MITO/MoPeD model underestimated the shares of walk trips across all purposes. Although there are deviations in the absolute values, the relative relationships among purposes are consistent with the observed data. For example, recreational trips (HBR) have the highest shares of walking while work-related trips (HBW and NHBW) have lower walk shares.

Observed walk shares of MiD and predicted walk shares resulting from the MITO/MoPeD model by trip purposes
Results and discussion
To answer the research questions mentioned above and to test the plausibility of the MITO/MoPeD model, this section evaluates how effectively the MITO/MoPeD model structure improves the estimation of transport outcomes and physical activity volumes. The Munich model and the MITO/MoPeD model are applied to the Munich metropolitan area. Model performances are analyzed based on average walk shares, the spatial distribution of walk shares, mean trip length, trip length distribution, pedestrian flows, and physical activity volumes.
Walk mode shares
The share of walk trips is one of the key outcomes for investigating policies and strategies to encourage walking.
After calibration, both models can simulate the average walk shares accurately. Besides the mean value, the spatial distribution of walk trips is also an important outcome to evaluate the model performance. Figure 8 presents the spatial distribution of walk shares across the Munich metropolitan area resulting from two modeling frameworks. From an overall perspective, both models demonstrate similar patterns that walk shares in the urban areas are higher than those in the suburban or rural areas. Nevertheless, we note that the distribution in the Munich Model (Fig. 8a) has a boundary issue. The border areas sometimes show high walk shares which are at the same level as the urban centers.

Shares of walk trips resulting from the Munich Model across Munich metropolitan area (a) and in Munich city (c); Shares of walk trips resulting from the MITO/MoPeD model across Munich metropolitan area (b) and in Munich city (d)
There are three major reasons why these border areas have higher walk shares than we expected. First, trip distance is a key factor of the mode selection in the Munich Model. Shorter trips tend to use the walk mode. The border areas have limited destination alternatives and their surrounding areas are mostly rural and less attractive. Thus, trips generated in those areas are more likely to select a closer destination with a short distance which leads to a high share of walk trips. The second reason may be due to the coarse zone system used in the Munich Model. Larger zones result in a greater share of intrazonal trips. As intrazonal trips have the same trip length which is relatively short, having larger zones causes an overestimation of walk trips. Lastly, built environment variables like population and employment density are not considered when selecting modes in the Munich Model. This means short trips generated in the less-populated areas have the same likelihood of choosing walking as those in the urban areas.
Benefit from the fine spatial resolution used in the MITO/MoPeD model, trips are modeled with more precise network distances rather than being considered as same length intrazonal trips. In addition, by introducing the activity density into the walk mode choice models, the MITO/MoPeD model can better capture the differences in walk shares between urban areas and rural areas. As shown in Fig. 8b, the MITO/MoPeD model mitigates the issue of walk share overestimation at the border areas.
To have a closer look into the walk share distributions in the Munich city area. The results of the Munich Model (Fig. 8c) show that walk trips are sprawled in the entire Munich city area though we can see a decreasing trend in the outer areas. Given the coarse spatial resolution, it is difficult to observe the areas for pedestrian demand in the Munich city area. Nevertheless, the MITO/MoPeD model can give us a clearer picture of the hotspots for walk trips as shown in Fig. 8d.
Trip length distribution
Previous studies have found that destination choice models are the largest source of errors in travel demand models (Zhao and Kockelman 2002). Trip length distributions can be used to evaluate the performance of destination choice models. Figure 9a shows the trip length distribution of all trips. Compared to the observed data, the Munich Model has a significant deviation for the short distance trips. Figure 9b presents the distribution of walk trips. It indicates that the Munich Model overestimated the trip lengths for walk trips and then further confirms that the Munich Model is poor at capturing pedestrian travel behaviors. Nevertheless, both figures indicate that the MITO/MoPeD model performed better in modeling walk trip lengths. Without any calibration, the shape of the walk trip distribution of the MITO/MoPeD model is almost matched to the observed data. For the MITO/MoPeD model, we find that the left side of the distribution and the peak are close to the observed data, but there is a large difference on the right side of the distribution. This means that the MITO/MoPeD model underestimates long-distance walk trips.

Comparison of trip length distribution of all trips (a) and comparison of trip length distribution of walk trips (b)
Pedestrian flows
After walk trips were generated, they were then passed on to MATSim for route assignment. In this study, the shortest path algorithm is used for assigning walk trips. In future studies, pedestrian route choice behavior needs to be further investigated and more advanced routing techniques need to be applied to get more precise route estimates.
Figure 10 compares pedestrian volumes of network links resulting from two models. We can find that pedestrian flows are sprawled in the Munich Model and pedestrian volumes are much higher than those in the MITO/MoPeD model. The lack of count data is a barrier to model validation. Thus, in this study, we cannot make a conclusion about the model performance based on pedestrian flow maps. However, we hypothesize that the Munich Model overestimated the pedestrian volumes on the links. As discussed above, the Munich model was poor at simulating walk trip lengths. The overestimation of walk trip lengths results in an overestimation of pedestrian kilometers traveled in the trip assignment stage. The total pedestrian kilometer traveled is 239,539 km in the MITO/MoPeD model while the number is 738,599 km in the Munich Model which is almost tripled. The high value of pedestrian kilometers traveled in the Munich Model may be the reason for high pedestrian volumes on network links. The results from the MITO/MoPeD model show a more reasonable pattern in that the network in the city center has higher pedestrian volumes with a diminishing trend outward.

Comparison of pedestrian volumes assigned to the network links
Volume of physical activity
PA volume is one of the critical inputs to measure an individual’s health indicators. PA commonly has four domains including occupational, domestic, leisure, and transportation. In this study, we focus on PA in the transportation domain. For this, information on all walking and cycling activities is usually included to measure PA volume (James Woodcock et al. 2013). In this study, modeling components of bicycle trips are unchanged so that the cycling activities retain the same in the base model and the MITO/MoPeD model. To avoid confounding comparisons, this study only measures the walk trips for physical activity volume.
Physical activity volume is the product of frequency, duration, and intensity. Commonly, it is measured over a week-long period with the unit of mMET-hours per week (James Woodcock et al. 2013). In this study, the transport models only simulate the travel demand on a typical day, so the walk trips are multiplied by a factor of 7. Walk trip durations are measured using the walk trip distances resulting from MATSim. Trip distances are converted to durations using an average speed. Ideally, speeds could be differentiated by age and sex to measure PA volume more precisely. However, for this study, we try to skim off confounding factors and investigate a pure comparison between the base model and the MITO/MoPeD model. Therefore, an average speed of 4.8 km/h is chosen for walk trips (Kahlmeier et al. 2014). Similarly, a single value of intensity is used for all walk trips. This is 3.61 mMETs for walking which is the median intensities obtained from a recent objective study on commuters by Costa et al. (2015). Thus, the PA volume of individual i is measured by the following equation:
Figure 11 compares the distribution of PA volume resulting from two modeling frameworks. The observed PA distribution based on MiD 2017 is considered as the reference. In this plot, the proportions of inactive individuals (the values at x = 0) are very high. This is because we only measured walk trips and it is incomplete for assessing total PA. The results first confirm the hypothesis that the Munich Model is poor at assessing PA volumes. The fundamental issue is that the Munich Model overestimates the length of walk trips. As a result, the Munich Model overestimates the PA volumes of each individual. As discussed before, the MITO/MoPeD model has a better performance in capturing the distribution of walk trip lengths, so we didn’t see the issue of overestimating PA volumes in the MITO/MoPeD model. However, the plot reveals that the MITO/MoPeD model generally underestimates PA volumes.

Comparison of physical activity volume distribution
There are three major reasons for the underestimation of PA volumes in the MITO/MoPeD model. First, as discussed above, the MITO/MoPeD model is poor at modeling long and uncommon walk trips while those long walk trips are recorded in MiD data. Missing these long walk trips causes the underestimation of PA volumes. Another reason is that access and egress trips to public transport are not modeled in the transport model, resulting in the elimination of a small share of PA. Lastly, the observed data may be biased by walk distances since the distances in the survey were self-reported.
Conclusions
We advanced the state of modeling pedestrian behaviors by including them in the agent-based travel demand model. The integrated MITO/MoPeD model builds a link between advanced pedestrian modeling techniques with the agent-based transport model. More importantly, we applied the MITO/MoPeD model to a Munich case study. This allows us to evaluate how effectively the MITO/MoPeD model improves the estimation of transport outcomes when compared to the traditional agent-based transport model.
The results suggested that the traditional transport model framework—the Munich Model-can simulate the walk behavior well at the aggregate level, but it is poor at matching the individual level and the spatial distribution of walk behaviors. More importantly, the results showed that the MITO/MoPeD model can better simulate travel outcomes than the Munich Model. First, benefit from the fine spatial resolution used in the MITO/MoPeD model, travel outcomes like walk shares are better reflected spatially which gives us a better picture of how walk trips are distributed across the study areas. In addition, by introducing built environment factors in the models, the MITO/MoPeD model better captures the differences in walk shares between dense areas and less-populated areas. The MITO/MoPeD model also showed a better performance in modeling trip length distribution. The finer zonal resolution helped solve the intrazonal trip issue and consequently simulates the length of short trips more accurately. With regards to physical activity volumes, although the results of the MITO/MoPeD model cannot perfectly match the observed data, it overcomes the overestimation issue in the Munich Model.
This research still faces some limitations that should be addressed in future work. The access and egress walk trips are neglected in the MITO/MoPeD model. To simulate physical activity volumes more precisely, those trips navigating to public transport need to be considered in the model. In addition, the calculation methodology of physical activity volumes has been heavily simplified. For comparison of model results, a simplified calculation methodology can help us to eliminate confounding factors. However, for a more realistic health assessment, future research could introduce more precise PA intensities using available information on gradient, speed, age, and sex. Moreover, the results revealed that long-distance walk trips were underestimated in the MITO/MoPeD model. Those long-distance walk trips could contribute a lot to health impacts so the model needs to be enhanced to better capture long walk trips. Furthermore, though having pedestrian route choice in the MITO/MoPeD model is an improvement. In future studies, more advanced algorithms that consider route decision factors like safety, comfort, and scenery need to be investigated and applied. Lastly, to transfer model estimates from Portland to the Munich context, we applied the simple transfer method by updating constants. This approach helps us to match the mode shares at an aggregate level, but it does not capture the differences in the magnitude of variation in observed and unobserved factors. Therefore, more advanced approaches can be applied in the future to enhance model transferability.
In conclusion, the presented model in this paper is one of the first to incorporate pedestrian modeling into the agent-based transport model. This work demonstrates that the model is capable of simulating transport outcomes more precisely. Those outcomes are critical inputs to health impact assessment. Thus, we see the potential of the MITO/MoPeDmodel to link with the health assessment tool to evaluate individual health impacts. For example, the number of walk trips along or across a corridor can be used as a measure of exposure when calculating crash rates and assessing traffic safety. Physical activity volumes could be used to assess the relative risk of all-cause mortality. Routes of walk trips on a pedestrian network can improve the precision of these metrics but also can be used for measuring air pollutant exposure while traveling. Such a model has a great opportunity of incorporating health and environmental research. More importantly, it is useful for policy analysis, including investments in transportation infrastructure, land use planning, assessment of safety and health outcomes, and evaluation of environmental impacts.
References
Agyemang-Duah, K., Hall, F.L.: Spatial transferability of an ordered response model of trip generation. Transp. Res. Part A Policy Pract. 31(5), 389–402 (1997). https://doi.org/10.1016/S0965-8564(96)00035-3
Antonini, G., Bierlaire, M., Weber, M.: Discrete choice models of pedestrian walking behavior. Transp. Res. Part b Methodol. 40(8), 667–687 (2006). https://doi.org/10.1016/j.trb.2005.09.006
Bonabeau, E.: Agent-based modeling: methods and techniques for simulating human systems. Proc Natl. Acad. Sci. 99(suppl_3), 7280–7287 (2002). https://doi.org/10.1073/pnas.082080899
Borrmann, A., Kneidl, A., Köster, G., Ruzika, S., Thiemann, M.: Bidirectional coupling of macroscopic and microscopic pedestrian evacuation models. Saf. Sci. 50(8), 1695–1703 (2012). https://doi.org/10.1016/j.ssci.2011.12.021
Clifton, K. J., Orrego-Oñate, J., Singleton, P., Schneider, R.: Transferability & forecasting of the pedestrian index of the environment (PIE) for modeling applications (2019). https://doi.org/10.15760/trec.218
Clifton, K. J., Singleton, P., Muhs, C., Schneider, R.: Development of a pedestrian demand estimation tool (2015). https://doi.org/10.15760/trec.124
Clifton, K.J., Singleton, P.A., Muhs, C.D., Schneider, R.J.: Development of destination choice models for pedestrian travel. Transp. Res. Part A Policy Pract. 94, 255–265 (2016a). https://doi.org/10.1016/j.tra.2016.09.017
Clifton, K.J., Singleton, P.A., Muhs, C.D., Schneider, R.J.: Representing pedestrian activity in travel demand models: framework and application. J. Transp. Geogr. 52, 111–122 (2016b). https://doi.org/10.1016/j.jtrangeo.2016.03.009
Costa, S., Ogilvie, D., Dalton, A., Westgate, K., Brage, S., Panter, J.: Quantifying the physical activity energy expenditure of commuters using a combination of global positioning system and combined heart rate and movement sensors. Prev. Med. 81, 339–344 (2015). https://doi.org/10.1016/j.ypmed.2015.09.022
Cotrus, A.V., Prashker, J., Shiftan, Y.: Spatial and temporal transferability of trip generation demand models in Israel. J. Transp. Stat. 8, 37–56 (2005)
Delaware Valley Regional Planning Commission: DVRPC Travel Demand Model Upgrade: Travel Improvement Model (TIM) 1.0 (Issue January) (2011)
Erdmann, J., Krajzewicz, D.: Modelling pedestrian dynamics in SUMO. SUMO User Conference, 103–118 (2015). http://elib.dlr.de/100554/
Everett, J.D.: An Investigation of the Transferability of Trip Generation Models and the Utilization of aSpatial Context Variable. University of Tennessee (2009)
Ewing, R., Cervero, R.: Travel and the built environment. J. Am. Plann. Assoc. 76(3), 265–294 (2010). https://doi.org/10.1080/01944361003766766
Gehrke, S., Clifton, K.: Operationalizing land use diversity at varying geographic scales and its connection to mode choice. Transp. Res. Record J. Transp. Res. Board 2453, 128–136 (2014). https://doi.org/10.3141/2453-16
Gehrke, S.R., Clifton, K.J.: An activity-related land use mix construct and its connection to pedestrian travel. Environ. Plann. B Urban Anal. City Sci. (2017). https://doi.org/10.1177/2399808317690157
Horni, A., Nagel, K., Axhausen, K.W.: The multi-agent transport simulation MATSim. Ubiquity Press (2016). https://doi.org/10.5334/baw
Huntsinger, L.F., Rouphail, N.M.: Temporal stability of generation choice models. Transp. Res. Rec. 2344, 79–87 (2013). https://doi.org/10.3141/2344-09
Kahlmeier, S., Kelly, P., Foster, C., Götschi, T., Cavill, N., Dinsdale, H., James Woodcock, Schweizer, C., Rutter, H., Lieb, C., Oja, P., Racioppi, F: Health Economic Assessment Tools ( HEAT ) for walking and for cycling economic assessment of transport infrastructure (2014). http://www.euro.who.int/en/health-topics/environment-and-health/Transport-and-health/publications/2011/health-economic-assessment-tools-heat-for-walking-and-for-cycling.-methodology-and-user-guide.-economic-assessment-of-transport-infrastructure-and-polic
Khan, M., Kockelman, K.M., Xiong, X.: Models for anticipating non-motorized travel choices, and the role of the built environment. Transp. Policy 35, 117–126 (2014). https://doi.org/10.1016/J.TRANPOL.2014.05.008
Kielar, P.M., Borrmann, A.: Modeling pedestrians’ interest in locations: a concept to improve simulations of pedestrian destination choice. Simul. Model. Pract. Theory 61, 47–62 (2016). https://doi.org/10.1016/j.simpat.2015.11.003
Kuzmyak, J.R., Walters, J., Bradley, M., Kockelman, K.M.: Estimating bicycling and walking for planning and project development: a guidebook. Transp. Res. Board (2014). https://doi.org/10.17226/22330
Liu, F., Evans, J.E., Rossi, T.: Recent practices in regional modeling of nonmotorized travel. Transp. Res. Record J. Transp. Res. Board 2303(1), 1–8 (2012). https://doi.org/10.3141/2303-01
Moeckel, R., Kuehnel, N., Llorca, C., Moreno, A.T., Rayaprolu, H.: Agent-based simulation to improve policy sensitivity of trip-based models. J. Adv. Transp. 2020, 1902162 (2020). https://doi.org/10.1155/2020/1902162
Molloy, J., Moeckel, R.: Automated design of gradual zone systems. Open Geospatial Data Softw. Standards 2(1), 19 (2017). https://doi.org/10.1186/s40965-017-0032-5
Moreno, A., Moeckel, R.: Population synthesis handling three geographical resolutions. ISPRS Int. J. Geo Inf. 7(5), 174 (2018). https://doi.org/10.3390/ijgi7050174
Okrah, M.B.: Evaluation of methods for estimation of intrazonal travel impedances. Transp. Res. Record J. Transp. Res. Board 2563(1), 114–121 (2016). https://doi.org/10.3141/2563-16
Portland METRO: 2018 Trip‐based travel demand model methodology report (2020)
San Francisco County Transportation Authority: San Francisco travel demand forecasting model development: executive summary. 29 (2002)
Schneider, R., Arnold, L., Ragland, D.: Pilot model for estimating pedestrian intersection crossing volumes. Transp. Res. Record J. Transp. Res. Board 2140, 13–26 (2009). https://doi.org/10.3141/2140-02
Schnittger, S., Zumkeller, D: Longitudinal Microsimulation as a tool to merge transport planning and traffic engineering models: the MobiTopp model. (2004)
Sikder, S., Pinjari, A.R., Srinivasan, S., Nowrouzian, R.: Spatial transferability of travel forecasting models: a review and synthesis. Int. J. Adv. Eng. Sci. Appl. Math. 5(2–3), 104–128 (2013). https://doi.org/10.1007/s12572-013-0090-6
Singleton, P.A., Totten, J.C., Orrego-Oñate, J.P., Schneider, R.J., Clifton, K.J.: Making strides: state of the practice of pedestrian forecasting in regional travel models. Transp. Res. Record J. Transp. Res. Board 2672(35), 58–68 (2018). https://doi.org/10.1177/0361198118773555
Waddell, P.: UrbanSim : modeling urban development for land use, transportation and environmental planning UrbanSim: modeling urban development for land use, transportation and environmental planning abstract. J. Am. Plann. Assoc. 68(3), 297–314 (2002). https://doi.org/10.1080/01944360208976274
Woodcock, J., Franco, O.H., Orsini, N., Roberts, I.: Non-vigorous physical activity and all-cause mortality: systematic review and meta-analysis of cohort studies. Int. J. Epidemiol. 40(1), 121–138 (2011). https://doi.org/10.1093/ije/dyq104
Woodcock, J., Givoni, M., Morgan, A.S.: Health impact modelling of active travel visions for england and wales using an integrated transport and health impact modelling tool (ITHIM). PLoS ONE 8(1), e51462 (2013). https://doi.org/10.1371/journal.pone.0051462
Zhang, Q., Clifton, K.J., Moeckel, R.: Investigate an appropriate spatial resolution for large-scaled pedestrian travel demand model. Transp. Res. Proc. 41, 324–327 (2019). https://doi.org/10.1016/j.trpro.2019.09.053
Zhang, Q., Moeckel, R., & Clifton, K. (2022). Assessing pedestrian impacts of future land use and transportation scenarios. Journal of Transport and Land Use 15(1), 547–566. https://doi.org/10.5198/jtlu.2022.2117
Zhao, Y., Kockelman, K.M.: The propagation of uncertainty through travel demand models: an exploratory analysis. Ann. Reg. Sci. 36(1), 145–163 (2002). https://doi.org/10.1007/s001680200072
Funding
Open Access funding enabled and organized by Projekt DEAL. This study was funded by German Excellence Initiative and the European Union Seventh Framework Programme under Grand Number 291763.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection, and analysis were performed by QZ. The first draft of the manuscript was written by QZ and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhang, Q., Moeckel, R. & Clifton, K.J. MoPeD meets MITO: a hybrid modeling framework for pedestrian travel demand. Transportation 51, 1327–1347 (2024). https://doi.org/10.1007/s11116-022-10365-x
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11116-022-10365-x