
Abstract
In this study, the beta time fractional (2 + 1) dimensional Chaffee–Infante equation used to describe the behavior of gas diffusion in a homogeneous medium is discussed. Generalized Kudryashov and modified Kudryashov procedures were used to discovered solitons of the equation. These methods can be easily applied and offer different solutions checked to other methods in the literature. At the same time, these two methods use symbolic calculations to better understand various nonlinear wave models and offer a powerful and effective mathematical approach. The solutions created in this article are different from those in the literature and will guide those working in the field of physics and engineering to better understand this model. Figures of the results were made values different from each other. The stability of the equations in applications has been demonstrated by testing the stability feature on some solutions obtained using the features of the Hamilton system. This work demonstrates the power and effectiveness of the methods discussed in applying many different forms of fractional-order nonlinear equations. The results obtained in this paper are original to our research and have the potential to be helpful in the fields of mathematical engineering and physics.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Many problems exist in different fields of study such as wave propagation, fluid mechanics, mechanical engineering, dynamical systems, chemistry, image processing, plasma physics, hydrodynamics, finance, biology, optics and other fields of engineering and science. Some scientists have proposed and researched nonlinear fractional partial differential equations (NFPDEs) (Zubair et al. 2018; Raza et al. 2019; Hosseini et al. 2020). Suggested numerous different definitions have been presented in the study (Yang et al. 2019; Park et al. 2020). Lately, investigators have begun to view a deficit at most of the fractional derivative definitions (Samko et al. 1993; Kilbas et al. 2006). Since fractional differential equations are an important field in plasma physics, mathematical physics, mathematical biology, nonlinear optics, applied mathematics, and quantum field theory, the solutions of these equations, along with their soliton-type solutions, have become very important. Fractional derivatives have an important place in the study of real-world problems so there is a different types of fractional derivatives for example Caputo fractional derivative, conformable derivative, modified Riemann-Liouville derivative, Riemann-Liouville derivative, beta derivative and many others. The universe is filled with events nonlinear and inner behaviors of this nonlinear are modeled for samples next to nonlinear alongside differential equations of fractional order as well as whole number order (Miller and Ross 1993; Hassani et al. 2020). It is thought that fractional-order equations analyze the intricate properties of complicated physical phenomena that occur in many fields of study on a small scale (Gomez-Aguilar et al. 2018; Bonyah et al. 2018). Later, scientists searched deeply to find approximate and suitable solutions nonlinear evolution equations, and as a result of their research, many methods have been developed recently to solve nonlinear evolution equations due to the differing opinions of scientists. On the instant, Seadawy handled the extended auxiliary equation procedure (Seadawy 2017), Duran et al. were interested in the modified \(\left( 1/G^{\prime }\right)\)-expansion practice (Duran et al. 2021a), Jianming et al. investigated the Backlund transformation procedure (Jianming et al. 2011), Yokus analyzed the extended finite difference procedure (Yokus 2018), Ablowitz and Clarkson handled the inverse scattering transformation practice (Ablowitz and Clarkson 1991), Duran et al. investigated the Bernoulli sub-equation function method (Duran et al. 2021b), Helal and Mehana investigated the Adomian decomposition practice (Helal and Mehana 2006), Al-Mdallal and Syam were interested in the sine–cosine procedure (Al-Mdallal and Syam 2007), Das and Ghosh paid attention to the \(\left( G^{\prime }/G\right)\) -expansion procedure (Das and Ghosh 2019), Islam and Akter handled the rational fractional \(\left( D_{\xi }^{\alpha }G/G\right)\)-expansion practice (Islam and Akter 2020), Mohyud-Din et al. handled the variational iteration practice (Mohyud-Din et al. 2009), Hashemi and Mirzazadeh were interested in the Lie symmetry practice (Hashemi and Mirzazadeh 2023), Wazwaz analyzed the sine-cosine procedure (Wazwaz 2004), Bekir investigated the \((G^{\prime }/G)\)-expansion procedure (Bekir 2008), Arshed et al. were interested in the first integral practice (Arshed et al. 2020), Biswas et al. handled the modified simple equation method (Biswas et al. 2018), Celik analyzed the F expansion practice (Çelik 2021), Kudryashov acquired the exact solutions of the Fisher model by the Kudryashov method (Kudryashov 2012), Kudryashov handled the first integral method (Kudryashov 2020), Kudryashov explored the general projective Riccati equations and the enhanced Kudryashov’s methods (Kudryashov 2023), Wang et al. applied the semi-inverse method to fractal (2 + 1)-Dimensional Zakharov–Kuznetsov model (Wang 2023a; Wang and Xu 2023; Wang et al. 2023a), Alquran applied the Maclaurin series to nonlinear equations (Alquran 2023a), Alquran applied the rational sine-cosine approach to second fourth-order Wazwaz equation (Alquran 2023b), Jaradat and Alquran applied the Kudryashov expansion method to (2 + 1)-dimensional two-mode Zakharov–Kuznetsov equation (Jaradat and Alquran 2020), Ghanbari applied the algorithm of the new method to the Oskolkov and the Oskolkov–Benjamin–Bona–Mahony–Burgers equations (Ghanbari 2021a), Ghanbari and Gómez–Aguilar applied the generalized exponential rational function procedure to the nonlinear Radhakrishnan–Kundu–Lakshmanan model (Ghanbari and Gómez-Aguilar 2019a), Sadaf et al. applied the \(\left( \frac{G^{\prime }}{G}, \frac{1}{G}\right)\)-expansion method to CI equation (Sadaf et al. 2023a), Mahmood et al. applied the modified Khater method to the (2 + 1)-dimensional Chaffee–Infante equation (Mahmood et al. 2023), Akram et al. applied the extended \(\left( \frac{G^{\prime }}{G^{2}}\right)\)-expansion method to the higher order nonlinear Schrödinger equation (Akram et al. 2023a, 2023b, c) and so on (Wang 2023b, c, d, e, f; Wang and Shi 2022; Wang et al. 2023b, c; Ali et al. 2019; Jaradat et al. 2018; Jaradat and Alquran 2022; Ghanbari 2022; Ghanbari and Gómez-Aguilar 2019b; Ghanbari and Baleanu 2019, 2020, 2023a, 2023b; Khater and Ghanbari 2021; Ghanbari 2019, 2021b; Ghanbari et al. 2018; Ghanbari and Akgül 2020; Ghanbari and Kuo 2019; Tian et al. 2022; Sadaf et al. 2023b.
The Chaffee–Infante (CI) model, which is useful for studying the diffusion formation of a gas in a uniform medium, is very important. Therefore, it has an important role in the field of mathematics and physics (Raza et al. 2021). The CI equation was first studied by Nathaniel Chafee and Ettore Infante. The most interesting aspect is a bifurcation in the system parameter that indicates the steepness of the potential. The CI model is very important in many areas, for example; such as ion-acoustic waves in plasma, fluid dynamics, plasma physics, sound waves, and electromagnetic waves Sriskandarajah and Smiley (1996). This model is the standard representation of endless-dimensional gradient systems in which the structure of the spherical attractor can be exactly characterized (Caraballo et al. 2007). The appropriate derivative time-fractional CI equation is as follows:
where \(\alpha\) represents the coefficient of diffusion and \(\theta\) represent degradation coefficient. The diffusion of a gas in a homogeneous medium is an important phenomenon in a physical context and the CI model provides a useful model to study such phenomena.
Scientists analyzed the (2 + 1) CI equation using many different solution methods, for example, Sakthivel and Chun applied the exp-function approach (Sakthivel and Chun 2010), Riaz et al. applied Lie symmetry analysis (Riaz et al. 2021), Mao applied the trial equation practice (Mao 2018), Qiang et al. applied the undetermined coefficient procedure (Qiang et al. 2013), Akbar et al. applied the first integral practice (Akbar et al. 2019), and Arshed et al. utilized the sinh-Gordon expansion practice (Arshed et al. 2023).
The beta derivative
Fractional derivatives are very important in scientific study fields. For this reason, fractional derivatives have been studied in depth and many definitions have been found, for example; Grunwald–Letnikov, Riemann–Liouville, the Caputo, modified Riemann–Liouville, and Atangana–Baleanu derivatives (Samko et al. 1993; Kilbas et al. 2006). In this paper, the beta derivative will be hadled. The most important property of this derivative is that the chain rule is applicable. Thus, we can reduce nonlinear differential equations to ordinary differential equations with the help of wave transformations. The beta derivative satisfies several properties that were as limitation for the fractional derivatives and has been used to model some physical problems. Basic definitions of the beta derivative are given as follows:
Definition
Let \(\ \psi \left( t\right)\) be a function defined for all non-negative t. The \(\beta\) derivative of \(T^{\beta }\left( \psi \left( t\right) \right)\) of order \(\beta\) is given by
where \(T^{\beta }\left( \psi \left( t\right) \right) =\frac{d^{\beta }\psi \left( t\right) }{dt^{\beta }}\) and \(0<\beta \le 1\)
Some rules are given for \(\beta\) derivative by the following theorem.
Theorem
Let \(\psi \left( t\right)\) and \(\varphi \left( t\right)\) be \(\beta\) -differentiable functions for all \(t>0\) and \(\beta \epsilon (0,1] .\) Some basic properties are discussed as follows:
-
1.
\(T^{\beta }(a_{1}\psi (t)+a_{2}\varphi (t))=a_{1}T^{\beta }(\psi (t))+a_{2}T^{\beta }(\varphi (t)),\forall a_{1},a_{2}\in R\)
-
2.
\(T^{\beta }(\psi (t)\varphi (t))=\varphi (t)T^{\beta }(\psi (t))+\psi (t)T^{\beta }(\varphi (t)),\)
-
3.
\(T^{\beta }(\frac{\psi (t)}{\varphi (t)})=\frac{\varphi (t)T^{\beta }(\psi (t))-\psi (t)T^{\beta }(\varphi (t))}{\varphi (t)^{2}},\)
-
4.
\(T^{\beta }(\psi (t))=\left( t+\frac{1}{\Gamma \left( \beta \right) }\right) ^{1-\beta }\frac{d\psi \left( t\right) }{dt}\) (Atangana et al. 2016).
The main procedure of this article is to find exact solutions to the CI model. The methods are explained in the second section. In chapter 3, the methods are applied to the CI equation. The stability test was applied to the exact solutions found in Sect. 4. In chapter 5, the exact solution graphs of the equation are given.
2 Methods
Think that nonlinear time fractional conformable differential equation as follows:
where u is a variable depending on x and t, \(\beta\) represents beta fractional order derivative. The wave transformation will be used as follows:
where
If we utilize the wave transformation to Eq. (2), the nonlinear ordinary differential equation is obtained as follows:
2.1 The generalized Kudryashov procedure
We choose the solution for \(U(\xi )\) as follows:
here \(a_{i},b_{j}\left( i=0,1,\ldots ,n,j=0,1,\ldots ,m\right)\) are constants and \(a_{n},b_{m}\) should be different from zero. \(\Omega \left( \xi \right)\) provides the following differential equation:
the solution of the Eq. (7) is given by:
where \(\chi\) is the integral constant. Positive integers n and m are calculated by the homogeneous balancing principle, using the order of the highest-order derivative term and the degree of the highest-order nonlinear term. Expression (6) is written into equation (5) using (7) and the polynomial \(\Omega \left( \xi \right) ^{i-j}(i,j=1,2,3,\ldots )\) is obtained. An algebraic equation system is found by setting all coefficients of this polynomial dependent on \(\Omega \left( \xi \right)\) equal to zero. The obtained algebraic equation system is solved according to the coefficients \(a_{i},b_{j},v,\alpha\) and the solutions of equation (5) are obtained. The exact solutions of equation (2) are obtained by writing \(\xi =x+y-\frac{v}{\beta }\left( t+\frac{1}{\Gamma \left( \beta \right) }\right) ^{\beta }\) to the solutions of equation (5) (Akbulut 2023; Akbar et al. 2021; Akbulut and Kaplan 2021).
2.2 The modifed Kudryashov procedure
We choose the solution for \(U(\xi )\) as follows:
where \(a_{i}\left( i=0,1,\ldots ,n\right)\) are constants and there should be \(a_{n}\ne 0\). \(\Omega \left( \xi \right)\) provides the following ordinary differential equation:
the solution of the Eq. (10) is given by:
where \(\chi\) is the integral constant. n is calculated by the homogeneous balancing principle, using the order of the highest-order derivative term and the degree of the highest-order nonlinear term. Expression (9) is written into equation (5) using (10) and the polynomial \(\Omega \left( \xi \right) ^{i}(i=1,2,3,\ldots )\) is obtained. An algebraic equation system is found by setting all coefficients of this polynomial dependent on \(\Omega \left( \xi \right)\) equal to zero. This algebraic equation system is solved according to the coefficients \(a_{n},v,\alpha\) and the solutions of equation (5) are obtained. The exact solutions of equation (2) are obtained by putting \(\xi =x+y- \frac{v}{\beta }\left( t+\frac{1}{\Gamma \left( \beta \right) }\right) ^{\beta }\) to the solutions of equation (5) (Akbulut 2023; Akbulut et al. 2022).
Remark
The solutions we found here are special cases of the solutions we found with the generalized Kudryashov method.
Remark
Our methods are different from the other methods in the literature because of the selected auxiliary equations are different.
3 Application of the methods
In this part, the given methods will be applied to Eq. (1). If we apply (4) to Eq. (1), the following ODE is obtained:
3.1 Generalized Kudryashov method
Balancing the highest power nonlineer term \(U^{3}\) and the highest order derivative \(U^{\prime }\), \(m=1\) and \(n=2\) are obtained. Thus, using (6) the solution of (12) can be given as follows:
We substitute Eq. (13) in Eq. (12) and find a polynomial equation by substituting solution (7) for the result and set the coefficients \(a_{0},a_{1},a_{2},b_{0},b_{1},v,\alpha\) equal to zero and the following system of equations is obtained:
By solving these algebric equations system for \(a_{0},a_{1},a_{2},b_{0},b_{1},v\) and \(\alpha ,\) we obtain the following cases:
Set1
Substituting (14) into (3) without ignoring (13), we have the exact solution as follows:
Set2
Substituting (16) into (3) without ignoring (13), we have the exact solution as follows:
Set3
Substituting (18) into (3) without ignoring (13), we have the exact solution as follows:
Set4
Substituting (20) into (3) without ignoring (13), we have the exact solution as follows:
3.2 The modified Kudryashov method
Balancing the highest power nonlineer term \(U^{3}\) and the highest order derivative \(U^{\prime \prime }\), we obtain \(n=1.\) Using the method, the exact solution can be given as follows:
We substitute Eq. (22) in (12), and find a polynomial equation by substituting solution (10) for the result and set the coefficients \(a_{0},a_{1},v,\alpha\) equal to zero and we get the following system of equations:
By solving these algebric equations system for \(a_{0},a_{1},v\) and \(\alpha ,\) the following cases are obtained.
Set1
If we substitute (24) into (22), the exact solutions are obtained as follows:
Set2
If we substitute (26) into (22), the exact solutions are obtained as follows:
Set3
If we substitute (28) into (22), the exact solutions are obtained as follows:
4 Figures of the results
In this part, plots of some results are given for arbitrary constants. Plots are given as three-dimensional, two-dimensional, and contour plots.

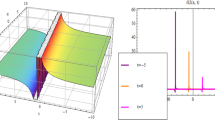
The dark wave of the Eq. (17) when \(A=0.8,\beta =0.5,\theta =1,v=1,y=0,a_{2}=1,b_{1}=1\)
Figure 1 represents dark wave. Also, Fig. 1d is given to see how the solution changes for different values of \(\beta\).

The soliton wave of the Eq. (19) when \(A=0.8,\beta =0.5,\theta =1,v=1,y=0,b_{1}=1\)
Figure 2 represents soliton wave. Also, Fig. 2d is given to see how the solution changes for different values of \(\beta\).

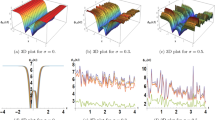
The kink wave of the Eq. (25) when \(A=0.1,\beta =0.7,\omega =0.2,\theta =1,v=3ln(2)+1,y=0\)
Figure 3 represents kink wave. Also, Fig. 3d is given to see how the solution changes for different values of \(\beta\).

The dark wave of the Eq. (27) when \(A=0.2,\beta =0.8,\omega =0.8,\theta =1,v=1,y=0\)
Figure 4 represents dark wave. Also, Fig. 4d is given to see how the solution changes for different values of \(\beta\).
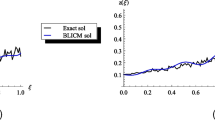
5 Stability properties
Stability analysis is an important research area for nonlinear evolution equations. It helps to study how a system responds to external influences and how it behaves over time. The stability property obtained using the properties of the Hamilton system is tested on some solutions to show the usability of the model in applications. In this part of the study, the stability features of the solutions obtained for Set 5 and Set 6 are examined with the help of the properties of the Hamilton system.
The momentum in the Hamiltonian system
where \(F\left( \xi \right)\) is the solution of the model and the essential circumstance for stability is formulated in the next form
where \(v_{0}\) are optional constants (Yue et al. 2020a, b).
(17) in solution
by using custom parameters their values
thus, the obtain
(27) in solution
by using custom parameters their values
thus, the obtain
As a result, this solution is stable. The same steps are applied to the next solutions obtained, and the stability feature of each is determined.
6 Conclusion
In this study, solutions of the local temporal fractional (2 + 1) dimensional Chaffee–Infante equation were obtained by generalized Kudryashov and modified Kudryashov methods. These two methods can be easily applied and offer different solutions compared to other methods in the literature. Since the methods are powerful and effective, the procedures used can be applied to different nonlinear differential equations. The generalized Kudryashov method produced four solutions, and the modified Kudryashov method produced 6 solutions. The resulting solutions are hyperbolic and rational functions. The obtained solutions were examined by stability test. As a result, the solutions are stable. 3D and 2D contour drawings were drawn for some families, and in these drawings, the graphs of soliton, kink, and dark solution were obtained. Maple software program was used to check the accuracy of the results. The CI equation provides a useful model for studying the diffusion of a gas in a uniform medium. In addition, ion-acoustic waves in plasma also play an important role in various scientific and technological fields, including fluid dynamics, plasma physics, signal processing through optical cables, sound waves, and electromagnetic waves. The results obtained have the potential to be useful in the fields of physics, mathematics and engineering.
Data availability
There is no data availability
References
Ablowitz, M.J., Clarkson, P.A.: Soliton, Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, New York (1991)
Akbar, M.A., Ali, N.H.M., Hussain, J.: Optical soliton solutions to the (2+1)-dimensional Chaffee–Infante equation and the dimensionless form of the Zakharov equation. Adv. Differ. Equ. 2019, 1–18 (2019)
Akbar, M.A., Akinyemi, L., Yao, S.W., Jhangeer, A., Rezazadeh, H., Khater, M.M.A., Ahmad, H., Inc, M.: Soliton solutions to the Boussinesq equation through sine-Gordon method and Kudryashov method. Res. Phys. 25, 104228 (2021)
Akbulut, A.: Obtaining the soliton type solutions of the conformable time-fractional complex Ginzburg-Landau equation with Kerr law nonlinearity by using two kinds of Kudryashov methods. J. Math. (2023). https://doi.org/10.1155/2023/4741219
Akbulut, A., Kaplan, M.: The analysis of the soliton-type solutions of conformable equations by using generalized Kudryashov method. Opt. Quant. Electron. 53, 498 (2021). https://doi.org/10.1007/s11082-021-03144-y
Akbulut, A., Arnous, A.H., Hashemi, M.S., Mirzazadeh, M.: Solitary waves for the generalized nonlinear wave equation in (3+1) dimensions with gas bubbles using the Nnucci’s reduction, enhanced and modified Kudryashov algorithms. J. Ocean Eng. Sci. (2022)
Akram, G., Sadaf, M., Zainab, I.: Effect of a new local derivative on space-time fractional nonlinear Schrödinger equation and its stability analysis. Opt. Quant. Electron. 55(9), 834 (2023a). https://doi.org/10.1007/s11082-023-05009-y
Akram, G., Arshed, S., Sadaf, M.: Soliton solutions of generalized time-fractional Boussinesq-like equation via three techniques. Chaos Solitons Fractals 173, 113653 (2023b). https://doi.org/10.1016/j.chaos.2023.113653
Akram, G., Arshed, S., Sadaf, M., Maqbool, M.: Comparison of fractional effects for Phi-4 equation using beta and M-truncated derivatives. Opt. Quant. Electron. 55(3), 282 (2023c). https://doi.org/10.1007/s11082-023-04549-7
Ali, M., Alquran, M., Jaradat, I.: Asymptotic-sequentially solution style for the generalized Caputo time-fractional Newell–Whitehead–Segel system. Adv. Differ. Equ. 2019(1), 1–9 (2019). https://doi.org/10.1186/s13662-019-2021-8
Al-Mdallal, Q.M., Syam, M.I.: Sine-Cosine method for finding the soliton solutions of the generalized fifth-order nonlinear equation. Chaos Solitons Fract. 33(5), 1610–1617 (2007)
Alquran, M.: The amazing fractional Maclaurin series for solving different types of fractional mathematical problems that arise in physics and engineering. Partial Differ. Equ. Appl. Math. 7, 100506 (2023a). https://doi.org/10.1016/j.padiff.2023.100506
Alquran, M.: Classification of single-wave and bi-wave motion through fourth-order equations generated from the Ito model. Phys. Scr. (2023b). https://doi.org/10.1088/1402-4896/ace1af
Arshed, S., Biswas, A., Alzahrani, A., Belic, M.R.: Solitons in nonlinear directional couplers with optical meta materials by first integral method. Optik 218, 165208 (2020). https://doi.org/10.1016/j.ijleo.2020.165208
Arshed, S., Akram, G., Sadaf, M., Bilal Riaz, M., Wojciechowski, A.: Solitary wave behavior of (2+1)-dimensional Chaffee–Infante equation. PLoS ONE 18(1), e027696 (2023)
Atangana, A., Baleanu, D., Alsaedi, A.: Analysis of time-fractional Hunter–Saxton equation: a model of neumatic liquid crystal. Open Phys. 14(1), 145–149 (2016)
Bekir, A.: Application of the \((G^{\prime }/G)\)-expansion method for nonlinear evolution equations. Phys. Lett. A 372(19), 3400–3406 (2008)
Biswas, A., Yildirim, Y., Yasar, E., Zhou, Q., Moshokoa, S.P., Belic, M.: Optical solitons for Lakshmanan–Porsezian–Daniel model by modified simple equation method. Optik 160, 24–32 (2018)
Bonyah, E., Gomez-Aguilar, J.F., Abu, A.: Stability analysis and optimal control of a fractional human African trypanosomiasis model. Chaos Soliton Fract. 117, 150–160 (2018)
Caraballo, T., Crauel, H., Langa, J., Robinson, J.: The effect of noise on the Chafee–Infante equation: a nonlinear case study. Proc. Am. Math. Soc. 135(2), 373–82 (2007)
Çelik, N.: Exact solutions of magneto-electro-elastic rod model with F expansion method. BEU J. Sci. 10(2), 375–392 (2021)
Das, A., Ghosh, N.: Bifurcation of traveling waves and exact solutions of Kadomtsev–Petviashvili modified equal width equation with fractional temporal evolution. Comput. Appl. Math. 38(1), 9 (2019)
Duran, S., Yokus, A., Durur, H., Kaya, D.: Refraction simulation of internal solitary waves for the fractional Benjamin–Ono equation in fluid dynamics. Mod. Phys. Lett. B 35(26), 2150363 (2021a)
Duran, S., Yokus, S.A., Durur, H.: Surface wave behavior and refraction simulation on the ocean for the fractional Ostrovsky–Benjamin–Bona–Mahony equation. Mod. Phys. Lett. B 35(31), 2150477 (2021b)
Ghanbari, B.: Abundant soliton solutions for the Hirota–Maccari equation via the generalized exponential rational function method. Mod. Phys. Lett. B 33(09), 1950106 (2019). https://doi.org/10.1142/S0217984919501069
Ghanbari, B.: New analytical solutions for the oskolkov-type equations in fluid dynamics via a modified methodology. Res. Phys. 28, 104610 (2021a). https://doi.org/10.1016/j.rinp.2021.104610
Ghanbari, B.: Employing Hirota’s bilinear form to find novel lump waves solutions to an important nonlinear model in fluid mechanics. Res. Phys. 29, 104689 (2021b). https://doi.org/10.1016/j.rinp.2021.104689
Ghanbari, B.: On the nondifferentiable exact solutions to Schamel’s equation with local fractional derivative on Cantor sets. Numer. Methods Partial Differ. Equ. 38(5), 1255–1270 (2022). https://doi.org/10.1002/num.22740
Ghanbari, B., Akgül, A.: Abundant new analytical and approximate solutions to the generalized Schamel equation. Phys. Scr. 95(7), 075201 (2020). https://doi.org/10.1088/1402-4896/ab8b27
Ghanbari, B., Baleanu, D.: New solutions of Gardner’s equation using two analytical methods. Front. Phys. 7, 202 (2019). https://doi.org/10.3389/fphy.2019.00202
Ghanbari, B., Baleanu, D.: New optical solutions of the fractional Gerdjikov–Ivanov equation with conformable derivative. Front. Phys. 8, 167 (2020). https://doi.org/10.3389/fphy.2020.00167
Ghanbari, B., Baleanu, D.: Abundant optical solitons to the (2+1)-dimensional Kundu–Mukherjee–Naskar equation in fiber communication systems. Opt. Quant. Electron. 55(13), 1133 (2023a). https://doi.org/10.1007/s11082-023-05457-6
Ghanbari, B., Baleanu, D.: Applications of two novel techniques in finding optical soliton solutions of modified nonlinear Schr ödinger equations. Res. Phys. 44, 106171 (2023b). https://doi.org/10.1016/j.rinp.2022.106171
Ghanbari, B., Gómez-Aguilar, J.F.: Optical soliton solutions for the nonlinear Radhakrishnan–Kundu–Lakshmanan equation. Mod. Phys. Lett. B 33(32), 1950402 (2019a). https://doi.org/10.1142/S0217984919504025
Ghanbari, B., Gómez-Aguilar, J.F.: New exact optical soliton solutions for nonlinear Schrödinger equation with second-order spatio-temporal dispersion involving M-derivative. Mod. Phys. Lett. B 33(20), 1950235 (2019b). https://doi.org/10.1142/S021798491950235X
Ghanbari, B., Kuo, C.K.: New exact wave solutions of the variable-coefficient (1+1)-dimensional Benjamin–Bona–Mahony and (2+1)-dimensional asymmetric Nizhnik–Novikov–Veselov equations via the generalized exponential rational function method. Eur. Phys. J. Plus 134(7), 334 (2019). https://doi.org/10.1140/epjp/i2019-12632-0
Ghanbari, B., Baleanu, D., Al Qurashi, M.: New exact solutions of the generalized Benjamin–Bona–Mahony equation. Symmetry 11(1), 20 (2018). https://doi.org/10.3390/sym11010020
Gomez-Aguilar, J.F., Ghanbari, B., Bonyah, E.: On the new fractional operator and application to nonlinear bloch system. Int. Workshop Math. Model Appl. Anal. Comput. 2018, 137–154 (2018)
Hashemi, M.S., Mirzazadeh, M.: Optical solitons of the perturbed nonlinear Schrödinger equation using Lie symmetry method. Optik Int. J. Light Electron Opt. 281, 170816 (2023)
Hassani, H., Machado, J.T., Naraghirad, E., Sadeghi, B.: Solving nonlinear systems of fractional-order partial differential equations using an optimization technique based on generalized polynomials. Comput. Appl. Math. 39, 1–19 (2020)
Helal, M.A., Mehana, M.S.: A comparison between two different methods for solving Modified KdV Burgers equation. Chaos Solitons Fract. 28, 320–326 (2006)
Hosseini, K., Osman, M.S., Mirzazadeh, M., Rabie, F.: Investigation of different wave structures to the generalized third-order nonlinear Schr ödinger equation. Optik 206, 164259 (2020)
Islam, M.T., Akter, M.A.: Further fresh and general traveling wave solutions to some fractional order nonlinear evolution equations in mathematical physics. Arab J. Math. Sci. 26(1), 5 (2020). https://doi.org/10.1108/AJMS-09.2020-0078
Jaradat, I., Alquran, M.: Construction of solitary two-wave solutions for a new two-mode version of the Zakharov–Kuznetsov equation. Mathematics 8(7), 1127 (2020). https://doi.org/10.3390/math8071127
Jaradat, I., Alquran, M.: A variety of physical structures to the generalized equal-width equation derived from Wazwaz–Benjamin–Bona–Mahony model. J. Ocean Eng. Sci. 7(3), 244–247 (2022). https://doi.org/10.1016/j.joes.2021.08.005
Jaradat, I., Alquran, M., Ali, M.: A numerical study on weak-dissipative two-mode perturbed Burgers’ and Ostrovsky models: right–left moving waves. Eur. Phys. J. Plus 133, 1–6 (2018). https://doi.org/10.1140/epjp/i2018-12026-x
Jianming, L., Jie, D., Wenjun, Y.: Backlund transformation and new exact solutions of the Sharma–Tasso–Olver equation. Abstr. Appl. Anal. 2011, 935710 (2011)
Khater, M., Ghanbari, B.: On the solitary wave solutions and physical characterization of gas diffusion in a homogeneous medium via some efficient techniques. Eur. Phys. J. Plus 136(4), 1–28 (2021). https://doi.org/10.1140/epjp/s13360-021-01457-1
Kilbas, A., Srivastava, M.H., Trujillo, J.J.: Theory and Application of Fractional Differential Equations, vol. 204. Elsevier, Amsterdam (2006)
Kudryashov, N.A.: One method for finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 17(6), 2248–2253 (2012)
Kudryashov, N.A.: First integrals and general solution of the complex Ginzburg–Landau equation. Appl. Math. Comput. 386, 125407 (2020)
Kudryashov, N.A.: Optical solitons of the perturbation Fokas–Lenells equation by two different integration procedures. Optik Int. J. Light Electron Opt. 273, 170382 (2023)
Mahmood, A., Abbas, M., Akram, G., Sadaf, M., Riaz, M.B., Abdeljawad, T.: Solitary wave solution of (2+ 1)-dimensional Chaffee–Infante equation using the modified Khater method. Res. Phys. 48, 106416 (2023). https://doi.org/10.1016/j.rinp.2023.10
Mao, Y.: Exact solutions to (2+1)-dimensional Chaffee–Infante equation. Pramana 91(1), 9 (2018)
Miller, K.S., Ross, B.: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York (1993)
Mohyud-Din, S.T., Noor, M.A., Noor, K.I.: Modified variational iteration method for solving Sine-Gordon equations. World Appl. Sci. J. 6, 999–1004 (2009)
Park, C., Khater, M.M.A., Abdel-Aty, A.H., Attifa, R.A.M., Rezazadeh, H., Zidan, A.M., Mohamed, A.B.A.: Dynamical analysis of the nonlinear complex fractional emerging telecommunication model with higher-order dispersive cubic-quintic. Alex. Eng. J. 59, 1425–1433 (2020)
Qiang, L., Yun, Z., Yuanzheng, W.: Qualitative analysis and travelling wave solutions for the Chaffee–Infante equation. Rep. Math. Phys. 71(2), 177–93 (2013)
Raza, N., Aslam, M.R., Rezazadeh, H.: Analytical study of resonant optical solitons with variable coefficients in Kerr and non-Kerr law media. Opt. Quant. Electron. 51, 59 (2019)
Raza, N., Rafiq, M.H., Kaplan, M., Kumar, S., Chu, Y.M.: The unified method for abundant soliton solutions of local time fractional nonlinear evolution equations. Res. Phys. 22, 103979 (2021)
Riaz, M.B., Atangana, A., Jhangeer, A., Junaid-U-Rehman, M.: Some exact explicit solutions and conservation laws of Chaffee–Infante equation by Lie symmetry analysis. Phys. Scr. 96(8), 084008 (2021)
Sadaf, M., Arshed, S., Akram, G., Ali, M.R., Bano, I.: Analytical investigation and graphical simulations for the solitary wave behavior of Chaffee–Infante equation. Res. Phys. 54, 107097 (2023a). https://doi.org/10.1016/j.rinp.2023.107097
Sadaf, M., Akram, G., Arshed, S., Sabir, H.: Optical solitons and other solitary wave solutions of (1+1)-dimensional Kudryashov’s equation with generalized anti-cubic nonlinearity. Opt. Quant. Electron. 55(6), 529 (2023b). https://doi.org/10.1007/s11082-023-04783-z
Sakthivel, R., Chun, C.: New soliton solutions of Chaffee–Infante equations using the Exp-function method. Zeitschrift für Naturforschung A 65(3), 197–202 (2010)
Samko, G., Kilbas, A.A., Marichev, O.I.: Fractional Integrals and Derivatives. Theory and Applications. Gordon and Breach Science Publishers, Switzerland, Philadelphia, PA, USA (1993)
Seadawy, A.R.: Traveling-wave solution of a weakly nonlinear two-dimensional higher-order Kadomtsev Petviashvili dynamical equation for dispersive shallow-water waves. Eur. Phys. J. plus. 132, 29 (2017)
Sriskandarajah, K., Smiley, M.W.: The global attractor for a Chafee–Infante problem with source term. Nonlinear Anal. Theory Methods Appl. 27(11), 1315–27 (1996)
Tian, H., Niu, Y., Ghanbari, B., Zhang, Z., Cao, Y.: Integrability and high-order localized waves of the (4+1)-dimensional nonlinear evolution equation. Chaos Solitons Fractals 162, 112406 (2022). https://doi.org/10.1016/j.chaos.2022.112406
Wang, K.J.: On the generalized variational principle of the fractal Gardner equation. Fractals (2023a). https://doi.org/10.1142/S0218348X23501207
Wang, K.J.: New exact solutions of the local fractional modified equal width-Burgers equation on the Cantor sets. Fractals (2023b). https://doi.org/10.1142/S0218348X23501116
Wang, K.J.: Soliton molecules and other diverse wave solutions of the (2+1)-dimensional Boussinesq equation for the shallow water. Eur. Phys. J. Plus. 138(10), 1–12 (2023c). https://doi.org/10.1140/epjp/s13360-023-04521-0
Wang, K.J.: Dynamics of breather, multi-wave, interaction and other wave solutions to the new (3+1)-dimensional integrable fourth-order equation for shallow water waves. Int. J. Numer. Methods Heat Fluid Flow (2023d). https://doi.org/10.1108/HFF-07-2023-0385
Wang, K.J.: Resonant multiple wave, periodic wave and interaction solutions of the new extended (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation. Nonlinear Dyn. 111(17), 16427–16439 (2023e). https://doi.org/10.1007/s11071-023-08699-x
Wang, K.J.: Diverse wave structures to the modified Benjamin–Bona–Mahony equation in the optical illusions field. Mod. Phys. Lett. B 37(11), 2350012 (2023f). https://doi.org/10.1142/S0217984923500124
Wang, K.J., Shi, F.: A new fractal model of the convective-radiative fins with temperature-dependent thermal conductivity. Therm. Sci. 00, 207–207 (2022). https://doi.org/10.2298/TSCI220917207W
Wang, K.J., Xu, P.: Generalized variational structure of the fractal modified KdV–Zakharov–Kuznetsov equation. Fractals 31(07), 2350084 (2023). https://doi.org/10.1142/S0218348X23500846
Wang, K.J., Xu, P., Shi, F.: Nonlinear dynamic behaviors of the fractional (3+1)-dimensional modified Zakharov–Kuznetsov equation. Fractals 31(07), 2350088 (2023a). https://doi.org/10.1142/S0218348X23500883
Wang, K.J., Wang, G.D., Shi, F.: The pulse narrowing nonlinear transmission lines model within the local fractional calculus on the Cantor sets. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. (2023b). https://doi.org/10.1108/COMPEL-11-2022-0390
Wang, K.J., Wang, G.D., Shi, F.: Diverse optical solitons to the Radhakrishnan–Kundu–Lakshmanan equation for the light pulses. J. Nonlinear Opt. Phys. Mater. (2023c). https://doi.org/10.1142/S0218863523500741
Wazwaz, A.M.: A Sine–Cosine method for handling nonlinear wave equations. Math. Comput. Model. 40(5–6), 499–508 (2004)
Yang, H.W., Guo, M., He, H.: Conservation laws of space-time fractional mZK equation for Rossby solitary waves with complete Coriolis force. Int. J. Nonlinear Sci. Numer. Simul. 20, 1–16 (2019)
Yokus, A.: Numerical solution for space and time fractional order Burger type equation. Alex. Eng. J. 57, 2085–2091 (2018)
Yue, C., Khater, M.M.A., Attia, R.A.M., Lu, D.: The plethora of explicit solutions of the fractional KS equation through liquid–gas bubbles mix under the thermodynamic conditions via Atangana–Baleanu derivative operator. Adv. Differ. Equ. 2020, 62 (2020a). https://doi.org/10.1186/s13662-020-2540-3
Yue, C., Elmoasry, A., Khater, M.M.A., Osman, M.S., Attia, R.A.M., Lu, D., Elazab, N.S.: On complex wave structures related to the nonlinear long–short wave interaction system: analytical and numerical techniques. AIP Adv. (2020b). https://doi.org/10.1063/5.0002879
Zubair, A., Raza, N., Mirzazadeh, M., Liu, W., Zhou, Q.: Analytic study on optical solitons in parity-time symmetric mixed linear and nonlinear modulation lattices with non-Kerr nonlinearities. Optik 173, 249–262 (2018)
Acknowledgements
The authors declare that no funds were received during the preparation of this manuscript.
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK). The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
All of the authors prepared the paper together checked the results.
Corresponding author
Ethics declarations
Competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Tetik, D., Akbulut, A. & Çelik, N. Applications of two kinds of Kudryashov methods for time fractional (2 + 1) dimensional Chaffee–Infante equation and its stability analysis. Opt Quant Electron 56, 640 (2024). https://doi.org/10.1007/s11082-023-06271-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-023-06271-w