
Abstract
The nonlinear (4+1)-dimensional Fokas equation (FE) has been demonstrated to be the integrable extension of the Kadomtsev–Petviashvili (KP) and Davey–Stewartson (DS) equations. In nonlinear wave theory, the governing model is one of the fundamental structures that explains the surface waves and interior waves in straits or channels with different depths and widths. In this study, the generalized unified approach, the generalized projective ricatti equation technique, and the new F/G-expansion technique are applied to investigate the higher dimensional nonlinear model analytically. As a result, several solutions are successfully achieved, including dark soliton, periodic type solitons, w-shaped soliton, and single-bell shaped solitons. Along with an explanation of their behavior, we also display a few of the equation’s exact solutions graphically. The results demonstrate the effectiveness and simplicity of the approaches mentioned in this article, demonstrating their applicability to a wide range of additional nonlinear evolution issues in numerous scientific and technical disciplines.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear partial differential equations (PDEs) are used to study a variety of physics and geometry problems. Numerous researchers, including engineers, chemists, mathematicians, physicists, and others, are interested in these nonlinear structures because they can be used to model a variety of real-world nonlinear problems. A wide range of natural and applied sciences use PDEs, including mathematical finance (An et al. 2021), biology (Friedman 2012), shallow water waves (Seadawy et al. 2017), fluid dynamics (Samuel et al. 2021), solid state physics, plasma physics, acoustics, and optical fibers (Rehman et al. 2022). The study of nonlinear physical structures is becoming extensively crucial and fascinating topic in the field of contemporary science. Currently, a number of prominent mathematicians and scientists are interested in the dynamical structures of many higher dimensional nonlinear models arising in diverse disciplines of science and engineering, which is expanding exponentially, such as Nasreen et al. (2023a, b, c, d, e), Ismael and Younas (2023), Seadawy et al. (2020).
The development of solitary wave solutions for nonlinear structures is of key importance to study the dynamics many crucial models arising in contemporary science and engineering, a number of analytical and numerical techniques have been developed. The bilinear transformation (Xu and Chow 2016), the Hirota bilinear, the extended trail function (Gepreel 2016), the tanh-coth expansion (Rani et al. 2021), the sub ODE (Yang et al. 2015), the extended Sinh-Gordon equation (Kumar et al. 2018), the first integral (Javeed et al. 2019), the extended simplest equation (Bilige et al. 2013), the modified Khater technique (Khater et al. 2021), new Kudryashov approach (Akinyemi et al. 2021), the modified direct algebraic method (Seadawy et al. 2020), the generalized auxiliary equation approach (Akinyemi et al. 2022), the generalized Riccati equation method (Lu et al. 2019), the modified simple equation method (Rasheed et al. 2021), the Lie symmetry approach (Sahoo et al. 2017), the extended Tanh method (Zahran and Khater 2016), the homogeneous balance methods Song and Liu (2022), the modified expansion method (Islam et al. 2023), the generalized Kudryashov scheme (Akbar et al. 2022), the rational \(\left( 1/\phi '(\xi )\right) \)-expansion method (Islam et al. 2022), the rational \(\left( G'/G\right) \)-expansion scheme (Islam et al. 2022), the modified \(\left( 1/G'\right) \) -expansion method (Yokus et al. 2022), among others, have all been found in current decades using illustrative computation and many more (Akbar et al. 2023; Islam et al. 2023, 2022, 2023; Ozdemir et al. 2022).
This study aims to obtain travelling and solitary waves solutions to the nonlinear \((4+1)\)-dimensional Fokas dynamical equation using three effective methods: the generalised unified technique (Rafiq et al. 2022), the generalised projective Riccati equation technique (Akram et al. 2021), and the new F/G-expansion technique (Mortazavi and Gachpazan 2016). Consider the nonlinear (4+1)-dimensional FE (Ullah et al. 2022) which reads
where \(u=u(x,y,z,w,t)\) is a wave profile and velocity. Assume that this general Eq. (1) is used to represent the wave gesture in multidimensional broadcasting. It depicts the external wave’s distortion or dispersion. As a result, numerous sorts of Fokas equation solutions will provide us with suggestions for instructing the complex system of DS and KD models.
The FE model characterizes the internal and surface waves in rivers with varying physical conditions is being investigated by a number of researchers with the aid of various analytical techniques. For instance, Shahzad Sarwar used the generalised \(\exp (-\phi )\)-expansion technique and improved F-expansion technique to obtain the exact wave solutions of this model (Sarwar 2021). Investigations on travelling wave solutions and sensitivity analysis Three different approaches, including the modified Kudryashove approach, the modified extended tanh-function approach, and the exponential rational function approach, are used in this model by Kaplan et al. (2022). Finding the exact solutions to these models is therefore essential, and the literature has provided a number of effective methods for resolving these kinds of equations. As far as we know, the generalised unified method, the generalised projective ricatti equation technique, and the new F/G-expansion technique have not been used to solve the considered model in the literature.
This paper is organized as follows: In Sect. 2, a detail description of the proposed techniques is shown, while Sect. 3 is devoted to the applications of the two proposed techniques to the governing model Eq. (1). However Sect. 4 contains discussion and results also Sect. 5 contains conclusions.
2 Description of techniques
Suppose the NPDE in the following form,
where F is a polynomial function in its argument. Also \(\phi \) is a wave function of the variables x, y, z and t. Suppose the wave transformation of form,
Putting Eq. (3) into Eq. (2), gives an ODE of the form,
2.1 Description of the generalized unified technique
This section contains the key ideas of the generalized unified method. The major process of approach are outlined below,
Step 1. Using the unified method, the obtained solutions of Eq. (4) are classed as polynomial or rational function solutions.
2.1.1 The polynomial function solution
The unified method indicates that in order to acquire the polynomial function solutions of Eq. (4),
where \(j=1,2,\cdots ,m,~p=1,2, p_i,b_i,\alpha _0,\alpha _s\) are to be determined later constants. It’s worth noting that in ODE Eq. (4), n and k are found by using the balancing principle between the higher derivative and higher power. A second criterion (the consistency requirement) is also employed, which states that the arbitrary function in Eq. (5) may be found consistently. When \(p=1\), Eq. (5) yields elementary solutions (explicit or implicit), however when \(p=2\), it yields elliptic solutions.
2.1.2 The rational function solution
To get the polynomial function solutions of Eq. (4), unified method suggests that
where \(j=1,2,\cdots ,m, ~~p=1,2, p_i,b_i,\alpha _0,\alpha _s\) are constants to be determined later. It is worth to be noticing that, n, r and k are determined by using the balancing principle between the higher derivative and higher power in ODE Eq. (4). Also, a second condition(the consistency condition), which asserts that the arbitrary function in Eq. (6) could be consistently determined, is used. When \(p=1\), Eq. (6) solves to elementary solutions(explicit or the implicit solutions) while when \(p=2\), it solves to elliptic solutions.
2.2 Description of the generalized projective Riccati equation technique
Step 1:Suppose that Eq. (4) has solution of the form,
where \(A_0\), \(A_i\), \(B_i \) are constants to be determined. The function \(\Omega (\eta )\) and \(\gamma (\eta )\) satisfies the ODE:
also
where \(r_1=\pm 1\), \(R_1\) and M are non zero constants.
If \(R_1=M=0\) Eq. (4) has the formal solution:
where \(\gamma (\eta )\) satisfies the ODE:
Step 2: The positive integer N in Eq. (4) can be determined by using the balancing principle.
Step 3. Putting Eq. (7) combined with Eq. (8–10) into Eq. (4) or Eq. (11) along with Eq. (12) into Eq. (4), we have a polynomial in \(\Omega ^j(\eta )\gamma ^i(\eta ) \). Collecting all coefficients of the same \(\Omega ^j(\eta )\gamma ^i(\eta )\) \((j=0,1,2,\cdots ;i=0,1,2,\cdots )\) together and setting all of the terms equals to zero, we get group of the algebraic equations, whose solutions yields the values of \(A_0, A_i, B_i, \mu , \rho , R_1\).
Step 4. Equation (8–9) admits the following solutions:
Family I. If \(k=-1,r_1=-1\), \(R_1>0\), we have
Family II. If \(k=-1,r_1=1\), \(R_1>0\), we have
Family III. If \(k=1,r_1=-1\), \(R_1>0\), we have
Family IV. If \(R_1=M=0\), we have
Putting the values of \(A_0, A_i, B_i, \mu , \rho , R_1\) and using the Eqs. (13–16), the solutions of Eq. (2) can be obtained.
2.3 Description of the new F/G-expansion technique
The major process of F/G-expansion technique are outlined below,
Step 1. The solution of Eq. (4) is then assumed and may be written a polynomial in (F/G) as follows,
where \(G=G (\eta )\) and \(F=F (\eta )\) satisfy
\(A_0,A_1,...,A_m\), \(\lambda \) and \(\mu \) are constant to be calculated later, \(a_m\ne 0\).
Step 2. Furthermore, N is positive integer that can be calculated by using the homogeneous balance principle between the higher derivatives and nonlinear terms in ODE Eq. (4). We may get the following solutions of \(F(\eta )\) and \(G(\eta )\), with the help of Eq. (18), which are listed as below,
Case I. If \(\lambda>0, \mu >0\), we get hyperbolic function solution.
Case II. If \(\lambda<0, \mu <0\), we get hyperbolic function solution.
Case III. If \(\lambda >0, \mu <0\), we get trignomatric function solution.
Case IV. If \(\lambda <0, \mu >0\), we get trignomatric function solution.
Step 3. Puting Eqs. (17, 18) in Eq. (4) a group of algebraic equations for\(\left( \frac{F}{G}\right) ^i\) \((i = 1, 2,..., m)\) is obtained. Setting all \(\left( \frac{F}{G}\right) ^i\) to zero and solving these nonlinear algebraic equations by using Mathematica, we get different accurate solutions of Eq. (2) according to Eqs. (18–22).
3 Mathematical analysis
The main purpose of this part is to obtain the exact solutions of the (4+1)-dimensional Fokas Eq. (1). We apply the transformation as follows
substituting values from Eq. (23) to Eq. (1) and we get the following form of ODE,
Integrating twice Eq. (24) w.r.t \((\eta )\), then
3.1 Application to the generalized unified method
3.1.1 The polynomial function solutions
To find the polynomial function solutions of the NFE, we assume that
By considering the homogenous balance principle in Eq. (25), we get
\(N=2(k-1)\), \(k=2,3,\cdots \) Here we confine ourselves to find these solutions when \(k=2\) and \(p=1\) or \(p=2\). So, we suppose that the polynomial function solution of the ODE Eq. (25) is of the form
3.1.2 The solitary wave solutions
To obtain such type of solutions, we put \(p=1\) in auxiliary equation given in Eq. (27), then
Substituting Eq. (28) and its necessary derivatives into Eq. (25) and gathering all same powers terms of \(\phi (\eta )\). Setting each \(\phi (\eta )\) polynomial equal to zero yields the following group of algebraic group of equations,
Using computer software Mathematica to solve the above algebraic group of equations. The following are the outcomes,
Family 1: Set 1.
Solving the auxiliary equation Eq. (29) and substituting together with the above results into Eq. (28), produces following categories of traveling wave solutions.
where \(\eta =-\frac{\alpha _1 w \left( -4 \nu +\alpha _2^3 \left( -R_1(t){}^2\right) +\alpha _1^2 \alpha _2 R_1(t){}^2\right) }{6 \alpha _3}+\nu t+\alpha _1 x+\alpha _2 y+\alpha _3 z+\epsilon \).
Set 2.
where \(\eta =\nu t+\frac{2 \alpha _1 \nu w}{3 \alpha _3}+\alpha _1 x+\alpha _3 z+\epsilon \).
3.1.3 The soliton wave solutions
To obtain such type of solutions, we put \(p=2\) in auxiliary equation given in Eq. (27), then
Substituting Eq. (32) and its necessary derivatives into Eq. (25) and gathering all same powers terms of \(\phi (\eta )\). Setting each \(\phi (\eta )\) polynomial equal to zero yields the following group of algebraic group of equations,
On solving the above algebraic group of equations, the outcomes are,
Set 1.
Solving the auxiliary equation Eq. (33) and substituting together with the above results into Eq. (32), produces following categories of traveling wave solutions.
Set 2.
where \(\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{\alpha _1 w \left( \alpha _2^3 b_1(t){}^2-\alpha _1^2 \alpha _2 b_1(t){}^2+16 \nu b_2(t)\right) }{24 \alpha _3 b_2(t)}+\epsilon \).
3.1.4 The eliptic wave solutions
To obtain such type of solutions, we put \(p=2\) in auxiliary equation given in Eq. (27), then
Substituting Eq. (36) and its necessary derivatives into Eq. (25) and gathering all same powers terms of \(\phi (\eta )\). Setting each \(\phi (\eta )\) polynomial equal to zero yields the following group of algebraic group of equations. On solving the obtained algebraic group of equations, the outcomes are,
Eq. (37) possesses different Jacobi elliptic function solutions for different choices of \(b_i(t)\), \(i=0,2,4\). According to the classification (), we choose,
that yields a special case solution of Eq. (37) takes the form, \(\phi (\eta )=\frac{k \text {cn}(\eta ,k) \text {dn}(\eta ,k)}{\text {ksn}^2(\eta ,k)+1}\) and the general solution of Eq. (1) is,
where
We mention that \(0<k<1\) is called the modulus of the Jacobi elliptic functions. When \(k\rightarrow 0\), \(sn(\eta )\), \(cn(\eta )\) and \(dn(\eta )\) degenerate to \(\text {sin}(\eta )\), \(\text {cos}(\eta )\) and 1. While when \(k\rightarrow 1\), \(sn(\eta )\), \(cn(\eta )\) and \(dn(\eta )\) degenerate to \(\text {tanh}(\eta )\), \(\text {sech}(\eta )\) and \(\text {sech}(\eta )\) respectively.
3.2 The rational solutions
To find the rational function solutions of the (4+1)-dimensional Fokas equation, we assume that
By considering the homogenous balance principle in Eq. (25), we get
\(N-r=2(k-1)\), \(k=1,2,3,\cdots \) Here we fined these solutions when \(k=1\) so \(N=r\) and \(p=2\). So from Eq. (39), we have two cases as follow
3.2.1 Case 1: the periodic type solutions
In this case, we assume that
Substituting Eq. (40) and its necessary derivatives into Eq. (25) and gathering all same powers terms of \(\phi (\eta )\). Setting each \(\phi (\eta )\) polynomial equal to zero yields the following group of algebraic group of equations. On solving the obtained algebraic group of equations, the outcomes are,
By solving the auxiliary equation \(\phi '(\eta )=\sqrt{b_0(t){}^2-b_2(t){}^2 \phi (\eta )^2}\) and substituting together with the obtained outcomes in Eq. (40), we get the solution of Eq. (1)
where
set 2.
where
3.2.2 The soliton type solutions
In this case, we assume that
Substituting Eq. (43) and its necessary derivatives into Eq. (25) and gathering all same powers terms of \(\phi (\eta )\). Setting each \(\phi (\eta )\) polynomial equal to zero yields the following group of algebraic group of equations. On solving the obtained algebraic group of equations, the outcomes are.
Set 1.
By solving the auxiliary equation \(\phi '(\eta )=\sqrt{b_2(t) \phi (\eta )^2+b_1(t) \phi (\eta )+b_0(t)}\) and substituting together with the obtained outcomes in Eq. (40), we get the solution of Eq. (1)
where
3.3 Application to the generalized projective riccati equation method
By using the homogeneous balance rule we obtain the balancing term \(N = 2\).
Thus solution of Eq. (25), of the form
where \(A_0\), \(A_1\), \(A_2\), \(B_1\) and \(B_2\) are constants to be found by substituting Eq. (45) with Eqs. (8–10) into Eq. (25) and gathering all same powers terms of \(\Omega ^j(\eta )\gamma ^i(\eta )\) \((j=0,1,2,\cdots ;i=0,1,2,\cdots )\)together and setting all the obtained coefficients equals to be zero, we get the group of algebraic equations.
Family 1:
Putting \(k= -1\) and \(r_1=-1\) in obtained system of equations. Then by using Mathematica software to solve the obtained group of equations. The following are the outcomes,
Set 1.
Set 2.
Putting above results into Eq. (45), produces following categories of traveling wave solutions.
where
Family 2.
Putting \(k= -1\) and \(r_1=1\) in obtained system of equations. Then by using Mathematica software to solve the obtained group of equations. The following are the outcomes,
Set 1.
Putting above results into Eq. (45), produces following categories of traveling wave solutions.
Set 2.
Putting above results into Eq. (45), produces following categories of traveling wave solutions.
where
Family 3:
Putting \(k= 1\) and \(r_1=-1\) in obtained system of equations. Then by using Mathematica software to solve the obtained group of equations. The following are the outcomes,
Set 1.
Putting above results into Eq. (45), produces following categories of traveling wave solutions.
where
3.4 Application to the new F/G-expansion method
By using the homogeneous balance rule we obtain the balancing term \(N = 2\).
Thus solution of Eq. (25), of the form
where \(A_0\), \(A_1\), \(A_2\) are constants to be found by substituting Eq. (52) with Eq. (18) into Eq. (25) and gathering all same powers terms of \(\frac{F(\eta )}{G(\eta )}\) together and setting all the obtained coefficients equals to be zero, we get the group of algebraic equations.
Using computer software Mathematica to solve the above algebraic group of equations. The following are the outcomes,
Family 1: Set 1.
Putting above results into Eq. (52), produces following categories of traveling wave solutions.
Case 1. When \(\lambda>0, \mu >0\), we get hyperbolic function solution.
where \(\eta =\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{2 w \left( \alpha _2 \alpha _1^3 \lambda \mu -\alpha _2^3 \alpha _1 \lambda \mu +\alpha _1 \nu \right) }{3 \alpha _3}+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case II. When \(\lambda<0, \mu <0\), we get hyperbolic function solution.
where \(\eta =\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{2 w \left( \alpha _2 \alpha _1^3 \lambda \mu -\alpha _2^3 \alpha _1 \lambda \mu +\alpha _1 \nu \right) }{3 \alpha _3}+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case III. When \(\lambda >0, \mu <0\), we get trigonometric function solution.
where \(\eta =\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{2 w \left( \alpha _2 \alpha _1^3 \lambda \mu -\alpha _2^3 \alpha _1 \lambda \mu +\alpha _1 \nu \right) }{3 \alpha _3}+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case IV. When \(\lambda <0, \mu >0\), we get trigonometric function solution.
where \(\eta =\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{2 w \left( \alpha _2 \alpha _1^3 \lambda \mu -\alpha _2^3 \alpha _1 \lambda \mu +\alpha _1 \nu \right) }{3 \alpha _3}+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Family II: We have following results in family II:
Putting above results into Eq. (52), produces following categories of traveling wave solutions.
Case 1. When \(\lambda>0, \mu >0\), we get hyperbolic function solution.
where \(\eta =\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{2 w \left( \alpha _2 \alpha _1^3 \lambda \mu -\alpha _2^3 \alpha _1 \lambda \mu +\alpha _1 \nu \right) }{3 \alpha _3}+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case II. When \(\lambda<0, \mu <0\), we get hyperbolic function solution.
where \(\eta =\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{2 w \left( \alpha _2 \alpha _1^3 \lambda \mu -\alpha _2^3 \alpha _1 \lambda \mu +\alpha _1 \nu \right) }{3 \alpha _3}+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case III. When \(\lambda >0, \mu <0\), we get trigonometric function solution.
where \(\eta =\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{2 w \left( \alpha _2 \alpha _1^3 \lambda \mu -\alpha _2^3 \alpha _1 \lambda \mu +\alpha _1 \nu \right) }{3 \alpha _3}+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case IV. When \(\lambda <0, \mu >0\), we get trigonometric function solution.
where \(\eta =\alpha _1 x+\alpha _2 y+\alpha _3 z+\nu t+\frac{2 w \left( \alpha _2 \alpha _1^3 \lambda \mu -\alpha _2^3 \alpha _1 \lambda \mu +\alpha _1 \nu \right) }{3 \alpha _3}+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Family III: We have following results in family III:
Putting above results into Eq. (52), produces following categories of traveling wave solutions.
Case 1. When \(\lambda>0, \mu >0\), we get hyperbolic function solution.
where \(\eta =\nu t+\frac{2 \alpha _1 \nu w}{3 \alpha _3}+\alpha _1 x+\alpha _2 y+\alpha _3 z+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case II. When \(\lambda<0, \mu <0\), we get hyperbolic function solution.
where \(\eta =\nu t+\frac{2 \alpha _1 \nu w}{3 \alpha _3}+\alpha _1 x+\alpha _2 y+\alpha _3 z+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case III. When \(\lambda >0, \mu <0\), we get trigonometric function solution.
where \(\eta =\nu t+\frac{2 \alpha _1 \nu w}{3 \alpha _3}+\alpha _1 x+\alpha _2 y+\alpha _3 z+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
Case IV. When \(\lambda <0, \mu >0\), we get trigonometric function solution.
where \(\eta =\nu t+\frac{2 \alpha _1 \nu w}{3 \alpha _3}+\alpha _1 x+\alpha _2 y+\alpha _3 z+\epsilon \), \( C_1\) and \( C_2 \) are arbitrary constants.
If \(C_1=0\), then we obtain the solitary wave solution,
4 Discussion and results
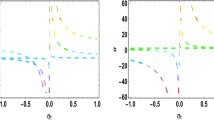
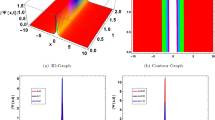
This section contain the graphical representation of some new exact solitary and traveling wave solutions of the NFE have been illustrated. The software Mathematica 11.0 is used to describe the behaviour of waves as a function of numerous factors. The 3D, contour and 2D graphs visualizes the nature of nonlinear wave solutions constructed from Eq. (1). To demonstrate the solutions by the considered approaches is observed for the Family-I, Family-II, Family-III. The Figs. 1, 2, 3, 5, 6) represents periodic type soliton for the set of appropriate values \(b_0(t)=-2.23,b_2(t)=2.016, b_1(t)=-1.11, p_0(t)=1.24, y=1, \alpha _1=-1.43, \alpha _2=-2, \alpha _3=-1.1, R_1(t)=-1.13,\nu =-0.31,\epsilon =1, z=-1.12,w=-0.13, t=1\) and \(b_0(t)=1.3,b_2(t)=-1.6, b_1(t)=-2.1, y=1, \alpha _1=1.12, \alpha _2=2, \alpha _3=0.1, R_1(t) =-0.3,\nu =0.1,\epsilon =1, z=-1.1,w=-3, t=1\) and \(b_0(t)=1.3,~b_2(t)=-1.6, ~b_1(t)=-3.1, ~y=1, ~\alpha _1=1.12, ~\alpha _2=2, ~\alpha _3=0.1, ~R_1(t) =-3.1,~\nu =2.1,~\epsilon =1, ~z=-1.1,~w=-3, ~t=1\) and \(M=-1.3,~\alpha _1=-2.1, ~\alpha _2=-1.002, ~y=2, ~\alpha _3=-1.1, ~\nu =-1.1,~\epsilon =1, ~z=0.1,~w=-1.3, ~\rho =-2.3, ~t=1\) and \(M=-1.3,~\alpha _1=-2.1, ~\alpha _2=-1.002, ~y=2, ~\alpha _3=-1.1, ~\nu =-1.1,~\epsilon =1, ~z=0.1,~w=-1.3, ~\rho =-2.3, ~t=1\). The Figs. 4, 8 represents singular bell and periodic shaped soliton for \(M=-0.3,~\alpha _1=-1.1, ~\alpha _2=-2.2, ~y=2, ~\alpha _3=-0.1, ~\nu =0.1,~\epsilon =1, ~z=1.1,~w=-3, ~\rho =1.3, ~t=1\) and \(\lambda =-1.1,~\mu =-2.2, ~\nu =-3.2, ~y=1, ~\alpha _1=0.3, ~\alpha _2=1.03, ~\alpha _3=0.1, ~\rho =-1.1, ~\epsilon =1, ~z=-1.3,~w=-0.1, ~t=1\). The Fig. 7 represents W-shaped soliton structure for the set of appropriate values \(\lambda =1.5,~\mu =1.1, ~\nu =-1.2, ~y=1, ~\alpha _1=0.3, ~\alpha _2=1.03, ~\alpha _3=1.001, ~\rho =-1.1, ~\epsilon =1, ~z=-1.003,~w=-0.1, ~t=1\). The Figs. 9, 10 represents dark shaped soliton for the set of appropriate values \(\lambda =4.11,~\mu =0.04, ~\nu =0.2, ~y=1, ~\alpha _1=-1.3, ~\alpha _2=-0.03, ~\alpha _3=0.11, ~\rho =0.11, ~\epsilon =0.11, ~z=1.003,~w=-1.1, ~t=1\) and \(\lambda =-2.003,~\mu =-1.07, ~\nu =0.002, ~y=1, ~\alpha _1=-1.3, ~\alpha _2=-0.03, ~\alpha _3=1.1, ~\rho =0.11, ~\epsilon =0.11, ~z=-0.003,~w=-1.1, ~t=1\).

The graphs of \(u_{2}(x,y,z,w,t)\) of Eq. (31). Values chosen are \(b_0(t)=-2.23,~b_2(t)=2.016, ~b_1(t)=-1.11, ~p_0(t)=1.24, ~y=1, ~\alpha _1=-1.43, ~\alpha _2=-2, ~\alpha _3=-1.1, ~R_1(t) =-1.13,~\nu =-0.31,~\epsilon =1, ~z=-1.12,~w=-0.13, ~t=1\)

The graphs of \(u_{3}(x,y,z,w,t)\) of Eq. (34). Values chosen are \(b_0(t)=1.3,~b_2(t)=-1.6, ~b_1(t)=-2.1, ~y=1, ~\alpha _1=1.12, ~\alpha _2=2, ~\alpha _3=0.1, ~R_1(t) =-0.3,~\nu =0.1,~\epsilon =1, ~z=-1.1,~w=-3, ~t=1\)

The graphs of \(u_{4}(x,y,z,w,t)\) of Eq. (35). Values chosen are \(b_0(t)=1.3,~b_2(t)=-1.6, ~b_1(t)=-3.1, ~y=1, ~\alpha _1=1.12, ~\alpha _2=2, ~\alpha _3=0.1, ~R_1(t) =-3.1,~\nu =2.1,~\epsilon =1, ~z=-1.1,~w=-3, ~t=1\)

The graphs of \(u_{10}(x,y,z,w,t)\) of Eq. (46). Values chosen are \(M=-0.3,~\alpha _1=-1.1, ~\alpha _2=-2.2, ~y=2, ~\alpha _3=-0.1, ~\nu =0.1,~\epsilon =1, ~z=1.1,~w=-3, ~\rho =1.3, ~t=1\)

The graphs of \(u_{12}(x,y,z,w,t)\) of Eq. (48). Values chosen are \(M=-1.3,~\alpha _1=-2.1, ~\alpha _2=-1.002, ~y=2, ~\alpha _3=-1.1, ~\nu =-1.1,~\epsilon =1, ~z=0.1,~w=-1.3, ~\rho =-2.3, ~t=1\)

The graphs of \(u_{15}(x,y,z,w,t)\) of Eq. (51). Values chosen are \(M=-1.3,~\alpha _1=-2.1, ~\alpha _2=-1.002, ~y=2, ~\alpha _3=-1.1, ~\nu =-1.1,~\epsilon =1, ~z=0.1,~w=-1.3, ~\rho =-2.3, ~t=1\)

The graphs of \(u_{16}(x,y,z,w,t)\) of Eq. (54). Values chosen are \(\lambda =1.5,~\mu =1.1, ~\nu =-1.2, ~y=1, ~\alpha _1=0.3, ~\alpha _2=1.03, ~\alpha _3=1.001, ~\rho =-1.1, ~\epsilon =1, ~z=-1.003,~w=-0.1, ~t=1\)

The graphs of \(u_{21}(x,y,z,w,t)\) of Eq. (64). Values chosen are \(\lambda =-1.1,~\mu =-2.2, ~\nu =-3.2, ~y=1, ~\alpha _1=0.3, ~\alpha _2=1.03, ~\alpha _3=0.1, ~\rho =-1.1, ~\epsilon =1, ~z=-1.3,~w=-0.1, ~t=1\)

The graphs of \(u_{24}(x,y,z,w,t)\) of Eq. (69). Values chosen are \(\lambda =4.11,~\mu =0.04, ~\nu =0.2, ~y=1, ~\alpha _1=-1.3, ~\alpha _2=-0.03, ~\alpha _3=0.11, ~\rho =0.11, ~\epsilon =0.11, ~z=1.003,~w=-1.1, ~t=1\)

The graphs of \(u_{25}(x,y,z,w,t)\) of Eq. (70). Values chosen are \(\lambda =-2.003,~\mu =-1.07, ~\nu =0.002, ~y=1, ~\alpha _1=-1.3, ~\alpha _2=-0.03, ~\alpha _3=1.1, ~\rho =0.11, ~\epsilon =0.11, ~z=-0.003,~w=-1.1, ~t=1\)
5 Conclusion
In this study, we have examined the (4+1)-dimensional nonlinear integrable Fokas equation and have analytically constructed several kinds of exact travelling wave and localised solutions. In addition to the singular and non-singular periodic solutions, breather solutions, Jacobi elliptic kind solutions, elliptic type solutions, exponential function solutions, and rational solutions are among the obtained solutions. The proposed techniques are efficient, clear, and could soon be used to investigate other higher dimensional NLEEs. Compared to the findings of earlier research, many of the new findings are more comprehensive. Several of the results are written as hyperbolic, trigonometric functions with arbitrary constant parameters. These findings are also helpful in understanding nonlinear wave dynamics in optics, hydrodynamics, solid state physics, and plasma. The higher dimensional Fokas equation is a useful multidimensional extension of the KP and DS equations, according to these results. This paper also provides an overview for reducing higher dimensional to the lower dimensional structures which is helpful to understand the nonlinear nature and dynamical behaviour of the governing model. We believe that by applying the approaches described in this work in the future, we will be able to resolve comparable higher-dimensional issues.
References
Akbar, M. Ali., Abdullah, Farah Aini, Tarikul, Islam, Md., Sharif, Al., Mohammed, A., Osman, M.S.: New solutions of the soliton type of shallow water waves and superconductivity models. Results Phys. 44, 106180 (2023)
Akbar, M.A., Wazwaz, A.M., Mahmud, F., Baleanu, D., Roy, R., Barman, H.K., Osman, M.S.: Dynamical behavior of solitons of the perturbed nonlinear Schrödinger equation and microtubules through the generalized Kudryashov scheme. Results Phys. 43, 106079 (2022)
Akinyemi, L., Hosseini, K., Salahshour, S.: The bright and singular solitons of (2+ 1)-dimensional nonlinear Schrodinger equation with spatio-temporal dispersions. Optik 242, 167120 (2021)
Akinyemi, L., Inc, M., Khater, M., Rezazadeh, H.: Dynamical behaviour of chiral nonlinear Schrodinger equation. Opt. Quant. Electron. 54(3), 1–15 (2022)
Akram, G., Sadaf, M., Arshed, S., Sameen, F.: Bright, dark, kink, singular and periodic soliton solutions of Lakshmanan-Porsezian-Daniel model by generalized projective Riccati equations method. Optik 241, 167051 (2021)
An, D., Linden, N., Liu, J.-P., Montanaro, A., Shao, C., Wang, J.: Quantum-accelerated multilevel monte Carlo methods for stochastic differential equations in mathematical finance. Quantum 5, 481 (2021)
Bilige, S., Chaolu, T., Wang, X.: Application of the extended simplest equation method to the coupled Schrodinger-Boussinesq equation. Appl. Math. Comput. 224, 517–523 (2013)
Friedman, A.: PDE problems arising in mathematical biology. Netw. Heterog. Med. 7(4), 691–703 (2012)
Gepreel, K.A.: Extended trial equation method for nonlinear coupled Schrodinger Boussinesq partial differential equations. J. Egypt. Math. Soc. 24(3), 381–391 (2016)
Islam, M.T., Akbar, M.A., Gomez-Aguilar, J.F., Bonyah, E., Fernandez-Anaya, G.: Assorted soliton structures of solutions for fractional nonlinear Schrödinger types evolution equations. J. Ocean Eng. Sci. 7(6), 528–535 (2022)
Islam, M.T., Akter, M.A., Gomez-Aguilar, J.F., Akbar, M.A., Perez-Careta, E.: Novel optical solitons and other wave structures of solutions to the fractional order nonlinear Schrödinger equations. Opt. Quant. Electron. 54(8), 520 (2022)
Islam, M.T., Akter, Mst Armina, Gomez-Aguilar, J.F., Akbar, M.A., Perez-Careta, E.: Innovative and diverse soliton solutions of the dual core optical fiber nonlinear models via two competent techniques. J. Nonlinear Opt. Phys. Mater. 32, 2350037 (2023)
Islam, Md Tarikul, Sarkar, Tara Rani, Abdullah, Farah Aini, Gomez-Aguilar, J. F.: Characteristics of dynamic waves in incompressible fluid regarding nonlinear Boiti-Leon-Manna-Pempinelli model. J. Ocean Eng. Sci (2023)
Islam, Md Tarikul, Akter, Mst Armina, Ryehan, Shahariar, Gomez-Aguilar, J. F., Akbar, Md Ali: A variety of solitons on the oceans exposed by the Kadomtsev Petviashvili-modified equal width equation adopting different techniques. J. Ocean Eng. Sci. (2022)
Ismael, H.F., Younas, U., Sulaiman, T.A., Nasreen, N., Shah, N.A., Ali, M.R.: Ali Non classical interaction aspects to a nonlinear physical model. Results Phys. 49, 106520 (2023)
Javeed, S., Riaz, S., Saleem Alimgeer, K., Atif, M., Hanif, A., Baleanu, D.: First integral technique for finding exact solutions of higher dimensional mathematical physics models. Symmetry 11(6), 783 (2019)
Kaplan, M., Akbulut, A., Raza, N.: Research on sensitivity analysis and traveling wave solutions of the (4+ 1)-dimensional nonlinear Fokas equation via three different techniques. Phys. Scr. 97(1), 015203 (2022)
Khater, M.M., Anwar, S., Tariq, K.U., Mohamed, M.S.: Some optical soliton solutions to the perturbed nonlinear Schrodinger equation by modified Khater method. AIP Adv. 11(2), 025130 (2021)
Kumar, D., Manafian, J., Hawlader, F., Ranjbaran, A.: New closed form soliton and other solutions of the Kundu-Eckhaus equation via the extended Sinh-Gordon equation expansion method. Optik 160, 159–167 (2018)
Lu, D., Seadawy, A.R., Khater, M.M.: Structures of exact and solitary optical solutions for the higher-order nonlinear Schrödinger equation and its applications in mono-mode optical fibers. Mod. Phys. Lett. B 33(23), 1950279 (2019)
Mortazavi, M., Gachpazan, M.: New (f/g)-expansion method and its applications to nonlinear PDES in mathematical physics. Electron. J. Math. Anal. Appl. 4, 175–183 (2016)
Nasreen, N., Lu, D., Zhang, Z., Akgul, A., Younas, U., Nasreen, S., Ameenah, N., Al-Ahmadi: Propagation of optical pulses in fiber optics modelled by coupled space-time fractional dynamical system. Alexandria Eng. J. 73, 173–187 (2023b)
Nasreen, Naila, Rafiq, Naveed, Younas, U., Lu, D.: Sensitivity analysis and solitary wave solutions to the (2+ 1)-dimensional Boussinesq equation in dispersive media. Modern Phys. Lett. B 38, 2350227 (2023e)
Nasreen, Naila, Seadawy, Aly R., Lu, Dianchen, Arshad, Muhammad: Optical fibers to model pulses of ultrashort via generalized third-order nonlinear Schrödinger equation by using extended and modified rational expansion method. J. Nonlinear Opt. Phys. Mater. (2023a). https://doi.org/10.1142/S0218863523500583
Nasreen, N., Younas, U., Lu, D., Zhang, Z., Rezazadeh, H., Hosseinzadeh, M.A.: Propagation of solitary and periodic waves to conformable ion sound and Langmuir waves dynamical system. Opt. Quant. Electron. 55(10), 868 (2023d)
Nasreen, N., Younas, U., Sulaiman, T.A., Zhang, Z., Lu, D.: A variety of M-truncated optical solitons to a nonlinear extended classical dynamical model. Results Phys. 51, 106722 (2023c)
Ozdemir, N., Esen, H., Secer, A., Bayram, M., Yusuf, A., Sulaiman, T.A.: Optical solitons and other solutions to the Hirota-Maccari system with conformable, M-truncated and beta derivatives. Modern Phys. Lett. B 36(11), 2150625 (2022)
Rafiq, M. N., Majeed, A., Inc, M., Kamran, M.: New traveling wave solutions for space-time fractional modified equal width equation with beta derivative, Available at SSRN 4074772 (2022)
Rani, A., Zulfiqar, A., Ahmad, J., Hassan, Q.M.U.: New soliton wave structures of fractional Gilson-pickering equation using Tanh-Coth method and their applications. Results Phys. 29, 104724 (2021)
Rasheed, N.M., Al-Amr, M.O., Az-Zobi, E.A., Tashtoush, M.A., Akinyemi, L.: Stable optical solitons for the higher-order Non-Kerr NLSE via the modified simple equation method. Mathematics 9(16), 1986 (2021)
Rehman, H., Seadawy, A.R., Younis, M., Rizvi, S., Anwar, I., Baber, M., Althobaiti, A.: Weakly nonlinear electron-acoustic waves in the fluid ions propagated via a (3+ 1)-dimensional generalized Korteweg-de-Vries-Zakharov-Kuznetsov equation in plasma physics. Results Phys. 33, 105069 (2022)
Sahoo, S., Garai, G., Ray, S.S.: Lie symmetry analysis for similarity reduction and exact solutions of modified KdV-Zakharov-Kuznetsov equation. Nonlinear Dyn. 87(3), 1995–2000 (2017)
Samuel, R., Bhattacharya, S., Asad, A., Chatterjee, S., Verma, M.K., Samtaney, R., Anwer, S.: Saras: a general-purpose PDE solver for fluid dynamics. J. Open Source Softw. 6, 2095 (2021)
Sarwar, S.: New soliton wave structures of nonlinear (4+ 1)-dimensional FOKAS dynamical model by using different methods. Alex. Eng. J. 60(1), 795–803 (2021)
Seadawy, A.R., Arshad, M., Lu, D.: The weakly nonlinear wave propagation of the generalized third-order nonlinear Schrödinger equation and its applications. Waves Random Complex Media 32, 1–13 (2020)
Seadawy, A.R., Lu, D., Khater, M.M.: New wave solutions for the fractional-order biological population model, time fractional burgers, Drinfeld-Sokolov-Wilson and system of shallow water wave equations and their applications. Eur. J. Comput. Mech. 26(5–6), 508–524 (2017)
Seadawy, A.R., Nasreen, N., Lu, D.: Complex model ultra-short pulses in optical fibers via generalized third-order nonlinear Schrödinger dynamical equation. Int. J. Modern Phys. B 34(17), 2050143 (2020)
Song, C., Liu, Y.: Extended homogeneous balance conditions in the sub-equation method. J. Appl. Anal. 28(1), 165–179 (2022)
Tarikul, Islam, Md., Ryehan, Shahariar, Abdullah, Farah Aini, Gomez-Aguilar, J.F.: The effect of Brownian motion and noise strength on solutions of stochastic Bogoyavlenskii model alongside conformable fractional derivative. Optik 287, 171140 (2023)
Ullah, N., Asjad, M.I., Awrejcewicz, J., Muhammad, T., Baleanu, D.: On soliton solutions of fractional-order nonlinear model appears in physical sciences. AIMS Math. 7(5), 7421–7440 (2022)
Xu, Z., Chow, K.: Breathers and rogue waves for a third order nonlocal partial differential equation by a bilinear transformation. Appl. Math. Lett. 56, 72–77 (2016)
Yang, X.-F., Deng, Z.-C., Wei, Y.: A Riccati-Bernoulli sub-ode method for nonlinear partial differential equations and its application. Adv. Differ. Equ. 2015(1), 1–17 (2015)
Yokus, A., Durur, H., Duran, S., Islam, M.T.: Ample felicitous wave structures for fractional foam drainage equation modeling for fluid-flow mechanism. Comput. Appl. Math. 41(4), 174 (2022)
Zahran, E.H., Khater, M.M.: Modified extended tanh-function method and its applications to the Bogoyavlenskii equation. Appl. Math. Model. 40(3), 1769–1775 (2016)
Acknowledgements
F.B. acknowledges the financial support provided by Hubei University of Automotive Technology in the form of a start-up research grant (BK202212).
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Contributions
FB: Identification of the research problem, analysis of the outcomes, review and editing. KUT: Methodology, conceptualization, validation. MI: Supervision, project administration. RJ: Formal analysis and investigation, writing original draft, visualization.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Ethical approval
Not applicable.
Consent for publication
All the authors have agreed and given their consent for the publication of this research paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Badshah, F., Tariq, K.U., Inc, M. et al. On soliton solutions of Fokas dynamical model via analytical approaches. Opt Quant Electron 56, 743 (2024). https://doi.org/10.1007/s11082-023-06198-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-023-06198-2