
Abstract
This study discusses a new version of the \((2+1)\)-dimensional Kadomtsev-Petviashvili equation. This equation is used to model the behavior of nonlinear waves in various fields like ferromagnetic media, ion-acoustic waves in plasma physics, and fluid dynamics. It is instrumental in modeling surface and internal waves in straits or channels. The main goal of the research is to determine the exact solutions for this equation and analyze their physical characteristics. We obtain exact solutions using two improved techniques, namely the modified extended tanh-function and the modified generalized Kudryashov methods. These techniques investigate various exact solutions, such as exponential, rational, hyperbolic, and trigonometric. Besides, the sensitivity and the stability analysis of the model are presented. Additionally, three- and two-dimensional contour plots are created to present the physical behavior of the exact solutions.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear Evolution Equations (NLEEs) are essential in studying various dynamic processes, including nonlinear optics, solid-state physics, geology, image processing, oceanography, thermodynamics, fluid mechanics, quantum field theory, and chemical reactions [1, 8]. In recent years, numerous analytical and numerical methods have been proposed and applied to address NLEEs. Some of these methods are: Hirota bilinear method [9], tanh-coth expansion method [10,11,12,13], IBSEF method [14], solitary wave ansatz method [15], first integral method, [16] a new version of trial equation method [17], spectral Tau method [18], exp(-\(\phi \)(\(\eta \)))-expansion method [19], generalized He’s Exp-function method [20], rational sine-cosine method [21, 22], Aboodh transform decomposition method [23], Riccati equation method [24], and bilinear neural network method [29,30,31,32]. These methods transform the NLEEs into solvable differential equations, allowing efficient solutions for nonlinear differential equations.
The Kadomtsev-Petviashvili (KP) equation is essential for studying the stability of the one-soliton solution of the Korteweg-de Vries (KdV) equation under transverse perturbations. In the 1970 s, the \((2+1)\)-dimensional KP equation that now bears the names of the two physicists was derived as a model for investigating the evolution of small amplitude long ion-acoustic waves propagating in plasmas and defined as [33]:
where \(G=G(x,y,t)\), the longitudinal and transverse spatial coordinates are denoted by x and y, respectively. This equation contains weak transversal perturbations, weakly dispersive waves with weak dispersion \(G_{xxx}\), and quadratic nonlinearity \( G G_x\).
-
If \(\gamma =\sqrt{-1}\), the Eq. (1.1) describes the KP-I equation, which is used to model waves in thin films with high surface tension.
-
If \(\gamma =1\), the Eq. (1.1) converts to KP-II equation which describes low surface tension water waves.
Physicists differentiate between KP- I and II in the classical KP equation based on the \(\textit{sign}\) of the dispersive term, indicating positive or negative dispersion in media.
Considering the KP model’s many applications, researchers have become more interested in studying its exact traveling wave solutions in recent years. Yue et al. [34] investigated \((3 + 1)\)-dimensional KP equation by modified Khater and Jacobi elliptical function methods. Khan and Akbar applied the exp\((-\Phi (\xi ))\)-expansion method to \((2 + 1)\)-dimensional KP equation in [35]. Raza et al. implemented a linear superposition technique to \(n+1\)- dimensional integrable extension of KP equation [36], and references therein [37, 39].
In this work, we will focus on a more general form of extended \((2 + 1)\)-dimensional KP equation [40]
where \(\chi _1, \chi _2, \chi _3\) are real constants. The terms \(\chi _1\), \(\chi _2\), and \(\chi _3\) symbolize the terms related to dispersion effects. Specifically, \(\chi _1 G_{yy}\) represents spatial dispersion, \(\chi _2 G_{tt}\) represents temporal dispersion, and \(\chi _3 G_{ty}\) represents the cross-dispersion effect. These terms contribute to the characterization of dispersion phenomena within the equation.
This work aims to obtain various families of exact solutions for the given Eq. (1.2) and analyze their physical states in detail. Obtaining analytical solutions to the Kadomtsev-Petviashvili (KP) equation provides insights into the system’s behavior described by the equation. They can reveal fundamental properties, such as the existence of certain types of waves, solitons, or other coherent structures, shedding light on the underlying dynamics. Besides, analytical solutions allow for the prediction of specific behaviors under different conditions without extensive computational simulations. This predictive capability is invaluable in various fields, including fluid dynamics, plasma physics, and nonlinear optics.
The rest of the article is structured as follows. Section 2 and 3 explain the modified extended tanh-function and generalized Kudryashov methods. In Sect. 4, new exact solutions for the generalized extended Kadomtsev-Petviashvili equation are presented. Section 5 presents the dynamical strategy sensitivity, while Sect. 6 provides a brief analysis of the stability. Benefits, limitations of this proposed scheme, and graphical behaviors are discussed in Sect. 7. Finally, a brief conclusion is presented in the last section.
2 Modified extended tanh-function method
To demonstrate the main idea of the modified extended tanh-function method, we examine the partial differential equation as [41, 42].
where \(\Psi \) is a polynomial in G(x, t) with nonlinear components in its partial derivatives.
The traveling wave transformation is defined as:
Eq. (2.1) is transformed into an ordinary differential equation (ODE) using the transformation described in Eq. (2.2), which is then given in the following form:
Assume that the solution to Eq. (2.3) takes on the following form,
To verify that \(H( \zeta )\) satisfies the Riccati equation and to satisfy the requirements \(a_{M}\ne 0\), \(b_{M}\ne 0\), the constants \(a_j\) and \(b_j\) must be established,
where \(\lambda \) is a constant that will be determined later. Several different solutions can be obtained for Eq. (2.5), as illustrated below,
-
When \(\lambda <0\)
$$\begin{aligned} H( \zeta )= & {} -\sqrt{-\lambda }tanh(\sqrt{-\lambda } \zeta )\ \ or\\ H( \zeta )= & {} -\sqrt{-\lambda }coth(\sqrt{-\lambda } \zeta ). \end{aligned}$$ -
When \(\lambda >0\)
$$\begin{aligned} H( \zeta )=\sqrt{\lambda }tan(\sqrt{\lambda } \zeta )\ \ or\ \ H( \zeta )=-\sqrt{\lambda }cot(\sqrt{\lambda } \zeta ). \end{aligned}$$ -
When \(\lambda =0\)
$$\begin{aligned} H( \zeta )=-\frac{1}{ \zeta }. \end{aligned}$$
Determining the positive integer M in Eq. (2.4) requires balancing the nonlinear variables and highest-order derivatives. The values of \(a_j\) and \(b_j\) may be obtained using symbolic calculations by substituting Eq. (2.4), together with its derivative, and Eq. (2.5), in Eq. (2.3). After that, exact solutions for Eq. (2.1) may be calculated by collecting terms with the same power \(H^{j}\), where \((j=0,1,2,\cdots ,M)\), and setting them to zero. By substituting the determined values into the Eq. (2.4), together with the responses to the Eq. (2.5), the exact solutions to Eq. (2.1) are obtained.
3 The modified generalized Kudryashov method
This section presents the generalized modified Kudryas hov approach [7]. The subsequent phases should be implemented analogously to executing the initial two steps in the preceding methodology.
Exact solutions can be constructed as a finite series as
where, the constant \(b_r\), (\( r = 0, 1,\ldots , M\)) is undetermined. Furthermore, the following Riccati equation will be satisfied by \(Q(\zeta )\),
where \(\sigma ,\delta \) and \(\tau \) denote real constants. Following is a summary of the solutions to Eq. (3.2) for various cases of these coefficients:
-
When \(\tau \ne 0\) and \(\sigma ,\delta \) are arbitrary constants, then \(H(\zeta )\) can be written as
$$\begin{aligned} H(\zeta )=\frac{\sqrt{4 \tau \sigma -\delta ^2} \tan \left( \frac{1}{2} (d+\zeta ) \sqrt{4 \tau \sigma -\delta ^2}\right) -\delta }{2 \tau }. \end{aligned}$$(3.3) -
When \(\tau \) is an arbitrary constant, \(\delta \ne 0\), and \(\sigma = 0\), \(H(\zeta )\) can be expressed as
$$\begin{aligned} H(\zeta )=-\frac{\delta \textrm{e}^{\delta (d+\zeta )}}{\tau \textrm{e}^{\delta (d+\zeta )}-1}. \end{aligned}$$(3.4) -
When \(\sigma \) is an arbitrary constant, \(\delta \ne 0\) and \(\tau = 0\), the expression for \(H(\zeta )\) is given by,
$$\begin{aligned} H(\zeta )=\frac{\textrm{e}^{\delta (d+\zeta )}}{\delta }-\frac{\sigma }{\delta }. \end{aligned}$$(3.5)
To find the solutions to the equation, the last phase of the previous method is also applied.
4 Application of the techniques
This section shows the effectiveness of the modified generalized Kudryashov and the modified extended tanh-function methods in obtaining the solitary wave solutions of the model (2.1), which are the generalized extended KP equation using \(G(x,y,t)=g(\zeta )\), \(\zeta =x+my+ct\), we get
Balancing, \(g^{2}=2M, g''=M+2\) results in \(M=2\), the following exact solutions are derived.
4.1 Analytical solutions by modified extended tanh-function method
By taking \(M=2\), the series of sums (2.4) is as follows:
When combined with Eq. (4.1), the algebraic system that follows is created.
Six cases of solutions for the coefficients \(a_0\), \(a_1\), \(a_2\),\(b_1\), and c are obtained.
case 1
\(\bullet \) For \(\lambda <0, \ \chi _2 \ne 0\)
where \(\Delta _1= 4 \chi _2 \left( 4 \lambda -m^2 \chi _1\right) +\left( - m \chi _3-1\right) {}^2 \ge 0\), and \(\Delta _2= 4 \chi _2 \left( 4 \lambda -m^2 \chi _1\right) +\left( m \chi _3-1\right) ^2 \ge 0. \)
\(\bullet \) For \(\lambda >0, \ \chi _2\ne 0\)
where \(\Delta _1 = 4 \chi _2 \left( 4 \lambda -m^2 \chi _1\right) +\left( m \chi _3+1\right) {}^2\ge 0\).
\(\bullet \) For \(\lambda =0\)
case 2
\(\bullet \) For \(\lambda <0, \chi _2\ne 0\)
where \(\Delta _1= 4 \chi _2 \left( 4 \lambda -m^2 \chi _1\right) +\left( -m \chi _3-1\right) {}^2 \ge 0. \)
\(\bullet \) For \(\lambda >0, \ \chi _2\ne 0\)
where \(\Delta _1 = 4 \chi _2 \left( 4 \lambda -m^2 \chi _1\right) +\left( m \chi _3+1\right) {}^2\ge 0\).
\(\bullet \) For \(\lambda =0, \ \chi _2\ne 0\)
where \(\Delta _3=\left( -m \chi _3-1\right) {}^2-4 m^2 \chi _1 \chi _2\ge 0.\)
case 3
\(\bullet \) For \(\lambda <0, \ \chi _2\ne 0\)
where \(\Delta _4 = 4 \chi _2 \left( 16 \lambda -m^2 \chi _1\right) +\left( m \chi _3- 1\right) ^2 \ge 0.\)
\(\bullet \) For \(\lambda >0, \ \chi _2\ne 0\)
where \(\Delta _5= \chi _2 \left( 64 \lambda -4 m^2 \chi _1\right) +\left( m \chi _3+1\right) ^2\ge 0. \)
\(\bullet \) For \(\lambda =0, \ \chi _2\ne 0.\)
where \(\Delta _3=\left( -m \chi _3-1\right) {}^2-4 m^2 \chi _1 \chi _2\ge 0.\)
case 4
\(\bullet \) For \(\lambda <0, \chi _2 \ne 0\)
\(\bullet \) For \(\lambda >0, \chi _2\ne 0\)
where \(\Delta _6= \left( m \chi _3+1\right) {}^2-4 \chi _2 \left( 4 \lambda +m^2 \chi _1\right) \ge 0.\)
\(\bullet \) For \(\lambda =0\)
case 5
\(\bullet \) For \(\lambda <0, \chi _2 \ne 0\)
\(\bullet \) For \(\lambda >0, \chi _2 \ne 0\)
\(\bullet \) For \(\lambda =0, \chi _2 \ne 0\)
case 6
\(\bullet \) For \(\lambda <0, \chi _2 \ne 0\)
\(\bullet \) For \(\lambda >0,\ \chi _2 \ne 0\)
where \(\Delta _{7}=\left( m \chi _3+1\right) {}^2-4 \chi _2 \left( 16 \lambda +m^2 \chi _1\right) \ge 0. \)
\(\bullet \) For \(\lambda =0,\ \chi _2 \ne 0\)
where \(\Delta _3=\left( m \chi _3+1\right) {}^2-4 m^2 \chi _1 \chi _2\ge 0. \)
4.2 The modified generalized Kudryashov method solutions
By taking \(M=2\), Eq. (3.1) becomes,
and when considered together with the Eq. (3.2) here, the following algebraic system of equations is obtained,
Two cases of solutions for the coefficients \(s_0\), \(s_1\), \(s_2\), \(b_1\), and c are obtained.
case 7
\(\bullet \) The following is the result of solving Eq. (3.3) with expression (4.28) inserted:
where \(\Delta _{11}=4 \chi _2 \left( \delta ^2-m^2 \chi _1-4 \sigma \tau \right) +\left( m \chi _3 \right. \) \( \left. +1\right) {}^2,\ \chi _2 \ne 0\).
\(\bullet \) The following is the result of solving Eq. (3.4) with expression (4.28) inserted:
where \(\Delta _{12}=4 \chi _2 \left( \delta ^2-m^2 \chi _1\right) +\left( m \chi _3+1\right) {}^2,\ \chi _2 \ne 0\).
\(\bullet \) The following is the result of solving Eq. (3.5) with expression (4.28) inserted:
where \(\Delta _{12}=4 \chi _2 \left( \delta ^2-m^2 \chi _1\right) +\left( m \chi _3+1\right) {}^2,\ \chi _2 \ne 0\).
case 8
\(\bullet \) The following is the result of solving Eq. (3.3) with expression (4.32) inserted:
where \(\Delta _{13}=\left( m \chi _3+1\right) {}^2-4 \chi _2 \left( \delta ^2+m^2 \chi _1-4 \sigma \right. \left. \tau \right) ,\ \chi _2 \ne 0\).
\(\bullet \) The following is the result of solving Eq. (3.4) with expression (4.32) inserted:
where \(\chi _2 \ne 0\).
\(\bullet \) The following is the result of solving Eq. (3.5) with expression (4.32) inserted:

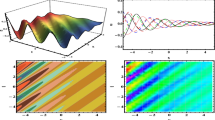
Graphical representation of sensitivity analysis under parametric values are \(c=0.1,~m=0.8,~\chi _1=0.2,~\chi _2=1~\text {and}~\chi _3=0.7\)
where \(\chi _2 \ne 0\).
5 Sensitivity analysis
In this section, we examine the dynamical strategy sensitivity as suggested by Eq. (4.1). In considering this, let’s examine the dynamical system that follows
The following parameters are taken into account: \(c=0.1,~m=0.8,~\chi _1=0.2,~\chi _2=1~\text {and}~\chi _3=0.7\). The starting values are utilized since the system’s behavior is represented by the yellow waves with \((Z_1(0), Z_2(0))=(0.1,0)\). Similar to this, the proposed system’s green oscillatory dynamics are expected to have to start values of \((Z_1(0), Z_2(0))=(0.3,0)\), whereas the beginning values for the red oscillations are \((Z_1(0), Z_2(0))=(0.6,0)\).
The resulting outcomes are illustrated in Fig. 1. Figure observations show that even minor modifications to the starting values significantly impact the dynamics of the suggested system.
6 Stability analysis
To check the validity of solutions use the stability analysis
The following conditions are used for stability analysis
Let check, the stability using Eq. (4.29), we get:
Hence, the solution is stable on the interval \(x \in [-10, 10]\). Similarly, the stability of other solutions could be checked using the above process.
7 Graphs and discussion
This section provides the results using graphical representations and specifies explanations for the obtained solutions. In Figs. 3 through 5, we employ the modified extended tanh-function method, while in Figs. 6 through 8, we utilize the modified generalized Kudryashov method.

Graphical illustration for stability analysis using different values of r

3-D, 2-D and contour plots of mixed singular-dark soliton solution of Eq. (4.8) for \( \chi _1=-0.5, \, \chi _2=-0.71, \chi _3=0.31, \, \lambda =-1, \, y=1, \, m=0.19.\)

3-D, 2-D and contour plots of periodic function solution of Eq. (4.9) for \(\chi _1=-0.5, \chi _2=0.71, \chi _3=0.31, \, \lambda =1, \, y=1, \, m=0.19.\)

3-D, 2-D and contour plots of rational function solution of Eq. (4.10) for \(\chi _1=-0.5, \chi _2=0.71,\, \chi _3=0.31, \, \lambda =0, \, y=1, m=0.19\)

3-D, 2-D and contour plots of periodic function solution of Eq. (4.29) for \(\chi _1=-0.27, \, \chi _2=-0.66, \, \chi _3=0.99, \, \lambda =-1, \, y=2, \, m=0.19, \, \delta =0.83, \, \tau =0.75, \, \sigma =0.68, \, d=0.56\)

3-D, 2-D and contour plots of exponential function solution of Eq. (4.30) for \(\chi _1=-0.27, \, \chi _2=0.51, \, \chi _3=0.33, \, \lambda =-1, \, y=1, \, m=0.19, \, \delta =0.85, \, \tau =0.59, \, \sigma =0.68, \, d=0.8\)

3-D, 2-D and contour plots of exponential function solution of Eq. (4.35) for \(\chi _1=0.27, \, \chi _2=-0.51, \, \chi _3=0.33, \, \lambda =1, \, y=1, \, m=0.19, \, \delta =-0.85, \, \tau =0.59, \, \sigma =0.68, \, d=0.8\)
Remark 7.1
For \(M=2\), we choose the parameters in Fig. 3 as:
\( \chi _1\text {=}-0.5, \, \chi _2\text {=}-0.71, \, \chi _3\text {=}0.31, \, \lambda \text {=}-1, \, y=1, \, m=0.19.\)
For \(M=2\), we choose the parameters in Fig. 4 as:
\(\chi _1\text {=}-0.5, \, \chi _2\text {=}0.71, \, \chi _3\text {=}0.31, \, \lambda \text {=}1, \, y=1, \, m=0.19.\)
For \(M=2\), we choose the parameters in Fig. 5 as:
\(\chi _1=-0.27, \, \chi _2=-0.66, \, \chi _3=0.99, \, \lambda =-1, \, y=2, \, m=0.19, \, \delta =0.83, \, \tau =0.75, \, \sigma =0.68, \, d=0.56\)
For \(M=2\), we choose the parameters in Fig. 6 as:
\(\chi _1=-0.27, \, \chi _2=-0.66, \, \chi _3=0.99, \, \lambda =-1, \, y=2, \, m=0.19, \, \delta =0.83, \, \tau =0.75, \, \sigma =0.68, \, d=0.56\)
For \(M=2\), we choose the parameters in Fig. 7 as:
\(\chi _1=-0.27, \, \chi _2=0.51, \, \chi _3=0.33, \, \lambda =-1, \, y=1, \, m=0.19, \, \delta =0.85, \, \tau =0.59, \, \sigma =0.68, \, d=0.8\)
For \(M=2\), we choose the parameters in Fig. 8 as:
\(\chi _1=0.27, \, \chi _2=-0.51, \, \chi _3=0.33, \, \lambda =1, \, y=1, \, m=0.19, \, \delta =-0.85, \, \tau =0.59, \, \sigma =0.68, \, d=0.8\)
Remark 7.2
Within themselves, solutions (4.4), (4.8) and (4.12), solutions (4.5) and (4.9), solutions (4.10) and (4.14), solutions (4.16) and (4.20), solutions (4.17) and (4.21), solutions (4.22) and (4.26), solutions (4.24) and (4.25) exhibit analogous wave behaviors.
Remark 7.3
Based on the definitions and properties of hyperbolic and trigonometric functions, it follows that
Therefore, solutions (4.16) and (4.17), as well as solutions (4.20) and (4.21), and solutions (4.24) and (4.25), exhibit the same behavior within themselves.
8 Conclusion
This study explores the new exact solutions of a recently formulated generalized extended (2+1)-dimensional Kadomtsev-Petviashvili equation employing two distinct methodologies. Initially, we employ the modified extended tanh-function method to derive solutions encompassing hyperbolic, trigonometric, and rational forms. Subsequently, we utilize the Kudryashov method to ascertain exact solutions, encompassing exponential, hyperbolic, trigonometric, and rational functions. Furthermore, we conduct a comprehensive analysis of the dynamic behaviors of these solutions through the utilization of three-dimensional, two-dimensional, and contour plots. Finally, we undertake sensitivity and stability analyses of selected analytical solutions. The solutions derived hold significant applicability in mathematical physics and allied domains, offering direct and robust solution expressions. As a future work, this new model can be solved analytically by other robust and reliable methods, such as the bilinear neural network method.
Data availability
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
References
Şenol, M., Gençyiğit, M., Koksal, M. E., Qureshi, S. New analytical and numerical solutions to the (2+1)-dimensional conformable cpKP-BKP equation arising in fluid dynamics, plasma physics, and nonlinear optics. Opt. Quant. Electron., 56 (2024)
Lu, D., Tariq, K.U., Osman, M.S., Baleanu, D., Younis, M., Khater, M.M.: New analytical wave structures for the (3+ 1)-dimensional Kadomtsev-Petviashvili and the generalized Boussinesq models and their applications. Results Phys. 14, 102491 (2019)
Wazwaz, A.M.: Multiple kink solutions and multiple singular kink solutions for two systems of coupled Burgers-type equations. Commun. Nonlinear Sci. Numer. Simul. 14(7), 2962–2970 (2009)
Liaqat, M.I., Akgül, A., De la Sen, M., Bayram, M.: Approximate and exact solutions in the sense of conformable derivatives of quantum mechanics models using a novel algorithm. Symmetry 15(3), 744 (2023)
Zhang, L.D., Tian, S.F., Peng, W.Q., Zhang, T.T., Yan, X.J.: The dynamics of lump, lumpoff and rogue wave solutions of (2+ 1)-dimensional Hirota-Satsuma-Ito equations. East Asian J. Appl. Math. 10(2), 243–255 (2020)
Ahmad, H., Seadawy, A.R., Khan, T.A.: Study on numerical solution of dispersive water wave phenomena by using a reliable modification of variational iteration algorithm. Math. Comput. Simul. 177, 13–23 (2020)
Liu, F., Feng, Y.: The modified generalized Kudryashov method for nonlinear space-time fractional partial differential equations of Schrödinger type. Results Phys. 53, 106914 (2023)
Ilhan, O.A., Abdulazeez, S.T., Manafian, J., Azizi, H., Zeynalli, S.M.: Multiple rogue and soliton wave solutions to the generalized Konopelchenko-Dubrovsky-Kaup-Kupershmidt equation arising in fluid mechanics and plasma physics. Mod. Phys. Lett. B 35(23), 2150383 (2021)
Akinyemi, L.: Shallow ocean soliton and localized waves in extended (2+1)-dimensional nonlinear evolution equations. Phys. Lett. A 463, 128668 (2023)
Ali, M., Alquran, M., Salman, O.B.: A variety of new periodic solutions to the damped (2+ 1)-dimensional Schrodinger equation via the novel modified rational sine-cosine functions and the extended tanh-coth expansion methods. Results Phys. 37, 105462 (2022)
Alquran, M.: Dynamic behavior of explicit elliptic and quasi periodic-wave solutions to the generalized (2+ 1)-dimensional Kundu-Mukherjee-Naskar equation. Optik, 171697 (2024)
Alquran, M.: Necessary conditions for convex-periodic, elliptic-periodic, inclined-periodic, and rogue wave-solutions to exist for the multi-dispersions Schrodinger equation. Phys. Scr. 99(2), 025248 (2024)
Alquran, M.: Derivation of some bi-wave solutions for a new two-mode version of the combined Schamel and KdV equations. Part. Differ. Equ. Appl. Math., 100641 (2024)
Demirbilek, U., Mamedov, K.R.: Application of IBSEF method to Chaffee-Infante equation in (1+ 1) and (2+ 1) dimensions. Comput. Math. Math. Phys. 63(8), 1444–1451 (2023)
Ntiamoah, D., Ofori-Atta, W., Akinyemi, L.: The higher-order modified Korteweg-de Vries equation: its soliton, breather and approximate solutions. J. Ocean Eng. Sci. (2022)
Eslami, M., Rezazadeh, H.: The first integral method for Wu-Zhang system with conformable time-fractional derivative. Calcolo 53, 475–485 (2016)
Pandir, Y., Ekin, A.: New solitary wave solutions of the Korteweg-de Vries (KdV) equation by new version of the trial equation method. Electron. J. Appl. Math. 1, 101–113 (2023)
Srivastava, H.M., Gusu, D.M., Mohammed, P.O., Wedajo, G., Nonlaopon, K., Hamed, Y.S.: Solutions of general fractional-order differential equations by using the spectral Tau method. Fractal Fract. 6(1), 7 (2021)
Alharbi, A.R., Almatrafi, M.B., Abdelrahman, M.A.: Analytical and numerical investigation for Kadomtsev-Petviashvili equation arising in plasma physics. Phys. Scr. 95(4), 045215 (2020)
Gaber, A.A., Wazwaz, A.M., Mousa, M.M.: Similarity reductions and new exact solutions for (3+ 1)-dimensional B-B equation. Mod. Phys. Lett. B 38(05), 2350243 (2024)
Alquran, M., Al-deiakeh, R.: Lie-Backlund symmetry generators and a variety of novel periodic-soliton solutions to the complex-mode of modified Korteweg-de vries equation. Qual. Theory Dyn. Syst. 23(2), 95 (2024)
Alquran, M.: Classification of single-wave and bi-wave motion through fourth-order equations generated from the Ito model. Phys. Scr. 98(8), 085207 (2023)
Khan, K., Ali, A., Irfan, M., Khan, Z.A.: Solitary wave solutions in time-fractional Korteweg-de Vries equations with power law kernel. AIMS Math. 6, 7 (2023)
Rezazadeh, H., Korkmaz, A., Eslami, M., Vahidi, J., Asghari, R.: Traveling wave solution of conformable fractional generalized reaction Duffing model by generalized projective Riccati equation method. Opt. Quant. Electron. 50, 1–13 (2018)
Zhang, R.F., Li, M.C., Gan, J.Y., Li, Q., Lan, Z.Z.: Novel trial functions and rogue waves of generalized breaking soliton equation via bilinear neural network method. Chaos, Solitons Fractals 154, 111692 (2022)
Zhang, R.F., Li, M.C., Albishari, M., Zheng, F.C., Lan, Z.Z.: Generalized lump solutions, classical lump solutions and rogue waves of the (2+ 1)-dimensional Caudrey-Dodd-Gibbon-Kotera-Sawada-like equation. Appl. Math. Comput. 403, 126201 (2021)
Zhang, R.F., Li, M.C., Cherraf, A., Vadyala, S.R.: The interference wave and the bright and dark soliton for two integro-differential equation by using BNNM. Nonlinear Dyn. 111(9), 8637–8646 (2023)
Zhang, R.F., Bilige, S., Liu, J.G., Li, M.: Bright-dark solitons and interaction phenomenon for p-gBKP equation by using bilinear neural network method. Phys. Scr. 96(2), 025224 (2020)
Zhang, R.F., Li, M.C.: Bilinear residual network method for solving the exactly explicit solutions of nonlinear evolution equations. Nonlinear Dyn. 108(1), 521–531 (2022)
Zhang, R.F., Bilige, S.: Bilinear neural network method to obtain the exact analytical solutions of nonlinear partial differential equations and its application to p-gBKP equation. Nonlinear Dyn. 95, 3041–3048 (2019)
Zhang, R.F., Li, M.C., Yin, H.M.: Rogue wave solutions and the bright and dark solitons of the (3+ 1)-dimensional Jimbo-Miwa equation. Nonlinear Dyn. 103(1), 1071–1079 (2021)
Zhang, R., Bilige, S., Chaolu, T.: Fractal solitons, arbitrary function solutions, exact periodic wave and breathers for a nonlinear partial differential equation by using bilinear neural network method. J. Syst. Sci. Complex. 34(1), 122–139 (2021)
Kadomtsev, B.B., Petviashvili, V.I.: On the stability of solitary waves in weakly dispersing media. Doklady Akademii Nauk Russian Acad. Sci. 192(4), 753–756 (1970)
Yue, C., Khater, M., Attia, R. A., Lu, D.: Computational simulations of the couple Boiti-Leon-Pempinelli (BLP) system and the (3+ 1)-dimensional Kadomtsev-Petviashvili (KP) equation. AIP Adv., 10(4) (2020)
Khan, K., Akbar, M.A.: Exact traveling wave solutions of Kadomtsev-Petviashvili equation. J. Egyptian Math. Soc. 23(2), 278–281 (2015)
Raza, N., Deifalla, A., Rani, B., Shah, N.A., Ragab, A.E.: Analyzing soliton solutions of the \((n+ 1)\)-dimensional generalized Kadomtsev-Petviashvili equation: Comprehensive study of dark, bright, and periodic dynamics. Results Phys. 56, 107224 (2024)
Seadawy, A.R., Iqbal, M., Lu, D.: Applications of propagation of long-wave with dissipation and dispersion in nonlinear media via solitary wave solutions of generalized Kadomtsev-Petviashvili modified equal width dynamical equation. Comput. Math. Appl. 78(11), 3620–3632 (2019)
Moslem, W.M., Abdelsalam, U.M., Sabry, R., El-Shamy, E.F., El-Labany, S.K.: Three-dimensional cylindrical Kadomtsev-Petviashvili equation in a dusty electronegative plasma. J. Plasma Phys. 76(3–4), 453–466 (2010)
Muatjetjeja, B., Moretlo, T., Adem, A.: Soliton solutions and other analytical solutions of a new (3+ 1)-dimensional novel KP like equation. Int. J. Nonlinear Anal. Appl. 14(1), 2623–2632 (2023)
Ahmad, J., Akram, S., Ali, A.: Analysis of new soliton type solutions to generalized extended (2+ 1)-dimensional Kadomtsev-Petviashvili equation via two techniques. Ain Shams Eng. J. 15(1), 102302 (2024)
Zahran, E.H., Khater, M.M.A.: Modified extended tanh-function method and its applications to the Bogoyavlenskii equation. Appl. Math. Model. 40(3), 1769–1775 (2016)
Alam, L.M.B., Jiang, X.: Exact and explicit traveling wave solution to the time-fractional phi-four and (2+1) dimensional CBS equations using the modified extended tanh-function method in mathematical physics. Part. Differ. Equ. Appl. Math. 4, 100039 (2021)
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK). Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Contributions
All authors contributed equally to this work.
Corresponding author
Ethics declarations
Conflict of interest
The authors has no Conflict of interest to declare that are relevant to the content
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Demirbilek, U., Nadeem, M., Çelik, F.M. et al. Generalized extended (2+1)-dimensional Kadomtsev-Petviashvili equation in fluid dynamics: analytical solutions, sensitivity and stability analysis. Nonlinear Dyn 112, 13393–13408 (2024). https://doi.org/10.1007/s11071-024-09724-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09724-3