
Abstract
Gain-dissipative Ising machines (GIMs) are dedicated devices that can rapidly solve combinatorial optimization problems. The noise intensity in traditional GIMs should be significantly smaller than its saturated fixed-point amplitude, indicating a lower noise margin. To overcome the existing limit, this work proposes an overdamped bistability-based GIM (OBGIM). Numerical test on uncoupled spin network show that the OBGIM has a different bifurcation dynamics from that of the traditional GIM. Moreover, the domain clustering dynamics on non-frustrated network proves that the overdamped bistability enables the GIM to suppress noise-induced random spin-state switching effectively; thus, it can function normally in an environment with a relatively large noise level. Besides, some prevalent frustrated graphs from the SuiteSparse Matrix Collection were adopted as MAXCUT benchmarks. The results show that the OBGIM can induce stochastic resonance phenomenon when solving difficult benchmarks. Compared with the traditional GIM, this characteristic makes the OBGIM achieve comparable solution accuracy in larger noise environment, thus achieving strong noise robustness.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In social life, people often need to group, sort, or filter sets of discrete events using specific optimization criteria. Such problems are collectively referred to as combinatorial optimization problems (COPs) and exist in various fields such as finance [1], machine learning [2, 3], image segmentation [4], and green logistics [5]. In computer science, many heuristic algorithms have been proposed to solve COPs [6]. Nonetheless, because most COPs are nondeterministic polynomial time (NP)-hard or NP-complete problems, the efficiency of solving COPs on traditional computers with the von Neumann architecture is limited [7]. To speed up the solution of COPs, physicists have proposed new heuristic strategies based on physical systems with non-von Neumann frameworks [8, 9]. One of the most famous solvers is the quantum annealing computer [10]. However, a high overhead is required to maintain the operation of an extremely low-temperature quantum device. Therefore, analog Ising machines based on gain-dissipative systems that can operate at room temperature have been proposed for various physical media, such as electromechanical [11], photonic [12,13,14], spintronic [15, 16], and circuit systems [17,18,19]. In the process of solving a COP using a gain-dissipative Ising machine (GIM), the cost function of the COP is firstly mapped to the Ising Hamiltonian of the Ising model [20]. Subsequently, under the interplay between the linear gain dynamics and nonlinear transfer function, the Ising Hamiltonian spontaneously evolves to the ground state in a short time [21].
In terms of nonlinearity, the existing transfer functions of most GIMs can be divided into four categories: polynomial [22], periodic [18], sigmoidal [21], and clipped functions [12]. The nonlinearities of GIM are designed to be bistable for simulating the symmetric bistability of the electronic spin. Previous experimental and theoretical reports have shown that the artificial spin states of these bistable GIMs can be easily switched by relatively large noise level, resulting in performance degradation [21, 23]. As a result, it is recommended that these bistable GIMs should operate at low noise levels to prevent the spin state from switching randomly. Specifically, when a bistable GIM evolves to a stable state, the fixed-point amplitude of the GIM must be much larger than the noise intensity. From the perspective of the second law of thermodynamics, a low noise level implies low entropy, which requires high energy to be maintained. Hence, for enhancing the robustness and reducing the power consumption, it is crucial to investigate approaches that enable bistable GIM to function normally in environments with a larger noise level.
Counterintuitively, in some specific nonlinear structures, systems can exploit noise to enhance their performance [24,25,26,27]. This indicates that such systems can operate in large-noise high-entropy states, thereby achieving low power consumption. An associated effect is known as stochastic resonance, where the information-carrying signal in a particular nonlinear structure is enhanced by noise energy [28]. An important feature of systems exhibiting stochastic resonance is the phenomenon of an initial increase followed by a subsequent decrease in performance with increasing noise level. This noise-induced bell-shaped trend has been extensively investigated across various disciplines, including machine learning [29, 30], signal processing [31, 32], machine fault monitoring [33, 34], and rehabilitation medicine [35, 36]. In addition, the stochastic resonance effect has also been observed in research on other types of Ising machine. For example, in Ising machines based on discrete spin systems [37, 38], small noise induces stochastic resonance by promoting the Ising Hamiltonian to escape the local minima. In the rectified linear unit-based GIM [39], the best performance can be achieved under adjustable large-noise-intensity conditions. Nevertheless, its spin amplitude easily diverges, resulting in high power consumption. Among the various nonlinearities with the stochastic resonance effect, overdamped bistability has the advantage of attenuating noise under any parameter condition [40]. This enables the overdamped bistability-based system to function normally with a small driving amplitude in a relatively large-noise-intensity environment. In addition, the saturation characteristic of the overdamped bistability makes it difficult for its output amplitude to diverge with appropriately selected parameters [41]. Although the overdamped bistability and polynomial nonlinearity in traditional GIMs may appear similar, significant differences in their dynamic characteristics exist. To the best of our knowledge, overdamped bistability-induced stochastic resonance have not been studied and observed in the traditional bistable GIMs.
In this study, we developed and numerically investigated an overdamped bistability-based GIM (OBGIM) with stochastic resonance phenomena in large noise condition. The bistable potential in OBGIM no longer plays a direct mapping role as it does in traditional GIMs, indicating that OBGIM inherently possesses faster relaxation dynamics. In the uncoupled state, we prove that the OBGIM has the different bifurcation dynamics compared with the traditional GIM. Besides, the results of a domain clustering dynamics task reveal that the OBGIM can suppress thermally induced random spin-state switching more effectively than the GIMs with traditional nonlinearity owing to the stochastic resonance characteristic of the former. Moreover, the OBGIM is benchmarked with frustrated MAXCUT problems. For difficult instances, OBGIM has been demonstrated to exhibit stochastic resonance effects in large-noise environments, allowing it to achieve comparable performance to that of the traditional GIM with small noise.
2 Traditional gain-dissipative Ising machine
2.1 Generalized gain-dissipative Ising machine model
The Ising model is a statistical description of the random spin phase transition in a ferromagnetic lattice [42]. Assuming that there are \(N\) lattice sites in the Ising model, the Hamiltonian of the ensemble without the influence of an external magnetic field can be written as:
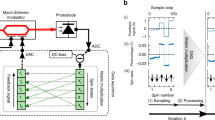
where \({\sigma }_{m}\in \left\{-1, 1\right\}\) represent the discrete variables of \(m\)-th spin and \({J}_{mn}\) is the spin coupling matrix, which reflects the strength of the exchange interaction between the two spins. As shown in Fig. 1a, the generalized GIM model is composed of a nonlinear transfer function and spin interaction module. In physical implementations, the spin interaction module is usually programmable, which facilitates the topology mapping of COPs like that illustrated in Fig. 1b [12, 13]. Through the loss introduced by feedback iteration, the whole system simulates the decline of the Ising Hamiltonian. Because many GIMs are not quantum systems, noise is utilized to help Ising Hamiltonian escape from local minima, as shown in Fig. 1c. If the time delay caused by the feedback structure is ignored, then the spin amplitude \({y}_{m}\) of the \(m\)-th spin of a GIM with a nontime-multiplexing structure can be expressed as follows [21]:
where \(F\), \(\alpha \), and \(\beta \) are the nonlinear transfer function, linear gain, and coupling strength, respectively. \({\xi }_{m}(t)\) represents the zero-mean unit-variance Gaussian noise, and its intensity is represented by \(\gamma \). However, considering that many GIMs are configured in a time-multiplexing structure [12, 19, 43, 44], the spin interaction module must wait for all artificial spins to complete the nonlinear mapping process; thus, the dynamic process of the GIM is not ideally continuous. Moreover, many physical configurations of GIMs lead to relatively slow dynamics of the nonlinear mapping process, which causes them to lose the property of small-step differentiation [12, 45]. In this case, the evolution process of the GIM can be described through the feedback iteration formula as follows [12]:
where \({x}_{m}\left[k\right]\) is the feedback driving signal of \(m\)-th spin and \(k\) is the iteration number. For the above two GIM mathematical models, after obtaining the spin amplitude \({y}_{m}\), the spin state can be determined using the signum function \({\sigma }_{m}={sgn}_{m}\left({y}_{m}\right).\) Then, the performance of GIM can be evaluated by specific indexes related to \({\sigma }_{m}\).

(a) Generalized model of a feedback system-based bistable GIM. Under the influence of the bistable nonlinear function, the spin amplitudes differentiate into spin up and spin down with iterative evolution. (b) Topological network of a COP, which can be mapped to the spin interaction part of the GIM. (c) The evolution of Ising Hamiltonian to the ground state. Because noise provides a finite temperature, Ising Hamiltonian can escape from the local minimum capture.
2.2 Discretization of the traditional GIM under slow dynamics
Here, we show an example of discretizing the traditional polynomial-bistability-based GIM under slow dynamics and large step size. The well-known degenerate optical parametric oscillator (DOPO)-based GIM was selected as the example. The dynamic process of the DOPO-based GIM is described by the following equations [46]:
where \({c}_{m}\) and \({s}_{m}\) represent the in-phase and quadrature optical field components of the \(m\)-th DOPO, respectively, and \(\rho \), \({A}_{s}\), and \(d{\xi }_{m}/dt\) denote the pump parameter, saturation amplitude, and noise term of the \(m\)-th DOPO, respectively. To couple pulses coherently to construct a GIM, each in-phase component \(\widetilde{{c}_{m}}\) was detected using a balanced homodyne detection method. After obtaining \(\widetilde{{c}_{m}}\) for each DOPO pulse, by modulating a series of optical pulses, a signal \(\widetilde{{f}_{m}}\) generated by the FPGA module is fed back into the cavity [13]. In theory, the in-phase component \(\widetilde{{c}_{m}}\) satisfies the following relationship:
where \(\Delta {\varphi }_{m}\), \(\beta \), and \(k\) are the phase differences in the coherent superposition, coupling strength, and iteration number, respectively. For the DOPO-based GIM, \(\Delta {\varphi }_{m}\left[k\right]\) must degrade to either 0 or \(\pi \), which indicates that the phase term \({\text{cos}}\left(\Delta {\varphi }_{m}\left[k\right]\right)\) in Eq. (7) can be either \(-1\) or \(1\). Therefore, the FPGA can generate the feedback signal \(\widetilde{{f}_{m}}\left[k+1\right]\) for the next iteration, according to the following equation:
To simplify Eqs. (5) and (6), we assume that the system operates under the parameters that yield the best performance, which requires \(\rho \to {1}^{+}\). In this case, because \(\widetilde{{f}_{m}}\) has no complex component, the quadrature optical-field component \({s}_{m}\), which cannot be bifurcated according to Eq. (6), is always significantly smaller than \({c}_{m}\). Therefore, \({s}_{m}\) can be ignored. In addition, when the DOPO-based GIM operates above the bifurcation threshold, the noise intensity is smaller than the spin amplitude. Thus, the multiplicative noise term can be replaced with an equivalent additive noise term. Through the above simplification, the dynamic process of DOPO described by Eqs. (5) and (6) can be expressed as follows:
Physically, \(\frac{d\widetilde{{\xi }_{m}}}{dt}\) can be considered as the quantum noise injected into the DOPO system and corresponds to the first-order differential Wiener process [46]. When the DOPO approaches the bifurcation threshold, \({c}_{m}\) changes slowly during each iteration [45]. Therefore, we can discretely map the continuous dynamics described by Eq. (9), using the Euler method with a large step size. Considering the injected feedback signal \(\widetilde{{f}_{m}}\) and assuming that the step size is 1, Eq. (9) can be rewritten as:
In fact, this discretization approach can also be found in other types of nonlinearities, such as periodic bistability [47], and can provide good agreement with experimental results.
3 Setup of overdamped bistability-based gain-dissipative Ising machine
3.1 Structure of OBGIM
Given that the nonlinear transfer function of most traditional GIMs can be expressed in polynomial form after Taylor expansion, we can represent the nonlinear mapping part of the traditional GIM [i.e., Eq. (4)] using the following equation:
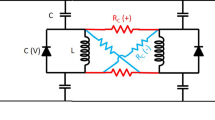
where \(b\) is an adjustable parameter of the bistability. Based on Eq. (5), a time-multiplexing GIM can be simulated by the circuit structure implemented in MATLAB/SIMULNK, as shown in Fig. 2a. Because there is no relaxation effect induced by small step-size differentials in the GIM shown in Fig. 2a, we refer to it as a non-relaxation bistable GIM (NBGIM). It is noteworthy that the NBGIM can be viewed as a polynomial-based GIM described by Eq. (10) with parameter renormalization, which has been previously reported in both theoretical [21] and experimental studies [46].

Simulated physical structures of (a) NBGIM and (b) OBGIM. (c) Nonlinear mapping function of NBGIM with \(b=1\). (d) The potential function \(U(y)\) of OBGIM with \(b=1\). The orange ball represents a Brownian particle subject to input driving and overdamping force of the system, and the projection of its motion trajectory on the horizontal axis is the output spin amplitude \(y\). Output of nonlinear mapping part in the OBGIM when a sinusoidal signal with \(A=0.35\) and noise with intensity (e) \(\gamma =0.06\), (f) \(\gamma =0.6\), and (g) \(\gamma =6\) is input. Output of nonlinear mapping part in the NBGIM when a sinusoidal signal with A = 0.35 and noise with intensity (h) \(\gamma =0.06\), (i) \(\gamma = 0.6\), and (j) \(\gamma = 6\) is input
To prevent small-step differentiation from degrading into a direct nonlinear mapping under slow dynamics, an additional integrator should be introduced into the framework shown in Fig. 2a. The modified GIM structure is illustrated in Fig. 2b, and its nonlinear dynamics can be described by the following continuous differential equation:
where \(b{y}^{3}-y\) is the derivative of the system potential function \(U(y)\). In contrast to the NBGIM, whose nonlinear mapping is constrained by the \({x}_{m}\left[k\right]-b{{x}_{m}\left[k\right]}^{3}\) curve illustrated in Fig. 2c, the OBGIM does not perform direct mapping through \(b{y}^{3}-y\). As shown in Fig. 2d, the output amplitude is determined by the projection of the particle trajectory in the y-axis direction within the potential well \(U(y)\), which is driven by external input. During motion, the presence of relaxation effects results in the information-carrying particle being unable to land directly on the static attractor curve [40], which implies faster dynamics of OBGIM compared to that of NBGIM. For the time-multiplexing NBGIM and OBGIM, spin amplitude evolution of each spin during every iteration involves 20 discrete sampling points. During spin interaction computations, only the spin amplitude value of each spin at the last sampling point of that iteration is utilized.
As shown in Fig. 2d, in an overdamped system, Brownian particles always experience damping forces acting in the opposite direction to the external driving forces during their motion [40]. If the noise energy is too weak to cause external driving signal forced Brownian particles to cross the potential barrier, the output signal vibrates on one side of the potential well [40]. Figure 2e shows such an example, where the input of nonlinear mapping part in the OBGIM is a sinusoidal wave with an amplitude \(A\) of 0.35 and a Gaussian white noise term with \(\gamma =\) 0.06. Owing to the system damping, although the noise is weakened, the output can only vibrate in the negative potential well, and its amplitude is attenuated. If the noise intensity \(\gamma \) is increased to 0.6, the energy of input containing noise is sufficient to make the Brownian particle hop between the two potential wells, as shown in Fig. 2f. Because the hopping process is accompanied by the transfer of noise energy to signal [48], the noise component in the output signal is significantly suppressed. From Fig. 2e–g, one can expect the noise component in the OBGIM to be suppressed naturally, regardless of whether the Brownian particle can transition between the two potential wells. In contrast, the nonlinear mapping part in the NBGIM does not exhibit similar overdamping effects. Therefore, as shown in Fig. 2h–j, for the same input conditions, the output quality of the nonlinear mapping part in NBGIM is worse than that in OBGIM.
3.2 Simulation setup
All the circuit modules used for simulation can be found in the Simulink Library Browser. The Fcn is the function module, which can be physically implemented by multiplier circuits. The FPGA module for spin coupling can be simulated by a custom module. Compared with the traditional NBGIM, the nonlinear mapping part of the OBGIM retains the differential term, which necessitates small computation step size. Thus, for the simulation of the OBGIM, the discrete step size is set to 0.1. To ensure fairness, the discrete step size for simulating the NBGIM is set to 0.1, even though the structure of NBGIM inherently incorporates the condition of a large step size.
In domain clustering dynamics and MAXCUT benchmark tests, parameter traversal was employed to determine the optimal \(\alpha \) and \(\beta \) corresponding to optimal performance indexes. The traversal range for a and b was (0, 2 \(\Lambda \)], with a step size of 0.01. For each candidate parameter set, 100 independent repeated experiments were conducted. In accordance with the previous research [12], the initial amplitudes of all artificial spins were set to zero while solving the MAXCUT problem.
4 Results and discussion
4.1 Bifurcation dynamics of uncoupled spins
Owing to the symmetry of the spin state, an isolated real electron spin should behave as a spin-down or spin-up with equal probability. Consequently, to demonstrate the ability to simulate electron spins correctly, it is necessary to study the bifurcation dynamics of the OBGIM in the uncoupled state, that is, \({J}_{mn}=0\) [12]. Figures 3a–c illustrates the spin amplitude evolution of 100 uncoupled artificial spins generated by the NBGIM (\(b=1\)) with different linear gains \(\alpha \) under a noise floor of \(\gamma =0.01\). When \(\alpha =0.8\), the linear gain is too small to induce bifurcation of spin amplitudes, as shown in Fig. 3a. If \(\alpha \) is increased to 1.1, the artificial spins bifurcate into two symmetric states with equal probability, as shown in Fig. 3b. The stable spin amplitude can increase with the further increase of \(\alpha \), as shown in Fig. 3c. However, as previously reported, when the noise intensity is at the same order of magnitude as the spin amplitude, the spin states of NBGIM flip frequently due to excessive thermal disturbance. Therefore, the stable symmetric bimodal landscape cannot be realized by the NBGIM with \(\gamma =0.1\) at any value of \(\alpha \), as shown in Fig. 3d–f.

Spin amplitude evolution cases of 100 isolated spins mapped by NBGIM with (a) \(\alpha =0.8\), \(\gamma =0.01\), (b) \(\alpha =1.1\), \(\gamma =0.01\), (c) \(\alpha =1.4\), \(\gamma =0.01\), (d) \(\alpha =0.8\), \(\gamma =0.1\), (e) \(\alpha =1.1\), \(\gamma =0.1\), and (f) \(\alpha =1.4\), \(\gamma =0.1\). The parameter \(b\) is set as 1
Because the stable spin amplitude of the OBGIM is one order of magnitude greater than that of NBGIM, the noise intensity tested on the uncoupled OBGIM was also increased by one order of magnitude accordingly. Figure 4a–c illustrates the spin amplitude evolution of 100 uncoupled artificial spins generated by the OBGIM with different linear gains \(\alpha \) under a noise floor of \(\gamma =0.1\). Under this noise floor, the spin amplitudes of the OBGIM only evolve in a single potential well, which is distinct from the GIM studied in previous research [21]. This is mainly because small noise cannot generate enough thermal disturbance to overcome the damping force in the overdamped bistability. Even when the noise intensity is increased to \(\gamma =1\), the artificial spins with small linear gain \(\alpha =1\) cannot cross the potential barrier to complete bifurcation, as shown in Fig. 4d. With further increasing \(\alpha \), the possibility of an artificial spin crossing potential barrier increases. From \(\alpha =2\), a clear bifurcation behavior is observed in Fig. 4e, f, where the ratio of spin-up to spin-down is close to 1:1. In addition, an increase in \(\alpha \) makes the stable spin amplitude increase. The above phenomena prove that the NBGIM and OBGIM can correctly simulate two symmetric electron spin states under appropriate parameters.

Spin amplitude evolution cases of 100 isolated spins mapped by OBGIM with (a) \(\alpha =1\), \(\gamma =1\), (b) \(\alpha =1\), \(\gamma =1\), (c) \(\alpha =1\), \(\gamma =1\), (d) \(\alpha =1\), \(\gamma =1\), (e) \(\alpha =1\), \(\gamma =1\), and (f) \(\alpha =1\), \(\gamma =1\). The parameter \(b\) is set as 1
Notably, the stable spin amplitudes of the NBGIM and OBGIM first increase and tend to saturation with the increase of \(\alpha \). The maximum absolute value of the stable spin amplitude that the system can achieve is referred to as the saturated fixed-point amplitude. Figure 5 shows the saturated fixed-point amplitudes of the NBGIM and OBGIM with different \(b\). It is clear that with decreasing \(b\), the saturated fixed-point amplitudes of the NBGIM and OBGIM gradually increase. Previous reports have implied that the magnitude of the saturated fixed-point amplitude relative to the noise intensity determines the performance of the GIM [21]. Thereby, in the subsequent sections, to ensure a fair performance comparison among GIMs with different nonlinearities, we introduce the relative noise level as follows:
where \(\Lambda \) represents the saturated fixed-point amplitude. The noise condition corresponding to \(\eta >1\) is considered as the large noise condition. It is worth noting that in this study, \(\eta \) was regulated by tuning \(\Lambda \). Even with different \(\Lambda \), the noise conditions of the different GIMs are considered to be the same as long as \(\eta \) is the same.

Saturated fixed-point amplitudes of the NBGIM and OBGIM with different parameter \(b\)
4.2 Domain clustering dynamics
Domain clustering dynamics provide a benchmark for observing the evolution of an annealing device from a randomly excited state to a ground state on a ferromagnetic square lattice (FSL) topology, as shown in Fig. 6a. Because an FSL is a topology without frustration, the temporary irregular domains generated in the evolution process are mainly caused by thermal disturbances, which prevent the energy of the annealer arriving at the ground state [23]. Therefore, the domain clustering dynamics benchmark can be employed to measure the effective temperature of the annealer, which has been verified using the Metropolis–Hastings algorithm [23], quantum annealing hardware [49], and coherent Ising machine [50].

(a) Configuration of an FSL with a size of \(N=100\) spins. The grey circles at the vertices are mapped to artificial spins. Each orange line represents \({J}_{mn}=1\), which is considered to be a ferromagnetic connection between the two artificial spins. (b) Randomly disrupted spin states before the domain clustering benchmark on the FSL. The spin states of the vertices are visualized by the squares. The spin-down state is depicted by a blue square, whereas the spin-up state is depicted by an orange square. (c) Energy evolution of OBIMs with different dynamic processes. Domain clustering dynamic snapshots of the OBGIMs with (d) \(\eta =1\) and (e) \(\eta =3\). (f) Success rates \({P}_{s}\) and (g) generated temporary domain number per iteration of GIMs based on the NBGIM and OBGIM (\(b=2, 1, 0.5\)) in searching the ground state of the FSL
For fair comparison of the abilities of different GIMs to find the ground state of the FSL under different conditions, we adopted an index called success rate \({P}_{s}\), which was used to assess the probability of the GIM reaching the ground state within 500 iterations. For the initial state of the domain clustering test, we randomly generate 10 sets of FSL graphs consisting of 100 artificial spins with an equal ratio of spin-up and spin-down states, as illustrated in Fig. 6b. The final \({P}_{s}\) is obtained by averaging the results of 100 independent repeated experiments conducted on all generated initial FSL graphs. By traversing the parameters of \(\alpha \) and \(\beta \), the maximum \({P}_{s}\) can be determined. During the test, we found three possibilities for the evolution dynamics of GIMs, as shown in Fig. 6c. The first case successfully determines the evolution of the ground state without spin amplitude divergence. In the second case, the Ising Hamiltonian converges to a local optimum. Although it is difficult to diverge the output from the OBGIM with appropriate working settings, inappropriate parameter settings or excessive noise levels can diverge the spin amplitude, which is the third case. When the spin amplitude is divergent in the same direction, all spins are in the same state, which coincides with the ground-state landscape of the FSL. Thus, in the subsequent parameter traversal, we eliminate the case of spin amplitude divergence. By observing the domain clustering snapshots of the GIM under different \(\eta \), one can see that with increasing \(\eta \), the probability of generating temporary irregular domains also increases. For example, comparing Fig. 6d, when \(\eta =3\), the OBGIM has more difficulty arriving at the ground state due to the greater probability of generating a temporary domain, as shown in Fig. 6e. Hence, for further quantitative assessment of the impact of the thermal disturbance, we counted the generated temporary domain number per iteration as another evaluation index while calculating the highest value of \({P}_{s}\).
Figure 6f, g show a quantitative comparison of \({P}_{s}\) and the generated temporary domain number per iteration between GIMs with different nonlinearities. When \(\eta =0.2\), although all six nonlinearities enable the GIM to find the ground state of the FSL with a 100% success rate, the OBGIM almost completely inhibits the generation of thermally induced temporary domains. When \(\eta \ge 1\), the \({P}_{s}\) of the NBGIMs with different \(b\) plummet to 0 and the numbers of generated temporary domains per iteration increase to more than 16. However, three OBGIMs can still maintain a 100% success rate of reaching the ground state when \(\eta \le 3\). When \(\eta =5\), all GIMs cannot reach the ground state. In this case, around 11 temporary domains per iteration are generated in the OBGIMs, which is significantly lower than around 24 in the NBGIM cases. It is noteworthy that the difference in \(b\) does not change the performance of the OBGIM and NBGIM. Hence, for environments with fixed noise intensity \(\gamma \), the significance of modulating \(b\) is to change \(\eta \) by affecting the saturated fixed-point amplitudes of NBGIM and OBGIM. The above results reveal that compared with NBGIM, the OBGIM has a significantly stronger ability to suppress random spin-state switching under large noise condition. This is primarily attributed to the overdamping characteristic of the OBGIM in attenuating thermal disturbance.
4.3 Performance on MAXCUT problems with frustration
In the real world, the topologies of COPs usually have frustration characteristics. The frustration resulting in local energy minima and critical slowing down makes these problems challenging [51]. To evaluate the performance of the OBGIM further, frustrated MAXCUT problems were adopted. A MAXCUT problem requires the solver to divide the vertices of a given graph into two subsets to maximize the number of connected edges [52]. In the process of solving real-world problems, we usually cannot know the true solution in advance; thus, the ability to solve problems within a given time is more important for GIM. Considering this point, we adopted eight graphs from the SuiteSparse Matrix Collection as benchmarks, ranging in size from 800 to 2000 spins. These random sparse graphs, known as G-sets [53], are often considered difficult, and no researchers know their exact ground states. Therefore, during parameter traversal, it is no longer the goal to maximize the success rate \({P}_{s}\), but rather to maximize the normalized cut value \(\widetilde{C}\), as expressed in the following equation:
where \({\Omega }_{neg}\) and \({\Omega }_{opt}\) are the negative edge number and best-known cut value, respectively, from a previous report [54]. Table 1 provides basic information about the selected G-set graphs and the performance of the coherent Ising machine for solving the corresponding benchmarks for 1000 roundtrips. \(\langle C\rangle \) and \(C\) represent the average and best \(\widetilde{C}\) values obtained from 100 independent repeated trials, respectively. For a certain G-set graph, we specified that the reported \(\langle C\rangle \) value of the coherent Ising machine is the borderline. When the normalized cut value of the GIM is greater than the borderline, the GIM can approach the ground state; otherwise, it cannot approach the ground state. For a fair comparison with the experimental data, the maximum iteration number in the parameter traversal was set to 1000.
Firstly, the G15 graph with 800 spins was used as an example to study the evolutionary dynamics of two GIMs. As depicted in Fig. 7a–c, NBGIM (\(b=1\)) can achieve a larger cut value than the borderline when \(\eta =0.2\). For both \(\eta =1\) and \(3\), NBGIM fails to approach the ground state. Unlike previously reported GIM with small noise [46], no clear macroscopic bifurcation landscape of artificial spins can be observed in the NBGIM under any of the three \(\eta \), as shown in Fig. 7d–f. To understand the differences in the NBGIM with different \(\eta \), evolution examples of a single spin in three noise conditions are provided in Fig. 7g–i. At \(\eta =0.2\), the artificial spin in the NBGIM may switch state due to larger instantaneous disturbances. However, it still undergoes oscillations near the fixed point with relatively small amplitude for most of the time. This evolution dynamics is similar to that of the polynomial nonlinearity-based optical GIM with large freeze-out time [23]. In this case, the switching of spin states is an evaporation process of temporary domain wall in the system. As a result, the cut value of the NBGIM gradually moves towards the ground state as the iteration progresses. Conversely, for \(\eta =1\) and \(3\), the amplitude of each spin in the NBGIM frequently switches around 0. This dynamics is akin to Monte Carlo methods at higher system temperatures, which deviate from the ground state due to frequently generated irregular temporary domains [23].

Normalized cut value evolution cases of NBGIM (\(b=1\)) with (a) \(\eta =0.2\), (b) \(\eta =1\), and (c) \(\eta =3\) on solving G15 graph. Spin amplitude evolution cases of 800 spins mapped by NBGIM (\(b=1\)) with (d) \(\eta =0.2\), (e) \(\eta =1\), and (f) \(\eta =3\) on solving G15 graph. The red dotted line represents \(\langle C\rangle \) of solving G15 by coherent Ising machine, which is considered as the borderline. Spin amplitude evolution cases of a single spin mapped by NBGIM (\(b=1\)) with (g) \(\eta =0.2\), (h) \(\eta =1\), and (i) \(\eta =3\) on solving G15 graph
Different from the NBGIM, the OBGIM is unable to approach the ground state at \(\eta =0.2\). In contrast, it can approach the ground state at \(\eta =1\) and \(3\), as illustrated in Fig. 8a–c. The amplitude evolution in Fig. 8d shows that artificial spins in the OBGIM have a clear bifurcation landscape, with almost no spin-state switching after the initial transitional stage (after the 100th iteration). According to the previous discussion of Fig. 6, the noise weakened by the overdamping characteristic of the OBGIM can hardly produce effective thermal disturbance. Hence, one can expect artificial spins in the OBGIM are frozen due to the weak thermal disturbance at \(\eta =0.2\). This conclusion is further proved by the evolution of a single spin at \(\eta =0.2\) in the OBGIM shown in Fig. 8g, where the spin amplitude undergoes weak oscillations near the fixed point after the initial transitional stage. When \(\eta =1\) and \(3\), the bifurcation landscape in the OBGIM cannot be observed anymore, as shown in Fig. 8h, i. By comparing Figs. 7g–i and Fig. 8h, i, it is clear that the evolution of artificial spins in the OBGIM when \(\eta =1\) and \(3\) is similar to that in NBGIM when \(\eta =0.2\). In these two cases, the noise weakened by the overdamping characteristic of the OBGIM can still switch spin states to help the Ising Hamiltonian escape from local minima. Thus, the cut value of the OBGIM can evolve towards the ground state in environments with relatively large noise.

Normalized cut value evolution cases of OBGIM (\(b=1\)) with (a) \(\eta =0.2\), (b) \(\eta =1\), and (c) \(\eta =3\) on solving G15 graph. The red dotted line represents \(\langle C\rangle \) of solving G15 by coherent Ising machine, which is considered as the borderline. Spin amplitude evolution cases of 800 spins mapped by OBGIM (\(b=1\)) with (d) \(\eta =0.2\), (e) \(\eta =1\), and (f) \(\eta =3\) on solving G15 graph. Spin amplitude evolution cases of a single spin mapped by OBGIM (\(b=1\)) with (g) \(\eta =0.2\), (h) \(\eta =1\), and (i) \(\eta =3\) on solving G15 graph
Table 2 shows the average and best normalized cut values \(\langle C\rangle \) and \(C\) of the NBGIM (\(b=1\)) and OBGIM (\(b=1\)) when solving each G-set graph under different \(\eta \). The NBGIM loses the ability to approach the ground state of the G-set graphs after \(\eta \ge 1\), which is consistent with its trend when solving the G15. For the OBGIM, within the range of \(\eta \in [0.2, 3]\), \(\langle C\rangle \) and \(C\) increase with increasing \(\eta \). This tendency occurs because all G-set graphs have complex energy landscapes as the G15, which requires greater thermal disturbance. With increasing \(\eta \), the increasing noise disturbance makes the ability of the OBGIM to eliminate the local minimum capture stronger, resulting in larger \(\langle C\rangle \) and \(C\) values. It is noteworthy that the NBGIM and OBGIM cannot approach the ground state of the G-set owing to the excessive noise disturbance when \(\eta \ge 5\). Consequently, in general, \(\langle C\rangle \) and \(C\) of the OBGIM firstly increase and then decrease, which is consistent with the bell-shaped curves of stochastic resonance phenomena in other systems [56,57,58]. Although Table 2 only provides performance indexes of NBGIM and OBGIM with \(b=1\), there is no significant difference in the performance of both systems with \(b=0.5\) and \(2\) (see Supplementary Note 1 for further details). This finding further suggests that the parameter \(b\) has no effect on the performance of OBGIM when \(\eta \) is fixed. From another perspective, for different operating conditions with a fixed noise intensity \(\gamma \), one can achieve the optimal performance of OBGIM by adjusting \(b\) to change its \(\eta \).
4.4 Theoretical analysis of spin bifurcation
From the numerical results, one can know that NBGIM and OBGIM exhibit distinct bifurcation dynamics. To better understand the difference, theoretical analysis is given in this section. Firstly, for NBGIM, combining Eqs. (3) and (11) yields the following expression:
At the fixed points of NBGIM, the stable state satisfies \({y}_{m}\left[k+1\right]={y}_{m}\left[k\right]\) and \(\gamma {\xi }_{m}[k]=0\). Moreover, for the convenience of bifurcation threshold calculation, assuming \(\alpha {y}_{m}\left[k\right]\ge \beta \sum_{1\le n\le N}{J}_{mn}{y}_{n}[k]\) is reasonable to provide a good approximation [12]. Thus, Eq. (15) can be rewritten as:
Assuming the amplitude of the m-th spin is denoted by \({y}_{m}={\sigma }_{m}{v}_{m}y\), where \(y\) and \({v}_{m}\) represent uniform amplitude and non-uniform factor with a mean value of 1, respectively, the following equation can be obtained:
In instances where \(x>0\), the summation over all spins results in:
For a non-trivial fixed point (\(x\ne 0\)) to exist, the right-hand side must exceed zero. This gives rise to the following inequality for NBGIM, which delineates the condition for bifurcation:
Clearly, for the uncoupled case (\({J}_{mn}=0\)), \(\alpha =1\) is the bifurcation point for NBGIM. This explains why bifurcation behavior occurs in NBGIM only when \(\alpha >1\), as presented in Sect. 4.1. For complex COP topologies like G15, under low-noise conditions, the NBGIM with appropriate parameter can also exhibit a bifurcation (see Supplementary Note 2 for further details). Nevertheless, in the large-noise environment focused on in this work, even if the bifurcation conditions are met, the spin amplitudes of NBGIM will be dominated by noise fluctuations, as shown in Fig. 7.
Then, an analysis of the bifurcation condition of OBGIM is carried out. Without the slow dynamics condition, the nonlinear part of OBGIM described by Eq. (12) cannot be solved analytically. For the sake of theoretical analysis, we express Eq. (12) in the following form:
where \(G=\alpha {y}_{m}+\beta \sum_{1\le n\le N}{J}_{mn}{y}_{n}+\gamma {\xi }_{m}\) represents the excitation composed of feedback signals and noise. Let \(\frac{d{y}_{m}}{dt}=0\), the left side of the equation represents the attractor curve of OBGIM, as shown in Fig. 9a. The dashed region between critical points A and B is the unstable region, indicating the area where the system output cannot converge. Due to the presence of the unstable region, the particle motion between the two potential wells is accomplished through transitions, as depicted in Fig. 9b, c. This transition process is accompanied by short-term memory effect and amplitude enhancement of weak driving signals. If the external excitation applied to the particle is small, its trajectory is confined to one side of the two potential wells, as shown in Fig. 9d, e. Only when the energy provided by the external excitation including noise is sufficiently large, the particle can cross the unstable region, as illustrated in Fig. 9d, f. According to previous report [40], transition can occur at least when the amplitude of the external excitation is greater than the absolute value of the y-coordinate of the critical point. In other words, it needs to satisfy the following equation:

(a) Attractor curve of nonlinearity in the OBGIM. The yellow line represents the instantaneous value \(G({t}_{0})\) of the external excitation, and its intersections with the attractor curve determine the current position of the attractor. (b) Output of nonlinear mapping part in the OBGIM and (c) the trajectories of Brownian particles on the attractor curve when a pure sinusoidal signal with \(A=0.7\) is input. (d) Outputs of nonlinear mapping part in the OBGIM when a sinusoidal signal with \(A=0.35\) is input. The green line represents the output without injecting noise into the input. When injecting noise with \(\gamma =0.35\) into the input, the system output is represented by the orange line. The trajectories of Brownian particles on the attractor curve corresponding to (e) pure output and (f) output when injecting noise into the input
It is worth noting that Eq. (21) is a necessary but not sufficient condition to determine the bifurcation of OBGIM. For instance, under the uncoupled condition (\({J}_{mn}=0\)), if the noise intensity is too small, even though the linear gain \(\alpha \) continuously increases the value of \(G\), satisfying Eq. (21), OBGIM may still struggle to undergo bifurcation. This is because, in the initial stages of evolution, particles moving only to one side result in each spin of OBGIM having the same-sign \(G\). With the increase in the \(\alpha \), the small noise intensity cannot cause a sign change in \(G\), implying that the attractor of each spin remains on the same side of the y-coordinate axis. Therefore, regardless of the value of \(\alpha \), OBGIM cannot bifurcate under this condition, like the results shown in Fig. 4a–c. Bifurcation occurs only when the noise intensity is enough large with an appropriate \(\alpha \), causing \(G\) values of some spins to have a different sign from those of other spins, as presented in Fig. 4e, f. When solving for complex COPs such as G15, the influence of the coupling term \(\beta \sum_{1\le n\le N}{J}_{mn}{y}_{n}\) in \(G\) allows OBGIM to bifurcate under a relatively small noise condition compared with the uncoupled situation, as shown in Fig. 8d. Notably, some of the energy consumed during the transition of particles between the two potential wells of OBGIM is provided by the noise. This also confirms the suppression ability of OBGIM on random spin switching under large noise conditions.
5 Conclusion
In this study, we developed an overdamped bistability-based GIM for low-power-consumption combinatorial optimization computing. Firstly, we demonstrated that the OBGIM can accurately simulate isolated spins, although it requires a larger noise level than the NBGIM to produce a clear bifurcation. Then, the domain clustering dynamics test proved that the OBGIM can effectively suppress noise-induced spin-state switching compared with the traditional nonlinearity-based NBGIM. Subsequently, benchmarking on frustrated MAXCUT problems revealed that the performance of the OBGIM with a large noise level (\(\eta =\) 3) is comparable to that of NBGIM with a relatively small noise level (\(\eta =\) 0.2). Previous viewpoint holds that the performance of GIM decreases monotonically with increasing noise level and requires \(\eta \ll 1\); thus, the stochastic resonance phenomena cannot be observed in GIM under large noise conditions [21, 23]. However, the results in this study reveal that the stochastic resonance phenomena of GIM under large noise conditions can be expected with an appropriate system structure. It is worth mentioning that the occurrence of stochastic resonance phenomena in GIM requires not only an appropriate nonlinear structure but also a relatively complex COP being solved by the system. For simple COPs, even OBGIM may not be able to induce stochastic resonance phenomena (see Supplementary Note 3 for further details). In this scenario, the primary advantage of OBGIM over NBGIM is its superior noise robustness.
In conclusion, we proved the effectiveness of the proposed OBGIM, which provides insights for building a new physical GIM with large noise margin. As previously mentioned, the ability of OBGIM to operate in large-noise environments implies its potential for achieving lower power consumption compared to traditional GIMs. However, it is difficult to quantitatively discuss the power consumption of GIMs without detailed physical implementation. This is due to the fact that the same nonlinearity may be realized through different physical media [12, 59], resulting in different dynamic scales. If assuming that the NBGIM and OBGIM are both constructed using circuits with the same driving level, we can estimate that the power consumption of OBGIM is significantly lower than that of NBGIM (see Supplementary Note 4 for further details). However, it is important to note that this comparison is provided for reference purposes only. In addition, in solving the G-set, we noticed that the OBGIM is not superior to the traditional nonlinearity-based NBGIM in terms of \(C\) value. Therefore, referring to existing improvement technologies for traditional GIMs [44, 55, 60], some attempts to improve the performance of OBGIM should be conducted in future research. Additionally, a nonlinearity can exhibit different dynamics in different thermal baths [61,62,63], except for Gaussian white noise. Hence, it is also meaningful to investigate the effects of other types of noise on the performance of the OBGIM.
Data availability
The authors declare that all relevant data are included in the manuscript. Additional data are available from the corresponding author upon reasonable request.
References
Cornuejols, G. & Tütüncü, R.: Optimization methods in finance. Vol. 5 (Cambridge University Press, 2006).
Song, M., Li, H., Sun, C., Cai, D. & Hong, S. Dlsa: Semi-supervised partial label learning via dependence-maximized label set assignment. Inf. Sci. (2022).
Song, M., Sun, C., Cai, D., Hong, S., Li, H.: Classifying vaguely labeled data based on evidential fusion. Inf. Sci. 583, 159–173 (2022)
Bhandarkar, S.M., Zhang, H.: Image segmentation using evolutionary computation. IEEE Trans. Evol. Comput. 3, 1–21 (1999)
Sbihi, A., Eglese, R.W.: Combinatorial optimization and green logistics. Ann. Oper. Res. 175, 159–175 (2010)
Yang, X.-S.: Nature-inspired optimization algorithms: Challenges and open problems. J. Comput. Sci. 46, 101104 (2020)
Garey, M. R. & Johnson, D. S.: Computers and intractability. Vol. 174 (freeman San Francisco, 1979).
Albash, T., Hen, I.: Future of physical quantum annealers: impediments and hopes. Sci. Cult. 85, 163–170 (2020)
Mohseni, N., McMahon, P. L. & Byrnes, T.: Ising machines as hardware solvers of combinatorial optimization problems. Nat. Rev. Phys. 1–17 (2022).
Izquierdo, Z.G., Hen, I., Albash, T.: Testing a quantum annealer as a quantum thermal sampler. ACM Trans. Quant. Comput. (2021). https://doi.org/10.1145/3464456
Mahboob, I., Okamoto, H., Yamaguchi, H.: An electromechanical ising hamiltonian. Sci. Adv. 2, e1600236 (2016)
Böhm, F., Verschaffelt, G., Van der Sande, G.: A poor man’s coherent Ising machine based on opto-electronic feedback systems for solving optimization problems. Nat. Commun. 10, 1–9 (2019)
Inagaki, T., et al.: A coherent Ising machine for 2000-node optimization problems. Science 354, 603–606 (2016)
Marandi, A., Wang, Z., Takata, K., Byer, R.L., Yamamoto, Y.: Network of time-multiplexed optical parametric oscillators as a coherent Ising machine. Nat. Photonics 8, 937–942 (2014)
Mondal, A., Srivastava, A.: Ising-FPGA: A Spintronics-based Reconfigurable Ising Model Solver. ACM Trans. Des. Autom. Electronic Syst. 26, 1–27 (2020)
Borders, W.A., et al.: Integer factorization using stochastic magnetic tunnel junctions. Nature 573, 390–393 (2019)
Yamaoka, M., et al.: A 20k-spin Ising chip to solve combinatorial optimization problems with CMOS annealing. IEEE J. Solid-State Circuits 51, 303–309 (2015)
Chou, J., Bramhavar, S., Ghosh, S., Herzog, W.: Analog coupled oscillator based weighted Ising machine. Sci. Rep. 9, 1–10 (2019)
Yamamoto, K. et al.: in Proceedings of the 8th International Symposium on Highly Efficient Accelerators and Reconfigurable Technologies. 1–6.
Lucas, A.: Ising formulations of many NP problems. Front. Phys. 2, 5 (2014)
Böhm, F., Van Vaerenbergh, T., Verschaffelt, G., Van der Sande, G.: Order-of-magnitude differences in computational performance of analog Ising machines induced by the choice of nonlinearity. Commun. Phys. 4, 1–11 (2021)
Wang, Z., Marandi, A., Wen, K., Byer, R.L., Yamamoto, Y.: Coherent Ising machine based on degenerate optical parametric oscillators. Phys. Rev. A 88, 063853 (2013)
Böhm, F., et al.: Understanding dynamics of coherent Ising machines through simulation of large-scale 2D Ising models. Nat. Commun. 9, 1–9 (2018)
Hu, Z., Wang, J., Hao, X., Li, K.: Gating function based on transmission delays and stochastic resonance in motif network with FPGA implementation. Nonlinear Dyn. 108, 2731–2749 (2022). https://doi.org/10.1007/s11071-022-07292-y
Yao, Y.: Logical chaotic resonance in the FitzHugh–Nagumo neuron. Nonlinear Dyn. 107, 3887–3901 (2022). https://doi.org/10.1007/s11071-021-07155-y
Yan, Z., Guirao, J.L.G., Saeed, T., Chen, H., Liu, X.: Analysis of stochastic resonance in coupled oscillator with fractional damping disturbed by polynomial dichotomous noise. Nonlinear Dyn. 110, 1233–1251 (2022). https://doi.org/10.1007/s11071-022-07688-w
Christensen, R.K., Lindén, H., Nakamura, M., Barkat, T.R.: White noise background improves tone discrimination by suppressing cortical tuning curves. Cell Rep. 29, 2041-2053.e2044 (2019). https://doi.org/10.1016/j.celrep.2019.10.049
Gammaitoni, L., Hänggi, P., Jung, P., Marchesoni, F.: Stochastic resonance. Rev. Mod. Phys. 70, 223 (1998)
Chen, Z., Duan, F., Chapeau-Blondeau, F., Abbott, D.: Training threshold neural networks by extreme learning machine and adaptive stochastic resonance. Phys. Lett. A 432, 128008 (2022)
Ikemoto, S.: Noise-modulated neural networks for selectively functionalizing sub-networks by exploiting stochastic resonance. Neurocomputing 448, 1–9 (2021)
Ren, Y., Pan, Y., Duan, F.: SNR gain enhancement in a generalized matched filter using artificial optimal noise. Chaos, Solitons Fractals 155, 111741 (2022)
Liu, J., Qiao, Z., Ding, X., Hu, B., Zang, C.: Stochastic resonance induced weak signal enhancement over controllable potential-well asymmetry. Chaos, Solitons Fractals 146, 110845 (2021)
Zhai, Y., Fu, Y., Kang, Y.: Incipient bearing fault diagnosis based on the two-state theory for stochastic resonance systems. IEEE Trans. Instrum. Meas. 72, 1–11 (2023). https://doi.org/10.1109/TIM.2023.3241066
Wang, Z., Yang, J., Guo, Y.: Unknown fault feature extraction of rolling bearings under variable speed conditions based on statistical complexity measures. Mech. Syst. Signal Process. 172, 108964 (2022)
Duan, F., Duan, L., Chapeau-Blondeau, F., Ren, Y., Abbott, D.: Binary signal transmission in nonlinear sensors: Stochastic resonance and human hand balance. IEEE Instrum. Meas. Mag. 23, 44–49 (2020)
Yashima, J., Kusuno, M., Sugimoto, E., Sasaki, H.: Auditory noise improves balance control by cross-modal stochastic resonance. Heliyon 7, e08299 (2021)
Roques-Carmes, C., et al.: Heuristic recurrent algorithms for photonic Ising machines. Nat. Commun. 11, 1–8 (2020)
Pierangeli, D., Marcucci, G., Brunner, D. & Conti, C.: Noise-enhanced spatial-photonic Ising machine. Nanophotonics 1 (2020).
Liao, Z. et al.: Nonbistable rectified linear unit-based gain-dissipative Ising spin network with stochastic resonance effect. J. Comput. Sci. (2022).
Liao, Z., Wang, Z., Yamahara, H., Tabata, H.: Low-power-consumption physical reservoir computing model based on overdamped bistable stochastic resonance system. Neurocomputing 468, 137–147 (2021)
Li, M., Shi, P., Zhang, W., Han, D.: A novel underdamped continuous unsaturation bistable stochastic resonance method and its application. Chaos, Solitons Fractals 151, 111228 (2021)
Cipra, B.A.: An introduction to the Ising model. Am. Math. Mon. 94, 937–959 (1987)
Honjo, T. et al.: 100,000-spin coherent Ising machine. Sci. Adv. 7, eabh0952 (2021).
Reifenstein, S., Kako, S., Khoyratee, F., Leleu, T., Yamamoto, Y.: Coherent Ising machines with optical error correction circuits. Adv. Quant. Technol. 4, 2100077 (2021)
Inagaki, T., et al.: Large-scale Ising spin network based on degenerate optical parametric oscillators. Nat. Photonics 10, 415–419 (2016)
Haribara, Y., Utsunomiya, S., Yamamoto, Y.: Computational principle and performance evaluation of coherent Ising machine based on degenerate optical parametric oscillator network. Entropy 18, 151 (2016)
Böhm, F., Alonso-Urquijo, D., Verschaffelt, G., Van der Sande, G.: Noise-injected analog Ising machines enable ultrafast statistical sampling and machine learning. Nat. Commun. 13, 5847 (2022). https://doi.org/10.1038/s41467-022-33441-3
Shi, P., Yuan, D., Han, D., Zhang, Y., Fu, R.: Stochastic resonance in a time-delayed feedback tristable system and its application in fault diagnosis. J. Sound Vib. 424, 1–14 (2018)
Benedetti, M., Realpe-Gómez, J., Biswas, R., Perdomo-Ortiz, A.: Estimation of effective temperatures in quantum annealers for sampling applications: A case study with possible applications in deep learning. Phys. Rev. A 94, 022308 (2016)
Liao, Z. et al.: Quantum analog annealing of gain-dissipative Ising machine driven by colored gaussian noise. Adv. Theory Simul. 2100497 (2022).
Landau, D., Tang, S., Wansleben, S.: Monte-Carlo studies of dynamical critial phenomena. J. de Physique Colloques 49, 1525–1529 (1988). https://doi.org/10.1051/jphyscol:19888701
Commander, C. W.: Maximum Cut Problem, MAX-CUT. In: Floudas, C., Pardalos, P. (eds) Encyclopedia of Optimization. Springer, Boston, MA (2008).
Davis, T.A., Hu, Y.: The university of Florida sparse matrix collection. ACM Trans. Math. Softw. 38, 1–25 (2011)
Ma, F., Hao, J.-K.: A multiple search operator heuristic for the max-k-cut problem. Ann. Oper. Res. 248, 365–403 (2017)
Li, L., Liu, H., Huang, N., Wang, Z.: Accuracy-enhanced coherent Ising machine using the quantum adiabatic theorem. Opt. Express 29, 18530–18539 (2021)
Shi, Z., Liao, Z., Tabata, H.: Boosting learning ability of overdamped bistable stochastic resonance system based physical reservoir computing model by time-delayed feedback. Chaos, Solitons Fractals 161, 112314 (2022)
Wang, Z., Yang, J., Guo, Y., Gong, T. & Shan, Z.: Positive role of bifurcation on stochastic resonance and its application in fault diagnosis under time-varying rotational speed. J. Sound Vib. 117210 (2022).
Zhang, W., Shi, P., Li, M., Han, D.: A novel stochastic resonance model based on bistable stochastic pooling network and its application. Chaos, Solitons Fractals 145, 110800 (2021)
Sarker, M.S., et al.: Reconfigurable magnon interference by on-chip dynamic wavelength conversion. Sci. Rep. 13, 4872 (2023). https://doi.org/10.1038/s41598-023-31607-7
Inui, Y., Gunathilaka, M.D.S.H., Kako, S., Aonishi, T., Yamamoto, Y.: Control of amplitude homogeneity in coherent Ising machines with artificial Zeeman terms. Commun. Phys. 5, 1–7 (2022)
Liao, Z., et al.: Phase locking of ultra-low power consumption stochastic magnetic bits induced by colored noise. Chaos, Solitons Fractals 151, 111262 (2021)
Yu, D., Wang, G., Ding, Q., Li, T., Jia, Y.: Effects of bounded noise and time delay on signal transmission in excitable neural networks. Chaos, Solitons Fractals 157, 111929 (2022). https://doi.org/10.1016/j.chaos.2022.111929
Wang, X., Feng, J., Liu, Q., Li, Y., Xu, Y.: Neural network-based parameter estimation of stochastic differential equations driven by Lévy noise. Physica A 606, 128146 (2022)
Acknowledgements
Zhiqiang Liao would like to acknowledge the support provided by the Quantum Science and Technology Fellowship Program of the University of Tokyo. This research was supported by the Basic Research Grant (Hybrid AI) of the Institute for AI and Beyond of the University of Tokyo, JST-CREST (JPMJCR22O2), Japan AMED (JP22zf0127006) and JSPS KAKENHI [Grant Number JP20H05651, 22K18804, 23H04099, and 23KJ0605].
Funding
Open Access funding provided by The University of Tokyo. Fund was provided by the Basic Research Grant (Hybrid AI) of the Institute for AI and Beyond of the University of Tokyo, JST-CREST (JPMJCR22O2), Japan AMED (JP22zf0127006) and JSPS KAKENHI [Grant Number JP20H05651, 22K18804, 23H04099, and 23KJ0605].
Author information
Authors and Affiliations
Contributions
Z.L. designed the study, performed the simulation, and wrote the manuscript. Z.L. and K.M. conducted the data analyzing and data visualization. All authors discussed the results and made contribution to revising the manuscript. H.Y. and H.T. supervised the research.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Liao, Z., Ma, K., Sarker, M.S. et al. Overdamped Ising machine with stochastic resonance phenomena in large noise condition. Nonlinear Dyn 112, 8967–8984 (2024). https://doi.org/10.1007/s11071-024-09486-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09486-y