
Abstract
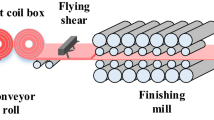
This paper proposes an outlier-resistant non-fragile (ORNF) observer-based boundary control strategy for the hot strip mill (HSM) cooling process. First, measurement outliers and observer parameter perturbations are unavoidable due to the disturbances or faults of the HSM cooling process, so the ORNF observer is developed using the saturation function and the non-fragile control theory to improve the observation accuracy. Then, a sampled-data (SD) measurement is utilized, which avoids frequent updating of temperature sensors. Furthermore, a SD boundary control strategy is proposed by using the above observed temperature information, which only requires an actuator to be installed on one side of the system to regulate the temperature, reducing the control cost of the HSM cooling process effectively. Finally, sufficient conditions to ensure the stability of the HSM cooling process are derived through rigorous mathematical proof, and simulation results are presented to verify the effectiveness and superiority of the proposed method.









Similar content being viewed by others

Data availability
The authors declare that the manuscript has no associated data.
References
Peng, K.X., Zhang, K., Li, G., Zhou, D.H.: Contribution rate plot for nonlinear quality-related fault diagnosis with application to the hot strip mill process. Control Eng. Pract. 21(4), 360–369 (2013)
Wang, H.W., Jing, Y.W., Yu, C.: Guaranteed cost sliding mode control for looper-tension multivariable uncertain systems. Nonlinear Dyn. 80, 39–50 (2015)
Li, T.F., Chang, X.H.: Fuzzy output regulation of nonlinear time-delay distributed parameter systems with quantization and actuator failures: application to hot strip mill cooling process. IEEE Trans. Ind. Inform. 19(4), 6246–6257 (2023)
Ma, L., Dong, J., Peng, K.X., Zhang, K.: A novel data-based quality-related fault diagnosis scheme for fault detection and root cause diagnosis with application to hot strip mill process. Control Eng. Pract. 67, 43–51 (2017)
Luo, H., Li, K., Kaynak, O., Yin, S., Huo, M.Y., Zhao, H.: A robust data-driven fault detection approach for rolling mills with unknown roll eccentricity. IEEE Trans. Control Syst. Technol. 28(6), 2641–2648 (2020)
Wang, J.W., Zhang, J.F., Wu, H.N.: Boundary fuzzy output tracking control of nonlinear parabolic infinite-dimensional dynamic systems: application to cooling process in hot strip mills. IEEE Trans. Fuzzy Syst. 31(5), 1460–1473 (2023)
Cui, R.Z., Wei, Y.H., Chen, Y.Q., Cheng, S.S., Wang, Y.: An innovative parameter estimation for fractional-order systems in the presence of outliers. Nonlinear Dyn. 89, 453–463 (2017)
Fang, F., Liu, Y.M., Park, J.H., Liu, Y.J.: Outlier-resistant non-fragile control of T-S fuzzy neural networks with reaction-diffusion terms and its application in image secure communication. IEEE Trans. Fuzzy Syst. 31(9), 2929–2942 (2023)
Qu, B.G., Wang, Z.D., Shen, B., Dong, H.L.: Outlier-resistant recursive state estimation for renewable-electricity-generation-based microgrids. IEEE Trans. Ind. Inform. 19(5), 7133–7144 (2023)
Zhang, S.J., He, J.W., Yang, Y., Yan, T.L.: An outlier-resistant approach to observer-based security control for interval type-2 T-S fuzzy systems subject to deception attacks. IET Control Theory Appl. 17(1), 39–52 (2023)
Geng, H., Wang, Z.D., Mousavi, A., Alsaadi, F.E., Cheng, Y.H.: Outlier-resistant filtering with dead-zone-like censoring under try-once-discard protocol. IEEE Trans. Signal Process. 70, 714–728 (2022)
Shen, Y.X., Wang, Z.D., Shen, B., Dong, H.L.: Outlier-resistant recursive filtering for multisensor multirate networked systems under weighted try-once-discard protocol. IEEE Trans. Cybern. 51(10), 4897–4908 (2021)
Yang, Y., He, Y.: Non-fragile observer-based robust control for uncertain systems via aperiodically intermittent control. Inf. Sci. 573, 239–261 (2021)
Boroujeni, E.A., Momeni, H.R.: An iterative method to design optimal non-fragile \(H_\infty \) observer for Lipschitz nonlinear fractional-order systems. Nonlinear Dyn. 80(4), 1801–1810 (2015)
Wang, J.W., Yang, Y.: Parameter-dependent observer-based feedback compensator design of a space-time-varying PDE with application to a class of steelmaking processes. Int. J. Robust Nonlinear Control 31(16), 7640–7656 (2021)
He, W., He, X.Y., Zou, M.F., Li, H.Y.: PDE model-based boundary control design for a flexible robotic manipulator with input backlash. IEEE Trans. Control Syst. Technol. 27(2), 790–797 (2019)
Wei, C.Z., Li, J.M.: Finite-time non-fragile boundary feedback control for a class of nonlinear parabolic systems. Nonlinear Dyn. 103, 2753–2768 (2021)
Wang, J., Krstic, M.: Output feedback boundary control of a heat PDE sandwiched between two ODEs. IEEE Trans. Autom. Control 64(11), 4653–4660 (2019)
Zhao, Z.J., Liu, Y., Luo, F.: Output feedback boundary control of an axially moving system with input saturation constraint. ISA Trans. 68, 22–32 (2017)
Koga, S., Karafyllis, I., Krstic, M.: Towards implementation of PDE control for Stefan system: input-to-state stability and sampled-data design. Automatica 127, 109538 (2021)
Katz, R., Fridman, E.: Sampled-data finite-dimensional boundary control of 1D parabolic PDEs under point measurement via a novel ISS Halanay’s inequality. Automatica 135, 109966 (2022)
Wang, X.Y., Tang, Y., Fiter, C., Hetel, L.: Sampled-data distributed control for homo-directional linear hyperbolic system with spatially sampled state measurements. Automatica 139, 110183 (2022)
Mao, J., Zou, W..C., He, W..M., Xiang, Z..R.: Practical finite-time sampled-data output feedback stabilization for a class of upper-triangular nonlinear systems with input delay. IEEE Trans. Syst. Man Cybern. Syst 53(6), 3428–3439 (2023)
Tamil Thendral, M., Ganesh Babu, T.R., Chandrasekar, A., Cao, Y.: Synchronization of Markovian jump neural networks for sampled data control systems with additive delay components: analysis of image encryption technique. Math. Methods Appl. Sci. (2022). https://doi.org/10.1002/mma.8774
Han, X.X., Wu, K.N., Yao, Y.: Asynchronous boundary stabilization for T-S fuzzy Markov jump delay reaction-diffusion neural networks. J. Franklin Inst. 359(7), 2833–2856 (2022)
Wang, Z.P., Zhang, X., Wu, H.N., Huang, T.W.: Fuzzy boundary control for nonlinear delayed DPSs under boundary measurements. IEEE Trans. Cybern. 53(3), 1547–1556 (2023)
Wang, F.J., Song, Y., Liu, C., He, A.R., Qiang, Y.: Multi-objective optimal scheduling of laminar cooling water supply system for hot rolling mills driven by digital twin for energy-saving. J. Process Control 122, 134–146 (2023)
Benabdelhadi, A., Giri, F., Ahmed-Ali, T., Krstic, M., Fadil, H.E., Chaoui, F.-Z.: Adaptive observer design for wave PDEs with nonlinear dynamics and parameter uncertainty. Automatica 123, 109295 (2021)
Holta, H., Aamo, O.M.: Observer design for a class of semilinear hyperbolic PDEs with distributed sensing and parametric uncertainties. IEEE Trans. Autom. Control 67(1), 134–145 (2022)
Ghaderi, N.: A novel observer-based approach for the exponential stabilization of the string PDE with cubic nonlinearities. Syst. Control Lett. 165, 105273 (2022)
Chandrasekar, A., Radhika, T., Zhu, Q.X.: State estimation for genetic regulatory networks with two delay components by using second-order reciprocally convex approach. Neural Process. Lett. 54, 327–345 (2022)
Wang, J., Krstic, M.: Event-triggered output-feedback backstepping control of sandwich hyperbolic PDE systems. IEEE Trans. Autom. Control 67(1), 220–235 (2022)
Song, X.N., Wang, M., Ahn, C.K., Song, S.: Finite-time fuzzy bounded control for semilinear PDE systems with quantized measurements and Markov jump actuator failures. IEEE Trans. Cybern. 52(7), 5732–5743 (2022)
Song, X.N., Zhang, Q.Y., Song, S., Ahn, C.K.: Improved event-triggered control for a chemical tubular reactor with singular perturbations. J. Process Control 112, 49–56 (2022)
Zhao, Z.J., Liu, Z.J., He, W., Hong, K.-S., Li, H.X.: Boundary adaptive fault-tolerant control for a flexible Timoshenko arm with backlash-like hysteresis. Automatica 130, 109690 (2021)
Cao, Y., Chandrasekar, A., Radhika, T., Vijayakumar, V.: Input-to-state stability of stochastic Markovian jump genetic regulatory networks. Math. Comput. Simul. (2023). https://doi.org/10.1016/j.matcom.2023.08.007
Chandrasekar, A., Radhika, T., Zhu, Q.X.: Further results on input-to-state stability of stochastic Cohen–Grossberg BAM neural networks with probabilistic time-varying delays. Neural Process. Lett. 54, 613–635 (2022)
Radhika, T., Chandrasekar, A., Vijayakumar, V., Zhu, Q.X.: Analysis of Markovian jump stochastic Cohen–Grossberg BAM neural networks with time delays for exponential input-to-state stability. Neural Process. Lett. 55, 11055–11072 (2023)
Song, X..N., Wang, M., Song, S., Ahn, C..K.: Intermittent state observer design for neural networks with reaction–diffusion terms using partial measurements. IEEE Trans. Syst. Man Cybern. Syst 53(8), 5224–5235 (2023)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China under Grants 62203153 and 61976081, in part by the Natural Science Fund for Excellent Young Scholars of Henan Province under Grant 202300410127, in part by Key Scientific Research Projects of Higher Education Institutions in Henan Province under Grant 22A413001, in part by Top Young Talents in Central Plains under Grant Yuzutong (2021) 44, in part by Technology Innovative Teams in University of Henan Province under Grant 23IRTSTHN012, and in part by the Natural Science Fund for Young Scholars of Henan Province under Grant 222300420151.
Funding
This work was supported in part by the National Natural Science Foundation of China under Grants 62203153 and 61976081, in part by the Natural Science Fund for Excellent Young Scholars of Henan Province under Grant 202300410127, in part by Key Scientific Research Projects of Higher Education Institutions in Henan Province under Grant 22A413001, in part by Top Young Talents in Central Plains under Grant Yuzutong (2021) 44, in part by Technology Innovative Teams in University of Henan Province under Grant 23IRTSTHN012, and in part by the Natural Science Fund for Young Scholars of Henan Province under Grant 222300420151.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Proof of Theorem 1
The following Lyapunov function is constructed:
Then, along the (16) and (18), the derivative is calculated for (33) with respect to time as
Next, substituting (16) and (18) into (34) yields
and
where using integral by parts and boundary condition (19), then \(\int _{0}^{l} 2p\alpha e(x,t)e_{xx}(x,t)dx\) in (35) is further deduced as
Similarly, combining integral by parts and boundary condition (17), \(\int _{0}^{l} 2p\alpha s(x,t)s_{xx}(x,t)dx\) in (36) is reexpressed as
Employing Lemma 1 in [33], \(- 2\int _{0}^{l} p\alpha e_x^2(x,t) dx\) in (37) and \(- 2\int _{0}^{l} p\alpha s_x^2(x,t) dx\) in (38) are estimated as:
and
Define \(\omega (l,t)=s(l,t) - s(l,t_k)\) and \(m(l,t) = e(l,t) - e(l,t_k)\), which means that
and
from which it is straightforward to obtain that the following equation holds:
and
where \(q_{\varrho }\ (\varrho =1,2,3,4)\) are arbitrary positive constants.
Then, according to Lemma 1, it is direct to obtain
and
Therefore, based on (34)–(46), the following formula can be derived:
where \(\omega ^2(l,t) \le c_1,m^2(l,t) \le c_2\) with given positive parameters \(c_1\) and \(c_2\) and \(\rho >0\) is a given constant.
Defining \(\zeta {=}col[e(x,t),e(l,t),\vartheta (e(l,t_k)),s(x,t),s(l,t), s(l,t_k),\omega (l,t),e(l,t_k),m(l,t)]\), one gets
where \(\varPsi =\varOmega -\varXi <0\),
and
with
Next, defining \(\varPhi _i=col[pD_i,0,0,0,0,0,0,0,0]\) and \(\varTheta _i = [0,0,F_i,0,0,0,0,{\tilde{\upsilon }} F_i,0]\), then we can obtain \(\varXi =\varPhi \varLambda (t)\varTheta +*\), where \(\varLambda _i^T(t)\varLambda _i(t) \le I\).
Therefore, one has
Inspired by [8], the following equation is valid:
Then, \(\varPsi = \varOmega - \varXi \) can be further derived as
which, by utilizing the Schur Complement Lemma, is reformulated as (21), i.e., \(\varUpsilon <0\).
Since \(\varUpsilon <0\), based on (47), we can get
Defining \(c=\gamma _1c_1+\gamma _2c_2\), it can be deduced that
Therefore, according to Definition 1 in [37, 38], we complete the proof. \(\blacksquare \)
Proof of Theorem 3
Similar to the process of (33)–(40), one can directly get
Defining \(\zeta = col[e(x,t),e(l,t),\vartheta (e(l,t)),s(x,t),s(l,t)]\), one has
where \(\varPsi '=\varOmega '-\varXi '<0\),
\(\varXi '=\varPhi '_i\varLambda _i(t)\varTheta ' _i+* \), \(\varPhi '_i = col[pD_i,0,0,0,0]\), and \(\varTheta ' _i = [0,{\tilde{\upsilon }} F_i,F_i,0,0]\).
Next, similar to the steps of (48)–(51), it can be deduced that (29) holds, which completes the proof. \(\blacksquare \)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Song, X., Peng, Z., Song, S. et al. Outlier-resistant observer-based fuzzy sampled-data boundary control for the hot strip mill cooling process. Nonlinear Dyn 112, 7057–7072 (2024). https://doi.org/10.1007/s11071-024-09404-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09404-2