
Abstract
This paper explores the complicated dynamic behavior of a mechanical oscillator under harmonic angular excitation. The motivation behind this work comes from the nature of the actuation produced by high-performance dither motors. A lumped-mass model, which captures the primary and the 1 : 2 superharmonic resonances observed on an analogous experimental test setup, is put forward. The equations of motion governing the dynamics of the model are derived and are found to comprise both parametric and direct forcing terms. The governing equations are solved analytically using the generalized harmonic balance method and numerical integration. The method of multiple scales is utilized to obtain closed-form expressions that relate the system parameters to the oscillation amplitudes in the vicinity of the direct and the 1 : 2 superharmonic resonances. It is found that eccentricity plays a vital role in the occurrence of the resonances. Besides, the relationship between the excitation amplitudes and the resulting oscillations for the direct and the superharmonic resonances are dissimilar. A few salient differences between classical (rectilinear) and angular base excitation mechanisms are pointed out.














Similar content being viewed by others

Data availability
The authors confirm that the data supporting the findings of this study are available within the article.
Notes
\(\omega =1480.3\) rad/s, length \(l_0=0.0000135\) m, \(\zeta =0.00085\). Non-dimensional parameters \(x_e=2\) and \(y_e=12.5\). Details of parameter estimation are provided in Appendix B.
References
Nayfeh, A.H., Mook, D.T.: Nonlinear oscillations. Wiley, New York (2008)
Burns, J.A.: More on pumping a swing. Am. J. Phys. 38(7), 920–922 (1970)
Ruby, L.: Applications of the mathieu equation. Am. J. Phys. 64(1), 39–44 (1996)
Turner, K.L., Miller, S.A., Hartwell, P.G., MacDonald, N.C., Strogatz, S.H., Adams, S.G.: Five parametric resonances in a microelectromechanical system. Nature 396(6707), 149–152 (1998)
Lee, D., Moon, G., Lee, J.: Mechanical dither design for ring laser gyroscope. J. Mech. Sci. Technol. 16(4), 485–491 (2002)
Yu, X., Wei, G., Long, X., Tang, J.: Finite element analysis and optimization of dither mechanism in dithered ring laser gyroscope. Int. J. Precis. Eng. Manuf. 14(3), 415–421 (2013)
Yu, X., Long, X.: Parametric design of mechanical dither with bimorph piezoelectric actuator for ring laser gyroscope. Int. J. Appl. Electromagnet Mech 47(2), 305–312 (2015)
Lazarus, A., Prabel, B., Combescure, D.: A 3d finite element model for the vibration analysis of asymmetric rotating machines. J. Sound Vib. 329(18), 3780–3797 (2010)
Bucher, I., Shomer, O.: Asymmetry identification in rigid rotating bodies-theory and experiment. Mech. Syst. Signal Process. 41(1–2), 502–509 (2013)
Anilkumar, A., Kartik, V.: In-plane vibration of a rigid body attached to a flexible rotating beam. J. Sound Vib. 475, 115245 (2020)
Sawicki, J. T., Kulesza, Z.: Stability of a cracked rotor subjected to parametric excitation. J. Eng. Gas Turbines Power 137(5), 052508 (2015)
Ganesan, S., Padmanabhan, C.: Modelling of parametric excitation of a flexible coupling-rotor system due to misalignment. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 225(12), 2907–2918 (2011)
Childs, D.W.: Rub-induced parametric excitation in rotors. J. Mech. Des. 101(4), 640–644 (1979)
Song, Z., Chen, Z., Li, W., Chai, Y.: Parametric instability analysis of a rotating shaft subjected to a periodic axial force by using discrete singular convolution method. Meccanica 52(4), 1159–1173 (2017)
Qaderi, M., Hosseini, S., Zamanian, M.: Combination parametric resonance of nonlinear unbalanced rotating shafts. J. Comput. Nonlinear Dyn. 13(11), 111002 (2018)
Sheu, H., Chen, L.: A lumped mass model for parametric instability analysis of cantilever shaft-disk systems. J. Sound Vib. 234(2), 331–348 (2000)
Yang, F., Pei, Y.: Dynamics and phase-based vibration suppression of rotating flexible shaft with unstressed initial deformation under several parametric excitations. J. Sound Vib. 509, 116248 (2021)
Bulatović, Ž, Štavljanin, M., Tomić, M., Knežević, D., Biočanin, S.L.: Measurement and analysis of angular velocity variations of twelve-cylinder diesel engine crankshaft. Mech. Syst. Signal Process. 25(8), 3043–3061 (2011)
Turhan, Ö., Bulut, G.: Dynamic stability of rotating blades (beams) eccentrically clamped to a shaft with fluctuating speed. J. Sound Vib. 280(3–5), 945–964 (2005)
Georgiades, F.: Nonlinear dynamics of a spinning shaft with non-constant rotating speed. Nonlinear Dyn. 93(1), 89–118 (2018)
Natsiavas, S.: On the dynamics of rings rotating with variable spin speed. Nonlinear Dyn. 7(3), 345–363 (1995)
Asokanthan, S.F., Cho, J.: Dynamic stability of ring-based angular rate sensors. J. Sound Vib. 295(3–5), 571–583 (2006)
Asokanthan, S. F., Arghavan, S., Bognash, M.: Stability of ring-type mems gyroscopes subjected to stochastic angular speed fluctuation. J. Vib. Acoust. 139(4), 040904 (2017)
Mendes, A., Meirelles, P., Zampieri, D.: Analysis of torsional vibration in internal combustion engines: modelling and experimental validation. Proc. Inst. Mech. Eng. Part K J. Multi-body Dyn. 222(2), 155–178 (2008)
Liu, S., Li, Y., He, M., Wang, B., Liu, B.: Bifurcation and stability study in coupling nonlinear rotating machinery’s system under the influence of time-varying stiffness, in: Proceedings of the 10th World Congress on Intelligent Control and Automation, IEEE, pp. 1263–1268 (2012)
Fourati, A., Bourdon, A., Feki, N., Rémond, D., Chaari, F., Haddar, M.: Angular-based modeling of induction motors for monitoring. J. Sound Vib. 395, 371–392 (2017)
Filipi, Z.S., Assanis, D.N.: A nonlinear, transient, single-cylinder diesel engine simulation for predictions of instantaneous engine speed and torque. J. Eng. Gas Turbines Power 123(4), 951–959 (2001)
Falcone, P., De Gennaro, M. C., Fiengo, G., Glielmo, L., Santini, S., Langthaler, P.: Torque generation model for diesel engine, in: 42nd IEEE International Conference on Decision and Control (IEEE Cat. No. 03CH37475), Vol. 2, IEEE, pp. 1771–1776 (2003)
Hwang, S., Perkins, N., Ulsoy, A., Meckstroth, R.: Rotational response and slip prediction of serpentine belt drive systems, in: International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Vol. 11788, American Society of Mechanical Engineers, pp. 61–71 (1993)
Ramakrishnan, V., Feeny, B. F.: Resonances of a forced mathieu equation with reference to wind turbine blades, J. Vib. Acoust. 134(6), 064501 (2012)
HaQuang, N., Mook, D.T., Plaut, R.H.: Non-linear structural vibrations under combined parametric and external excitations. J. Sound Vib. 118(2), 291–306 (1987)
Plaut, R.H., Gentry, J.J., Mook, D.T.: Non-linear structural vibrations under combined multi-frequency parametric and external excitations. J. Sound Vib. 140(3), 381–390 (1990)
Yagasaki, K., Sakata, M., Kimura, K.: Dynamics of a weakly nonlinear system subjected to combined parametric and external excitation. ASME J. Appl. Mech. 57(1), 209–217 (1990)
El-Bassiouny, A., Kamel, M., Abdel-Khalik, A.: Two-to-one internal resonances in nonlinear two degree of freedom system with parametric and external excitations. Math. Comput. Simul. 63(1), 45–56 (2003)
Chiba, M., Shimazaki, N., Ichinohe, K.: Dynamic stability of a slender beam under horizontal-vertical excitations. J. Sound Vib. 333(5), 1442–1472 (2014)
Bauomy, H.S., El-Sayed, A.T.: Control of a two-degree-of-freedom system with combined excitations. Arch. Civil Mech. Eng. 15(2), 492–508 (2015)
Praveen Krishna, I., Padmanabhan, C.: Improved reduced order solution techniques for nonlinear systems with localized nonlinearities. Nonlinear Dyn. 63(4), 561–586 (2011)
Balaji, N.N., Praveen Krishna, I., Padmanabhan, C.: A multi-harmonic generalized energy balance method for studying autonomous oscillations of nonlinear conservative systems. J. Sound Vib. 422, 526–541 (2018)
Anilkumar, A., Kartik, V.: Eigen and temporal characteristics of multi-frequency parametrically-excited rotor-oscillator systems. J. Sound Vib. 493, 115824 (2021)
Anilkumar, A., Kartik, V.: Stability characteristics of multi-frequency parametrically-excited rotor-oscillator systems. J. Sound Vib. 497, 115939 (2021)
Acknowledgements
The authors thank Prof. Kurien Isaac K. (IIST) and Shri. Manoj Augustine Cherian (IISU, ISRO) for sharing their knowledge during this research, and Shri. Ullas Jose (IISU, ISRO) for assistance with the literature survey.
Funding
No funding was received for conducting this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Derivation of the equations of motion
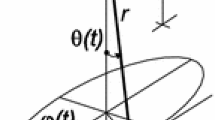
The equations of motion (EoM) governing the system of Fig. 1 are derived as follows. The position vector \(\vec {P}\) of mass m is
where \({\hat{i}}\) and \({\hat{j}}\) are unit vectors along the axes marked X and Y. The time derivative,
where \(\left( \bullet \right) '\) denotes differentiation with respect to time t. The derivatives of the unit vector are \({{\hat{i}}}'=\Omega \vec {k} \times \vec {i}=\Omega \vec {j}\) and \({{\hat{j}}}'=\Omega \vec {k} \times \vec {j}=-\Omega \vec {i}\). Using these relations, Eq. (57) can be expressed as
The quantity \(\left( {\vec {P}}'\right) ^2\) is
The kinetic energy of the mass m is \(T=\frac{1}{2}m {\vec {P}'}\,^2\), and the potential energy stored in the springs is \(V=\frac{1}{2}k_x x^2+\frac{1}{2}k_y y^2\). This form of potential energy strictly models a linear spring which describes the motion of a small magnitude about the mean position. Note that large amplitude oscillations, where geometric nonlinearities can be significant, are not of interest in this work. The Lagrangian \(L=T-V\) of the system is developed, and the damping terms are included in the formulation by employing the Rayleigh dissipation function.
Following the Euler-Lagrange equations,
where \(q_1=x\) and \(q_2=y\), the EoM are derived as
and
This work explores the effect of angular base excitation, and therefore it is assumed that \(\Omega ={\overline{\Omega }}\sin \lambda t\). The following equations can be obtained by substituting this function in Eqs. (62) and (63).
Using the variables, \(x^*=\frac{x}{l_0}\), \(y^*=\frac{y}{l_0}\), \(t^*=\frac{t}{t_0}=\omega t\), and parameters \(x_e^*=\frac{x_e}{l_0}\), \(y_e^*=\frac{y_e}{l_0}\), \(\omega =\sqrt{\frac{k_x}{m}}\), \(\omega _{yx}=\sqrt{\frac{k_y}{k_x}}\), \(\zeta ^*=\frac{c}{2m\omega }\), \(\Omega ^*=\frac{{\overline{\Omega }}}{\omega }\), \(\lambda ^*=\frac{\lambda }{\omega }\), Eqs.(64) and (65) can be expressed as
where \(\dot{\left( \bullet \right) }\) denotes the differentiation with respect to non-dimensional time, \(t^*\). The equations of motion (Eqs. 1) and (2) are obtained by omitting the ‘\(*\)’ superscripts for brevity, and expressing the \(\sin ^2 \lambda t\) in terms of \(\cos 2\lambda t\).
Appendix B: Parameter estimation
Parameters are estimated from the experimental setup as described below.
-
1.
Natural frequency, \(\omega \): The cylindrical specimen is displaced slightly from its rest position. \(\omega \) is estimated experimentally from the fast Fourier transform of the response to such an initial configuration. The response obtained resembles that of Fig. 3.
-
2.
Damping coefficient, \(\zeta \): The ratio of the amplitudes of decaying oscillations are used to estimate \(\zeta \). Once the amplitudes \(x_0\) and \(x_n\) of the initial and the \(n^{th}\) vibration amplitudes are obtained from a decaying response such as that of Fig. 3, \(\zeta \approxeq \frac{\delta }{2\pi }\) where \(\delta =\frac{1}{n}ln\frac{x_0}{x_n}\).
-
3.
Eccentricities, \(x_e\) and \(y_e\): These are measured using a Vernier caliper.
Appendix C: Equivalence between measurements made from the fixed and the oscillating frames.
Measurements made are from the fixed (laboratory) FoR. Therefore, a coordinate transformation from the oscillating FoR to the fixed FoR is required to interpret the results. Figure 15 depicts two FoRs, a fixed frame \(X_F Q Y_F\) and a rotating frame \(X_R Q Y_R\). The vibrometer measures the displacement \(y_f\) of the flexible cylinder from the fixed FoR. The displacement \(y_f\) can be expressed as

Schematic depicting the transformation from a rotating to a stationary frame of reference
If the angular displacement \(\theta \) is small, \(y_f\approxeq \left( x_r\theta +y_r\right) \approxeq y_r\). This means that for small values of \(\theta \), the observations (\(x_f\) and \(y_f\)) made from the fixed FoR and those made from the moving FoR (\(x_r\) and \(y_r\)) are identical. For the experiments, the results presented here, \(\theta \), are of the order of \(1e-5\) radians, while the orders of magnitude of \(x_r\) and \(y_r\) are comparable.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Anilkumar, A., Krishna, I.R.P., Sharma, N.G. et al. Experimental and theoretical investigation of superharmonic resonances in a planar oscillator under angular base excitation. Nonlinear Dyn 111, 9059–9074 (2023). https://doi.org/10.1007/s11071-023-08336-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08336-7