
Abstract
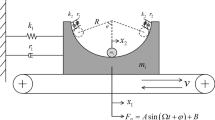
Based on the high-dimensional flow switchability theory in discontinuous dynamical systems, this paper aims at investigating the dynamical behaviors of a 3-DOF (three degree-of-freedom) oblique-impact system with dry friction and single pendulum device. The oblique impact system considered in this paper consists of elastic contact model and Coulomb friction model; meanwhile, the unequal kinetic and static friction coefficients result in the flow barriers. Firstly, according to two factors that cause discontinuity, namely friction and impact, different regions, boundaries and edges are delineated in four- and two-dimensional phase spaces. Secondly, the conditions of motion transformation at separation boundaries are developed. Thirdly, the switching criteria of motion at the edges in four-dimensional phase space are deduced, which is a further extension and enrichment of flow switching theory in higher-dimensional space. Finally, some typical motions are visually demonstrated by numerical simulations, and the sliding bifurcation scenarios are presented. Compared with low-dimensional flow switchability theory, this method can more systematically study the dynamic behaviors of multiple degree-of-freedom system under the simultaneous action of multiple objects and give more convenient analytical conditions. The study on the complex motion mechanism of such a 3-DOF oblique-impact system provides a reference for the parameter selection of single pendulum shock absorbers, which is useful in exploring how to suppress the vibration/noise of friction/impact system in mechanical engineering field.















Similar content being viewed by others
Data availibility
All data generated or analyzed during this study are included in this article.
References
Filippov, A.F.: Differential Equations with Discontinuous Righthand Sides. Kluwer Academic Publishers, Dordrecht (1988)
Pierre, C., Ferri, A., Dowell, E.: Multi-harmonic analysis of dry friction damped systems using an incremental harmonic balance method. J. Appl. Mech. 52(4), 958–964 (1985)
Swevers, J., Al-Bender, F., Ganseman, C., Prajogo, T.: An integrated friction model structure with improved presliding behavior for accurate friction compensation. IEEE Trans. Autom. Control 45(4), 675–686 (2000)
Berger, E.: Friction modeling for dynamic system simulation. Appl. Mech. Rev. 55(6), 535–577 (2002)
Marques, F., Flores, P., Claro, J., Lankarani, H.: A survey and comparison of several friction force models for dynamic analysis of multibody mechanical systems. Nonlinear Dyn. 86(3), 1407–1443 (2016)
Muvengei, O., Kihiu, J., Ikua, B.: Dynamic analysis of planar multi-body systems with LuGre friction at differently located revolute clearance joints. Multibody Syst. Dyn. 28(4), 369–393 (2012)
Tan, X., Chen, G., Sun, D., Chen, Y.: Dynamic analysis of planar mechanical systems with clearance joint based on LuGre friction model. J. Comput. Nonlinear Dyn. 13(6), 061003 (2018)
Hoffmann, N., Fischer, M., Allgaier, R., Gaul, L.: A minimal model for studying properties of the mode-coupling type instability in friction induced oscillations. Mech. Res. Commun. 29(4), 197–205 (2002)
Hoffmann, N., Gaul, L.: Effects of damping on mode-coupling instability in friction induced oscillations. ZAMM Z Angew. Math. Mech. 83(8), 524–534 (2003)
Sinou, J., Jézéquel, L.: Mode coupling instability in friction-induced vibrations and its dependency on system parameters including damping. Eur. J. Mech. A Solid 26(1), 106–122 (2007)
Ghorbel, A., Zghal, B., Abdennadher, M., Walha, L., Haddar, M.: Investigation of friction-induced vibration in a disk brake model, including mode-coupling and gyroscopic mechanisms. Proc. Inst. Mech. Eng. D J. Autom. 234(2–3), 095440701984572 (2019)
Charroyer, L., Chiello, O., Sinou, J.-J.: Parametric study of the mode coupling instability for a simple system with planar or rectilinear friction. J. Sound Vib. 384(8), 94–112 (2016)
Awrejcewicz, J., Dzyubak, L., Grebogi, C.: Estimation of chaotic and regular (stick-slip and slip-slip) oscillations exhibited by coupled oscillators with dry friction. Nonlinear Dyn. 42(2), 383–394 (2005)
Awrejcewicz, J., Sendkowski, D.: Stick-slip chaos detection in coupled oscillators with friction. Int. J. Solids Struct. 42(21–22), 5669–5682 (2005)
Hetzler, H., Schwarzer, D., Seemann, W.: Analytical investigation of steady-state stability and Hopf-bifurcations occurring in sliding friction oscillators with application to low-frequency disc brake noise. Commun. Nonlinear Sci. Numer. Simul. 12(1), 83–99 (2007)
Saha, A., Wahi, P.: An analytical study of time-delayed control of friction-induced vibrations in a system with a dynamic friction model. Int. J. Nonlinear Mech. 63, 60–70 (2014)
Martinez, R., Alvarez, J.: A controller for 2-DOF underactuated mechanical systems with discontinuous friction. Nonlinear Dyn. 53(3), 191–200 (2008)
Masri, S., Caughey, T.: On the stability of the impact damper. J. Appl. Mech. 33(3), 586–592 (1966)
Masri, S.: Analytical and experimental studies of multiple-unit impact dampers. J. Acoust. Soc. Am. 45(5), 1111 (1969)
Veluswami, M., Crossley, F., Horvay, G.: Multiple impacts of a ball between two plates part 2: mathematical modelling. J. Eng. Ind. 97(3), 828–835 (1975)
Davies, H.: Random vibration of a beam impacting stops. J. Sound Vib. 68(4), 479–487 (1980)
Watanabe, T.: Steady impact vibration of continuous elements. Bull. JSME 24(187), 222–228 (1981)
Kember, S., Babitsky, V.: Excitation of vibro-impact systems by periodic impulses. J. Sound Vib. 227(2), 427–447 (1999)
Ajibose, O., Wiercigroch, M., Pavlovskaia, E., Akisanya, A., Károlyi, G.: Drifting impact oscillator with a new model of the progression phase. J. Appl. Mech. 79(6), 061007 (2012)
Chu, S., Cao, D., Sun, S., Pan, J., Wang, L.: Impact vibration characteristics of a shrouded blade with asymmetric gaps under wake flow excitations. Nonlinear Dyn. 72(3), 539–554 (2013)
Barber, J.: Adhesive contact during the oblique impact of elastic spheres. J. Appl. Math. Phys. 30, 468–476 (1979)
Glocker, C., Studer, C.: Formulation and preparation for numerical evaluation of linear complementarity systems in dynamics. Multibody Syst. Dyn. 13(4), 447–463 (2005)
Moore, D., Shaw, S.: The experimental response of an impacting pendulum system. Int. J. Nonlinear Mech. 25(1), 1–16 (1990)
Lenci, S., Rega, G.: A procedure for reducing the chaotic response region in an impact mechanical system. Nonlinear Dyn. 15(4), 391–409 (1998)
Lenci, S., Rega, G.: Numerical control of impact dynamics of inverted pendulum through optimal feedback strategies. J. Sound Vib. 236(3), 505–527 (2000)
Lenci, S., Rega, G.: Periodic solutions and bifurcations in an impact inverted pendulum under impulsive excitation. Chaos Solitons Fractals 11(15), 2453–2472 (2000)
Lenci, S., Rega, G.: Competing dynamic solutions in a parametrically excited pendulum: attractor robustness and basin integrity. J. Comput. Nonlinear Dyn. 3(4), 041010 (2008)
Lenci, S., Pavlovskaia, E., Rega, G., Wiercigroch, M.: Rotating solutions and stability of parametric pendulum by perturbation method. J. Sound Vib. 310(1–2), 243–259 (2008)
Li, J., Lu, Q., Wang, Q.: Dynamic analysis of two-degree-of-freedom oblique impact system with non-fixed impact positions. Appl. Math. Mech. Eng. 26(7), 882–892 (2005)
Stronge, W.: Energetically consistent calculations for oblique impact in unbalanced systems with friction. J. Appl. Mech. 82(8), 081003 (2015)
Babitsky, V.: Theory of Vibro-Impact Systems and Applications. Springer, New York (1998)
Payr, M., Glocker, C.: Oblique frictional impact of a bar: analysis and comparison of different impact laws. Nonlinear Dyn. 41(4), 361–383 (2005)
Han, W., Hu, H., Jin, D.: Experimental study on dynamics of an oblique-impact vibrating system of two degrees of freedom. Nonlinear Dyn. 50(3), 551–573 (2007)
Cao, D., Gong, X., Wei, D., Chu, S., Wang, L.: Nonlinear vibration characteristics of a flexible blade with friction damping due to tip-rub. Shock Vib. 18(1–2), 105–114 (2011)
Stavroulakis, G.: Recent Advances in Contact Mechanics. Springer, New York (2013)
Hinrichs, N., Oestreich, M., Popp, K.: Dynamics of oscillators with impact and friction. Chaos Solitons Fractals 8(4), 535–558 (1997)
Su, M., Xu, W., Yang, G.: Stochastic response and stability of system with friction and a rigid barrier. Mech. Syst. Signal Process. 132(3), 748–761 (2019)
Ho, J., Nguyen, V., Woo, K.: Nonlinear dynamicsamics of a new electro-vibro-impact system. Nonlinear Dyn. 63(1), 35–49 (2011)
Batako, A., Piiroinen, P.: Friction-driven vibro-impact system for percussive-rotary drilling: a numerical study of the system dynamics. Proc. Inst. Mech. Eng. C J. Mech. 222(10), 1925–1934 (2008)
Santhosh, B., Narayanan, S., Padmanabhan, C.: Nonlinear dynamics of shrouded turbine blade system with impact and friction. Appl. Mech. Mater. 706, 81–92 (2015)
Nguyen, K., La, N., Ho, K., Ngo, Q., Chu, N., Nguyen, V.: The effect of friction on the vibro-impact locomotion system: modeling and dynamic response. Meccanica 56(3), 2121–2137 (2021)
Luo, G., Chu, Y., Zhang, Y., Zhang, J.: Double Neimark–Sacker bifurcation and torus bifurcation of a class of vibratory systems with symmetrical rigid stops. J. Sound Vib. 298, 154–179 (2006)
Luo, G., Zhang, Y., Xie, J.: 1:3 resonance bifurcation of a three-degree-of-freedom vibratory system with symmetrical rigid stops. Phys. Lett. A 372(12), 2026–2031 (2008)
Xu, J., Chen, P., Li, Q.: Theoretical analysis of co-dimension-two grazing bifurcations in n-degree-of-freedom impact oscillator with symmetrical constrains. Nonlinear Dyn. 82, 1641–1657 (2015)
O’Connor, D., Luo, A.: On discontinuous dynamics of a freight train suspension system. Int. J. Bifurc. Chaos 24(12), 1450163 (2014)
Liu, Y., Chávez, J., Pavlovskaia, E., Wiercigroch, M.: Analysis and control of the dynamical response of a higher order drifting oscillator. Proc. R. Soc. A Math. Phys. 474(2210), 20170500 (2018)
Li, H., Xu, X., Ding, X.: Finite-time stability analysis of stochastic switched Boolean networks with impulsive effect. Appl. Math. Comput. 347, 557–565 (2019)
Li, X., Song, S., Wu, J.: Exponential stability of nonlinear systems with delayed impulses and applications. IEEE Trans. Autom. Control 64(10), 4024–4034 (2019)
Li, X., Li, P.: Stability of time-delay systems with impulsive control involving stabilizing delays. Automatica 124, 109336 (2020)
Liu, Y., Zhang, Y., Li, H., Alsaadi, F., Ahmad, B.: Control design for output tracking of delayed Boolean control networks. J. Comput. Appl. Math. 327, 188–195 (2017)
Li, X., Yang, X., Huang, T.: Persistence of delayed cooperative models: impulsive control method. Appl. Math. Comput. 342, 130–146 (2019)
Luo, A.: A theory for non-smooth dynamic systems on the connectable domains. Commun. Nonlinear Sci. Numer. Simul. 10(1), 1–55 (2005)
Luo, A., Gegg, B.: On the mechanism of stick and non-stick, periodic motions in a forced linear oscillator including dry friction. IMECE 13-20 (2004)
Luo, A., Gegg, B.: Stick and non-stick periodic motions in periodically forced oscillators with dry friction. J. Sound Vib. 291(1–2), 132–168 (2006)
Luo, A.: Flow switching bifurcations on the separation boundary in discontinuous dynamical systems with flow barriers. Proc. Inst. Mech. Eng. K J. Multi-Body 221(3), 475–495 (2007)
Luo, A.: A theory for flow switchability in discontinuous dynamical systems. Nonlinear Anal. Hybrid 2(4), 1030–1061 (2008)
Luo, A.: On flow barriers and switchability in discontinuous dynamical systems. Int. J. Bifurc. Chaos 21(1), 1–76 (2011)
Luo, A., Rapp, B.: Sliding and transversal motions on an inclined boundary in a periodically forced discontinuous system. Commun. Nonlinear Sci. Numer. Simul. 15(1), 86–98 (2010)
Guo, Y., Luo, A.: Analytical predication of complex motion of a ball in a periodically shaken horizontal impact pair. J. Comput. Nonlinear Dyn. 7(2), 1–9 (2012)
Fan, J., Gao, M., Chen, S.: Discontinuous dynamic analysis of a class of 2-DOF oscillators with strong nonlinearity under a periodic excitation. IEEE Access 9, 77997–78016 (2021)
Fan, J., Liu, T., Liu, P.: Analysis of discontinuous dynamical behavior of a class of friction oscillators with impact. Int. J. Nonlinear Mech. 106, 38–54 (2018)
Fan, J., Gao, J., Chen, S., Dou, C., Xue, S.: Discontinuous dynamic analysis of a class of three degrees of freedom mechanical oscillatory systems with dry friction and one-sided rigid impact. Mech. Mach. Theory 151(2), 103928 (2020)
Gao, M., Fan, J.: Discontinuous dynamics for a class of 3-DOF friction and collision system with symmetric bilateral rigid constraints. Nonlinear Dyn. 106, 1739–1768 (2021)
Luo, A.: Discontinuous Dynamical Systems. Higher Education Press, Beijing (2012)
Luo, A., Mosadman, M.: Singularity, switchability and bifurcations in a 2-DOF, periodically forced, frictional oscillator. Int. J. Bifurc. Chaos 23(3), 1330009 (2013)
Acknowledgements
This research was supported by the Natural Science Foundation of Shandong Province, China (No. ZR2019MA048) and the National Natural Science Foundation of China (No. 11971275).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
When the elastic constraint \(k _{3}\) is not compressed, the system M and the mass \(m _2\) are independent of each other. The phase space of the system M is divided into ten 4-dimensional domains, seventeen 3-dimensional boundaries, ten 2-dimensional edges and two 1-dimensional edges as follows.
The ten domains are defined as:
and the corresponding three-dimensional boundaries are defined by \(\partial \Omega _{\alpha _1\alpha _2}^{(ns)}=\bar{\Omega }_{\alpha _1}^{(ns)}\cap \bar{\Omega }_{\alpha _2}^{(ns)}\) for (\(\alpha _{i }\in \{1,2,\ldots ,9,a\}, i =1,2;\,\,\alpha _1\ne \alpha _2\) without repeating), i.e.,
Finally, the two-dimensional edges of the three-dimensional boundaries are defined by \(\angle \Omega _{\alpha _1\alpha _2\alpha _3}^{(ns)}=\partial \Omega _{\alpha _1\alpha _2}^{(ns)}\cap \partial \Omega _{\alpha _2\alpha _3}^{(ns)}=\cap _{i =1}^{3}\bar{\Omega }_{\alpha _{i }}^{(ns)}\) for (\(\alpha _{i }\in \{1,2,\ldots ,9,a\},\,\,i =1,2,3;\,\,\alpha _1\ne \alpha _2\ne \alpha _3\) without repeating), i.e.,
and the one-dimensional edges formed by the intersection of two-dimensional edges are defined by

Domains, boundaries and edges of system M in four-dimensional coordinates where the stick motion between masses \(m _1\) and \(m _2\) does not occur
The two-dimensional phase space of mass \(m _2\) is divided into two domains and three boundaries. The two domains are defined as:
and the corresponding boundaries are defined by

Domains and boundaries of mass \(m _2\) in two-dimensional coordinates where the stick motion between masses \(m _1\) and \(m _2\) does not occur
The region division, where the elastic constraint \(k _{3}\) does not function (i.e., \(x ^{(1)}-x ^{(2)}<d\)), is depicted in Figs. 16 and 17. In Fig. 16, the domain partition of system M with a certain value of \(x ^{(1)}\) is given. The intersection of the closures of any two domains \(\Omega _{\lambda }^{(ns)}\) \((\lambda =1,2,\ldots ,9,a)\) forms the corresponding boundary. The velocity boundary \(\partial \Omega _{\alpha _1\alpha _2}^{(ns)}\) \(((\alpha _1,\alpha _2)\in \{(1,2),(3,4),(5,6),(7,8),(9,a)\})\), which is expressed in the green plane, means that the velocity of \(m _1\) is zero. The velocity boundary \(\partial \Omega _{\alpha _3\alpha _4}^{(ns)}\) \(((\alpha _3,\alpha _4)\in \{(3,5),(4,6),(7,9),(8,a)\})\), which is expressed in the gray plane, means that the relative velocity between the pendulum ball \(m _3\) and the mass \(m _1\) is zero. The displacement boundaries \(\partial \Omega _{\alpha _5\alpha _6}^{(ns)}\) \(((\alpha _5,\alpha _6)\in \{(1,3),(1,5),(2,4),(2,6)\})\) and \(\partial \Omega _{\alpha _7\alpha _8}^{(ns)}\) \(((\alpha _7,\alpha _8)\in \{(1,7),(1,9),(2,8),(2,a)\})\), which represent the displacement difference between the pendulum ball \(m _3\) and the mass \(m _1\) as \(l\sin \theta _0\) and \(-l\sin \theta _0\), are shown in dark blue and steel blue planes, respectively. The intersection of the boundaries forms the edges represented by the red solid lines and the red dots. In Fig. 17, the domains \(\Omega _{\sigma }^{(2)}\) \((\sigma =1,2)\) of mass \(m _2 \), in which the stick motion does not occur, are represented in pink and orange, respectively. The velocity boundary \(\partial \Omega _{12}^{(2)}\) is depicted by the red dashed line; and the elastic impact boundaries \(^{1}\partial \Omega _{1\infty }^{(2)}\) and \(^{1}\partial \Omega _{2\infty }^{(2)}\) are depicted by the black dotted-dashed curves.
When the elastic constraint \(k _{3}\) is in action, the masses \(m _1\) and \(m _2\) will have stick motion. The domains, boundaries and edges of the system M in the stick motion can be expressed as:

Domains, boundaries and edges of system M in four-dimensional coordinates where the stick motion between masses \(m _1\) and \(m _2\) occurs
With stick motion, the domains and boundaries of the mass \(m _2\) are defined as:
The above regional division is depicted in Figs. 18 and 19. When the displacement difference between the masses \(m _1\) and \(m _2\) is greater than \(d \), the domains, boundaries and edges of system M are shown in Fig. 18. In Fig. 19, the stick domains \(\Omega _{3}^{(2)}\) and \(\Omega _{4}^{(2)}\) of mass \(m _2\) are represented by light blue and light gray, respectively. The velocity boundary \(\partial \Omega _{34}^{(2)}\) with stick motion is represented by yellow dashed line; and the displacement boundaries \(\partial \Omega _{13}^{(2)}\) and \(\partial \Omega _{24}^{(2)}\) are also represented by black dotted-dashed curves.
Appendix B
The regions and boundaries of mass \(m _1\) in two-dimensional coordinates are represented by Eqs. (B.1) and (B.2).

Domains and boundaries of mass \(m _2\) in two-dimensional coordinates where the stick motion between masses \(m _1\) and \(m _2\) occurs

Domains and boundaries of mass \(m _1\) in two-dimensional absolute coordinates

Relative domains and boundaries with stick motion for the two masses: a \(m _1\) and b \(m _2\)
In Fig. 20, the free domains \(\Omega _{1}^{(1)}\) and \(\Omega _{2}^{(1)}\) are, respectively, shown in pink and orange, and the stick domains \(\Omega _{3}^{(1)}\) and \(\Omega _{4}^{(1)}\) are, respectively, painted as light blue and light gray. The velocity boundaries \(\partial \Omega _{12}^{(1)}\) and \(\partial \Omega _{34}^{(1)}\) are painted as red and yellow dashed lines, respectively. The black dotted-dashed curves indicate the displacement boundaries \(\partial \Omega _{13}^{(1)}\) and \(\partial \Omega _{24}^{(1)}\).
The relative domains and boundaries of mass \(m _{i }\) \((i \ne \bar{i }\in \{1,2\})\) are expressed by
As shown in Fig. 21, the time-independent displacement boundaries \(\partial \Omega _{13}^{(i )}\) and \(\partial \Omega _{24}^{(i )}\) \((i \in \{1,2\})\) become black straight lines.
About this article

Cite this article
Li, J., Fan, J. Discontinuous dynamics of a 3-DOF oblique-impact system with dry friction and single pendulum device. Nonlinear Dyn 111, 4977–5021 (2023). https://doi.org/10.1007/s11071-022-08062-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-08062-6