
Abstract
This paper considers a class of spatially interconnected systems formed by ladder circuits using two-dimensional systems theory. The individual circuits in this class are described by hybrid (continuous/discrete) linear differential/difference equations in time (continuous) and spatial (discrete) variables and therefore have a two-dimensional systems structure. This paper shows that a ladder circuit model and models for 2-D dynamics have a well defined equivalence property and hence analysis tools can be transferred between them. Also the mechanism for transforming one to the other is established.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Spatially interconnected systems arise in a number of areas (D’Andrea and Dullerud 2003) (as one possible starting point for the literature) including electrical ladder networks/circuits, mechanical systems, composed, e.g, of masses and springs and heat transfer problems. For these systems, time and spatial dynamics can arise. Hence they can be treated as two dimensional, or 2-D, systems, which is the setting used in this paper.
In many cases, these systems are composed of a finite number of blocks or cells. Hence, for analysis, there is the option to embed the spatial dynamics into the system variables using a form of lifting based on the discrete (finite) spatial variable and obtain a system where time is the independent variable, referred to as a 1D system in some of the 2-D systems literature, see, e.g. Sulikowski et al. (2015). One drawback of this approach, for systems composed of a large number of cells, is the need to compute with matrices that have very large dimensions and hence possible computational issues. The 2-D systems setting does not involve increasing the dimensions of the matrices used to represent the dynamics.
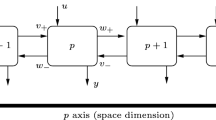
As one class, this paper considers electrical ladder networks or circuits, which are formed as a chain of blocks/cells that are identical in their structure. The passive parts of these cells are realized by longitudinal and transversal resistances, reactances, or, in general, impedances and the active parts by the addition of autonomous or controlled current and voltage sources. Application areas for ladder circuits include filter analysis and design, the modeling of delay lines and equivalent circuits for transmission lines, chains of transmission gates or long wire interconnections, e.g. Alioto et al. (2004), the approximation of distributed parameter systems, e.g. Schanbacher (1989) and in the simulation of physical systems. A representative example is shown in Fig. 1, where the upper diagram shows the overall system structure and the bottom the structure of an individual cell.

Ladder circuit as a spatially interconnected system
The dynamics of 2-D systems are characterized by information propagation in two independent directions and the independent variables can both be discrete, both continuous or mixed, i.e. one continuous and one discrete. Spatially interconnected systems, including ladder circuits, can be considered as a class of 2-D systems where the independent variables are the time, which can be continuous or discrete and the node/cell number, which has to be discrete. However, left–right and right–left dependence between neighboring cells are often needed. Such systems are not causal along the spatial axis, i.e. along the node/cell direction. Hence, they cannot be modeled by the standard and extensively investigated 2-D (Roesser 1975a) and (Fornasini and Marchesini 1976) state-space models. Also the well known stability analysis methods for these systems are not applicable.
Repetitive processes are another class of 2-D dynamics that arise in the modeling of physical systems. These processes operate over a finite time duration and the 2-D structure arises as repeated passes are made through the dynamics and the output on any pass explicitly contributes to the dynamics produced on the next one. Background on these processes and the control problems they pose can be found in Rogers et al. (2007).
The links between linear repetitive processes and the Roesser and Fornasini–Marchesini state-space models has been investigated in previous research. For example, in Galkowski et al. (1998) the conditions for local controllability of linear repetitive processes have been derived via their transformation into the singular 2-D Roesser or Fornasini–Marchesini form and in Galkowski et al. (1999), building on previous work cited in this reference, the equivalence of their stability properties was investigated. This previous research established stability tests can, in some but not all, cases be interchanged. This is true for one class of repetitive processes but other classes can exhibit dynamics that have no Roesser or Fornasini–Marchesini state-space model representation. More recent work in this general area includes (Boudellioua et al. 2016, 2017; Galkowski et al. 2017) where new results on system equivalence are reported.
It is to be expected that at least some of these results would apply to spatially interconnected systems whose dynamics are written as 2-D linear systems. This is the motivation for the current paper where system equivalence between the state-space models of ladder circuits and those for the singular 2-D Roesser or Fornasini–Marchesini systems. The problem of reducing by equivalence a general 2-D polynomial matrix to the singular Roesser form has been considered previously, e.g. Pugh et al. (2005) developed a method for reducing a general 2-D polynomial matrix to such a form. Their method uses a two-step algorithm which is then adapted to the case of a general polynomial system matrix. In this paper, a direct method is developed to reduce a 2-D polynomial system matrix arising from a class of ladder circuit systems to an equivalent singular 2-D Fornasini–Marchesini or Roesser state-space model. The transformation used is shown to be zero coprime system equivalence of the two system matrices. This type of equivalence has previously been considered in the literature, e.g. Levy (1981), Johnson (1993), Boudellioua (2012), Pugh et al. (1996) and Pugh et al. (1998).
2 State-space models and associated transfer functions
In this paper, the general problem considered is the equivalence between ladder circuits and commonly used Roesser and Fornasini–Marchesini models for 2-D linear systems. In the remainder of this section, the relevant state-space models are introduced.
2.1 Ladder circuits
Applying Kirchhoff’s laws, the dynamics of ladder circuits, see Fig. 2 for the configuration and layout, can be written in the form of a 2-D differential-discrete linear systems state-space model, see Sulikowski et al. (2015), where the independent variables are time and the node numbers \(p=0,1,\ldots , \alpha -1.\) The resulting model is
where x(p, t) and u(p, t), respectively, denote the state and input vectors. In this paper, the particular case of an active ladder circuit of the from of Fig. 1 is considered, which for onward analysis is considered in the form of Fig. 2, where the controlled sources \(i(p,t)=\gamma U_c(p-1,t)\) and \(E(p,t)=u(p,t)\) have been added to the nodes as possible control input variables but could also be an intrinsic part of a particular circuit.

A ladder chain
In this paper, the state vector for node p in Fig. 2 is defined as
and then the matrices in (1) are
The output equation is
where the matrix \({\mathcal {C}}\) depends on which signals are chosen as output variables. To complete the description, the following boundary conditions are assumed
Introduce the following differential and discrete, respectively, shift operators
Then the resulting transfer-function matrix under zero boundary conditions is
provided the inverse of the matrix \(z_1I_n-z_2{\mathcal {A}}_3-{\mathcal {A}}_2-z_2^{-1}{\mathcal {A}}_{1}\) exists.
2.2 2-D singular Fornasini–Marchesini model
A singular version of the 2-D Fornasini–Marchesini state-space model (Fornasini and Marchesini 1976) for discrete linear dynamics is
where x(i, j) is the state vector, u(i, j) is the input vector, y(i, j) is the output vector, E, \(A_{0}\), \(A_{1}\), \(A_{2}\), B, C and D are constant real matrices of compatible dimensions and E is a singular matrix. In this paper, the model (1) is continuous in time t and therefore the differential version of singular 2-D Fornasini–Marchesini state-space model, is required, i.e.
where \({\mathbf {x}}(p,t)\) is the state vector, \({\mathbf {u}}(p,t)\) is the input vector, \({\mathbf {y}}(p,t)\) is the output vector, p denotes the node number and the matrices are as in (1). If E is nonsingular in either model then the standard (or nonsingular) model is obtained.
Note 1
In this paper differential dynamics are considered. If, however, the system is sampled then the analysis still applies with the shift operator \(z_{1}\) in (6) defined as a forward shift operator in t.
For systems described by (9), using the operators in (6) gives the transfer-function matrix for zero boundary conditions
2.3 2-D singular Roesser model
A discrete singular Roesser state-space model (1975a) is given by
where \(x^{h}(i, j)\in {\mathbb {R}}^{n_1}\) is the horizontal state vector, \(x^{v}(i,j)\in {\mathbb {R}}^{n_2},\) is the vertical state vector, \(y(i,j)\in {\mathbb {R}}^m\) is the output vector, \(u(i,j)\in {\mathbb {R}}^l\) is the input vector and the matrix E is square and singular. In this model, static in both directions i and j links between sub-vectors are allowed. If E is nonsingular then (as in the Fornasini-Marchesini model) the standard model is obtained. The boundary conditions are \(x^h(0,j) = f(j),\, j \ge 0\) and \(x^v(i,0) = d(i),\, i \ge 0,\) where the \(n_1 \times 1\) vector f(j) and the \(n_2 \times 1\) vector d(i) have known constant entries.
This paper requires the differential Roesser model given by
Using the shift operators \(z_1\) and \(z_2\) and assuming zero boundary conditions and that the matrix \(z_1E_1+z_2E_2-A\) is invertible, the transfer-function matrix corresponding to (12) is
where
3 Polynomial system matrix descriptions and system equivalence
One general description of a 2-D linear system, in common with (Rosenbrock 1970) for the 1-D linear systems case, is the polynomial form
where \(x\in {\mathbb {R}}^n\) is the state vector, \(u\in {\mathbb {R}}^l\) is the input vector and \(y\in {\mathbb {R}}^m\) is the output vector, T, U, V and W are polynomial matrices with elements in \({\mathbb {R}}[z_1,z_2]\) of dimensions \(n\times n, n\times l, m\times n\) and \(m\times l,\) respectively. The meaning of the operators \(z_1\) and \(z_2\) depend on the case considered as detailed in the previous section.
A system described by (14) can be rewritten as
where
Assuming that \(T(z_1,z_2)\) is invertible and the system matrix in (16) is regular, the associated transfer-function matrix is
Using \(P(z_{1}, z_{2})\), the equivalence between systems can be studied, where numerous forms of this property are known in n-D systems. One of these for 2-D system matrices is zero coprimeness, see, e.g. Levy (1981), and Johnson (1993). This equivalence may be viewed as an extension of Fuhrmann’s strict system equivalence (Fuhrmann 1977) from 1-D to 2-D systems and is defined as follows.
Definition 1
Let \({\mathbb {P}}(m,l)\) denote the class of \((n+m)\times (n+l)\) with polynomial system matrices in \(z_1\) and \(z_2\) with real coefficients. Two polynomial system matrices \(P_1(z_1,z_2)\) and \(P_2(z_1,z_2)\)\(\in {\mathbb {P}}(m,l)\), are said to be zero coprime system equivalent if they satisfy
where \(P_1(z_1,z_2),S_2(z_1,z_2)\) are zero right coprime, \(P_2(z_1,z_2),S_1(z_1,z_2)\) are zero left coprime and \(M(z_1,z_2)\), \(N(z_1,z_2)\), \(X(z_1,z_2)\) and \(Y(z_1,z_2)\) are polynomial matrices of compatible dimensions.
The system matrix can be used to study critical systems properties such as controllability, observability and stability. In the case of 2-D linear systems, the zero structure of their associated system matrices, see, e.g. Zerz (2000), Johnson (1993), Levy (1981), Pugh et al. (1998), and Pugh et al. (1996), is of particular interest. One result is the following.
Lemma 1
(Johnson 1993) Zero coprime system equivalence preserves the transfer-function matrix and the zero structure of the matrices
The system matrix associated with the ladder circuit of (1) and (4) is
An alternative description of (1) and (4) is obtained by forward shifting the node number in the state equations, which corresponds to multiplication by the shift operator \(z_2\). This corresponds to multiplying the system matrix \(P_{LC}\) in (19) from the left by the following matrix that preserves the transfer-function matrix
resulting in the polynomial system matrix
A system described by (9) can be written as
with polynomial system matrix
Similarly a system described by (12) can be written as
with polynomial system matrix
Next, conditions under which the polynomial system matrix of the ladder circuit is equivalent to (9) are established.
4 Transformation of the ladder circuit model to a differential Fornasini–Marchesini model
The polynomial system matrix of (20) can be written as
Also introduce the matrices
and hence the polynomial system matrix
This matrix corresponds to that of (22) with
Theorem 1
The polynomial system matrices (27) and (20) are zero coprime equivalent i.e.
where
Proof
The matrix of (27) can be written as
where \({\mathcal {F}}_k=\left[ \begin{array}{cc}0_{k,n}&I_k\end{array}\right] \) and hence (29) holds, i.e.
Finally, zero right coprimeness of the two matrices follows since the matrix
contains a minor of order \(n+l\) (the identity submatrix). Similarly, zero left coprimeness of the two matrices follows immediately since
where
and
has a highest order minor equal to 1 obtained by deleting the columns \(n+l+1,\ldots ,2(n+l)\) from the matrix in (34). \(\square \)
5 Equivalence of the ladder circuit and the differential singular Roesser model
The polynomial system matrix (20) can be written as
Introduce the matrices
Then the polynomial system matrix in singular differential Roesser form is given by
where \({\mathcal {F}}_{r,k}=[0_{r,k-r}\;I_r]\).
Theorem 2
The system matrices (37) and (20) are zero coprime system equivalent, i.e.
where
Proof
It can be verified that
and it remains to establish the zero coprimeness of the matrices, where zero right coprimeness of \({\tilde{P}}_{LC}\) and \(S_2\) follows from the fact that the matrix \(\left[ \begin{array}{c} {\tilde{P}}_{LC}\\ S_2 \end{array} \right] \) contains a highest order minor of order \(n+l\) which is equal to 1. The zero left coprimeness of \(P_{SR}\) and \(S_1\) follows since the matrix
has a highest order minor of order \(2[2(n+l)+l+m]+m\) which is equal to \(\pm 1\), obtained by deleting the second and third block columns of the matrix in (41). \(\square \)
6 Conclusions
In this paper, an equivalent representation is obtained in the form of 2-D Fornasini–Marchesini and Roesser singular state-space models for a given system matrix arising from a hybrid linear ladder circuit system. The exact connections between the original system matrix with its corresponding 2-D singular forms have been developed and shown to be zero coprime system equivalence. Also the zero structure of the original polynomial system matrix is preserved, making it possible to analyze the polynomial system matrix in terms of its associated 2-D singular form. Moreover, the transformation matrices include identity sub-matrices and this suggests that these transformations can be generated by finite sequences of elementary row/column operations together with trivial inflation/deflation of the polynomial system matrices. This area is the subject of ongoing research. Also the implications of these results in terms of the structure and design of control laws is also under investigation.
References
Alioto, M., Palumbo, G., & Poli, M. (2004). Evaluation of energy consumption in RC ladder circuits driven by a ramp input. IEEE Transactions on Very Large Scale Integration (VLSI) Systems, 12(10), 1094–1107.
Boudellioua, M., Galkowski, K., & Rogers, E. (2017). Reduction of discrete linear repetitive processes to nonsingular Roesser models via elementary operations. In IFAC 2017 World Congresss, Toulouse, France (p. 2017).
Boudellioua, M. S. (2012). Strict system equivalence of 2D linear discrete state space models. Journal of Control Science and Engineering, 2012(Art. ID 609276): 6 pages.
Boudellioua, M. S., Galkowski, K., & Rogers, E. (2016). On the connection between discrete linear repetitive processes and 2-D discrete linear systems. In Multidimensional systems and signal processing, 11. https://doi.org/10.1007/s11045-016-0454-8.
D’Andrea, R., & Dullerud, G. (2003). Distributed control design for spatially interconnected systems. IEEE Transactions on Automatic Control, 48(9), 1478–1495.
Fornasini, E., & Marchesini, G. (1976). State space realization theory of two-dimensional filters. IEEE Transactions on Automatc Control, AC–21(4), 484–492.
Fuhrmann, P. A. (1977). On strict system equivalence and similarity. International Journal Control, 25(1), 5–10.
Galkowski, K., Boudellioua, M., Rogers, E. (2017). Reduction of wave linear repetitive processes to singular roesser model form. In The 23rd international conference on methods and models in automation and robotics (MMAR 2017), Miedzyzdroje, Poland.
Galkowski, K., Rogers, E., & Owens, D. H. (1998). Matrix rank based tests for reachabiltiy/controllability of discrete linear repetitive processes. Linear Algebra and its Applications, 275–276, 201–224.
Galkowski, K., Rogers, E., & Owens, D. H. (1999). New 2D models and a transition matrix for discrete linear repetitive processes. International Journal of Control, 72(5), 1365–1380.
Johnson, D. S. (1993). Coprimeness in multidimensional system theory and symbolic computation. Ph.D thesis, Loughborough University, UK.
Levy, B. C. (1981). 2-D polynomial and rational matrices and their applications for the modelling of 2-D dynamical systems. Ph.D. thesis, Stanford University, USA
Pugh, A. C., McInerney, S. J., Boudellioua, M. S., Johnson, D. S., & Hayton, G. E. (1998). A transformation for 2-D linear systems and a generalization of a theorem of Rosenbrock. International Journal Control, 71(3), 491–503.
Pugh, A. C., McInerney, S. J., & El-Nabrawy, E. M. O. (2005). Equivalence and reduction of 2-D systems. IEEE Transactions on Circuits and Systems-II: Express Briefs, 52(5), 271–275.
Pugh, A. C., McInerney, S. J., Hou, M., & Hayton, G. E. (1996) A transformation for 2-D systems and its invariants. In Proceedings of the 35th IEEE conference on decision and control, pp. 2157–2158, Kobe (Japan).
Roesser, R. P. (1975). A discrete state-space model for linear image processing. IEEE Transactions on Automatic Control, 20(1), 1–10.
Rogers, E., Galkowski, K., & Owens, D. H. (2007). Control systems theory and applications for linear repetitive processes. Control and Information Sciences. Berlin, Heidelberg: Springer.
Rosenbrock, H. H. (1970). State space and multivariable theory. London, New York: Nelson-Wiley.
Schanbacher, T. (1989). Aspects of positivity in control theory. SIAM Journal on Control and Optimization, 27(3), 457–475.
Sulikowski, B., Galkowski, K., & Kummert, A. (2015). Proportional plus integral control of ladder circuits modeled in the form of two-dimensional (2D) systems. Multidimesional Systems and Signal Processing, 26(1), 267–290.
Zerz, E. (2000). Topics in multidimensional linear systems theory. London: Springer.
Acknowledgements
This work has been supported by Sultan Qaboos University (Oman) and also by the National Science Centre in Poland, Grant No. 2015/17/B/ST7/03703.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supported by Sultan Qaboos University (Oman) and by National Science Centre in Poland, Grant No. 2015/17/B/ST7/03703.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Boudellioua, M.S., Galkowski, K. & Rogers, E. Characterization of a class of spatially interconnected systems (ladder circuits) using two-dimensional systems theory. Multidim Syst Sign Process 30, 2185–2197 (2019). https://doi.org/10.1007/s11045-019-00644-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11045-019-00644-9