
Abstract
Semi Reentrant structures, which exhibit zero Poisson’s ratio and monoclastic curvature, are combinations of hexagonal Honeycomb and auxetic Reentrant structures. Deflections and strain analysis based on the deformation of unit cells were conducted, and four different equivalent theories for predicting the elastic modulus and Poison’s ratio in two in-plane directions were developed by considering different mechanisms, including flexural, stretching, hinging and shearing deformations, as well as the influence of cell wall thickness. Single sidewall and double sidewall were considered for the cell wall thickness. The theoretical models of Semi Reentrant structures cell could be obtained by assuming that the deformation is a combination of deformation for a hexagonal honeycomb cell (with a positive angle) and a Reentrant cell (with a negative angle). The effectiveness and accuracy of the four theoretical models for Semi Reentrant structures were validated by comparing with the corresponding tensile test simulation results via the finite element method. It was indicated that the fourth theories (T4) were the most accurate, which include the consideration of flexural, stretching, hinging, shearing deformations and cell wall thickness. The influence of geometrical parameters (inclined arm length l, vertical arm length h, angle α, angle β, structure thickness d and cell wall thickness t) on the in-plane tensile properties (elastic modulus and stiffness) was also analysed in tensile test simulations via the finite element method. Comparison of tension results between Semi Reentrant, Reentrant and Honeycomb demonstrated that the mechanical properties of Semi Reentrant were combinations between the others.
Similar content being viewed by others

1 Introduction
Skeletal honeycomb structures are widely used as core materials for flat sandwich panels, due to their advantages in lightweight, high-stiffness, stability, low manufacturing costing, etc. They can produce anticlastic or saddle-shaped curvature (see Fig. 1) because of the positive Poisson’s ratio for out-of-plane bending [1, 2]. However, it is difficult to apply honeycomb structure for applications requiring dome-like shape, such as shields for radome or airplane nose. Such curvature can only be achieved by forcing honeycomb structures into the required shape which cause local crushing or excessive deformation, or by machining and stitching which will cause material wastage and thus more cost and time consuming. Reentrant structures, on the contrary, have negative Poisson’s ratio and synclastic curvature (see Fig. 1). They can be easily manufactured into dome-shape structure under bending forces [1, 3,4,5,6], and show auxetic and many other advanced properties. [3, 7, 8].

Three types of bending curvatures for Honeycomb, Semi Reentrant and Reentrant structures
For skeletal structures, the in-plane Poisson’s ratio is dependent on the geometric configurations of structures, while the bending stiffness is related to the deformation mechanism or the material properties [9, 10]. For Honeycomb structures, the flexure and stretching of the cell walls and hinging at junctions of cell walls [2] like beams are generally considered as the main formation mechanism. Based on these mechanisms, many researchers have developed theoretical models for in-plane modulus of specific structures [9, 11]. For honeycomb structures, simple models of elastic modulus and Poisson’s ratios have been established, by using the deflections/strains of the beams in a unit cell to predict the tension property of the whole structure, which show good agreement with the experimental data [9, 11]. Shear deflections have been taken into consideration together with flexural deflection and stretching, which show good enhancement in the prediction accuracy [2] [12].
Different approaches have been proposed for evaluating the in-plane properties of the cellular structures by considering flexural, stretching or hinging deformation [2, 13, 14]. The flexural deformation is normally considered as the dominant mechanism, with some contributions from stretching and hinging as well. It is reported that hinging is the dominant deformation for cardboard honeycomb structure [15, 16]. Stretching and hinging deformation have been both considered for predicting the Poisson’s ratio of Honeycomb and Reentrant structures [12, 17] and related micro-structures [18]. Some models have been developed for conventional honeycomb structures and reticulated foams [11]. Master et al. [2] have proposed theoretical models of honeycomb structures based on the deformation of flexural, stretching and hinging. For Reentrant structures with negative Poisson’s ratio or auxetic property [18], its equivalent expressions can be obtained by substituting negative angle -θ (compared to the positive angle θ of Honeycomb cells) into the deformation equations for the Honeycomb structures, [2]. More recently, based on idealized mechanisms, some researchers [19] have developed analytical models including the plastic, nonlinear behaviours of cell walls into consideration. Wang et al. [20] proposed analytical models of elastic modulus and Poisson's ratios for a 3D Reentrant cellular structure based on energy method. For star-shaped Reentrant lattice structures, Ai and Gao [21] established a new model using energy method, which considered the stretching, transverse shearing and bending deformations in the analysis. Wan et al. [22] also developed analytical approach to predict negative Poisson’s ratios of Reentrant structures based on the large deflection model. Chen et al. [23] calculated the linear-elastic and buckling responses of a new nano-honeycomb and hierarchical structures. The enhanced Reentrant structure was then proposed with new inclined walls being added and its prediction models of Young’s modulus and Poisson's ratios were also developed [24]. Qiu et al. [25] proposed a effective elastic modulus expression based on a deformable cantilever beamis to evaluate the effective elastic properties of flexible chiral honeycomb cores under conditions of large deformation.Henyš et al. [26] studied the estimation of the shear elasticity based on the classical isotropic continuum elasticity relations of the auxetic metamaterials. Moreover, Burlayenko and Sadowski [27] have evaluated the effective elastic properties of foam-filled honeycomb coresthe displacement-based homogeneous technique by using 3D finite element analysis. Burlayenko and Sadowski [28, 29] also have worked for proposed the unit cell strain energy homogenization approach based on the finite element method, and studied the effect of foam filler on elastic properties of a regular hexagonal aluminum honeycomb core.
However, for other skeletal structures, such as Semi Reentrant structures [30, 31], limited studies have been reported after Grima et al. [30, 31]. The Semi Reentrant structures can be considered as a type of hybrid structure which combine both the Honeycomb cells and Reentrant cells (see Fig. 2). They exhibit zero Poisson’s ratio in one direction and a higher elastic modulus in the orthogonal direction. Therefore, they can be deformed into curved surfaces for cylindrical type of applications [30, 31]. A Semi Reentrant structure has a monoclastic surface or tube-shape deformation [32] when loaded out-of-plane, which is difficult to be obtained for Honeycomb or Reentrant structures, as shown in Fig. 1. Grima et al. [30, 31] proposed a simple model for predicting the Poison’s ratio and modulus of such structure, which only considered the flexural deformation of the unit cell.

Schematic diagram of the Semi Reentrant structures
In this study, the mechanical properties and deformation of Semi Reentrant structures in in-plane tensile test process were investigated. The deflections and strain were analysed based on the deformation of a unit cell, and four different equivalent theories for predicting the elastic modulus and Poison’s ratio in two in-plane directions were established by considering different mechanisms, including flexural, stretching, hinging and shearing deformations, as well as the influence of cell wall thickness. Two conditions of cell wall thicknesses (i.e. single sidewall and double sidewall) were considered. The theoretical models of Semi Reentrant structural cells could be obtained by assuming that the deformation for a Semi Reentrant cell is a combination of deformation for a hexagonal honeycomb cell (with a positive angle) and a Reentrant cell (with a negative angle). The effectiveness and accuracy of these four theoretical models for Semi Reentrant structures were validated against the corresponding tensile test simulation results via the finite element method. The influence of geometrical parameters on the in-plane tensile properties was also analysed in tensile test simulations via the finite element method.
2 Equivalent theory of Semi Reentrant core structures
2.1 Relative density
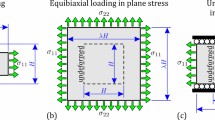
The geometrical diagram of Semi Reentrant structure is shown in Fig. 3, where d is thickness or depth of structure, l and h are length of inclined arm and length of vertical arm, respectively. t is the thickness of cell wall, and α and β are two angles between the inclined and vertical arms. Besides, due to the different fabrication processes, the vertical arms thickness of a Semi Reentrant cell structure could be similar to inclined arms with t (i.e. Single sidewall condition), or double it with 2t (i.e. Double sidewall condition), as shown in Fig. 3.

Illustration of single sidewall and double sidewall for the vertical arms thickness
For a Semi Reentrant core structure, its actual mass is equal to \({m}_{c}={{\mathrm{V}}_{c}{\rho }_{c}=\mathrm{V}}_{A}{\rho }_{A}\). Where \({\mathrm{V}}_{A}\) is the practical volume of material involved in a unit cell, and \({\rho }_{A}\) is the density of material used for the structure. The volume of the unit cell structure of a Semi Reentrant core structure is \({\mathrm{V}}_{c}=ldcos\alpha (lsin\alpha +2h-lcos\alpha tan\beta )\). The relative density of a Semi Reentrant core structure could be expressed as \({\rho }_{c}/{\rho }_{A}=\frac{{m}_{c}}{{\mathrm{V}}_{c}}/{\rho }_{A}=\frac{{\mathrm{V}}_{A}}{{\mathrm{V}}_{c}}\). There are two conditions of vertical wall thickness:
-
1.
Single sidewall condition: All walls have the same thickness of t:
The relative density of a Semi Reentrant structure under single sidewall condition is:
-
2.
Double sidewall condition: A Double sidewall consists of two side walls attached together (vertical arms) and has a thickness of 2t. The other walls (4 inclined arms) have a thickness of t. Hence,
The relative density of a semi reentrant structure under double sidewalls condition is:
2.2 Equivalent theory based on different deformation mechanisms
Based on the studies from Masters et al. [2], the theoretical model has been developed for predicting the elastic constants of honeycombs based on flexural, stretching and hinging deformation. The model has been used to derive the expressions for the tensile modulus, shear modulus and Poisson’s ratio. This theory could also be applied into Reentrant structures with a negative angle. For the novel semi-reentrant structures, the theoretical model could be developed by considering the combination of hexagonal honeycomb and Reentrant cells (see Fig. 4). Besides, the Timoshenko beam theory [33] considering the shear deformation [2] is also useful for the honeycomb structure when calculate the tension properties. Moreover, the influence of the cell wall thickness on the deformation is also significant as reported in some references for Honeycomb structures [34, 35]. Here, taking these different mechanisms (flexural, stretching, hinging and shear deformation, and influence of cell wall thickness) together can obtain the varied predicting models. Main four equivalent theories for predicting tensile modulus and Poisson’s ratio have been developed for semi-reentrant structures.The main deformation mechanisms applied in four equivalent theories are summarized in Table 1.

Cell geometry and coordinate system used for hexagonal cells
It should be noted that for the Reentrant part, when \(h-{l}_{2}sin\beta >h/2\), the unit cell size should be \(h-{l}_{2}sin\beta\); When \(h-{l}_{2}sin\beta <h/2\), the unit cell size should be \({l}_{2}sin\beta\).
2.2.1 Equivalent theory based on flexural, stretching and hinging deformation (T1)
2.2.1.1 Elastic modulus (E1) and Poison’s Ratio (ν12) in the x direction
Firstly, for the honeycomb structure loaded in direction x (as shown in Fig. 5a), the total deflection in the x and y directions caused by flexural deformation (\({\delta }_{f1}=\frac{{\sigma }_{x}d{l}_{1}{cos}^{3}\alpha }{{K}_{f1}}\), \({\delta }_{f2}=\frac{{-\sigma }_{x}d{l}_{1}{cos}^{2}\alpha sin\alpha }{{K}_{f1}}\)) [10, 11], stretching deformation (\({\delta }_{s1}=\frac{{\sigma }_{x}dcos\alpha {(2h+l}_{1}{sin}^{2}\alpha )}{{K}_{s1}}\), \({\delta }_{s2}=\frac{{\sigma }_{x}d{l}_{1}{cos}^{2}\alpha sin\alpha }{{K}_{s1}}\)) [2] and hinging deformation (\({\delta }_{h1}=\frac{{\sigma }_{x}d{l}_{1}{cos}^{3}\alpha }{{K}_{h1}}\), \({\delta }_{h2}=\frac{{-\sigma }_{x}d{l}_{1}{cos}^{2}\alpha sin\alpha }{{K}_{h1}}\)) [2] can be expressed as [2]:
where Kf1 is the flexure rigidity, and \({K}_{f1}\)=\(\frac{{E}_{s}d{t}^{3}}{{l}_{1}^{3}}\). Es is the Modulus of the cell materials. d is the thickness of the cell structures, h is the length of the vertical arms, and l1is the length of the inclined arms. KS1 is stretching rigidity, \({K}_{s1}\)=\(\frac{{E}_{s}dt}{{l}_{1}}\). Kh1 is the hinging rigidity. The shear mechanism is important when considering small cell foams and molecular networks. For the shear model \({K}_{h1}\)=\(\frac{{G}_{s}dt}{{l}_{1}}\). But it is unrealistic for the macro networks, like honeycombs, where hinging is obviously a local effect, as described in Reference [2]. So for honeycomb structures, \({K}_{h1}\)=\(\frac{{E}_{s}d{t}^{3}}{{6l}_{1}^{2}{q}_{1}}\). q1 is the axial length of the hinge as a short curved beam in the vicinity of the cell node (q1 = l1/10).

Tension diagrams in x and y directions for Honeycomb, Reentrant and Semi Reentrant cells
For the Reentrant structure with angle β and length of the inclined arms l2, when it is loaded in the x direction (as shown in Fig. 5b), by substituting negative angle -β (compared to the angle of Honeycomb structure) into the equations for Honeycomb structure, we can obtain the equivalent expressions for the Reentrant cell [2]. The total deflection in the x and y directions caused by flexural, stretching and hinging deformation can be expressed as follows.
where Kf2 is the flexure rigidity, \({K}_{f2}\)=\(\frac{{E}_{s}d{t}^{3}}{{l}_{2}^{3}}\), and l2is the length of inclined arms. KS2 is stretching rigidity, \({K}_{s2}\)=\(\frac{{E}_{s}dt}{{l}_{2}}\). Kh2 is the hinging rigidity. \({K}_{h2}\)=\(\frac{{E}_{s}d{t}^{3}}{{6l}_{2}^{2}{q}_{2}}\) and q2 = l2/10.
For the Semi Reentrant cell structures, its deflection should be a combination of the deformation of Honeycomb and Reentrant cells. For the Semi Reentrant cell, there exists the following relations \({l}_{1}cos\alpha\) = \({l}_{2}cos\beta\), as shown in Fig. 5c. Hence, when the Semi Reentrant structure is loaded in the x direction, its related deformation equations could be expressed as follows.
The deflection in the direction x of Semi Reentrant cell can be expressed by the sum of Eqs. (5) and (7):
The strain in direction x of the Semi Reentrant cell can be expressed as
The deflection of a Semi Reentrant cell in the y direction is unique, because half of the cell from Honeycomb and Reentrant cells are aligned in a row, so the deflection in the y direction should be expressed by the maximum of the deflection between Honeycomb and Reentrant cell. Or the deflection in the y direction of a Semi Reentrant cell can be described by the maximum of Eqs. (6) and (8):
The strain in the y direction of a Semi Reentrant cell can be expressed as
The tensile modulus in direction x (E1) can be described by the ratio of stress in direction x (σx) to the total strain in direction x (Eq. 10):
Dividing expression (12) by (10) gives the Poisson’s ratio \({\vartheta }_{12}\):
2.2.1.2 Elastic modulus (E2) and Poison’s Ratio (ν21) in the y direction
Secondly, when the honeycomb structure is loaded in the y direction as shown in Fig. 5a, the total deflection in the x and y directions caused by flexural deformation (\({\delta }_{f1}=\frac{{-\sigma }_{y}dcos\alpha sin\alpha (h+{l}_{1}sin\alpha )}{{K}_{f1}}\), \({\delta }_{f2}=\frac{{\sigma }_{y}d(h+{l}_{1}sin\alpha ){sin}^{2}\alpha }{{K}_{f1}}\)) [10, 11], stretching deformation (\({\delta }_{s1}=\frac{{\sigma }_{y}dcos\alpha sin\alpha (h+{l}_{1}sin\alpha )}{{K}_{s1}}\), \({\delta }_{s2}=\frac{{\sigma }_{y}d(h+{l}_{1}sin\alpha ){cos}^{2}\alpha }{{K}_{s1}}\)) [2] and hinging deformation (\({\delta }_{h1}=\frac{-{\sigma }_{y}dcos\alpha sin\alpha (h+{l}_{1}sin\alpha )}{{K}_{h1}}\), \({\delta }_{h2}=\frac{{\sigma }_{y}d(h+{l}_{1}sin\alpha ){sin}^{2}\alpha }{{K}_{h1}}\)) [2] can be expressed as [2]:
When the Reentrant structure is loaded in the y direction as shown in Fig. 6b, the total deflections in the x and y directions caused by the flexural, stretching and hinging deformation can be expressed as follows,

FE models for tension in x and y directions
When the Semi Reentrant structure is loaded in the y direction as shown in Fig. 5c, the deflection in the x direction is the sum of Eqs. (15) and (17):
The strain in the x direction can be described by,
The deflection of the Semi Reentrant cell in the y direction can be expressed by the maximum value of Honeycomb and Reentrant cell structures. Or the deflections in the y direction of the Semi Reentrant cell can be described by the maximum of Eqs. (16) and (18):
The strain in the y direction can be described by,
The tensile modulus in direction y (E2) can be described by the ratio of stress (σy) to total strain in y direction (Eq. 22):
Dividing expression (20) by (22) gives the Poisson’s ratio :
2.2.2 Equivalent theory based on the Timoshenko beam theory without considering thickness of cell walls (T2)
2.2.2.1 Elastic modulus (E1) and Poison’s Ratio (ν12) in the x direction
Based on the Timoshenko beam theory [33], the shear deformation [2] is also considered for the honeycomb structure by combing the flexural and stretching deformation.
For a honeycomb structure when loaded in the x direction, the deflections in the x and y directions caused by the shear deformation could be expressed by:
Similarly, for Reentrant structures when loaded in the x direction, the deflection caused by the shear deformation can be expressed as:
Therefore, for Semi Reentrant structures loaded in the x direction, the deflection in the x direction considering flexural, stretching and shear deformation could be calculated by the sum of these deformations:
The strain in the x direction can be expressed as:
For the semi-reentrant structures loaded in the x direction, the deflection in the y direction considering flexural, stretching and shear deformation could be calculated by the maximum deflection between the Honeycomb cell and Reentrant cell:
So the strain in the y direction is,
Hence, the elastic modulus and Poison’s ratio could be expressed by:
2.2.2.2 Elastic modulus (E2) and Poison’s Ratio (ν21) in the y direction
For a honeycomb structure loaded in the y direction, the deflection caused by flexural, stretching and shear deformation could be expressed by:
Similarly, for the Reentrant structures loaded in the y direction, the deflection caused by flexural, stretching and shear deformation can be expressed as:
Therefore, for the semi-reentrant structures loaded in the y direction, the deflection in the y direction considering shear, flexural and stretching deformation could be calculated by the sum of these deformations:
The strain in the x direction can be expressed as:
For the Semi Reentrant structures loaded in the y direction, the strain in the y deflection considering shear, flexural and stretching deformation could be calculated by the maximum of the two deflections between the Honeycomb cell and Reentrant cell:
So the strain in the y direction can be expressed as:
Hence, the elastic modulus and Poison’s ratio could be expressed as:
2.2.3 Equivalent theory based on the Timoshenko beam theory considering the thickness of cell walls (T3)
However, the above methods do not consider the influence of the cell wall thickness t, which may also affect the deformation significantly. Hence, other researchers have proposed related models taking the thickness of cell walls into account for Honeycomb structures [34, 35]. However, there is no related reported study for Semi Reentrant structures.
2.2.3.1 Elastic modulus (E1) and Poison’s Ratio (ν12) in the x direction
For the honeycomb structure when loaded in the x direction, the total deflection caused by flexural deformation (\({\delta }_{f}=\frac{{W}_{1}{l}_{1}^{3}cos\alpha }{{E}_{s}d{t}^{3}}\)), stretching deformation (in inclined arm: \({\delta }_{st-i}=\frac{{W}_{1}{l}_{1}sin\alpha }{{E}_{s}dt}\), in vertical arm: \({\delta }_{st-v}=\frac{{W}_{1}h}{{E}_{s}dt}\)) and shearing deformation (\({\delta }_{sh}=\frac{{{W}_{1}l}_{1}cos\alpha \left(2.4+1.5{\nu }_{s}\right)}{{E}_{s}dt}\)) in the x and y directions could be expressed as:
The remote force in the inclined arms \({W}_{1}\) could be expressed as:
For the Reentrant structures with angle β and length of the inclined arms l2, when it is loaded in the x direction (as shown in Fig. 5b), its relevant relations considering different mechanisms (flexural, stretching and shear deformations) could be obtained. Therefore, for the semi-reentrant structures when loaded in the x direction, the total deflection caused by flexural, stretching and shearing deformation could be expressed by the sum of Honeycomb and Reentrant:
Then the strain in the x direction is described as follows:
where t’ is equal to t/2 and t for single sidewall condition and double sidewall condition, respectively.
The strain in the y direction can be described as follows:
Hence, the elastic modulus and Poison’s ratio are expressed as:
2.2.3.2 Elastic modulus (E2) and Poison’s Ratio (ν21) in the y direction
For the honeycomb structure loaded in the y direction, For the honeycomb structure when loaded in the x direction, the total deflection caused by flexural deformation (\({\delta }_{f}=\frac{{Pl}_{1}^{3}sin\alpha }{{E}_{s}d{t}^{3}}\)), stretching deformation (\({\delta }_{st}=\frac{{P}_{1}{l}_{1}cos\alpha }{{E}_{s}dt}\)) and shearing deformation (\({\delta }_{sh}=\frac{{{P}_{1}l}_{1}sin\alpha \left(2.4+1.5{\nu }_{s}\right)}{{E}_{s}dt}\)) in the x and y directions could be expressed as:
The remote force in the inclined arms \({P}_{1}\) can be expressed as:
For the Reentrant structure loaded in the y direction, its relevant relations considering different mechanisms (flexural, stretching and shear deformations) could be obtained by taking negative angle -β and l2 into above equations.
Therefore, for the semi-reentrant structures, for both single sidewall and double sidewall conditions when loaded in the y direction, the total deflections in the x direction caused by flexural, stretching and shearing deformation could be expressed by the sum of Honeycomb and Reentrant,
Then the strain in the x and y directions can be described as follows:
where \(t^\prime\) is equal to t/2 and t for single sidewall condition and double sidewall condition, respectively.
Hence, the elastic modulus and Poison’s ratio can be expressed as:
2.2.4 Equivalent theory based on flexural, stretching, shearing and hinging deformation considering cell wall thickness (T4)
Finally, by taking into account the combined influence of flexural, stretching, hinging and shearing (Timoshenko beam theory) deformations as well as the cell wall thickness, another modified model could be established.
2.2.4.1 Elastic modulus (E1) and Poison’s Ratio (ν12) in the x direction
For the honeycomb structure loaded in the x direction, the hinging deformation (Eq. 10) could be re-expressed by:
So the total deflection caused by flexural, stretching, shearing and hinging deformation in the x and y directions could be described as:
For the Reentrant structure loaded in the x direction, its relevant relations considering different mechanisms could be obtained by taking negative angle -β and l2 into above equations.
Therefore, for the semi-reentrant structures when loaded in the x direction, the total deflections caused by flexural, stretching and shearing deformation can be expressed by the sum of Honeycomb and Reentrant.
Then the strain in the x and y directions can be described as follows:
where t’ is equal to t/2 and t for single sidewall condition and double sidewall condition, respectively.
Hence, the elastic modulus and Poison’s ratio for single sidewall condition can be expressed as:
2.2.4.2 Elastic modulus (E2) and Poison’s Ratio (ν21) in the y direction
For the honeycomb structure loaded in the y direction, the hinging deformation could be re-expressed by:
So the total deflection in the x and y directions could be described as:
For the Reentrant structure loaded in the y direction, its relevant relations considering different mechanisms could be obtained by taking negative angle -β and l2 into above equations.
Therefore, for the semi-reentrant structures, for both single sidewall and double sidewall conditions when loaded in the y direction, the total deflections in the x direction caused by flexural, stretching and shearing deformation could be expressed by the sum of Honeycomb and Reentrant:
Then the strain in the x and y directions is described as follows:
where t’ is equal to t/2 and t for single sidewall condition and double sidewall condition, respectively.
Hence, the elastic modulus and Poison’s ratio can be expressed as:
Noted that all of the equivalent analysis in this study is based on the elastic small deflection.
3 Validation of theoretical models of semi-reentrant structures
To validate the accuracy of the equivalent theories presented above, the tensile test simulations of the Semi Reentrant structures were conducted, and the related elastic modulus and Poison’s Ratio were calculated and compared with the predictions from the equivalent theories.
Typical finite element models of tensile test simulations in the x or y directions are depicted in Fig. 6. Two kinds of materials (i.e. Al 3003 and 316L stainless steel used in 3D printing) were used for simulations under the two conditions for different cell wall thickness. The mechanical properties for the materials applied in the simulations are summarized in Table 2. Five different geometries were used in the simulations and the geometrical parameters were summarized in Table 4.
Both the width and height of the structures are 50 mm and the width and height of the rigid grid section are 20 mm and 50 mm respectively. The thickness of the structures and the rigid grip are 4 mm. The rigid grid section was tied with core structure in ABAQUS in Interaction module. A specific displacement/force was applied on the reference point of right rigid grip, and the reference point of the left rigid grip is totally fixed. Two rigid grips were meshed with C3D8R solid elements, and the Semi Reentrant structure was meshed by SR4 shell elements.
The stresses were calculated by the reaction forces (F) of the rigid grip section (S is the area of grip section, so stress is σ1 or σ2 = F/S). Strains (ε1 = ∆x/(h + lsinα-ltanβcosα), ε2 = ∆y/(2lcosα)) along both axes were computed from the displacements (∆x and ∆y) between two nodes on the central position of the structures. The Elastic–plastic stress–strain relationships for each test case were obtained (as shown in Fig. 7), and the Poisson’s ratios from the strains along both axes (ν21 = ε1/ε2 and ν12 = ε2/ε1) were computed. A typical deformation contour of the Semi Reentrant structure after tension is also shown in Fig. 7. The elastic modulus can be calculated by the ratio of stress to strain (E1 = σ1 /ε1 and E2 = σ2 /ε2) from the linear part of the stress–strain curve, and the final results are summarized in Tables 4, 5, 6 and 7 in Appendix for different conditions.

Deformation contours of Semi Reentrant structure after tension in y direction
The tensile test simulations under double sidewall condition with Al 3003 are adopted for both x and y directions, as shown in Tables 4 and 5. The tensile test simulations under single sidewall condition with 316L stainless steel in the tensile test simulation are adopted for both the x and y directions, as shown in Tables 6 and 7.
Figure 8 compares the predictions of modulus and Poison’s ratio between the equivalent theories and the Finite Element results. For both double sidewall condition with Al 3003 and single sidewall condition with 316L, it is found that the modulus in the x direction (E1) predicted by theory 4 (T4) is the most accurate. E1 predicted by theory 3 (T3) is higher than the corresponding Finite Element results, and the other two predictions (T1 and T2 tensile) are smaller than the corresponding Finite Element solutions. For the modulus in the y direction (E2) predicted by theory 4 (T4) is also the most accurate, and E1 predicted by the other three predictions (T1, T2 and T3) are larger than the corresponding Finite Element solutions. For the Poison’s ratio in the x or y directions (ν12 or ν21), the predictions from theory 4 (T4) are much closer to the corresponding Finite Element results, while the others are slightly different from the corresponding Finite Element data. In conclusion, the equivalent theory 4 (T4), which considers more deformation mechanisms (including flexural, stretching, hinging and shearing deformations as well as cell wall thickness), is the most effective and accurate model to predict the in-plane elastic modulus and Poison’s ratio for the Semi Reentrant structures. This may be due to the perfect agreement between the practical condition and the combined deformation mechanism of theory 4.

Comparison of predictions of elastic modulus and Poison’s Ratio
Besides, Fig. 9 compares the deflections of SR structures between the equivalent solutions from T4 and FE results for different geometrical sets. As shown in Fig. 6, the deflections in FE simulation are obtained by the post-processing of the deformed structures. It could be found that the predictions of the deflections from T4 are quite close to that of FE results, which provides a further conclusion that the T4 theory is effective and accurate to predict the in-plane elastic modulus and Poison’s ratio for the Semi Reentrant structures.

Comparison of predictions of elastic modulus and Poison’s Ratio
4 In-plane tension properties of the semi-reentrant structures
To study the influence of geometrical parameters on the tensile properties (elastic modulus and stiffness), tensile test simulations of the Semi Reentrant structures with different geometries were conducted and the stress–strain curves were obtained and compared.
The typical finite element models by tension along the x or y directions are similar in Sect. 3, as shown in Fig. 6. 316L stainless steel with single sidewall condition used in the simulations. The mechanical properties for the materials applied in the simulations are summarized in Table 2. A total of thirteen different geometries are used in the simulations and the geometrical parameters are summarized in Table 8. The Set-1 is the basic geometry, and the others are all varied from this set with one different parameter. Sets 1, 2 and 3 study the influence of the inclined arm l. Sets 1, 4 and 5 are about the effect of the vertical arm h. Sets 1, 6 and 7 are about the effect of the angle α. Sets 1, 8 and 9 are about the effect of the angle β. Sets 1, 10 and 11 study the influence of the structure thickness/depth d, and Sets 1, 12 and 13 study the influence of the cell wall thickness t. The predictions of elastic modulus and Poison’s ratio from the equivalent theory (T4) are also summarized in Table 7, and again its accuracy could be validated by comparing with the corresponding Finite Element results. The left figure is tension in the x direction and right one is tension in the y direction.
4.1 Influence of the inclined arm length l
Figure 10a compares the stress–strain curves for the Semi Reentrant structures for different inclined arm lengths l. It is shown that the tensile stiffness (elastic modulus) in both directions will increase as l increases. Moreover, the tensile stiffness (elastic modulus) in the y direction is usually larger than that in the x direction. For the tensile test process, there are generally three stages, including the linear elastic stage and the yielding plastic stage and finally the failure stage. The transition process from yielding stage to the failure stage is apparent and sharp for tension in the x direction, and that for tension in the y direction the trend is first smooth and then sharp. Besides, the yielding stage in the y direction is not as flat as that in the x direction. Moreover, with increased l, the yield stress in these strain–stress curves are reduced, the failure strain in the x direction also decreases but that in the y direction is marginally enhanced.


Influence of geometrical parameters on the tension properties, (a) inclined arm length l, (b) vertical arm length h, (c) angle α, (d) angle β, (e) structure thickness d, (f) cell wall thickness t
4.2 Influence of the vertical arm length h
Figure 10b compares the stress–strain curves for the Semi Reentrant structures with different vertical arm lengths h. It is shown that the tensile stiffness (elastic modulus) in both directions will increase as h increases. However, the variation in the x direction is not as obvious as that in the y direction. Besides, the tensile stiffness (elastic modulus) in the y direction changes more obviously than that in the x direction. Especially, with increased h, the yielding deformation stage in the strain–stress curve will be shortened. The yield stress and the failure strain in these strain–stress curves are decreased when tension in the y direction as h increases.
4.3 Influence of the angle α
Figure 10c compares the stress–strain curves for the Semi Reentrant structures for different angle α. It is indicated that the variation law of the tensile stiffness (elastic modulus) in the x direction is opposite to that in the y direction as α increases, i.e. the tensile stiffness (elastic modulus) in the x direction will be enhanced but will be reduced in the y direction with increased α. Besides, the tensile stiffness (elastic modulus) in the y direction is usually larger than that in the x direction. Moreover, the yield stress in the x direction increases, while the failure strain decreases. However, both of the yield stress and failure strain decrease in the y direction as α increases.
4.4 Influence of the angle β
Figure 10d compares the stress–strain curves for the Semi Reentrant structures for different angle β. The left curve is tension in the x direction and right one is tension in the y direction. It is indicated that the variation law of tensile stiffness (elastic modulus) in the x direction is opposite to that in the y direction as β increases, i.e. the tensile stiffness (elastic modulus) in the x direction will be reduced but that it will be enhanced in the y direction with increased β. Besides, the tensile stiffness (elastic modulus) in the y direction is usually larger than that in the x direction. Moreover, the yield stress in the x direction decreases, while the failure strain increases as β increases. However, both of the yield stress and failure strain increase in the y direction as β increases.
4.5 Influence of the structure thickness d
Figure 10e compares the stress–strain curves for the Semi Reentrant structures for different structure thickness d. It is shown that the tensile stiffness (elastic modulus) and yield stress will increase as d increases in both the x and y directions. Besides, the tensile stiffness (elastic modulus) in the y direction is usually larger than that in the x direction.
4.6 Influence of the cell wall thickness t
Figure 10f compares the stress–strain curves for the Semi Reentrant structures for different cell wall thickness t. It is indicated that the tensile stiffness (elastic modulus) and yield stress will increase as t increases in both the x and y directions, while the failure strain decreases in both the x and y directions. Besides, the tensile stiffness (elastic modulus) in the y direction is usually larger than that in the x direction.
To further study the advantages of Semi Reentrant structure, the tension properties of honeycomb and Reentrant structures are also conducted. The similar geometries are adopted for three kinds of cellular structures, i.e. l = d = 2 mm, h = 4 mm, t = 1 mm, α = β =30°, the geometric configurations are shown in Fig. 11. The width and height of three models are all about 50 mm. The simulations are conducted with single sidewall condition and Al 3003 material. The other settings in simulation are similar to that in section 3. Same as Eq. (2), the relative density of Honeycomb and Reentrant structures could be expressed as follows,

Geometric configurations of honeycomb, Reentrant and Semi Reentrant structures
As shown in Fig. 12, the tension stress-strain curves for three structures in x and y directions are summarized. It can be indicated that no matter tension in x or y direction, the elastic stiffness or modulus and yielding stress can be ordered as: Reentrant > Semi Reentrant > Honeycomb. The larger elastic stiffness means a better deformation resistance, and the results of Semi Reentrant demonstrates the combinations of mechanical properties between Reentrant and Honeycomb. Moreover, the elastic properties and yielding stress in x direction is obviously larger than that in y direction, which may be due to the better tension resistance of the vertical arms in these cellular structures. The detailed values of relative density, elastic modulus and yielding stress from simulations results are summarized in Table 3. The largest relative density of Reentrant structure is due to the reentrant angles which increase the materials involved in the cellular structure. Semi Reentrant structure has a medium relative density compared to the other two structures. It demonstrates Semi Reentrant could be a better option in application which combines the advantages of Reentrant (with large elastic stiffness or modulus and yielding stress) and Honeycomb (with small relative density).

Comparison of tension properties between honeycomb, Reentrant and Semi Reentrant structures
5 Conclusions
In this study, the tensile properties and deformation of Semi Reentrant structures were studied. The main conclusions were summarized as follows:
-
(1)
For Semi Reentrant structures, the theoretical model could be assessed by taking the combination of hexagonal honeycomb cell and Reentrant cell by considering the flexural, stretching, hinging and shearing deformations mechanisms, as well as the cell wall thickness. The effectiveness and accuracy of these theoretical models for Semi Reentrant structures were validated by comparing with the simulation results. It was indicated that the fourth theories considering all deformation mechanisms and cell wall thickness were the most accurate, which may be due to its perfect agreement between the practical condition.
-
(2)
The effect of geometrical parameters (l, h, α, β, d and t) on the tensile properties were analysed by using the finite element method. Tensile stiffness (elastic modulus) in y direction was usually larger than that in x direction. Tensile process included three stages, i.e. the linear elastic, the yielding plastic and the failure stages, and the transition process from the yielding stage to the failure stage was apparent and sharp for tension in x direction, while it was smooth for tension in y direction. Besides, the yielding stage in y direction was not as flat as that in x direction.
-
(3)
The tensile stiffness in both directions increased as l, h, d, and t increased. The yield stress were found to decrease as l, h increased while it increased as d, and t increased. The variation law of tensile stiffness and yield stress in the x direction was opposite to that in the y direction as α/β varied, i.e. they were enhanced or reduced in x direction but reduced or improved in y direction as α and β increased. The elastic stiffness and yielding stress could be ordered as: Reentrant > Semi Reentrant > Honeycomb. The mechanical properties of Semi Reentrant was combinations between Reentrant and Honeycomb.
Abbreviations
- d :
-
Thickness or depth of structure
- l :
-
Length of inclined arm
- h :
-
Length of vertical arm
- t :
-
Thickness of cell wall
- α :
-
Angle between the inclined and vertical arms
- β :
-
Angle between the inclined and vertical arms
- \({m}_{c}\) :
-
Mass of structure
- \({\mathrm{V}}_{A}\) :
-
Practical volume of material involved in a unit cell of SR structure
- \({\mathrm{V}}_{C}\) :
-
Volume of the unit cell structure of SR structure
- \({\rho }_{A}\) :
-
Density of material used for the structure
- \({\rho }_{C}\) :
-
Density of a Semi Reentrant core structure
- \({\rho }_{C-H}\) :
-
Density of a Honeycomb core structure
- \({\rho }_{C-R}\) :
-
Density of a Reentrant core structure
- \({l}_{1}/{l}_{2}\) :
-
Two lengths of inclined arm of SR structure
- E 1 :
-
Elastic modulus in direction x
- E 2 :
-
Elastic modulus in direction y
- \({\vartheta }_{12}\) :
-
Poisson’s ratio in direction x
- \({\vartheta }_{21}\) :
-
Poisson’s ratio in direction y
- \({\delta }_{f1}/{\delta }_{f2}\) :
-
Deflection in the x and y directions caused by flexural deformation
- \({\delta }_{s1}/{\delta }_{s2}\) :
-
Deflection in the x and y directions caused by stretching deformation
- \({\delta }_{h1}/{\delta }_{h2}\) :
-
Deflection in the x and y directions caused by hinging deformation
- \({\delta }_{1}/{\delta }_{2}\) :
-
Total deflection
- K f1 /K f2 :
-
Flexure rigidity in the x and y directions
- K S1 /K S2 :
-
Stretching rigidity in the x and y directions
- K h1 /K h2 :
-
Hinging rigidity in the x and y directions
- q 1 /q 2 :
-
Axial length of the hinge
- \({\sigma }_{x}\) :
-
Tension stress in x direction
- \({\sigma }_{y}\) :
-
Tension stress in y direction
- \({\varepsilon }_{1}\) :
-
Strain in direction x
- \({\varepsilon }_{2}\) :
-
Strain in direction y
- T1:
-
Equivalent theory based on flexural, stretching and hinging deformation
- T2:
-
Equivalent theory based on Timoshenko beam theory without thickness of cell walls
- T3:
-
Equivalent theory based on Timoshenko beam theory considering thickness of cell walls
- T4:
-
Equivalent theory based on flexural, stretching, shearing and hinging deformation considering cell wall thickness
References
Liu Y, Hu H (2010) A review on auxetic structures and polymeric materials. Sci Res Essays 5(10):1052–1063
Masters IG, Evans KE (1996) Models for the elastic deformation of honeycombs. Compos Struct 35(4):403–422
Lakes R (1993) Advances in negative Poisson’s ratio materials. Adv Mater 5(4):293–296
Carneiro V, Meireles J, Puga H (2013) Auxetic materials—a review. Mater Sci Poland 31(4):561–571
Lakes RS (2017) Negative-Poisson’s-ratio materials: auxetic solids. Annu Rev Mater Res 47(1):63–81
Evans KE (1991) The design of doubly curved sandwich panels with honeycomb cores. Compos Struct 17(2):95–111
Wang Y, Yu Y, Wang C, Zhou G, Karamoozian A, Zhao W (2020) On the out-of-plane ballistic performances of hexagonal, reentrant, square, triangular and circular honeycomb panels. Int J Mech Sci 173
Chen Z, Wu X, Xie YM, Wang Z, Zhou S (2020) Re-entrant auxetic lattices with enhanced stiffness: a numerical study. Int J Mech Sci 178
Gibson LJ, Ashby MF, Schajer GS, Robertson CI (1782) The mechanics of two-dimensional cellular materials. In: Proceedings of the Royal Society of London. A. Mathematical and Physical Sciences. 382:25–42.
El-Sayed FK, Jones R, Burgens IW (1979) The behaviour of honeycomb cores for sandwich panels. Composites. 10.
Gibson LJ, Ashby MF (1999) Cellular solids: structure and properties. Cambridge University Press, Cambridge
Warren WE, Kraynik AM (1987) Foam mechanics: the linear elastic response of two-dimensional spatially periodic cellular materials. Mech Mater 6(1):27–37
Gillis PP (1984) Calculating the elastic constants of graphite. Carbon 22(4–5):387–391
Nkansah MA, Evans KE, Hutchinson IJ (1994) Modelling the mechanical properties of an auxetic molecular network. Model Simul Mater Sci 2(3):337
Caddock BD, Evans KE, Masters G. Honeycomb cores with a negative Poisson’s ratio for use in composite sandwich panels. In: Proceedings of the 8th International Corzference on Composite Materials
Masters IG, Evans KE (1993) Auxetic honeycombs for composite sandwich panels. In: Proceedings of the 2nd Canudian Conference on Composite Materials, cd. W. Wallace, R. Gauvin and S. V. Hoa.
Warren TL (1990) Negative Poisson’s ratio in a transversely isotropic foam structure. J Appl Phys 67(12):7591–7594
Evans KE, Nkansah MA, Hutchinson IJ, Rogers SC (1991) Molecular network design. Nature 353(6340):124
Zhang J, Lu G, Ruan D, Wang Z (2018) Tensile behavior of an auxetic structure: analytical modeling and finite element analysis. Int J Mech Sci 136:143–154
Wang X, Wang B, Li X, Ma L (2017) Mechanical properties of 3D re-entrant auxetic cellular structures. Int J Mech Sci 131–132:396–407
Ai L, Gao XL (2018) An analytical model for star-shaped re-entrant lattice structures with the orthotropic symmetry and negative Poisson’s ratios. Int J Mech Sci 145:158–170
Wan H, Ohtaki H, Kotosaka S, Hu G (2004) A study of negative Poisson’s ratios in auxetic honeycombs based on a large deflection model. Eur J Mech A Solids 23(1):95–106
Chen Q, Pugno NM (2013) In-plane elastic properties of hierarchical nano-honeycombs: The role of the surface effect. Eur J Mech A Solids 37:248–255
Baran T, Öztürk M (2020) In-plane elasticity of a strengthened re-entrant honeycomb cell. Eur J Mech A Solids. 83
Qiu K, Wang R, Wang Z, Zhang W (2018) Effective elastic properties of flexible chiral honeycomb cores including geometrically nonlinear effects. Meccanica 53(15):3661–3672
Henyš P, Vomáčko V, Ackermann M, Sobotka J, Solfronk P, Šafka J, Čapek L (2019) Normal and shear behaviours of the auxetic metamaterials: homogenisation and experimental approaches. Meccanica 54(6):831–839
Burlayenko V, Sadowski T (2010) Effective elastic properties of foam-filled honeycomb cores of sandwich panels. Compos Struct 92:2890–2900
Burlayenko V, Sadowski T (2010) Application of homogenization FEM analysis to aluminum honeycomb core filled with polymer foams. Pamm 10:403–404
Burlayenko V, Sadowski T (2009) Analysis of structural performance of aluminum sandwich plates with foam-filled hexagonal honeycomb core. Comp Mater Sci 45:658–662
Grima JN (2010) Hexagonal honeycombs with zero Poisson’s ratios and enhanced stiffness. Adv Eng Mater 9(12):855–862
Grima JN, LODA. (2009) In: Paper presented at the 6th international workshop on auxetics and related systems. Bolton, UK
Davini C, Favata A, Micheletti A, Paroni R (2017) A 2D microstructure with auxetic out-of-plane behavior and non-auxetic in-plane behavior. Smart Mater Struct 26(12)
Timoshenko SP, Goodier JN (1970) Theory of elasticity. J Appl Mech 37(3):888
Minghui F, Outeng X, Yu C (2015) An Overview of Equivalent Parameters of Honeycomb Cores. Materials Review. 5(29):127–134
Sun DQ, Zhang WH (2008) In plane impact properties of aluminum double walled honeycomb cores. J Vib Shock 27(7):69–74
Acknowledgement
The authors would like to acknowledge the financial support from the Agency for Science, Technology and Research under the grant number A1896a0034 entitled “Manufacturing of lightweight free-form shell, sandwich and hybrid cellular structures for aerospace components, manufacturing and repair”.
Funding
This study was funded by the Agency for Science, Technology and Research (grant number A1896a0034).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
See Tables 4 , 5 , 6 , 7 , 8 .
Rights and permissions
About this article

Cite this article
Wu, D., Zhai, W. & Lee, H.P. Equivalent theories and tension properties of semi-reentrant structures. Meccanica 56, 2053–2082 (2021). https://doi.org/10.1007/s11012-021-01345-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-021-01345-z