
Abstract
Many works have been focused on the use of the base isolation to improve the dynamic response of the rigid blocks, avoiding the overturning of these systems. In this paper the effects of a mass damper on the rocking motion of a non-symmetric rigid block, subject to one-sine pulse type excitation, is investigated. The damper is modelled as a pendulum, hinged at the top of the block, with the mass lumped at the end. The equations of rocking motion, the uplift and the impact conditions are derived and the results are obtained by numerical integration of these equations. An extensive parametric analysis is performed, by taking as variable parameters the eccentricity of the centre of mass, the frequency and the amplitude of the excitation and the characteristics of the mass damper. Here the geometrical parameters characterizing the block are taken as fixed quantities, since the main objective of the study is understand if it is possible to find the optimal properties of the pendulum, capable to make more difficult the overturning of the body. The results show that the presence of the mass damper, if correctly designed, leads to a general improvement of the response of the system, since the overturning of the block occurs for values, of the amplitude of the base excitation, higher than those observed where no mass damper is used. Curves providing the optimum value of the characteristics of the mass damper versus the parameters characterizing the excitation, are finally obtained.










Similar content being viewed by others

References
Shenton HW, Jones NP (1991) Base excitation of rigid bodies. I: formulation. J Eng Mech 117(10):2286–2306
Andreaus U (1990) Sliding-uplifting response of rigid blocks to base excitation. Earthq Eng Struct Dyn 19(8):1181–1196
Anooshehpoor A, Heaton TH, Shi B, Brune JN (1999) Estimates of the ground accelerations at Point Reyes Station during the (1906) San Francisco earthquake. Bull Seismol Soc Am 89:845–853
Zhang J, Makris N (2001) Rocking response of free-standing blocks under cycloidal pulses. J Eng Mech 127(5):473–483
Spanos P, Koh A (1984) Rocking of rigid blocks due to harmonic shaking. J Eng Mech 110:1627–1642
Andreaus U, Casini P (1998) Rocking-sliding of a rigid block: friction influence on free motion. Eng Trans 46(2):143–164
Andreaus U, Casini P (1999a) On the rocking-uplifting motion of a rigid block in free and forced motion: influence of sliding and bouncing. Acta Mech 138:1–23
Agbabian MS, Masri FS, Nigbor RL, Ginel WS (1998) Seismic damage mitigation concepts for art objects in museum. In: Proceeding of the 9th world conference on earthquake engineering, Tokyo–Kyoto, Japan, vol 7, pp 235–240
Pompei A, Scalia A, Sumbatyan M (1998) Dynamics of rigid block due to horizontal ground motion. J Eng Mech 124(7):713–717
Taniguchi T (2002) Non-linear response analyses of rectangular rigid bodies subjected to horizontal and vertical ground motion. Earthq Eng Struct Dyn 31:1481–1500
Spanos P, Koh A (1986) Analysis of block random rocking. Soil Dyn Earthq Eng 5:178–183
Caliò I, Marletta M (2003) Passive control of the seismic response of art objects. Eng Struct 25:1009–1018
Boroscheck RL, Romo D (2004) Overturning criteria for non-anchored non-symmetric rigid bodies. In: Proceeding of the 13th world conference on earthquake engineering, Vancouver, Canada
Contento A, Di Egidio A (2009) Investigations into benefits of base isolation for non-symmetric rigid blocks. Earthq Eng Struct Dyn 38:849–866
Shenton HW III (1996) Criteria for initiation of slide, rock, and slide-rock rigid-body modes. J Eng Mech 122(7):690–693
Tung CC (2007) Initiation of motion of a free-standing body to base excitation. Earthq Eng Struct Dyn 36:1431–1439
Purvance MD, Anooshehpoor A, Brune JN (2008) Freestanding block overturning fragilities: numerical simulation and experimental validation. Earthq Eng Struct Dyn 37:791–808
Andreaus U, Casini P (1999b) Dynamics of three rigid block assemblies with unilateral deformable contacts. part 1: contact modelling. Earthq Eng Struct Dyn 28(12):1621–1636
Andreaus U, Casini P (1999c) Dynamics of three rigid block assemblies with unilateral deformable contacts. part 2: sample application. Earthq Eng Struct Dyn 28(12):1637–1649
Vassiliou MF, Makris N (2011) Analysis of the rocking response of rigid blocks standing free on a seismically isolated base. Earthq Eng Struct Dyn 41(2):177–196
Spanos P, Roussis Y, Politis NP (2000) Dynamic analysis of stacked rigid blocks. Soil Dyn Earthq Eng 21:559–758
Andreaus U, Casini P (2003) Dynamic response of mdof mechanical systems with contact and friction. Recent research development. In: Luongo A (ed) Dynamics structural. Research Signpost, Kerala, pp 299–329
Spanos P, Koh A, Roesset J (1986) Harmonic rocking of rigid block on flexible foundation. J Eng Mech 112:1165–1181
Di Egidio A, Contento A (2009) Base isolation of sliding-rocking non-symmetyric rigid blocks subjected to impulsive and seismic excitations. Eng Struct 31:2723–2734
Di Egidio A, Contento A (2010) Seismic response of a non-symmetric rigid block on a constrained oscillating base. Eng Struct 32:3028–3039
Contento A, Di Egidio A (2014) On the use of base isolation for the protection of rigid bodies placed on a multi-storey frame under seismic excitation. Eng Struct 62–63:1
Koh AS, Mustafa G (1990) Free rocking of cylindrical structures. J Eng Mech 116:34–54
Batista M (2006) Steady motion of a rigid disc of finite thickness on a horizontal plane. J Nonlinear Mech 41:850–859
Stefanou I, Vardoulakis I, Mavraganis A (2011) Dynamic motion of a conical frustum over a rough horizontal plane. Int J Nonlinear Mech 46:114–124
Taniguchi T (2004) Rocking behavior of unanchored flat-bottom cylindrical shell tanks under action of horizontal base excitation. Eng Struct 26:415–426
Zulli D, Contento A, Di Egidio A (2012) Three-dimensional model of rigid block with a rectangular base subject to pulse-type excitation. Int J Nonlinear Mech 47:679–687
Di Egidio A, Zulli D, Contento A (2014) Comparison between the seismic response of 2d and 3d models of rigid blocks. Earthq Eng Eng Vib 13:151–162
Di Egidio A, Alaggio R, Contento A, Tursini M, Della Loggia E (2015) Experimental characterization of the overturning of three-dimensional square based rigid block. Int J Nonlinear Mech 69:137–145
Corbi O (2006) Laboratory investigation on sloshing water dampers coupled to rigid blocks with unilateral constraints. Int J Mech Solids 1(1):29–40
Collini L, Garziera R, Riabova K, Munitsyna M, Tasora A (2016) Oscillations control of rocking-block-type buildings by the addition of a tuned pendulum. Shock Vib. doi:10.1155/2016/8570538
Kounadis AN (2010) On the overturning instability of a rectangular rigid block under ground excitation. Open Mech J 4:43–57
Author information
Authors and Affiliations
Appendix: Rocking around the right corner
Appendix: Rocking around the right corner
This section shows the expressions of all the quantities required to define the equations of motion for rocking around the right corner B.
1.1 Equations of motion
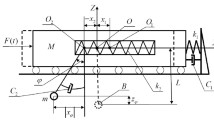
The position of the center of mass M of the rigid body with respect to an inertial reference frame with origin initially coincident with the point B are:
while the position of the center of the mass pendulum m read:
The expression of the kinetic energy of the system reads:
while the expression of the potential energy of the system reads:
The equations of motion are obtained by following the Lagrangian approach:
1.2 Uplift conditions
With reference to Fig. 3, the uplift condition around the right corner B reads:
1.3 Impact conditions
With reference to an impact that happens when the body is rocking around the left corner A and successively re-uplifts around the right corner B, the conservation of the angular momentum evaluated with respect to the right corner B, reads:
where \(J_{B}=J_{G}+R_{BG}^2 M\) is the polar momentum evaluated with respect to the right corner B.
Rights and permissions
About this article

Cite this article
de Leo, A.M., Simoneschi, G., Fabrizio, C. et al. On the use of a pendulum as mass damper to control the rocking motion of a rigid block with fixed characteristics. Meccanica 51, 2727–2740 (2016). https://doi.org/10.1007/s11012-016-0448-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-016-0448-5