
Abstract
The response of multilayered plates with imperfectly bonded interfaces and delaminations to quasi static and dynamic loadings is conveniently studied by assuming the displacements as two length-scales fields, given by global displacements, which are continuous in the thickness, and local perturbations or enrichments, which account for the multilayered structure and the jumps at the interfaces. The a priori imposition of interfacial continuity conditions then leads to a homogenized field defined by the global variables only. The number of displacement unknowns is independent of the number of layers and is equal to five or six, for sliding or mixed mode interfaces, respectively. Dynamic equilibrium equations are derived using variational principles. This effective idea, which was originally proposed in the zigzag theories for fully bonded plates, was first applied to plates with imperfect interfaces by Cheng et al. (J Appl Mech, 63:1019–1026, 1996), Schmidt and Librescu (Nova J Math Game Theory Algebra, 5:131–147, 1996), and Di Sciuva (AIAA J, 35(11):1753–1759, 1997). These pioneering models, as all subsequent models which extend the theories to various problems, suffer from a common omission in the treatment of the interfacial energy in the derivation of the equilibrium equations, which leads to solutions which are accurate only for fully bonded/debonded plates. In this paper a linear, first order model which resolves the inaccuracy and extends the theories to more general interfacial traction laws is presented along with the corrected formulations of the original models. The formulations are validated using exact 2D elasticity solutions for multilayered plates in cylindrical bending.








Similar content being viewed by others


References
Camacho G, Ortiz M (1966) Computational modeling of impact damage in brittle materials. Int J Solids Struct 33:2899–2938
Zou Z, Reid SR, Soden PD, Li S (2001) Mode separation of energy release rate for delamination in composite laminates using sublaminates. Int J Solids Struct 38:2597–2613
Li W, Siegmund T (2002) An analysis of crack growth in thin-sheet metal via a cohesive zone model. Eng Fract Mech 69(18):2073–2093
Cirak F, Ortiz M, Pandolfi A (2005) A cohesive approach to thin-shell fracture and fragmentation. Comput Methods Appl Mech Eng 194(21–24):2604–2618
Andrews MG, Massabò R, Cavicchi A, Cox BN (2009) Dynamic interaction effects of multiple delaminations in plates subject to cylindrical bending. Int J Solids Struct 46:1815–1833
Andrews MG, Massabò R, Cox BN (2006) Elastic interaction of multiple delaminations in plates subject to cylindrical bending. Int J Solids Struct 43(5):855–886
Massabò R, Cavicchi A (2012) Interaction effects of multiple damage mechanisms in composite sandwich beams subjected to time dependent loading. Int J Solids Struct 49(2012):720–738
Lundsgaard-Larsen C, Massabò R, Cox BN (2012) On acquiring data for large-scale crack bridging at high strain rates. J Compos Mater 46(8):949–971
Massabò R, Campi F (2013) Delamination damage in laminated shells. In: 19th International conference on composite materials, ICCM19, Montreal, 1–10 July 2013, ISBN 9781629931999
Massabò R, Campi F (2013) Modeling laminated composites with cohesive interfaces: a homogenization approach. In: Proceedings of the XXI congress of the Italian association of theoretical and applied mechanics, AIMETA 2013, Torino, 1–10 Sep 2013, ISBN 978-88-8239-183-6
Massabò R (2013) A homogenized model for progressive delamination of laminated structures with cohesive interfaces loaded dynamically. In: Marine Composites and Sandwich Structures, Proceedings of the US O.N.R. meeting of the Solid Mechanics Program, Arlington, 87–98.
Di Sciuva M (1986) Bending, vibration and buckling of simply supported thick multilayered orthotropic plates: an evaluation of a new displacement model. J Sound Vibrations 105(3):425–442
Di Sciuva M (1987) An improved shear-deformation theory for moderately thick multilayered anisotropic shells and plates. J Appl Mech 54:589–596
Cheng ZQ, Jemah AK, Williams FW (1996) Theory for multilayered anisotropic plates with weakened interfaces. J Appl Mech 63:1019–1026
Schmidt R, Librescu L (1996) Geometrically nonlinear theory of laminated anisotropic composite plates featuring interlayer slips. N J Math Game Theory Algebr 5:131–147
Di Sciuva M (1997) Geometrically nonlinear theory of multilayered plates with interlayer slips. AIAA J 35(11):1753–1759
Librescu L, Schmidt R (2001) A general theory of laminated composite shells featuring interlaminar bonding imperfections. Int J Solids Struct 38(19):3355–3375
Cheng ZQ, Kennedy D, Williams FW (1996) Effect of interfacial imperfection on buckling and bending behavior of composite laminates. AIAA J 34(12):2590–2595
Cheng ZQ, Kitipornchai S (1998) Nonlinear theory for composite laminated shells with interfacial damage. J Appl Mech 65:711–718
Cheng ZQ, Kitipornchai S (2000) Prestressed composite laminates featuring interlaminar imperfection. Int J Mech Sci 37:2127–2150
Cheng ZQ, He LH, Kitipornchai S (2000) Influence of imperfect interfaces on bending and vibration of laminated composite shells. Int J Solids Struct 42(3):425–443
Cheng ZQ, Batra RC (2001) Thermal effects on laminated composite shells containing interfacial imperfections. Compos Struct 52:3–11
Di Sciuva M, Icardi U, Librescu L (1999) Effects of interfacial damage on the global and local static response of cross-ply laminates. Int J Fract 96:17–35
Schmidt R, Librescu L (1999) A general theory of geometrically imperfect laminated composite shells featuring damaged bonding interface. Q J Mech Appl Math 25(1):1–19
Di Sciuva M, Gherlone M, Librescu L (2002) Implications of damaged interfaces and of other non-classical effects on the load carrying capacity of multilayered composite shallow shells. Int J Non-linear Mech 37:851–867
Di Sciuva M, Librescu L (2001) Contribution to the nonlinear theory of multilayered composite shells featuring damaged interfaces. Compos Part B 32(3):219–227
Icardi U (1999) Free vibration of composite beams featuring interlaminar bonding imperfections and exposed to thermomechanical loading. Compos Struct 46(3):229–243
Icardi U, Di Sciuva M, Librescu L (2000) Dynamic response of adaptive cross-ply cantilevers featuring interlaminar bonding imperfections. AIAA J 38(3):499–506
Chen WQ, Cai JB, Ye GR (2003) Exact solutions of cross-ply laminates with bonding imperfections. AIAA J 41(11):2244–2250
Chen WQ, Wang YF, Cai JB, Ye GR (2004) Three-dimensional analysis of cross-ply laminated cylindrical panels with weak interfaces. Int J Solids Struct 41:2429–2446
Chen WQ, Jung JP, Lee KY (2006) Static and dynamic behavior of simply supported cross-ply laminated piezoelectric cylindrical panels with imperfect bonding. Compos Struct 74:265–276
Bui VQ, Marechal E, Nguyen-Dang H (1999) Imperfect interlaminar interfaces in laminated composites: bending, buckling and transient reponses. Compos Sci Technol 59:2269–2277
Pagano NJ (1969) Exact solutions for composite laminates in cylindrical bending. J Compos Mater 3:398–411
Williams TO, Addessio FL (1997) A general theory for laminated plates with delaminations. Int J Solids Struct 34:2003–2024
Massabò R, Mumm D, Cox BN (1998) Characterizing mode II delamination cracks in stitched composites. Int J Fract 92(1):1–38
Soldatos KP, Shu X (2001) Modelling of perfectly and weakly bonded laminated plates and shallow shells. Compos Sci Technol 61(2):247–260
Bert CW (1973) Simplified analysis of static shear factors for beams of nonhomogeneous cross section. J Compos Mater 3:525
Di Sciuva M, Gherlone M (2003) A global/local third order Hermitian displacement field with damaged and transverse extensibility: FEM formulation. Compos Struct 4:433–444
Gherlone M, Di Sciuva M (2007) Thermomechanics of undamaged and damaged miltilayered composite plates: a sub-laminate finite element approach. Compos Struct 81:125–136
Tessler A, Di Sciuva M, Gherlone M (2009) A refined zigzag beam theory for composite and sandwich beams. J Compos Mater 43(9):1051–1081
Massabò R, Campi F (2014) An efficient approach for multilayered beams and wide plates with imperfect interfaces and delaminations. Compos Struct 116:311–324
Di Sciuva M, Icardi U (1993) Discrete-layer models for multilayered shells accounting for interlayer continuity. Meccanica 28(4):281–291
Kardomateas GA, Phan CN (2011) Three-dimensional elasticity solution for sandwich beams/wide plates with orthotropic phases: the negative discriminant case. Sandw Struct Mater 13(6):641–661
Acknowledgements
This work was supported by U.S. Office of Naval Research, No. N00014-05-1-0098 and No. N00014-14-1-0229, administered by Dr. Y.D.S. Rajapakse, and Italian MIUR, Prin09 No. 2009XWLFKW.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
Consider the schematic shown in Fig. 9, which represents a 1D element of thickness h and unit cross-sectional area, subjected to uniform traction F 3, in series with a 1D spring of stiffness K N .

Schematic of a 1D element in series with a 1D spring, used to verify the validity of the proposed approach
The spring defines a zero thickness interface between the external constraint and the 1D element. In accordance with the theory proposed in this paper, Eq. (4), the displacement field in the element is assumed as:
where φ 3 is the constant axial strain in the bar ɛ 33 = w,3 = φ 3, Eq. (5), which is related to the axial stress by σ 33 = E 3 φ 3, Eq. (6b), with E 3 the Young modulus. The traction at the interface with unit positive normal vector n is given by the spring reaction \( \hat{\sigma }_{33} = K_{N} \hat{w} \), Eq. (2). The interfacial relative displacement, \( \hat{w} \), is obtained by imposing \( \hat{\sigma }_{33} = \sigma_{33} n_{3} \), which yields \( \hat{w} = {{\varphi_{3} E_{3} } \mathord{\left/ {\vphantom {{\varphi_{3} E_{3} } {K_{N} }}} \right. \kern-0pt} {K_{N} }} \), Eq. (10b). The homogenized displacement, Eq. (13), then becomes:
and depends on the global variable φ 3 only.
Direct imposition of equilibrium conditions at the upper surface of the element at x 3 = h, F 3 = σ 33 n 3, yields
The equilibrium equation can also be found particularizing to this problem the principle of virtual works, Eq. (16):

where the term with the line on top accounts for the strain energy of the spring. This term was erroneously omitted in the original models formulated in [14–17]. Substitution of virtual strains and displacements, leads to:

which yields the equilibrium equation in terms of stresses, Eqs. (17):

and in terms of homogenized displacements:

The terms in brackets in the equation above cancel and the equation coincides with that obtained by imposing direct equilibrium, Eq. (38). In the absence of the term with the line on top in the principle of virtual works, Eq. (39), the terms in brackets would not cancel and equilibrium won’t be satisfied.
Appendix 2: Revision and correction of original models. Cheng, Jemah and Williams’s model (1996) [14] revised
Cheng et al. formulated in [14] a pioneering model which extends to plates with imperfect, sliding interfaces the homogenized approach of the zigzag theories originally formulated for perfectly bonded plates. An efficient linear, third order theory was proposed which is revised and corrected here.
2.1 Displacement field (Eqs. 13a, b in [14])
with \( H ( {x_{3} - {}^{( m )}h} ) = \{ {1{\text{ for }}( {x_{3} - {}^{( m )}h} ) \ge 0; \, 0 \;{\text{for }}( {x_{3} - {}^{( m )}h} ) < 0} \} \), (m)Δv α the jump at the (m)Ω interface and (m) u α the mth zigzag function.
2.2 Interfacial tractions law (Eq. 6 in [14])
with \( {\mathbf{R}} \) the compliance tensor of the spring layer interface and \( {\mathbf{n}} \) the unit positive normal vector of the interface.
2.3 Stress and strain components (Eqs.14,15 in [14])
where negligible normal tractions have been assumed in the thickness direction.
2.4 Compatibility of transverse shear strains on bounding surfaces (Eqs. 16 in [14])
2.5 Continuity conditions on transverse shear tractions at interfaces (Eq. 17, 18 in [14])
from which:
where the (i) a αλ are constants to be derived using the previous equation.
2.6 Homogenized displacement jumps (Eq. 22 in [14])
where
2.7 Homogenized displacement field (Eq. 23, 24 in [14])
where
2.8 Hamilton equation (Eq. 25 [14] revised)

(Note terms with line on top correct original equations).
2.9 Dynamic equilibrium equations (Eqs. 26 [14] revised)

where

(Note terms with line on top correct original equations).
2.10 Boundary conditions (Eqs. 27 [14])
where N αβ , M αβ , P αβ and R λ are given in Eqs. (28, 29) in Cheng et al. [14]; I, J, K, I αβ , J αβ , K λβ in Eqs. (30, 31).
Appendix 3: Revision and correction of original models. Schmidt and Librescu’s model (1996, 1999, 2001) [15, 17, 24] revised
Schmidt and Librescu proposed different models for plates and shells with interlaminar bonding imperfection based on the derivation of a homogenized displacement field with a reduced number of unknowns. The models were formulated for geometrically nonlinear multilayered plates [15] and shells [24], using a first order shear approximation and assuming sliding only interfaces, and for linear multilayered shells with mixed-mode interfaces [17]. A revised formulation is presented here for the linear model proposed in [17]; the equations will be derived for the special case of shallow shell or flat plate, sliding only interfaces (mixed mode interfaces can be treated using the model presented in this paper) and zero body forces. The terminology used in [17] will be maintained, including vectors and tensors components, but for the differentiations which will be given as regular partial differentiations as allowed by the particularization to a flat plate presented here.
3.1 Displacement field (Eqs. 19a, b in [17])
with \( Y ( {x^{3} - {}^{ ( l )}Z^{ + } } ) = \{ {1{{ for }}( {x^{3} - {}^{( l )}Z^{ + } } ) \ge 0; \, 0{\text{ for }} ( {x^{3} - {}^{ ( l )}Z^{ + } } ) < 0} \} \)
3.2 Interfacial tractions law (Eqs. 15a, 16a, 17a in [17])
3.3 Transverse shear and normal strain components (Eqs. 20, 22, 21a, 21b, 23a in [17])
with:
3.4 Transverse shear stress (Eqs. 33a in [17])
where E β3α3 are components of the elastic tensor.
3.5 Omega functions (Eqs. 40, 35b in [17])
with:
where F β3α3 are components of the compliance tensor.
3.6 Displacement jumps (Eqs. 43, 45a in [17])
where:
3.7 Homogenized displacement field
3.8 Homogenized strain components
3.9 Hamilton equation (Eqs. 48 [17] revised)

(Note terms with line on top correct original equations).
3.10 Dynamic equilibrium equations (Eqs. 50a, b, c [17] revised)

where

(Note terms with line on top correct original equations).
where \( \mathop {L^{\alpha \beta } }\limits^{0} \) , Q β3, \( \, \mathop {L^{\alpha \beta } }\limits^{1} \) are given in Eqs. (51a, b, c), (A1), (A2) in Librescu and Schmidt [17]; \( \mathop {p^{\alpha } }\limits^{0} ,\;\mathop {p^{3} }\limits^{0} ,\;\mathop {p^{\alpha } }\limits^{1} \) in Eqs. (52a, b, c); \( \mathop {I^{\alpha } }\limits^{0} ,\;\mathop {I^{3} }\limits^{0} ,\;\mathop {I^{\alpha } }\limits^{1} \) in Eqs. (53a–c) as explained.
3.11 Static boundary conditions (Eqs. 56a–h [17] revised)

where

and \( {\varvec{\tau}} \) and \( {\varvec{\upnu}} \) are unit tangent and outward normal vectors along the boundary curve of the plate; \( \mathop {{\mathop{L}\limits_{\sim}}^{\alpha \beta } }\limits^{0} \), \( \mathop {{\mathop{L}\limits_{\sim}}^{\alpha \beta } }\limits^{1} \), \( \mathop {{\mathop{Q}\limits_{\sim}}^{\alpha 3} }\limits^{0} \), \( {\mathop{P}\limits_{\sim}}^{\alpha } \) and \({\mathop{K}\limits_{\sim}}^{\alpha \beta } \) are given in Appendix B of [17].
Appendix 4: Revision and correction of original models. Di Sciuva model (1997) [16] revised
Di Sciuva formulated in [16] a general theory for geometrically nonlinear plates featuring interlayer slips where no a priori assumption is made on the order of the thickness expansion of the in-plane displacements. The theory is a development of the results obtained by the author in [12, 13] for multilayered fully bonded plates and for fully bonded shells in [42]. The linearized version of the theory is revised and corrected here.
4.1 Displacement field (Eqs. 7–10 in [16])
where
with \( H_{k} = H ( {x_{3} - {}^{ ( k )}Z^{ + } } ) = \{ {1{\text{ for }} ( {x_{3} - {}^{ ( k )}Z^{ + } } ) \ge 0; \, 0{\text{ for }} ( {x_{3} - {}^{ ( k )}Z^{ + } } ) < 0} \} \), \( {}^{(k)}\hat{U}_{\alpha } (x_{\beta } ) \) the jump at the interface with x 3 = (k) Z + and (k) ϕ α (x β ) the kth zigzag function.
4.2 Interfacial tractions law (Eq. 22 in [16])
with \( {\mathbf{T}} \) the compliance tensor of the spring layer interface.
4.3 Stress and strain components (linearized problem) (Eqs. 2, 3 in [16])
where negligible normal tractions are assumed in the thickness direction and Q αβγδ are the transformed reduced components of the stiffness tensor.
4.4 Zigzag functions from continuity on transverse shear tractions at interfaces (Eqs. 12–15 in [16])
where:
(the last equation corrects a wrong sign in Eq. (15) in [16]).
4.5 Homogenized displacement jumps (Eqs. 23, 19, 20 in [16])
where:
4.6 Homogenized displacement field (Eqs. 24, 25, 26 in [16])
where
4.7 Principle of virtual displacements equation (Eq. 29 [16] revised)

(Note terms with line on top correct original equations).
4.8 Dynamic equilibrium equations (Eqs. 37, 38 [16] revised)

(Note terms with line on top correct original equations).
4.9 Static boundary conditions (Eqs. 49b, 50b, 51b [16] revised)

where \( \hat{S}_{\alpha \gamma }^{(s)} \) and \( \hat{M}_{\alpha \gamma } \) are given in Eq. (33) in [16], \( \hat{V}_{3} \) in Eq. (31), T γ , Q γ and T (r) γ in Eq. (34), m (i), \( \hat{m}_{\gamma \beta }^{{}} \), \( \hat{m}_{\gamma \beta }^{(r)} \), \( \hat{m}_{\gamma \beta }^{(r,s)} \) in Eq. (35) and \( \overline{{\hat{S}_{\gamma n}^{(r)} }} \), \( \overline{\hat{M}}_{\gamma n} \) and \( \overline{V}_{3} \) in Eq. (36).
Appendix 5: Equilibrium equations and boundary conditions in multilayered plates with sliding interfaces, subjected to transverse loading and deforming in cylindrical bending
Equilibrium equations in terms of generalized displacements:


where:
Mechanical boundary conditions in terms of displacements:


In the definition of the equations above, the transverse shear resultant, Eq. (28a), and strain, Eq. (15b), have been related through \( Q_{{\text{2}}} = K^{{\text{2}}} C_{{23}}^{P} \left( {w_{{0,{\text{2}}}} + \varphi _{{\text{2}}} } \right) \), where \( \left( {w_{{0,2}} + \varphi _{2} } \right) = 2\varepsilon _{{23}} (1 + \sum\limits_{{i = 1}}^{{k - 1}} {\Lambda _{{22}}^{{\left( {1;i} \right)}} } )^{{ - 1}},\; C^{P}_{23} \) is the shear stiffness given in Eq. (88) and K 2 is a shear correction factor, which is needed in this first order theory to properly account for the contribution of the shear deformations to the displacement field, as a consequence of the approximation in the distribution of the shear stresses in the thickness. In a unidirectionally reinforced, perfectly bonded plate, C P23 = C 2323 h with C 2323 the transverse shear modulus, Q 2 = σ 23 h, and K 2 is that appropriate for a single-layer plate, i.e. K 2 = 5/6. In a perfectly bonded, multilayered plate, K 2 becomes a problem dependent parameter (e.g. [37]); in [12] it was shown that, for simply supported plates with common layups and geometrical/loading conditions, the homogenized theory with K 2 = 1 leads to accurate predictions of the displacement field. In a plate with imperfect interfaces, the difference between the transverse shear strain, 2ɛ 23, and the generalized shear strain, 2ɛ 23g , introduced in Sect. 6, which is the actual measure of the shear deformations in the plate, can be very large, especially in thick plates with very compliant interfaces. The transverse displacements of the plates, obtained through the solution of the system of differential equations (84)–(86), which depend on 2ɛ 23 only, are then underestimated. To overcome this problem, we are currently working on a modification of the shear factor that could be made dependent on the interfacial properties. Work on this problem is in progress and the results presented in Sect. 8 refer to K 2 = 5/6 (unidirectionally reinforced plate) and K 2 = 1 (multilayered plate).
Appendix 6: Extension of Pagano’s model [33] to plates with linearly elastic interfaces
The exact 2D elasticity solution for a multilayered plate with perfectly bonded interfaces deforming in cylindrical bending was obtained by Pagano in [33]. Pagano’s approach was extended to model multilayered plates with linearly elastic interfaces in [34]. The strategy proposed in [34] is briefly recalled here.
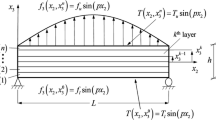
The solution refers to plates of length L with linearly elastic interfaces, subjected to a quasi-static transverse load q = q 0 sin (πx 2/L), simply supported at the edges at x 2 = 0 and x 2 = L and deforming in cylindrical bending (Fig. 3). A system of local axes of material symmetry (k) x 2 and (k) x 3 is introduced with the origin at the kth layer mid-plane and the axis (k) x 2 longitudinal and parallel to the global mid-plane longitudinal axis x 2. The solution is based on a stress function approach, where the stress function for the kth layer is:
which is related to the stress components by:
Compatibility and constitutive equations (\( {}^{(k)}{\varvec{\upvarepsilon}} \, = \, {}^{(k)}{\tilde{\mathbf{A}}}{}^{(k)}{\varvec{\upsigma}} \)) yield the fourth order ordinary differential equation :
where the tilde indicates compliance coefficients which account for plane strain conditions parallel to the plane (k) x 2-(k) x 3. The general solution for an orthotropic layer is:
where the c jk are constants, provided the m jk are all distinct. The m jk are functions of the compliance coefficients [33], \( m_{1k} ,m_{2k} = \pm {\raise0.7ex\hbox{$\pi $} \!\mathord{\left/ {\vphantom {\pi L}}\right.\kern-0pt} \!\lower0.7ex\hbox{$L$}}\sqrt {{{(a_{k} + b_{k} )} \mathord{\left/ {\vphantom {{(a_{k} + b_{k} )} {c_{k} }}} \right. \kern-0pt} {c_{k} }}} \) and \( m_{3k} ,m_{4k} = \pm {\raise0.7ex\hbox{$\pi $} \!\mathord{\left/ {\vphantom {\pi L}}\right.\kern-0pt} \!\lower0.7ex\hbox{$L$}}\sqrt {{{(a_{k} - b_{k} )} \mathord{\left/ {\vphantom {{(a_{k} - b_{k} )} {c_{k} }}} \right. \kern-0pt} {c_{k} }}} \), with \( a_{k} = {}^{(k)}\tilde{A}_{55} + 2{}^{(k)}\tilde{A}_{23} \), \( b_{k} = \sqrt {a_{k}^{2} - 4{}^{(k)}\tilde{A}_{22} {}^{(k)}\tilde{A}_{33} } \) and \( c_{k} = 2{}^{(k)}\tilde{A}_{22} \). If a k > b k and \( a_{k}^{2} > 4{}^{(k)}\tilde{A}_{22} {}^{(k)}\tilde{A}_{33} \), then the m jk are all real and distinct and the c jk are all real. For materials that do not satisfy the above condition, the solution for a fully bonded plate is given in [43]. The displacement field is:
The boundary conditions at the plate ends are identically satisfied by the functions (94) and (97). The 4 × n arbitrary constants in Eq. (96) are determined by imposing the remaining boundary conditions at the upper and lower surfaces of the plate, continuity conditions at the interfaces between layers and the constitutive laws of the interfaces:
where the global coordinate x k3 defines the interface k between the layers k and k + 1.
Rights and permissions
About this article

Cite this article
Massabò, R., Campi, F. Assessment and correction of theories for multilayered plates with imperfect interfaces. Meccanica 50, 1045–1071 (2015). https://doi.org/10.1007/s11012-014-9994-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-014-9994-x