
Abstract
We consider the random motion of a particle that moves with constant velocity in \(\mathbb {R}^3\). The particle can move along four different directions that are attained cyclically. It follows that the support of the stochastic process describing the particle’s position at a fixed time is a tetrahedron. We assume that the sequence of sojourn times along each direction follows a Geometric Counting Process (GCP). When the initial condition is fixed, we obtain the explicit form of the probability law of the process, for the particle’s position. We also investigate the limiting behavior of the related probability density when the intensities of the four GCPs tend to infinity. Furthermore, we show that the process does not admit a stationary density. Finally, we introduce the first-passage-time problem for the first component of the process through a constant positive boundary providing the bases for future developments.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the last decades, finite-velocity random motions have been widely studied as a natural class of stochastic processes to model real phenomena on multi-dimensional Euclidean spaces. In the one-dimensional case, the model that describe these motions is the telegraph process, in which the changes of the two possible velocities are governed by the Poisson process. The classical case has been studied in Orsingher (1990) where the author derives the explicit form of the probability law of a random motion governed by the telegraph equation in terms of the Bessel function. Differently, in Beghin et al. (2001) the authors examine the telegraph process with drift; its distribution was obtained by means of the Lorentz transformation. Another interesting study of a one-dimensional telegraph process is presented in Stadje and Zacks (2004) where the particle moves at constant velocity between Poisson times such that new velocities are chosen randomly. Later, the study of random motions in two or more dimensions has been performed by many authors over the years. In particular, finite-velocity planar random processes in continuous time have been investigated by Orsingher (1986) and Masoliver et al. (1993). A general model of one-dimensional random evolution with n velocities (\(n \ge 2\)), switching according to a Poisson process, is studied in Kolesnik (1998). An overview of telegraph processes and their multidimensional counterparts is given in Kolesnik and Ratanov (2023). Further investigations have been oriented to investigate the distribution for Markovian random motion in the plane (cf. Kolesnik and Turbin (1998) and Kolesnik (2006)), and the random motion with possible reflections at Poisson-paced events (cf. Kolesnik and Orsingher (2002)). The analysis of these random motions with finite direction is performed analytically by solving partial differential equations. Other methods use probabilistic approaches based on order statistics, or on more general renewal processes as in Di Crescenzo (2002) (with arbitrary random steps between successive switches) where the author obtains the probability law of the two-dimensional stochastic process by means of a modified two-index Bessel function.
Several generalizations of the basic model to multi-dimensional space have been proposed especially in biology and physics, motivated by the need of describing a variety of random motions performed by cells, micro-organisms and animals. These problems have been analyzed in Stadje (1987) to model the moving of micro-organisms on surfaces, in Martens et al. (2012), Hartmann et al. (2020) and Santra et al. (2020) to examine run-and-tumble processes for describing the bacterial motility, and in Pogorui and Rodríguez-Dagnino (2021) to study the properties of an ideal gas.
The main aim for the study of finite-velocity random motions in one or more dimensions is the determination of the probability distribution of the position vector \(\varvec{X}(t)\) of a particle at time t. For instance, cyclic planar motions with three and four directions have been treated by Orsingher (2002) and Orsingher and Sommella (2004) in which the changes of direction are governed by a homogeneous Poisson process. Moreover, the authors have found a connection between the equations governing the probability distributions and the Bessel functions of higher order. The probability law of the motion of a particle performing a cyclic random motion is determined in Lachal (2006) where the particle can take a finite number of possible directions with different directions. Here, the changes of direction occur at Poisson random times. For instance, see also Lachal et al. (2006) in which the probability distribution is obtained by using order statistics and is expressed in terms of hyper-Bessel functions of higher order. Recently, planar random motions with orthogonal directions switching at Poisson time have been examined in Orsingher et al. (2020), Cinque and Orsingher (2023) and Cinque and Orsingher (2023). Other remarkable results concerning random motions in multidimensional spaces in inhomogeneous and semi-Markov media are illustrated in Orsingher and De Gregorio (2007) and Pogorui (2012). The case in which the direction alternations occur at the renewal epochs of a K-Erlang distribution is presented in Pogorui and Rodríguez-Dagnino (2011). Moreover, De Gregorio (2012) analyzes a spherically asymmetric random motion in the real space \(\mathbb {R}^d\), \(d\ge 2\), where the directions are non-uniformly distributed.
Some modified versions of the telegraph process have been considered also by substituting the underlying Poisson process with different kinds of counting processes. For instance, in Di Crescenzo et al. (2023) the authors study a stochastic process which describes the dynamics of a particle performing a finite-velocity random motion in \(\mathbb {R}\) and \(\mathbb {R}^2\), that alternates cyclically along two and three different directions, respectively, with possibly unequal velocities. The novelty of this last paper is that the number of displacements of the motion along each possible direction follows a Geometric Counting Process (GCP) (see Cha and Finkelstein (2013)). This new approach has the advantageous characteristic that consists in the possibility of describing phenomena whose interarrival times have heavy tails rather than the memoryless property, as observed often in real cases. Specifically, the properties of the interarrival times GCP’s are declined in several areas, such as in software reliability or actuarial theory, where such counting processes are often considered to describe occurrences of shocks or claims, and in earth sciences (climatology, hydrology, etc) to model the failures along times. For instance, some examples of applied fields where GCPs can be used are discussed in Section 6 and 7 of Di Crescenzo and Pellerey (2019).
Therefore, starting from the results obtained in Di Crescenzo et al. (2023), here, we propose an extension of the classical telegraph process in \(\mathbb {R}^3\) with the aim of (i) determining the explicit general laws of the distribution of the current position, and (ii) presenting an approach of resolution based on the study of the intertimes between consecutive changes of direction. In particular, we assume that the motion proceeds along four directions that alternate cyclically, where the intertimes between two subsequent changes toward each direction are distributed as a GCP. Specifically, the motion of the particle is formed by continuous straight lines that change directions at each epoch of the GCP. The sequence of attained directions is cyclic in the sense that at each event the particle switches from direction \(\vec {v}_j\) to \(\vec {v}_{j+1}\), for \(1 \le j \le 4\), with \(\vec {v}_{4}=\vec {v}_{0}\) and, in general, \(\vec {v}_{4k+j}=\vec {v}_{j}\), for \(k \in \mathbb {N}\). Moreover, differently from the strategy illustrated in Lachal (2006) and Lachal et al. (2006), we consider the spherical coordinates to represent the possible directions and the support of the cyclic random motion in \(\mathbb {R}^3\). This approach allows us to obtain the explicit expression of the probability law of the process. The use of a limited number of directions is justified by the results presented in Orsingher and Sommella (2004) where the authors consider a cyclic random motion with four directions forming a regular tetrahedron in \(\mathbb {R}^3\) but where the changes of direction are governed by a homogeneous Poisson process. Precisely, in our case the intertimes possess a heavy-tailed distribution, differently to the classical telegraph process in which the times between direction changes have exponential distribution. The scheme of the present paper is useful in describing suitable dynamics where random occurrences between two events have infinite expectations, and are dependent. Thus, the proposed stochastic process provides new models for the description of phenomena that are no more governed by hyperbolic PDE’s as the classical telegraph equation. Another benefit of the present study is the construction of new solvable models, whose probability laws are obtained in tractable and closed form (as in the special case with symmetry) using an approach based on the analysis of the intertimes between consecutive direction changes. Note that the introduction of these finite-velocity random motions is also useful to describe the movement of a particle that chooses the new direction among all the possible ones in a cyclical manner.
Moreover, a further strength of this work concerns some interesting asymptotic results. In particular, we are able to obtain the limiting density of the process in a closed form when the parameters of the intertimes between direction changes tend to infinity. In addition, we show that the process does not admit a stationary density as t goes to \(+\infty\). All these motivations allow us to study the motion in \(\mathbb {R}^3\) because it can be applied to various situations and, moreover, the amount of calculations needed is quite acceptable. In this framework we recall the recent books by Pogorui et al. (2021) and Pogorui et al. (2021), where a variety of applications of random motions in Markov and semi-Markov random environments have been considered. For instance, results and closed-form expressions for one-dimensional and multidimensional random motions, also in the presence of different types of boundaries, are presented for applications to the reliability of storage systems, as well as to model stock price dynamics and other issues of interest in mathematical finance.
In detail, we analyze the process \(\{(\varvec{X}(t),V(t)), t \ge 0 \}\) in \(\mathbb {R}^3\) which describes the position of randomly moving particle performing a cyclic alternating motion with four specific and possible different directions \(\vec {v}_j\), for \(1 \le j \le 4\). The direction-vectors form a (possibly irregular) tetrahedron, say \(\mathcal {T}(t)\), i.e., the set of all possible positions of the moving particle at time \(t >0\) on the surface of the support in \(\mathbb {R}^3\). Note that the analysis of random motions in multidimensional Euclidean spaces is quite rare in the literature, since its analysis is rather difficult. Hence, to overcome the difficulties of the study we will refer in detail to the simpler case in which the region \(\mathcal{T}(t)\) is regular and centered in the origin. Once defined the geometry of the region \(\mathcal {T}(t)\), the probability law of the process is determined when (i) the initial components are given by three terms, describing the situations in which the particle is found on the vertices, edges and faces of \(\mathcal {T}(t )\), at the beginning of its motion, and (ii) the density concerning the absolutely continuous part is related to the motion of the particle in the interior of \(\mathcal {T}(t)\). In particular, for the latter absolutely continuous component we exhibit an integral representation involving the probability density functions and the conditional survival function of the intertimes between two successive events.
This is the plan of the paper. In Section 2 we introduce the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) describing the position of a particle performing a cyclic, minimal, random motion in \(\mathbb {R}^3\) with four possible directions \(\vec {v}_j\), for \(1 \le j \le 4\), and constant velocity \(c>0\). Some preliminary results on the GCP are also briefly illustrated with reference to the distribution of the intertimes between two consecutive events. Then, in Section 3, we study the direction vectors and the analytic representation of the support in \(\mathbb {R}^3\) identifying the tetrahedron \(\mathcal {T}(t)\). In Section 4 we investigate the stochastic process and its probability laws with underlying GCP, and determine the explicit expression of the initial and absolutely continuous components. Section 5 illustrates a special case with four fixed cyclic directions forming a regular tetrahedron in \(\mathbb {R}^3\). Moreover, we examine the limiting distribution of the process when the parameters of the intertimes tend to infinity and when the time t goes to infinity. Finally, in Section 6 we provide some basic lines for the study of the first-passage-time problem of the first component of the process through a constant positive boundary \(\beta >0\).
2 A Random Motion in \(\mathbb {R}^3\) with Cyclic Directions
Let \(\varvec{X}(t) = (X_1(t), X_2(t), X_3(t))\) and V(t) be respectively the position and the direction of the particle at an arbitrary time \(t \ge 0\) in the space \(\mathbb {R}^3\). Assume that each point in \(\mathbb {R}^3\) is represented by a triple \(\varvec{x}=(x_1,x_2, x_3)\). We consider a cyclic random motion \(\{(\varvec{X}(t),V(t)), t \ge 0 \}\) performed by a particle which can take four possible directions \(\vec {v}_j\), for \(1 \le j \le 4\), and moves with constant velocity \(c > 0\) through out the motion. The motion is cyclic which means that at each event the particle changes from direction \(\vec {v}_j\) to \(\vec {v}_{j+1}\), for \(j=1,2,3\), and then from \(\vec {v}_4\) to \(\vec {v}_1\), and so on. Let \(D_{j,k}\) be the random duration of the k-th time interval during which the motion proceeds with velocity c. For any \(1 \le j \le 4\), the set \(D_{j,\cdot }:=\{D_{j,k}, k \in \mathbb {N}\}\) constitutes a sequence of non-negative and dependent absolutely continuous random variables such that
Moreover, the sets \(D_{j,\cdot }\), for \(1 \le j\le 4\), are mutually independent.
Now, let \(\{ N(t), t \ge 0 \}\) be the alternating counting process having arrival times \(T_1, T_2, \ldots\) (i.e., the instants when the events occur), such that N(t) counts the total number of direction reversals of the particle in [0, t], i.e.
In order to obtain the probability law of the stochastic process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) introduced so far, we consider the stochastic equations for the position \(\varvec{X}(t)\) and the direction V(t) of the particle at time \(t\ge 0\). Specifically, we have
with \(V (0) \in \{\vec {v}_1,\vec {v}_2,\vec {v}_3,\vec {v}_4\}\), and
with \(\varvec{X}(0)=\varvec{0} \equiv (0,0,0)\) and \(\sum _{k=1}^{N(t)-1}(T_k-T_{k-1})=T_{N(t)-1}\), since \(T_0=0\). The sum in Eq. (3) refers to the case where at least one change of direction has occurred before t, while the last term is related to the displacement along the current direction at time t.
We indicate with \(T_{k}\) the k-th random instant in which the motion modifies its direction, for \(n \in \mathbb {N}_{0}\). Remembering Eq. (1) the following identity holds:
where, for fixed \(j \in \{1,2,3,4\}\), \(M=\big (m_{j,r}\big )_{1\le r \le 4} \in \mathbb {R}^{4 \times 4}\) is equal to
The relations obtained above will be used in Section 4 to study the probability law of the process \(\{(\varvec{X}(t),V(t)), t \ge 0 \}\).
2.1 The Distribution of the Intertimes as a Geometric Counting Process
We introduce some preliminary results on the GCP (for more details, see Cha and Finkelstein (2013) and Di Crescenzo and Pellerey (2019)). Specifically, we assume that the random intertimes between consecutive changes of directions are governed by possible different GCPs (see, for instance, Di Crescenzo et al. (2023)).
For this purpose, we consider a mixed Poisson process \(\{N(t), t \ge 0\}\) characterized by the following marginal distribution expressed as a mixture:
where \(\{N^{(\alpha )}(t)\), \(t \ge 0\}\) is a Poisson process with intensity \(\alpha\) and U is an exponential distribution with support \(\mathbb {R}^+\). Here, we consider the special case when \(U(\cdot ) = U_{\lambda }(\cdot )\) is an exponential distribution with mean \(\lambda \in \mathbb {R}^{+}\). Therefore, we refer to the process N(t) as a GCP with intensity \(\lambda\), according to Cha and Finkelstein (2013), where the authors studied dependence properties of its increments in the general case of non-constant intensities. The probability distribution of the process N(t) satisfies the following properties:
-
at time \(t = 0\), one has \(N(0) = 0\),
-
for all \(s,t \ge 0\) and \(k \in \mathbb {N}_{0}\) it holds:
$$\begin{aligned} \mathbb {P}\{N(t+s)-N(t)=k\}= \dfrac{1}{1+\lambda s} \bigg ( \dfrac{\lambda s}{1+\lambda s}\bigg )^{k}. \end{aligned}$$
Let \(T_{k}\), with \(k\in \mathbb {N}\), be the random times denoting the arrival instants of the process N(t) such that \(T_{0}=0\). It is interesting to observe that the probability density function (p.d.f.) of \(T_k\) is expressed as follows:
We define \(D_{j,k}=T_{k}-T_{k-1}\), with \(1 \le j \le 4\) and \(k \in \mathbb {N}\), the increments between two consecutive events. Differently from the Poisson process, the GCP does not have the property of independent increments, hence, the random variables \(D_{j,k}\) are dependent. Moreover, making use of Eq. (10) in Di Crescenzo and Pellerey (2019), we get the marginal density for all intertimes \(D_{j,k}\), \(1 \le j \le 4\) and \(k \in \mathbb {N}\),
Moreover, we point out that the marginal cumulative distribution function (c.d.f.) for all (j, k) is \(F_{D_{j,k}}(t) = \lambda t/(1 + \lambda t)\), \(t \ge 0\). This c.d.f. does not have finite moments. We remark that \(D_{j,k}\) has a long right tail (see, for instance, Asmussen (2003)) since, for all \(t > 0\),
From density (6) it is not hard to see that \(D_{j,k}\) has a modified Pareto distribution which means that the intertimes of the GCP \(\{N(t), t >0\}\) have non-finite expectations. In addition, to obtain the explicit expressions of the process \(\varvec{X}(t)\), we recall the conditional survival function of \(D_{j,k}\) conditional on \(T_{k-1}=t\), for \(k \in \mathbb {N}\), is given by
and the corresponding probability density function (p.d.f.) of \(D_{j,k}\) conditional on \(T_{k-1}=t\), for \(k \in \mathbb {N}\), i.e.,
In the following, we determine the initial and absolutely continuous components of the probability law of the stochastic process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\), which describes a cyclic alternating random motion along four directions \(\vec {v}_j\), for \(1 \le j \le 4\), driven by independent GCPs with intensity \(\lambda _j\) (\(1 \le j \le 4\)). We remark that the intertimes of the GCPs are in practice more realistic since in real cases the counting processes under investigation do not have necessarily the independent increments property. Some applications may be found in geophysics (see Benson et al. (2007)), in climatology (see Lavergnat and Golé (1998)) or in modeling for internet traffic (see Clegg et al. (2010)). Moreover, in real applications the number of events in a fixed time interval does not always follow the Poisson distribution. Therefore, the class of GCPs is a possible alternative to Poisson processes. At least, the use of GCPs allows us to obtain the probability law of the process \(\varvec{X}(t)\) in a tractable way as shown in the remainder of the paper.
3 The Direction Vectors and the Support
In this section, we discuss the properties of the direction vectors and the geometrical features of the region generated by them, i.e., the set of all possible positions of the moving particle at time \(t>0\).
3.1 The Direction Vectors
Let \(\vec {v}_j\), \(1 \le j \le 4\), be the vectors representing the possible directions of the cyclic motion in \(\mathbb {R}^3\) moving with a constant velocity \(c>0\). We recall that 4 is the minimal number of directions for a non trivial motion in \(\mathbb {R}^3\). The direction \(\vec {v}_j\) can be expressed by using the spherical coordinates, as
where \(\vec {l}, \vec {m}, \vec {n}\) are the unit vectors along the Cartesian coordinate axes in \(\mathbb {R}^3\), \(\varphi _j\) is the azimuthal angle in the xy-plane from the x-axis with \(\theta _j \in [0,2\pi ]\) and \(\theta _{j}\) is the polar angle from the positive z-axis with \(\varphi _j \in [0,\pi ]\), for \(1 \le j \le 4\). This approach extends the strategy based on polar coordinates used for the planar motions studied in Di Crescenzo et al. (2023), for instance. The analytic representation of the directions is provided in Eq. (10), below.
The particle starts from the origin \(\varvec{0}=(0,0,0)\in \mathbb {R}^3\) at time \(t = 0\), running with constant velocity \(c > 0\). Initially, it moves along the direction \(\vec {v}_{1}\). Then, after a random duration \(D_{1,1}\), the particle switches instantaneously its direction, moving along \(\vec {v}_{2}\) for a random duration \(D_{2,1}\). Subsequently, it goes along \(\vec {v}_{3}\) and \(\vec {v}_{4}\) for a length of time \(D_{3,1}\) and \(D_{4,1}\), respectively. Thus, the particle motion proceeds cyclically along directions \(\vec {v}_j\) for the random periods \(D_{j,2}, D_{j,3}, D_{j,4}, \ldots\), such that, for each \(1 \le j \le 4\) and \(k, i \in \mathbb {N}\), we have
where \(\overset{d}{=}\) means equality in distribution. Hence, during the n-th cycle the particle moves along directions \(\vec {v}_j\) in sequence for the random lengths \(D_{j,n}\), with \(1 \le j \le 4\) and \(n \in \mathbb {N}\). In other words, the particle runs along direction \(\vec {v}_j\) and, after an intertime distributed as a CGP, it takes the direction \(\vec {v}_{j+1}\), with \(\vec {v}_{j+4n}=\vec {v}_j\), for \(1 \le j \le 4\) and \(n \in \mathbb {N}\). We note that the results concerning the cases of other initial direction, i.e., \(\vec {v}_2\), \(\vec {v}_3\), \(\vec {v}_4\), may be easily deduced. Now, in order to define the set of all possible positions occupied by the particle at an arbitrary time \(t >0\), we consider the following Remark.
Remark 1
Let be \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) the stochastic process defined in Section 2. Given the direction vectors \(\vec {v}_j\) with \(\vec {v}_{j+4n}=\vec {v}_j\), for \(1 \le j \le 4\) and \(n \in \mathbb {N}\), we have that the particle motion reaches any state of \(\mathbb {R}^3\) in a sufficiently large time \(t>0\), if and only if,
-
(i)
The set of direction vectors \(\{\vec {v}_1, \vec {v}_2, \vec {v}_3\}\) are linearly independent;
-
(ii)
The direction vector \(\vec {v}_4\in S\) with
$$\begin{aligned} S=\Big \{\xi (-\vec {v}_1)+\eta (-\vec {v}_2)+(1-\xi -\eta ) (-\vec {v}_3), 0 \ \le \xi ,\eta \le 1, \ \xi +\eta \le 1\Big \}. \end{aligned}$$
Hence, the set of all possible positions under the hypothesis of Remark 1 identifies as state space at time t a tetrahedron whose vertices coincide with the endpoints of the vectors \(ct\vec {v}_j\). In other words, the tetrahedron is defined as a 3-dimensional simplex where the interior points are convex combinations of the four vertices such that \(\sum _{j=1}^{4} \alpha _j \vec {v}_j\) with \(\sum _{j=1}^{4}\alpha _j =1\) and \(\alpha _j \ge 0\).
3.2 Analytic Representation of the Support
Let us consider the points \(A_j(t)\), \(1 \le j \le 4\), defined by \(\overrightarrow{\varvec{0}A_j(t)}=\vec {v}_j t\), where \(\varvec{0}=(0,0,0)\) is the origin of the Cartesian coordinate system. The points \(A_j(t)\), \(1 \le j \le 4\), given by
are the vertices of the support in \(\mathbb {R}^3\) at time \(t>0\), i.e., a time-dependent tetrahedron with edges \(E_{ij}(t)\) and faces \(F_{ijk}(t)\), \(1 \le i,j,k\le 4\) and \(i<j<k\). In particular, if the three different vertices \(A_i(t)\), \(A_j(t)\) and \(A_k(t)\) are not aligned, then the particle reaches any point of the support in \(\mathbb {R}^3\). This is true since the matrix generated by two adjacent segments \(\overrightarrow{A_i (t)A_k(t)}\) and \(\overrightarrow{A_k(t) A_j(t)}\) has maximum rank, i.e. 2. Therefore, under the assumptions of Remark 1 the equations linking two adjacent vertices can expressed as
where
and,
We recall that V(t) is the current direction of motion at time t. Assuming that V(0) takes value \(\vec {v}_1\), we are able to determine the analytic expression of the support in \(\mathbb {R}^{3}\), say \(\mathcal {T}(t)\), i.e., the set of all positions allocated by the particle when it is confined in a tetrahedron, defined as
where the given conditions derive from Eq. (11). In general, the particle motion includes different mutually exclusive cases based on the initial assumptions \(\varvec{X}(0)=\varvec{0}\) and \(V(0)=\vec {v}_j\), for a fixed \(1\le j\le 4\). More precisely, the particle is situated on the vertices \(A_j(t)\) of \(\mathcal {T}(t)\) if no direction changes occur up to time t, while if one event occurs then, at time t, it will be located on some edge \(E_{ij}\) of \(\mathcal {T}(t)\). Two events allow the particle to reach one of the faces \(F_{ijk}\) of \(\mathcal {T}(t)\) and three or more changes of direction force the particle to be placed inside \(\mathcal {T}(t)\). Therefore, recalling Remark 1, the following holds.
Remark 2
For the probability law of the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) we have:
-
(i)
The first component is related to the case when no event occurs in the interval (0, t), i.e., \(N(t)=0\), and the particle is concentrated on the vertices of \(\mathcal {T}(t)\);
-
(ii)
The second component is concerning the situation in which one event happens at time t, i.e., \(N(t)=1\), and the particle is located on some edge of \(\mathcal {T}(t)\);
-
(iii)
The third component corresponds to the instance when two events occur, i.e., \(N(t)=2\) and the particle reaches one of the faces of \(\mathcal {T}(t)\);
-
(iv)
The forth component, which is absolutely continuous, refers to the case when \(N(t) \ge 3\), i.e. when the particle is placed strictly in the interior of \(\mathcal {T}(t)\), namely \(\textrm{Int}(\mathcal {T}(t))\).
4 The Probability Law
To define the conditional distributions of the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\), we denote by
the event that the particle starts its motion from the origin \(\varvec{0}\) when the initial direction is \(\vec {v}_i\), \(1\le i \le 4\). Therefore, let \(\mathbb {P}_i\) be the probability conditional on \(C_i\).
The conditional probability laws given \(C_i\) are composed by two contributions:
-
(i)
The initial components given by the terms related to the beginning of the motion. Specifically, they describe the cases in which the particle is over the border of the support \(\mathcal {T}(t)\) in \(\mathbb {R}^3\).
-
(ii)
The absolutely continuous component related to the particle motion inside the support \(\mathcal {T}(t)\) in \(\mathbb {R}^3\).
For the case (ii) we define
with \(1 \le i,j \le 4\) and where \(d \varvec{x}\) is the infinitesimal element in the space \(\mathbb {R}^3\) with the Lebesgue measure \(\mu (d \varvec{x})=dx_1 dx_2 dx_3\) (i refers to the initial velocity, and j to the current velocity at time t). The right-hand-side of Eq. (14) represents the probability that the particle at time \(t>0\) is located in a neighborhood of \(\varvec{x}\in \mathbb {R}^3\) and moves along direction \(\vec {v}_j\), given the initial condition represented by \(C_i\). Moreover, we can introduce the probability density function (p.d.f.) of the particle location \(\varvec{X}\)(t) at time \(t>0\), i.e.,
Due to Eqs. (14) and (15), one immediately has
In order to determine the probability law of the stochastic process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\), we assume that the starting direction at time t is \(\vec {v}_1\), so that, the initial condition is \(C_1\) as defined in Eq. (13). Therefore, the following results are obtained by taking into account the cases (i)-(iv) considered in Remark 2.
Theorem 1
(Initial components) Let be \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) the stochastic process defined in Section 2. For \(t \ge 0\) we have
and
where \(D_{j, k}\) is the random duration of the k-th time interval during which the particle moves with velocity \(\vec {v}_j\), for \(1 \le j \le 3\) and \(k \in \mathbb {N}\).
Proof
Equations (17), (18) and (19), when \(V(0)=\vec {v}_1\), are easily obtained, under the conditions (i), (ii) and (iii) of Remark 2.\(\square\)
Using Eq. (14) and recalling (iv) of Remark 2, we determine the absolutely continuous components of the probability law of the X(t) conditioned on \(C_1\), for \(t>0\) and \(1 \le j \le 4\), i.e., the densities
In order to give the expression of \(p_{1 j} ( \varvec{x}, t)\) we introduce the linear map \(\zeta : \mathbb {R}^{4} \longrightarrow \mathbb {R}^{4}\) defined by:
for \(\varvec{t}=(t_1,t_2,t_3,t_4)\), and where \(x_1{_{\vec {v}_{j}}}\), \(x_2{_{\vec {v}_{j}}}\) and \(x_{3_{\vec {v}_{j}}}\) are the components of the vectors \(\vec {v}_{j}\) (\(1\le j \le 4\)) respectively along the \(\varvec{x}\)-axes. When a cycle of the random motion ends after a period \(\varvec{t}\) the function \(\zeta (\varvec{t})\), given in Eq. (21), provides a vector containing the displacements performed along the \(\varvec{x}\)-axes during the cycle, as well as its whole duration.
Moreover, we consider the transformation matrix \(\varvec{A}\) of function \(\zeta (\varvec{t})\) expressed in terms of spherical coordinates, i.e.,
with
Remark 3
Recalling (10), we observe that the determinant \(\det (t\varvec{A})\) represents the volume \(Vol(\mathcal {T}(t))\) of \(\mathcal {T}(t)\) defined in (12).
Now, given a sample path of the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\), we denote by \(\tau _j = \tau _j(\varvec{x})\) the non negative random variables representing the dwelling times of the particle motion in each direction \(\vec {v}_{j}\) (\(1\le j \le 4\)) during [0, t] (i.e., the residence times for the process \(\varvec{X}(t)\) on the event that \(\varvec{X}(t) = \varvec{x}\), \(V(t)=\vec {v}_j\)), so that
Therefore, recalling (22) and (10), we can express \(\tau _j\), \(1\le j \le 4\), as the 4-tuple
with
where \(\sigma _{ij}=\frac{1}{det \varvec{A}} \, cof_{ij} (\varvec{A})\) with \(cof_{ij} (\varvec{A})=(-1)^{i+j} det A_{ij}\), \(1 \le i,j \le 4\). Moreover, since the function \(\zeta (\varvec{t})\), for all \(\varvec{x}\in \mathbb {R}^{3}\), is bijective (see, for more details, Lachal (2006)), it is easy to see that \(\varvec{\tau }=(\tau _1,\tau _2,\tau _3,\tau _4)^T\) is solution of the system \(\varvec{A \tau } = (\varvec{x},t)^T\). More precisely, in the following proposition the explicit form of Eq. (24) can be obtained.
Proposition 2
Making use of Eq. (24), for all \(\varvec{x} \in \mathbb {R}^3\) the coordinates \(\tau _j\), for \(1\le j \le 4\) and \(c>0\), are expressed as
where
where \(a \hat{+} b\) denotes \((a + b)\ mod\, 4\) and \(det \varvec{A}\) can be recovered from (22).
Proof
Recalling Eqs. (10), (23) and (24), after straightforward calculations Eq. (25) is determined.\(\square\)
Now, for the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) we are able to formulate the following theorem about the absolutely continuous component concerning assumption (iv) of Remark 2. For this purpose, we indicate with \(f_{D_j^{(n)}}\) the probability density function (p.d.f.) of \(D_j^{(n)}\) given in Eq. (1), \(1 \le j\le 4\), and with \(\overline{F}_{D_{j,k+1} \vert D_j^{(k)}}\) the conditional survival function of \(D_{j,k+1}\) given \(D_{j}^{(k)}\), for \(1 \le j\le 4\) and \(k \in \mathbb {N}_0\).
Theorem 3
(Absolutely continuous component) For the stochastic process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) defined in Section 2, under the initial condition given in Eq. (13) with direction \(\vec {v}_1\), we have that, for all \(\varvec{x} \in \textrm{Int}(\mathcal {T}(t))\) and \(t>0\), the absolutely continuous component of the probability law is given by
where \(\tau _{j}=\tau _{j}(\varvec{x},t)\), for \(1 \le j \le 4\), is defined in Eq. (25), and \(det \varvec{A}\) is given in Eq. (23).
Proof
By conditioning on the number of direction switches in (0, t), say k, and on the last time s previous t in which the particle changes its velocity from \(\vec {v}_4\) to \(\vec {v}_1\) in order to restart a new cycle, we reformulate Eq. (20), for \(\varvec{x} \in \mathbb {R}^3\) and \(t>0\), as follows:
for \(1 \le j \le 4\) and where \(T_{4k+j-1}\) is the instant occurring at time s in which the particle changes its direction to velocity \(\vec {v}_{j}\). Thus, \(\varvec{X}(s)=(X_1(s),X_2(s),X_3(s))\) is the position of the particle when a change of direction occurs. Therefore, due to Eq. (4), we have
Hence, for \(s=T_{4k+j-1}\) and using Eq. (1), we can express the coordinates of the particle position \(\varvec{X}(s)\) as follows
The conditions defined in (12) and \(\varvec{X}(s) \in \mathcal {T}(s)\) implies that \(s>t-\tau _{j}\), for \(1\le j\le 4\). Moreover, using (22) and substituting Eq. (28) in Eq. (27). we have:
where \(\Psi _{j,k}\) is the joint p.d.f. of \(( T_{4k+j-1}, X_1( T_{4k+j-1}),X_2( T_{4k+j-1}),X_3( T_{4k+j-1}))\) with:
According to (21), for \(1\le j\le 4\), we have
Moreover, given the mutual independence of the variables \(\{ D_{j,k}; k\in \mathbb {N}\}\), for \(1 \le j\le 4\), we get
Therefore, Eq. (26) is directly obtained replacing Eq. (30) in Eq. (29).\(\square\)
We point out that Eq. (26) is in analogy with Eq. (4.1) of Lachal (2006) in which a particular case of the minimal cyclic random motion in \(\mathbb {R}^d\) (\(n=d+1\) directions, \(n \le d\)) is investigated. Specifically, the integral formulation given in Eq. (26) is based on the application of Eqs. (7) and (8) where the assumption of dependent increments, instead of the typical exponential distribution, is taken into account. Differently, in Orsingher and Sommella (2004) and Lachal et al. (2006) the explicit form of the absolutely continuous part of \(\varvec{X}(t)\) is determined by using an approach based on the Bessel functions of higher order.
Note that we analyze the motion in \(\mathbb {R}^3\) since the amount of calculations needed is tractable and the obtained results are applicable for practical problems. Hence, we can easily conjecture that in \(\mathbb {R}^n\) the structure of the absolutely continuous component of the distribution of a cyclic motion with \(n+1\) directions (with directions forming a regular or possible irregular tetrahedron) is similar to Eq. (26). We remark that the n-dimensional case will be object of a future work.
Clearly, the results given in Theorems 1 and 3 for the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) can be extended similarly when the particle starts with velocity \(\vec {v}_l\), for \(2\le l \le 4\). Using this new scheme, a fixed initial direction allows us to obtain tractable expressions for the probability law of the process as illustrated in the following section.
5 A Special Case
In this section we analyze a special case of the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\), with initial condition defined by Eq. (13) when \(V(0)=\vec {v}_1\) and for fixed directions.
Assumption 1
The following conditions hold:
-
(i)
The particle’s motion is confined in a regular tetrahedron \(\mathcal {T}(t)\) characterized by the vertices:
$$\begin{aligned} \begin{aligned} A_{1}(t)&=ct\big (1,0,0\big ), \quad A_{2}(t)=ct\bigg (-\frac{1}{3}, \frac{2\sqrt{2}}{3},0\bigg ), \\ A_{3}(t)&=ct\bigg (-\frac{1}{3}, -\frac{\sqrt{2}}{3},\sqrt{\frac{2}{3}}\bigg ), \quad A_{4}(t)=ct\bigg (-\frac{1}{3}, -\frac{\sqrt{2}}{3},-\sqrt{\frac{2}{3}}\bigg ). \end{aligned} \end{aligned}$$(31)The vertices in (31) refer to (10) with appropriate choices of \(\theta _j\) and \(\varphi _j\), \(1 \le j \le 4\). More precisely, the motion is characterized by the four directions led by the angles given in Table 1. A graphical representation is shown in Fig. 1.
-
(ii)
The vertices in Eq. (31), identified by the directions \(\vec {v}_{j}\), for \(1 \le j \le 4\), satisfy the conditions (i)-(iv) listed in Remark 2.
-
(iii)
The random times \(D_{j,n}\), for \(n \in \mathbb {N}\) and \(1\le j \le 4\), represent the j-th duration of the motion within the n-th cycle and constitute the intertimes of a GCP with intensity \(\lambda _{j} \in \mathbb {R}^{+}\).
An example of projections onto the state-space \(\mathbb {R}^3\) of suitable paths of the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) under the Assumptions 1 is shown in Fig. 1. It is easy to see that the particle can eventually reach any position of \(\mathbb {R}^3\), since \(\mathcal {T}(t) \rightarrow \mathbb {R}^3\) as \(t \rightarrow \infty\).

A sample of the set \(\mathcal {T}(t)\), with directions \(\vec {v}_j\), for \(1 \le j \le 4\), and fixed vertices given in (31)
Moreover, by taking into account the region defined in (12) and Assumptions 1 we have that at every time \(t >0\) the set of possible positions \(\varvec{x} \in \mathbb {R}^3\) of the moving particle is the tetrahedron
Remark 4
We observe that the set \(\mathcal {T}(t)\) grows as time elapses and, recalling Remark 3, the volume is given by \(Vol(\mathcal {T}(t))= \big (\frac{4}{3}\big )^{2}\sqrt{3}(ct)^3\).
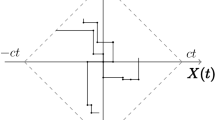
Two sample paths of the region \(\mathcal {T}(t)\), defined in (32), with directions \(\vec {v}_j\), \(1 \le j \le 4\), is illustrated in Fig. 2.

Two possible paths with the first four segments of the cyclic motion defined in Section 2 under the conditions of Remark 1 with \(c=t=1\). The initial velocity is \(\vec {v}_1\)
Under the hypothesis of Assumptions 1, we are now able to determine the explicit probability laws of the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) when the random intertimes of the motion along the possible directions \(\vec {v}_j\) follow four possible independent GCPs with intensities \(\lambda _j\), \(1 \le j \le 4\). Specifically, in the following theorem, in order to obtain a tractable form for the third component given in (iii) of Remark 2, we assume that the sojourn times along the directions \(\vec {v}_1\), \(\vec {v}_2\), and \(\vec {v}_3\) follow three independent GCPs with identical intensity \(\lambda\) (i.e., \(\lambda _1=\lambda _2=\lambda _3:=\lambda\)).
Theorem 4
(Initial components) Let \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) be the stochastic process defined in Section 2 under the initial condition defined in Eq. (13) with velocity \(\vec {v}_1\). If Assumption 1 hold and the four sequences of intertimes are identically distributed and follow a GCP with intensity \(\lambda _j\), \(1 \le j \le 4\), then for all \(t \ge 0\), we have
and
where for \(\lambda _1=\lambda _2=\lambda _3=\lambda\) one has
where \(Li_2(\cdot )\) is the dilogarithm function.
Proof
Recalling Theorem 1, under Assumption 1, Eq. (33) is obtained making use of Eq. (6) in the following expression
Similarly, Eqs. (34) and (35), when \(V(0)=\vec {v}_2\) and \(V(0)=\vec {v}_3\), are given by
and
respectively, after some calculations.\(\square\)

Left to right: plot of \(\eta _1(t)\) with \(\lambda _1=\) 1 (solid), 2 (dotted), 10 (dashed); plot of \(\eta _2(t)\) with \(\lambda _1=1\) and \(\lambda _2=2\) (solid line), \(\lambda _1=2\) and \(\lambda _2=4\) (dotted line), \(\lambda _1=5\) and \(\lambda _2=10\) (dashed line); plot of \(\eta _3(t)\) with \(\lambda =\) 1 (solid), 5 (dotted), 10 (dashed)
In Fig. 3 are shown some plots of the probabilities given in Eqs. (33), (34) and (35) for different choices of the intensities \(\lambda _j\), \(1 \le j \le 3\), respectively.
Theorem 5
(Absolutely continuous components) Let \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) be the stochastic process defined in Section 2 under the initial condition defined in Eq. (13) with velocity \(\vec {v}_1\). For all \(\varvec{x} \in \textrm{Int}(\mathcal {T}(t))\), with \(\mathcal {T}(t)\) given in (32), we have
with
and where the terms \(\tau _{j}=\tau _{j}(\varvec{x},t)\), for \(1\le j \le 4\), are given by
Proof
Equations (36) are obtained in a closed form as an immediate consequence of Theorem 3 after straightforward calculations.
We observe that the values of \(\tau _{j}\) in (37) are obtained directly from Eq. (25) in Proposition 2. Moreover, due to Eq. (16), under the assumptions of Theorem 5 the p.d.f. \(p_1(\varvec{x},t)\) can be immediately obtained from Eq. (36).

Plot of \(p_1(\varvec{x},t)\) for \(c=t=1\) and \(x_1=1/2\) on the left-side and \(c=1\), \(t=2\) and \(x_1=1\) on the right-side
As example, some plots of \(p_{1}(\varvec{x},t)\) are illustrated in Fig. 4 for fixed \(c>0\) and \(t>0\) and \(x_1 \in (-ct/3, ct)\). Note that the domain for \((x_2,x_3)\) has a triangular form. Moreover, from Eq. (32) and Theorem 5 it is clear that the dependence on c and t is expressed through the product ct.
Hereafter, we study the asymptotic behaviour of the p.d.f. of the particle location \(\varvec{X}(t)\) defined in (16) when the intensities \(\lambda _j\) tend to infinity, for \(1 \le j\le 4\). In particular, substituting Eq. (36) in Eq. (16) we obtain the following corollary.
Corollary 1
Under the assumptions of Theorem 5, for \(t >0\) and \(\varvec{x} \in \textrm{Int}(\mathcal {T}(t))\) one has
where \(\xi (\varvec{x},t)\) is the following p.d.f.
with \(\tau _{j}\) expressed in (25).
Some instances of \(\xi (\varvec{x},t)\) given in Eq. (38) are plotted in Fig. 5 for fixed \(c>0\) and \(t>0\), with \(x_1 \in (-ct/3, ct)\).

Plot of \(\xi (\varvec{x},t)\) for \(c=t=1\) and \(x_1=1/2\) on the left-side and \(c=1\), \(t=2\) and \(x_1=1\) on the right-side
Remark 5
Under the assumptions of Theorem 5, we note that, for \(t >0\) and \(1 \le j \le 4\), the limit of \(p_1(\varvec{x},t)\) for \((x_1,x_2,x_3) \rightarrow (ct \cos \theta _j \sin \varphi _{j}, ct\sin \theta _{j} \sin \varphi _{j}, ct \cos \varphi _{j})\) can be computed in a closed form that we omit due to its complexity.
Similarly to the classical telegraph process driven by the Poisson process (see, e.g., Lemma 2 of Orsingher (1990)), it is not hard to see that the process \(\varvec{X}(t)\) does not admit a stationary state. In the next corollary making use of Eq. (16) we analyze the asymptotic behaviour of density \(p_1(\varvec{x},t)\) when the time t tends to \(+\infty\).
Corollary 2
Under the assumptions of Theorem 5, for \(t >0\) and \(\varvec{x} \in \textrm{Int}(\mathcal {T}(t))\) one has
Proof
Recalling Eq. (16), the stated result follows by noting that each density \(p_{1,j}(\varvec{x},t)\) in (36), for \(1 \le j \le 4\), behaves as \(t^{-3}\) as t tends to infinity.\(\square\)
The results expressed in this section for \(V(0)=\vec {v}_1\) can be extended to the cases \(V(0)=\vec {v}_j\), for \(2 \le j\le 4\), by using a similar strategy.
6 Concluding Remarks
In this paper we analyzed a finite random motion in \(\mathbb {R}^3\) where the sojourn times along each direction form four independent GCPs, and where the possible directions alternate cyclically. This work has been inspired by Di Crescenzo et al. (2023) with the aim to define similar processes in higher dimensions with possibly variable velocities. Potential applications in biomathematics, engineering, financial and actuarial sciences allow to investigate possible future developments also oriented to the study of the first-passage-time problem.
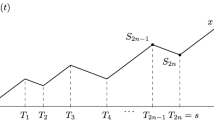
Here, in order to illustrate the basic issues of this problem, we introduce the (upward) first-passage time for the first component of the process \(\{(\varvec{X}(t),V(t)), t \ge 0\}\) through a constant barrier, say \(\beta > 0\), conditional on \(C_1\) (cf. Equation (13)) given by
for \(c>0\). The probability distribution of (39) can be expressed in terms of the sub-density functions:
In particular, by the law of total probability, we express the conditional distribution of \(\tau _\beta\) in the form
where \(\delta _{\frac{\beta }{c}}\) is the Dirac delta measure at \(\frac{\beta }{c}\), and N(t) is the alternating counting process introduced in Eq. (2). The first term on the right-hand-side of (40) corresponds to the motion without any direction switching up to time t. The series on the right-hand side of (40) represents the absolutely continuous component of the first-passage-time distribution, which arises when at least one direction reversal occurs. We also recall that \(D_{1,1}\), defined in Eq. (1), is the random duration of the first time interval during which the particle proceeds with velocity \(\vec {v}_1\). In order to describe the first-passage-time problem, we consider as threshold the plane \(x_1=\beta\) and project the vectors \(\vec {v}_j\), for \(1 \le j \le 4\), onto the \(x_1\)-axes according to the following relation
The latter is the projection of the vector \(\vec {v}_j\) on \(\vec {w}_1\), which is the versor along the \(x_1\)-axes. An illustration of the problem is shown in Fig. 6.

Illustration the constant barrier \(\beta > 0\) for the first-passage time problem introduced in (39)
Clearly, under Assumption 1 of Section 5, we have:
Due to the complexity of the problem, we discuss only the first cycle of particle motion concerning \(D_{j,1}\) (\(1 \le j \le 4\)). We point out that the particle may reach the threshold \(x_1=\beta\) only when it runs with velocity \(\vec {v}_{1_{x_1}}\), since the other directions \(\vec {v}_{2_{x_1}}\), \(\vec {v}_{3_{x_1}}\) and \(\vec {v}_{4_{x_1}}\) refer to motion in the opposite direction. Moreover, with reference to the first term in the right-hand-side of (40), one has
Clearly, during the random periods \(D_{2,1}, D_{3,1}, D_{4,1}\), when the particle moves with velocity \(\vec {v}_{2_{x_1}}= \vec {v}_{3_{x_1}}=\vec {v}_{4_{x_1}}=-\frac{c}{3}\), it cannot reach the threshold \(\beta\) since it moves in the opposite direction. Therefore, the position occupied by the particle at the end of the first period of motion \(D_1^{(1)}\) is given by
It is worth mentioning that the determination of an explicit form for the terms in the series of (40) is in general very difficult even when k is small and when the intensities \(\lambda _i\) are equal. Hence, in view of possible future developments, in a forthcoming investigation we aim to apply computational methods to determine the related probabilities.
In conclusion, as already mentioned in Section 1, we stress that the analysis of finite-velocity random motions in multidimensional domains deserves interest in various applied fields. In particular, the motion of a particle in a three-dimensional space as studied in this paper provides possible applications also in chemistry, since the tetrahedral geometry characterizes the shape of many molecules. Indeed, the motion of a particle is isotropic, i.e., the direction of its movement is uniformly distributed on the unit sphere in \(\mathbb {R}^3\). Thus, according to this interpretation, Eq. (15) can be employed to represent the wave function of the electron. Moreover, applications in chemistry are also motivated as follows. Silicon is a semiconductor widely present in nature and characterized by a tetrahedral crystalline lattice. Semiconductor doping techniques consist of introducing impurities into the lattice, and are applied to alter their electrical conductivity. If phosphorus is introduced into the crystalline structure of silicon, it happens that 4 electrons of phosphorus replace the 4 ones of silicon, and the last electron of phosphorus will instead be free to travel within the lattice (cf. Schubert (1993)). Hence, the stochastic process \(\{(\varvec{X}(t),V(t)), t \ge 0 \}\) studied in this paper may be employed to describe the alternating motion of such an electron within the tetrahedral structure. Stimulated by this correspondence, possible future developments may be finalized to generate a more exhaustive model, enriched by a larger number of possible directions of the motion.
Further interesting real applications of finite-velocity random motions for modelling random occurrences of events in time and space are related, for instance, to biology (for the random motions of microorganisms), to geology (for alternating trends in volcanic areas), and to physics (for the vorticity motion in two or more dimensions, see Orsingher and Ratanov (2008)). Moreover, finite-velocity random motions in \(\mathbb {R}^3\) are also useful to describe the movements of particles in gases, see, for instance, Reimberg and Abramo (2013), where the authors introduce an application to the study of photon propagation in the Cosmic Microwave Background (CMB) radiation. At least, using a similar approach, relevant real applications in higher dimensions concerning cyclic random motions under a GCP can be explored in future works even if the computation complexity in the resolution of the probability law is a very hard task. Hence, in our view the finite-velocity random motion discussed here is an extension of the telegraph process to the space \(\mathbb {R}^3\) and it is probably one of the possible ways for which the explicit distribution of the position \(\varvec{X}(t)\), under the assumption introduced in Section 2.1, can be determined.
Data Availability
Not applicable.
References
Asmussen SR (2003) Steady-State properties of GI/G/1. Applied Probability and Queues Stoch Model Appl Probab 51:266–301
Beghin L, Nieddu L, Orsingher E (2001) Probabilistic analysis of the telegrapher’s process with drift by means of relativistic transformations. J Appl Math Stoch Anal 14(1):11–25
Benson DA, Schumer R, Meerschaert MM (2007) Recurrence of extreme events with power-law interarrival times. Geophys Res Lett 34:L16404
Cha JH, Finkelstein M (2013) A note on the class of geometric counting processes. Probab Eng Inf Sci 27(2):177–185
Cinque F, Orsingher E (2023) Random motions in \(\mathbb{R} ^3\) with orthogonal directions. Stoch Process Appl 161:173–200
Cinque F, Orsingher E (2023) Stochastic dynamics of generalized planar random motions with orthogonal directions. J Theor Probab 1-33
Clegg RG, Di Cairano-Gilfedder C, Shi Z (2010) A critical look at power law modelling of the Internet. Comput Commun 33:259–268
De Gregorio A (2012) On random flights with non-uniformly distributed directions. J Stat Phys 147(2):382–411
Di Crescenzo A (2002) Exact transient analysis of a planar random motion with three directions. Stoch Stoch Rep 72(3–4):175–189
Di Crescenzo A, Iuliano A, Mustaro V (2023) On some finite-felocity random motions driven by the geometric counting process. J Stat Phys 190(3):44
Di Crescenzo A, Pellerey F (2019) Some results and applications of geometric counting processes. Methodol Comput Appl Probab 21(1):203–233
Hartmann AK, Majumdar SN, Schawe H (2020) Schehr G (2020) The convex hull of the run-and-tumble particle in a plane. J Stat Mech Theory Exp 5:053401
Kolesnik AD (1998) The equations of Markovian random evolution on the line. J Appl Probab 35(1):27–35
Kolesnik AD (2006) Discontinuous term of the distribution for Markovian random evolution in \(\mathbb{R} ^{3}\). Bul Acad de Stiinte Republicii Mold Mat 51(2):62–68
Kolesnik AD, Turbin AF (1998) The equation of symmetric Markovian random evolution in a plane. Stoch Process Appl 75(1):67–87
Kolesnik AD, Orsingher E (2002) Analysis of a finite-velocity planar random motion with reflection. Theory Probab Appl 46(1):132–140
Kolesnik AD, Ratanov N (2023) Telegraph processes and option pricing, 2nd edn. Springer, Berlin
Lachal A (2006) Cyclic random motions in-space with n directions. ESAIM Probab Stat 10:277–316
Lachal A, Leorato S, Orsingher E (2006) Minimal cyclic random motion in \(\mathbb{R} ^{n}\) and hyper-Bessel functions. 658 Ann Inst Henri Poincare (B) Probab 42(6):753–772
Lavergnat J, Gol P (1998) A stochastic raindrop time distribution model. J Appl Meteorol 37:805–818
Martens K, Angelani L, Di Leonardo R, Bocquet L (2012) Probability distributions for the run-and-tumble bacterial dynamics: An analogy to the Lorentz model. Eur Phys J E 35:1–6
Masoliver J, Porra JM, Weiss GH (1993) Some two and three-dimensional persistent random walks. Phys A: Stat Mech Appl 193(3–4):469–482
Orsingher E (1986) A planar random motion governed by the two-dimensional telegraph equation. J Appl Probab 23(2):385–397
Orsingher E (1990) Probability law, flow function, maximum distribution of wave-governed random motions and their connections with Kirchoff’s laws. Stoch Process Appl 34(1):49–66
Orsingher E (2002) Bessel functions of third order and the distribution of cyclic planar motions with three directions. Stoch Stoch Rep 74:617–631
Orsingher E, De Gregorio A (2007) Random flights in higher spaces. J Theor Probab 20:769–806
Orsingher E, Garra R, Zeifman AI (2020) Cyclic random motions with orthogonal directions. Markov Process Relat Fields 26(3):381–402
Orsingher E, Ratanov N (2008) Random motions in inhomogeneous media. Theory Probab Math Stat 76:141–153
Orsingher E, Sommella AM (2004) A cyclic random motion in \(\mathbb{R}^3\) with four directions and finite velocity. Stoch Stoch Rep 76(2):113–133
Pogorui AA (2012) Evolution in multidimensional spaces. Random Oper Stoch 20(2):135–141
Pogorui AA, Rodríguez-Dagnino RM (2011) Isotropic random motion at finite speed with K-Erlang distributed direction alternations. J Stat Phys 145:102–112
Pogorui AA, Rodríguez-Dagnino RM (2021) Distribution of random motion at renewal instants in three-dimensional space. J Math Sci 254:416–424
Pogorui A, Swishchuk A, Rodríguez-Dagnino RM (2021) Random motions in Markov and Semi-Markov random environments 1: Homogeneous random motions and their applications. John Wiley & Sons
Pogorui A, Swishchuk A, Rodríguez-Dagnino RM (2021) Random motions in Markov and Semi-Markov random environments 2: High-dimensional random motions and financial applications. John Wiley & Sons
Reimberg PH, Abramo LR (2013) CMB and random flights: temperature and polarization in position space. J Cosmol Astropart Phys 2013(06):043
Santra I, Basu U, Sabhapandit S (2020) Run-and-tumble particles in two dimensions: Marginal position distributions. Phys Rev E 101(6):062120
Schubert EF (1993) Doping in III-V semiconductors. Cambridge studies in semiconductor physics and microelectronic engineering. Cambridge University Press. AT &T Bell Laboratories, New Jersey
Stadje W (1987) The exact probability distribution of a two-dimensional random walk. J Stat Phys 46:207–216
Stadje W, Zacks S (2004) Telegraph processes with random velocities. J Appl Prob 41(3):665–678
Acknowledgements
The authors are members of the group GNCS of INdAM (Istituto Nazionale di Alta Matematica).
Funding
Open access funding provided by Università degli Studi della Basilicata within the CRUI-CARE Agreement. This work is partially supported by “INdAM - GNCS Project”, codice CUP E53C23001670001, “Metodi analitici e computazionali per processi stocastici multidimensionali ed applicazioni” and by “European Union - Next Generation EU” through MUR-PRIN 2022 PNRR, project P2022XSF5H “Stochastic Models in Biomathematics and Applications”.
Author information
Authors and Affiliations
Contributions
AI and GV contributed equally to this work.
Corresponding author
Ethics declarations
Competing Interest
The authors have no other relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Iuliano, A., Verasani, G. A Cyclic Random Motion in \(\mathbb {R}^3\) Driven by Geometric Counting Processes. Methodol Comput Appl Probab 26, 14 (2024). https://doi.org/10.1007/s11009-024-10083-0
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11009-024-10083-0