
Abstract
We revisit the construction of quantum Riemannian geometries on graphs starting from a hermitian metric compatible connection, which always exists. We use this method to find quantum Levi-Civita connections on the n-leg star graph for \(n=2,3,4\) and find the same phenomenon as recently found for the \(A_n\) Dynkin graph that the metric length for each inbound arrow has to exceed the length in the other direction by a multiple, here \(\sqrt{n}\). We then study quantum geodesics on graphs and construct these on the 4-leg graph and on the integer lattice line \(\mathbb {Z}\) with a general edge-symmetric metric.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In recent works [4, 8,9,10, 22], we have introduced a radically new way of thinking about classical geodesics which then extends to noncommutative or ‘quantum’ Riemannian geometry (QRG) where coordinate algebras A and their differential forms do not (graded) commute in the usual way. We use the formalism of the recent text [5]. Such QRGs could arise as a better model of spacetime due to quantum gravity effects, but what is relevant to us here is that they also arise for any graph [27]. Here, the algebra of functions A is still commutative, namely functions on the vertices, but the space of differential 1-forms \(\Omega ^1\) is intrinsically noncommutative as an A-bimodule, namely spanned as a vector space by the arrows of the graph. Arrows are bilocal objects with distinct left and right actions of A according to the value of a function at the source or target of the arrow. A metric in our formalism needs a bidirected graph and is then literally an assignment of a nonzero ‘square length’ to each arrow, with a symmetry requirement. The usual choice for the latter is ‘edge symmetric’ [26] where opposite arrows have the same length so that a metric is just an assignment to the undirected edge, i.e. again what we might intuitively think of as a metric for a graph. In this way, once we allow noncommutative differentials, discrete geometry sits very naturally as a special case of noncommutative differential geometry.
What is important here is that this approach to discrete geometry is not ad hoc but within a general formalism that applies to any A, with \(C^\infty (M)\) at one extreme and graph geometry at another extreme. This can also be achieved within Connes formalism of noncommutative geometry e.g. via spectral triples [16], but here we do not consider Dirac operators. Rather, the QRG formalism as in [5] and works such as [1, 7, 21, 26, 28] is more constructive with direct access to geometric quantities such as the quantum metric tensor \(\mathfrak {g}\in \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) and a specific notion of quantum Levi-Civita connection \(\nabla :\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\). The two approaches are not incompatible and it would be an interesting question as to how to formulate comparable quantum geodesics in Connes approach. It is also fair to say that the QRG approach grew out of experience with quantum groups and a wealth of literature driven by mathematical physics as much as from purely mathematical considerations. Early physics works seeking to apply quantum differentials to lattice gauge theory and gravity are [14, 17, 18, 24, 25], although with different approaches than the QRG one. Bimodule connections of the type used in QRG appeared in [19, 29]. Recent interesting works by others using bimodule connections include [13] and [12] and in slightly different formalisms [3, 11].
Next, without going into details, the idea of quantum geodesics is of interest even in classical geometry and consists of a new way of thinking about geodesics, as follows. First, we do not think about one geodesic at a time but rather a flow of geodesics much like in fluid dynamics, where each particle moves along a geodesic. The tangent vectors to these geodesics form a geodesic time-dependent vector field X(t), and it turns out that these obey a simple geodesic velocity equation which (classically) is just
This says that the convective derivative of X is zero in fluid terms. Next, instead of an actual (evolving) fluid particle density \(\rho (t)\), we have an evolving wave function \(\psi (t)\) with \(|\psi (t)|^2=\rho (t)\) thought as a density, and we solve for \(\psi \) by the amplitude flow equation which (classically) is just
If one considers bump functions, then classically this reproduces a bump travelling with velocity X(t) evaluated at the bump, i.e. a classical geodesic as expected. If \(\psi \) is real positive valued, then this is equivalent to working with \(\rho \). The latter would then be more in the spirit of optimal transport [23], where one evolves measures, as well as potentially relevant to fluid mechanics on curved spaces, see [30] for a review. But if \(\psi \) can go negative or is complex valued, then there are possible interference effects as normally associated with quantum mechanics. In the general noncommutative case, \(\psi (t)\in A\) is an element of a \(*\)-algebra and \(|\psi (t)|^2\) is replaced by the positive operator \(\psi (t)^*\psi (t)\ge 0\) but nevertheless behaves like a probability density when used to compute expectation values with respect to a reference positive linear functional \(\int :A\rightarrow \mathbb {C}\). Classically, this could be the Riemannian measure of integration via weight \(\sqrt{|\textrm{det}(g)|}\). In our graph case using QRG, we similarly take \(\int f=\sum _{x}\mu _x f(x)\) where we sum over the vertices with weights \(\mu \). Quantum geodesics are defined for any measure, but a natural choice is to be compatible with the QRG in the sense [9] that \(\int \) of a total divergence vanishes, as would be the case classically for the Riemannian measure. Either way, we impose a reality condition on the geodesic velocity field that ensures that the flow is unitary in the sense of preserving \(\int \psi ^*\psi \), which we call an ‘improved auxiliary condition’ [9]. One of the new features of the present work is to further generalise this set-up by allowing an imaginary driving force F on the right-hand side of the quantum version of (1) which can alternatively be used to maintain unitarity of the amplitude flow (our previous auxiliary condition now appears as \(F=0\)). Such auxiliary conditions would be automatic in the classical case as everything remains real without the need for any driving force. Finally, there is an ideological leap even in the classical case, namely A could be or play the role of functions on spacetime not ‘space’. In this case, \(\psi \) are amplitude densities for events in spacetime not for locations of a particle in space and the time parameter, which we denoted by t above, is an external geodesic time. Henceforth, we will denote the geodesic time parameter by s to avoid any potential confusion with spacetime. In all cases, the ‘quantum mechanics-like’ view of \(\psi \) is interpreted with respect to geodesic time.
An outline of the paper is as follows. Section 2.1 recaps the QRG formalism in general, followed by the construction of quantum geodesics at that level in Sect. 2.2. We then turn in Sect. 3 to the QRG formalism in the graph case. The first order of business is that in general a quantum Levi-Civita connection (QLC) need not exist for a given metric (and if it does it need not be unique). There are some different approaches to address this, such as in [3, 11], but the approach we take, which works in some generality, is the line in [6] [5, Chap. 8.4] to work more generally with hermitian metrics, where there are always plenty of hermitian metric compatible connections. A hermitian metric and the usual notion of a metric in [5] are related by \(*\), and a \(*\)-preserving hermitian metric compatible connection is necessarily metric compatible in the usual way. We see in the graph case how this plays out and use this method to fully solve the problem for an n-leg star graph, finding QLC’s for \(n\le 4\). For \(n=2\), the moduli of connections has a free phase parameter. For \(n=3\), there is a unique choice of a phase or its conjugate (two connections) and for \(n=4\) there is a unique connection corresponding to phase \(-1\). We also have the same feature as in [2] for the Dynkin \(A_n\) graph \(\bullet \)–\(\bullet \cdots \bullet \)–\(\bullet \) that the metric lengths \(g_{x\rightarrow y}, g_{y\rightarrow x}\) for each edge cannot be chosen independently but in a certain fixed ratio, in our case a factor of \(\sqrt{n}\) in the inbound direction. We then turn in Sect. 4 to how quantum geodesics look in the graph case and in Sect. 5 specifically for the 4-leg star case.
In Sect. 6, we revisit the particularly nice class of Cayley graphs, where the vertices form a group G and arrows are given by right translation from among a set of generators \({\mathcal {C}}\). That these correspond to left-invariant calculi \(\Omega ^1\) and bicovariant ones when \({\mathcal {C}}\) is ad-stable is immediate from [31] and also featured in early works such as [14, 18, 25]. We assume that the bimodule connection in this case is of a certain ‘inner’ form [5, 27] and then look at quantum geodesics on Cayley graphs. We end in Sect. 7 with the important example of \(G=\mathbb {Z}\) for a generic edge-symmetric metric. The case of geodesics for a constant flat metric on \(\mathbb {Z}\) was recently studied in [10] and on \(\mathbb {Z}_3\) in the original paper [4].
2 Preliminaries: \(*\)-algebraic formalism
We recap the formalism of quantum Riemannian geometry from [5] and references therein, and then of quantum geodesics from [4, 8, 9]. We will be interested in the graph case but it is important that our constructions are not ad hoc, merely a specialisation of a general framework.
2.1 Recap of QRG formalism on an algebra
A differential structure on a unital algebra A is an A-bimodule \(\Omega ^1\) of differential forms equipped with a map \(\textrm{d}:A\rightarrow \Omega ^1\) obeying the Leibniz rule
and such that \(\Omega ^1\) is spanned by elements of the form \(a\textrm{d}b\) for \(a,b\in A\). This can always be extended to a full differential graded ‘exterior algebra’ though not uniquely (but with a unique maximal one). In the \(*\)-algebra setting, we say that we have a \(*\)-differential structure if \(*\) extends to \(\Omega \) (or at least \(\Omega ^1\)) as a graded involution (i.e. with an extra minus sign on swapping odd degrees) and commutes with \(\textrm{d}\). Such \(*\)-differential structures are common to other approaches to noncommutative geometry, including [16].
A full formalism of quantum Riemannian geometry in this setting can be found in [5]. In particular, a metric means for us is an element \(\mathfrak {g}\in \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) which is strongly invertible in the sense of a bimodule map \((\ ,\ ):\Omega ^1\mathop {{\otimes }}_A\Omega ^1\rightarrow A\) obeying the usual requirements as inverse to \(\mathfrak g\). This assumption forces \(\mathfrak g\) in fact to be central and can be relaxed, for example, by not requiring \((\ ,\ )\) to descend to the tensor product over A and working with this ‘round-bracket metric’. Next, working with \(\mathfrak g\), a QLC or quantum Levi-Civita connection is a bimodule connection \((\nabla ,\sigma )\) on \(\Omega ^1\) which is metric compatible and torsion-free in the sense
for a left bimodule connection \(\nabla :\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) characterised by
where the ‘generalised braiding’ bimodule map \(\sigma :\Omega ^1\mathop {{\otimes }}_A\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) is assumed to exist and is uniquely determined by the second equation. We also require \(\mathfrak {g}\) to be ‘real’ and the QLC \(\nabla \) to be \(*\)-preserving, i.e.
Note that torsion-free and \(*\)-preserving imply, respectively, for \(\sigma \) that
and note that the latter implies that \(\sigma \) is invertible. If these hold without necessarily the full conditions for \(\nabla \) itself, then we say that the connection is, respectively, torsion compatible and \(*\)-compatible. The former says that \(T_\nabla \) is a right A-module map and hence a bimodule map as it is already a left A-module map.
There is an analogous theory of right bimodule connections with left and right swapped. In this paper, we will work as usual in [5] with a left connection on \(\Omega ^1\). We also have recourse to \(\mathfrak {X}= _A\hom (\Omega ^1,A)\), the space of left quantum vector fields defined as left A-module maps \(X: \Omega ^1\rightarrow A\). This has a bimodule structure
for all \(\omega \in \Omega ^1\) and \(a,b\in A\), and inherits a right connection. Similarly, for right vector fields \(\hom _A(\Omega ^1,A)\).
Finally, a hermitian metric on an A-bimodule E is a bimodule map \(\langle \ ,\ \rangle :E\mathop {{\otimes }}\overline{E}\rightarrow A\) where we denote by \(\bar{E}\) the same set as E but the conjugate action of the field \(\mathbb {C}\) and of A,
for all \(a\in A\), where \(\bar{e}\) denotes \(e\in E\) when viewed in \(\bar{E}\). A left (bimodule) connection \(\nabla _E:E\rightarrow \Omega ^1\mathop {{\otimes }}_A E\) on E defines canonically a right (bimodule) connection \( \nabla _{\bar{E}}:\bar{E}\rightarrow \bar{E}\mathop {{\otimes }}\Omega ^1\) by

This also works just for a left connection giving a right connection. Then \(\nabla _E\) is hermitian metric compatible if
The case of immediate interest is \(E=\Omega ^1\) and \(\nabla _E=\nabla \). Here a hermitian metric and a round-bracket metric are equivalent data via \((\ ,\ )=\langle \ ,(\ )^*\rangle \). We do not assume for the moment that either side descends to \(\mathop {{\otimes }}_A\), but we do require non-degeneracy, which amounts to the map \(\omega \mapsto (\ ,\omega )\) being a linear isomorphism \(\mathfrak {g}_2:\Omega ^1\rightarrow \mathfrak {X}\) . Next, we let \(\Omega ^1\) be finitely generated projective (f.g.p.) with left bases \(\{e^i\},\{e_i\}\) and associated A-valued projection matrix \(P_{ij}=\textrm{ev}(e^i\mathop {{\otimes }}e_j)\), and we let \(g^{ij}=\langle e^i,\overline{e^j}\rangle =(e^i,(e^j)^*)\) be an A-valued matrix g. The initial metric being hermitian is equivalent to \(g^\dagger =g\), where \((\ )^\dagger \) denotes transpose and application of \(*\), as for hermitian conjugation of a matrix. The associated lower index matrix \(\tilde{g}=(g_{ij})\) is uniquely determined by
and obeys [5, Prop. 8.31]
There is an associated \(\mathfrak g=g_{ij}e^i\mathop {{\otimes }}_A e^j\) relevant to the QRG as above. If \((\ ,\ )\) descends to \(\mathop {{\otimes }}_A\), then this is central, but we do not need to assume this. Then a left connection, written as \(\nabla e^i=-\Gamma ^i _j\mathop {{\otimes }}e^j\) for a 1-form valued matrix \(\Gamma \), is hermitian metric compatible if and only if
as in [5, Def. 8.38], and we solve this with
for some 1-form valued matrix N as stated. This means that hermitian metric compatible connections always exist.
In terms of \((\ ,\ )\), hermitian metric compatibility amounts to
If \(\nabla \) is a \(*\)-preserving bimodule connection and \((\ ,\ )\) descends to \(\mathop {{\otimes }}_A\) such that
then this is equivalent to the usual
which in turn is equivalent to \(\nabla \mathfrak g=0\), see [5, Lemma 8.4]. Here (4) expresses metric compatibility as \((\ ,\ )\) intertwining \(\textrm{d}\) and the tensor product bimodule connection, which implies (3).
Thus, a natural approach to solving for a QLC is to first solve for hermitian-metric compatibility and then ask for which solutions are bimodule connections, torsion-free, \(*\)-preserving and for which \(\sigma \) obeys (3). In our case of an inner calculus (in the sense that \(\textrm{d}=[\theta ,\ ]\) for \(\theta \in \Omega ^1\) with \(\theta ^*=-\theta \)), this is not necessarily best done by solving for N in the above but rather by a theorem [27] [5, Thm 8.11] that if \(\Omega ^1\) is inner, then a left bimodule connection has the specific form
for some bimodule maps \(\sigma :\Omega ^1\mathop {{\otimes }}_A\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) and \(\alpha :\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\).
Finally, for a quantum metric, it is usual to impose some form of symmetry. Three notions here are:
-
(1)
Quantum symmetry \(\wedge (\mathfrak {g})=0\);
-
(2)
\(\sigma \)-Symmetry \((\ ,\ )\circ \sigma =(\ ,\ )\) (for the pair \((\mathfrak {g},\nabla )\));
-
(3)
Edge symmetry in the graph case (see below).
We do not necessarily impose any of these, i.e. we are more precisely working with nondegenerate ‘generalised metrics’. Focussing on \((\ ,\ )\) (or its hermitian version as we do) without necessarily assuming descent to \(\mathop {{\otimes }}_A\) is also a line taken in other works such as [3], but our main examples in the present work do in fact descend to standard QRG aside from the symmetry. Non-edge-symmetric metrics in QRG are of interest even for \(\mathbb {Z}_n\), as shown in [12].
2.2 Recap of quantum geodesics on an algebra
We do not repeat here the origins of the theory in the 2-category of A-B-bimodules with bimodule connections, but rather just give the resulting equations for quantum geodesics.
The data we need on a differential algebra \((A,\Omega ^1,\textrm{d})\) are first of all a left bimodule connection \(\nabla :\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) which can be any bimodule connection on \(\Omega ^1\), but for the geometric case could be a QLC or WQLC [5] with respect to a quantum metric as in Sect. 2.1. We assume that \(\Omega ^1\) is finitely generated and projective. Then the bimodule of left vector fields \(\mathfrak {X}\) acquires a dual right connection
characterised by
for all \(\omega \in \Omega ^1\) and \(X\in \mathfrak {X}\). In the inner case where \(\nabla \) is given by (5), we can give this more explicitly as follows.
Lemma 2.1
For an inner calculus and \(\Omega ^1\) f.g.p. with dual bases \(\{e^i\},\{e_i\}\), the dual bimodule connection can be given explicitly by
(here \(\textrm{coev}(1)=e_i\mathop {{\otimes }}e^i\in \mathfrak {X}\mathop {{\otimes }}\Omega ^1\), summation implicit).
We can equally well formulate metric compatibility of \(\nabla \) in terms of \(\nabla _\mathfrak {X}\). If \(\sigma \) is invertible and \(\nabla \) is metric compatible then using (3), we also have a ‘mixed’ form of metric compatibility that the map \(\mathfrak {g}_2\) intertwines the right bimodule connections \(\nabla _\mathfrak {X}\) and \(\sigma ^{-1}\circ \nabla \),
where the second half follows from the first half as a morphism of bimodule connections.
Next, for any right connection \(\nabla _\mathfrak {X}\) with \(\sigma _\mathfrak {X}\) is invertible, \(\hat{\nabla }=\sigma _\mathfrak {X}^{-1}\nabla _\mathfrak {X}\) with \(\hat{\sigma }=\sigma _\mathfrak {X}^{-1}\) is a left bimodule connection on \(\mathfrak {X}\), which allows us to define a divergence of \(X\in \mathfrak {X}\) as
for all \(\omega \in \Omega ^1, X\in \mathfrak {X}\). Here \(\textrm{ev}\) is a bimodule map and one can check that
Moreover, if \(\nabla \) is metric compatible with \(\sigma \) invertible, then we can use (6) to find
on substituting both halves of (6). So in the metric compatible case, the divergence of a vector field matches the natural codifferential of the corresponding 1-form.
We are now ready for quantum geodesics. Although the theory is more general, we will focus on ‘wave functions’ \(\psi \in E=C^\infty (\mathbb {R}, A)\), where \(s\in \mathbb {R}\) will be the ‘geodesic time’ parameter. Likewise, we let \(X_s\) be a time-dependent vector field on A and \(\kappa _s\) another time-dependent element of A. These obey the geodesic velocity equations if
where dot means differential with respect to s.
Next, we require \(\int : A\rightarrow \mathbb {C}\) to be a non-degenerate positive linear functional (so we can think of it as a probability measure if normalisable so that \(\int 1=1\)) and define \(\textrm{div}_{\int }(X)\) of a vector field by
for all \(a\in A\). If this is the same as the geometric divergence, then we say that \(\int \) is divergence compatible (with \(\nabla \)), which is equivalent to
for all \(X\in \mathfrak {X}\). We do not necessarily assume this, however, as it can be quite restrictive in noncommutative geometry. We do require that the geodesic velocity field and \(\kappa \) at each s obey the unitarity conditions
for all \(a\in A\) and all \(\omega \in \Omega ^1\). Note that if the second equation holds (one says that X is real with respect to \(\int \)), then we can canonically solve the first equation in the pair by \(\kappa ={1\over 2}\textrm{div}_{\int }(X)\), see after [9, Def. 4.5]. It is not automatic that if \(X_s\) is initially real with respect to \(\int \) that it necessarily remains so under the geodesic velocity equation. We have to impose this as a further ‘improved auxiliary equation’ obtained as the difference between (8) and its conjugate under the reality assumption. It may be that this is not possible, in which case one can always add a time-dependent driving force \(F\in \mathfrak {X}\) to (8) for which a natural choice is to take \(\textrm{i}F\) real with respect to \(\int \) also. This then uniquely defines F as an external force needed to maintain X real with respect to \(\int \) as it evolves. The improved auxiliary equation appears in this extended framework as \(F=0\). We will see how this greater freedom plays out in the graph case.
Given such a geodesic velocity vector field, we then require the amplitude flow equation
where \(\textrm{d}\) acts on \(\psi (s)\in A\) and dot is with respect to s as before. The above conditions ensure that \(\int \psi ^*\psi \) is constant in time, which is needed for a probabilistic interpretation.
We also assume that \(\Omega ^1\) is a \(*\)-calculus and \(\nabla \) is \(*\)-preserving. In the nicest case, there is also a \(*\) operation on \(\mathfrak {X}\), namely [9] when \(\int \) is a (twisted) trace in the sense
for all \(a,b\in A\) with respect to an algebra automorphism \(\varsigma \) that extends to a map \(\varsigma :\Omega ^1\rightarrow \Omega ^1\) by \(\varsigma (a.\textrm{d}b)=\varsigma (a).\textrm{d}\varsigma (b)\).
Theorem 2.2
[9] If a positive linear functional \(\int \) is a twisted trace with respect to \(\varsigma \) then \(*\) on \(\mathfrak {X}\) defined by
for all \(\omega \in \Omega ^1\) obeys
for all \(a\in A, X\in \mathfrak {X}\). If in addition, \(\int \) is divergence compatible, X is ‘real’ in the sense \(X^*=\varsigma \circ X\circ \varsigma ^{-1}\) and
as before then the unitarity conditions (9) hold.
One also has
in the case of real X in the sense stated. We therefore impose this reality condition on X (which for a trace just means \(X^*=X\)). It amounts to the same as imposing reality of X with respect to \(\int \) but now with a geometric meaning behind that as self-adjoint with respect to an involution. This nice setting is, however, quite restrictive and does not always apply. On solving the geodesic velocity equations, we again want an initially real \(X_s\) to remain real and can impose this as an auxiliary condition or more generally ensure it automatically by a generated imaginary driving force F.
3 QRG formalism applied to graphs
Here, we develop the quantum Riemannian geometry of graphs, building on [27] but now coming at it from the more general framework of hermitian metric compatible connections as in [6]. If \(A=C(X)\) is the algebra of all complex-valued functions on a discrete set X, then its possible \(\Omega ^1\) are known to be in 1-1 correspondence with directed graphs with vertex set X, where we exclude self-arrows and multiple arrows. So a graph is just a discrete set with differential structure of order 1. We shall abuse notation by using \(x\rightarrow y\) both as an arrow in the graph and as a logical statement ‘there is an arrow from x to y’. The associated calculus has 1-forms spanned as a vector space by the arrows, or equally with basis \(\{\omega _{x\rightarrow y}\}\) labelled by arrows. The bimodule structure and exterior derivative are
This forms a \(*\)-calculus with \(f^*(x)=\overline{f(x)}\) and \(\omega _{x\rightarrow y}^*=-\omega _{y\rightarrow x}\) in the case that the graph is bidirected (where every arrow has a reverse arrow). Since \(*\) is central to the present paper, we only work with such bidirected graphs, or equivalently with undirected graphs viewed as bidirected. The calculus is inner with \(\theta =\sum _{x\rightarrow y}\omega _{x\rightarrow y}\). The finite difference derivative is the standard one on graphs [15], but the bimodule structure puts us into the domain of noncommutative geometry with many new tools beyond the graph Laplacian itself.
We will also need higher degree forms and the most natural one that is functorial (i.e. defined for all graphs) is
where we add the quadratic relations shown. This is explained in [5, Chap 1] as a natural quotient of the maximal prolongation that remains inner by \(\theta \) in all degrees. Here again, we stay within the context of an exterior algebra, which necessarily differs from a more usual approach in graph theory using simplicial complexes (see for example [20]).
A hermitian metric in this context and in the simplest case where it descends to \(\mathop {{\otimes }}_A\) is given by coefficients \(\lambda _{x\rightarrow y}\in \mathbb {R}\setminus \{0\}\) on the arrows and has the form
with the natural choice being \(\lambda _{x\rightarrow y}>0\). Here the \(\delta _{x,z}\) is given by the inner product being a bimodule map, and the \(\delta _{y,w}\) comes from the assumption of descent to \(\mathop {{\otimes }}_A\). This corresponds via \(*\) to a usual metric
where the natural choice with \(\lambda _{x\rightarrow y}>0\) is for metric coefficients here to be negative. This is a little counter-intuitive but fits with \(\omega _{x\rightarrow y}^*=-\omega _{y\rightarrow x}\). The requirement of a bimodule map inverse forces \(\mathfrak {g}\) to be central and this in turn needs \(x=x'\), in contrast to early attempts at discrete Riemannian geometry such as [18]. Also note that for constructing a QLC, we do not care about the overall normalisation of the metric so from the non-hermitian point of view we would normally omit this minus sign.
Next, since the graph calculus as well as \(\Omega _{\min }\) are inner, we can use the form (5) from [27] [5, Thm. 8.11] for any bimodule maps \(\sigma :\Omega ^1\mathop {{\otimes }}_A \Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) and \(\alpha :\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\). To this, we add the idea that hermitian metric compatible ones always exist [5, Chapter 8.4] so it is easier to solve for these first and then require \(*\)-preserving and torsion-freeness. We say that \(\nabla \) is inner if \(\alpha =0\).

Configurations in the undirected graph defining N and L in Prop. 3.1, viewed as bidirected
Proposition 3.1
For nondegenerate metrics (i.e. all \(\lambda _{x\rightarrow y}\ne 0\)), there is a 1–1 correspondence between hermitian metric compatible left bimodule connections on \(\Omega ^1\) and the following data:
(1) \(N_{ x\rightarrow y , z\rightarrow y }\in \mathbb {C}\) for all triangles in Fig. 1 obeying \(N_{ x\rightarrow y , z\rightarrow y } ^*=N_{ z\rightarrow y , x\rightarrow y }\).
(2) \(L_{ x\rightarrow y , z\rightarrow u }\in \mathbb {C}\) for all squares in Fig. 1 obeying \(L_{ x\rightarrow y , z\rightarrow u } ^*=L_{ z\rightarrow u, x\rightarrow y }\). Note that the squares are allowed to collapse diagonally opposite vertices, i.e. we can have \(z=y\) or \(x=u\).
The connection is then defined by (5) using
Proof
If we set \(K=\alpha -\sigma _\theta \), where \(\sigma _\theta (\omega )=\sigma (\omega \mathop {{\otimes }}\theta )\), then a general left connection on \(\Omega ^1\) can be written
where we write the left module map K in terms of the basis as
which we can also split as in [27] as
The \(\alpha \) terms are only possible if \(x\rightarrow y\) can be made into a triangle by \(x\rightarrow z\rightarrow y\), and the \(\sigma \) terms are only possible if \(x\rightarrow y\rightarrow u\) can be made into a square by \(x\rightarrow z\rightarrow u\), but this also needs to include the cases \(x=u\) or \(y=z\) or indeed both of these at once. This structure of terms is forced by \(\alpha ,\sigma \) being bimodule maps and the \(\mathop {{\otimes }}_A\). Next, for a given basis order of the directed arrows \(x\rightarrow y\) we can make K into a matrix (with entries zero outside the ranges in (12)) and also let G be the hermitian diagonal matrix with entries \(\lambda _{x\rightarrow y}\in \mathbb {R}\). Now hermitian metric compatibility is given by the matrix KG being hermitian. If G is invertible (i.e. all \(\lambda _{x\rightarrow y}\ne 0\)), then all solutions of this are of the form \(K=GM\) for M a hermitian matrix. This has two types of terms, denoted N, L in the statement. \(\square \)
We use the relations for \(\Omega ^2_{\min }\). Note that if we were to add more relations into the calculus, then the conditions for a torsion-free connection will typically be weakened.
Proposition 3.2
Hermitian metric compatible connections in Proposition 3.1 are torsion compatible precisely when
holds for every nondegenerate square in the graph (see Fig. 1). In this case, the connections are given in terms of an assignment \(Q_{x\rightarrow y}\in \mathbb {C}\) for every directed edge with \(Q_{x\rightarrow y} ^*=Q_{y\rightarrow x}\) and
In addition, the torsion for \(\Omega _{\min }\) vanishes precisely when \(\alpha \) is of the form
for some real function \(b_y\) on the vertices, i.e. \(N_{ x\rightarrow y , z\rightarrow y }=b_y\).
Proof
First write
We require that the following is in the kernel of \(\wedge \)
which requires that the bracketed expression on the right must be independent of z. Hence, we set
Now the hermitian condition on the Ls gives for every square
On totally degenerate squares (a single edge given by putting \(z=y\) and \(u=x\)), we get
and to solve this we put \(M_{xyx}=g_{y\rightarrow x} +Q_{x\rightarrow y}\) where \(Q_{x\rightarrow y} ^*=Q_{y\rightarrow x}\). Next we look at the singly degenerate square where \(z=y\) and \(u\ne x\) to find
and at the singly degenerate square where \(z\ne y\) and \(u=x\) to find
On changing the letters, these are seen to give the same information. Now we have the nondegenerate squares which on substitution of our previous results into (15) give \(M_{xyu}=M_{zuy}^*\) and this gives (14). Next we check that the resulting L is hermitian, i.e.
which we reorder as
and which gives no new information. From the formula for \(\alpha \) in (11), we see that torsion-free implies that \(N_{ x\rightarrow y , z\rightarrow y }\) is independent of z. Then the hermitian condition on N shows that it is also independent of x. \(\square \)

Configurations in the undirected graph for Prop. 3.3, viewed as bidirected
Proposition 3.3
Given a hermitian metric compatible connection on a graph, \(*\)-compatibility (i.e. \(\sigma \,\dagger \,\sigma \,\dagger =\textrm{id}\)) reduces to
where Fig. 2a shows the configurations of the points (which may be degenerate). If this holds, then the connection is \(*\)-preserving if and only if
where Fig. 2b shows the configurations of the points. If this holds and the connection is also torsion-free as in Proposition 3.2, then we have a QLC in the usual (non hermitian) sense for the corresponding round-bracket metric.
Proof
It is known [5, Prop. 8.11] that if \(\nabla \) is \(*\) compatible, then the inner part is also \(*\)-preserving hence for the connection to be \(*\)-preserving in the presence of \(\alpha \) we just need \(\sigma \,\dagger \,\alpha (\xi ^*)=\alpha (\xi )\), which reduces as shown for \(\xi =\omega _{y\rightarrow x}\). The last part follows from our general comments in Sect. 2.1. \(\square \)
In both propositions, one can set \(\alpha =0\) so full torsion-freeness and \(*\)-preserving hold for such inner connections as soon as they are torsion and \(*\)-compatible. This applies similar to all inner calculi [5, Prop. 8.11].
3.1 QRG of star graphs
We consider the n-star graph with n vertices labelled \(\{1,2,\dots ,n\}\) joined to a central vertex labelled 0 as shown in Fig. 3. We use the notation \(i,j,k\in \{1,2,\dots ,n\}\) for the exterior vertices.

n-Star graph which we decorate with metric values \(g_{ i\rightarrow 0}=\lambda ^{-1}_{0\rightarrow i}\) and \(g_{0 \rightarrow i}=\lambda ^{-1}_{i\rightarrow 0}\) for \(i\in \{1,2,\cdots n\} \) on the arrows
Theorem 3.4
For the n-star graph, hermitian metric compatible and \(*\)-compatible connections exist only if
and are necessarily \(*\)-preserving with \(\alpha =0\). Using \(\Omega _{\min }\), torsion-free such connections are the moduli of QLCs and exist only for \(n\le 4\). They consist of (a) solutions
up to complex conjugation (i.e. 2 connections for each n), where \(s_k\) is independent of k, and (b), when \(n=2\), more general solutions with
Here, \(s_1\) is a free phase parameter and \(s_2\) is obtained from \(s_1\) by a Möbius transform that maps phases to phases and has the special values in (a) as its fixed points. Moreover, \(L_{j\rightarrow 0,0\rightarrow k}=L_{0\rightarrow k,j\rightarrow 0} ^*\) fully specifies \(\sigma \).
Proof
From Proposition 3.3, we have the two conditions, for \(i,j,k\in \{1,2,\dots ,n\}\)
Note that we must have non-vanishing L’s from the second equation. Substituting one condition into the other gives for all i, j
In the case where \(i=j\), the ratio of the Ls cancels and it follows that the fraction \( \frac{\lambda _{0\rightarrow i}}{ \lambda _{i\rightarrow 0} }\) is independent of i, and we can solve to find the first stated condition. Now for \(i\ne j\) we have the restriction
We then have \(L_{j\rightarrow 0,0\rightarrow k}=L_{0\rightarrow k,j\rightarrow 0} ^*\) and \(\alpha =0\). Note that so far we have used a subset of the metric preserving relations, but if solutions exist then by [5, Thm 8.11], due to the calculus being in the inner case, they have a form given by \(\sigma \) and a bimodule map \(\alpha \). The latter, however, must be zero since there are no triangles in the graph. In this case, \(*\)-compatible implies \(*\)-preserving.
Next, proceeding with this partial solution for Ls, torsion compatibility (which in the present inner case is equivalent to torsion-freeness) becomes
and substituting this in the sum (20) gives for all \(i\ne j\),
The solutions of this simplify when \(n\ne 2\) as we can show that \(Q_{0\rightarrow 2}/g_{2\rightarrow 0} =Q_{0\rightarrow 1}/g_{1\rightarrow 0} \). In this case, the solutions are, using the same choice of sign \(\epsilon =\pm 1\) for all i,
which simplifies to
Proposition 3.2 then gives us
which we write as stated. Now we check consistency with the remaining relations, which can be summarised by, for \(i\ne j\),
These can be checked to hold for \(n=3,4\) and fail for \(n\ge 5\). In the \(n=2\) case, (21) becomes
and solving this for \(Q_{0\rightarrow 2}/g_{2\rightarrow 0} \) in terms of \(Q_{0\rightarrow 1}/g_{1\rightarrow 0} \) gives the solution as stated. \(\square \)
For the type (a) solutions, if we write \(s=s_k\) for the common value, then \(\sigma \) in Theorem 3.4 comes out uniformly as
for all \(j\ne i\). The associated connection, which is necessarily of inner type governed by \(\sigma \), is
We can potentially have more \(*\)-preserving solutions, e.g. for larger n, if we quotient \(\Omega _{\min }\) further so that being torsion-free is less restrictive.
Remark 3.5
The \(n=2\) case is the same as the \(A_3\) Dynkin graph \(\bullet \)–\(\bullet \)–\(\bullet \) treated in [2] and a careful comparison noting that the metric coefficients there relate to ours by
shows that our constraints on the ratios of inbound and outbound metric coefficients are the same as found there. We also obtain exactly the same connection \(\nabla \) as in [2] with \(s=s_1\) as the free modulus 1 parameter found there.
4 Quantum geodesics on finite graphs
We now follow through the formalism from Sect. 2 for quantum geodesics, in the graph case. We let \(\chi _{y\leftarrow x}\) be the element of the dual basis with support on \(\omega _{x\rightarrow y}\) and with respect to this we let \(X=\sum X^{r\leftarrow s}\, \chi _{r\leftarrow s}\) to define the coefficients of a vector field. From Lemma 2.1 and substitution of the forms of \(\sigma \) and \(\alpha \) in the graph case, we have \(\nabla _\mathfrak {X}\) in terms of the L, N as
where the sums for L, N are over the patterns (possibly degenerate) given in Fig. 4. It then follows that
as needed for the geodesic velocity equations.

Configurations in the undirected graph defining N and L in equation (22), viewed as bidirected
Next, we consider \(\int \) of the form
for all functions f on the vertex set, with ‘measure’ \(\mu :X\rightarrow \mathbb {R}\setminus \{0\}\) so that \(\int \) is hermitian and non-degenerate. We preferably also want \(\mu \) to be positive for the usual interpretation of the amplitude flow.
From the definitions, it is immediate that a vector field X is real with respect to \(\int \) (i.e. the second half of (9) holds) if and only if
Likewise, it is immediate that
It then follows that
as also needed for the geodesic velocity equation when we set \(\kappa ={1\over 2}\textrm{div}_{\int }(X)\). We put these results together and add the possibility of a driving force \(F\in \mathfrak {X}\).
Proposition 4.1
On a graph, the geodesic velocity equation with driving term \(F\in \mathfrak {X}\) is
Requiring that X is real with respect to \(\int \) and stays so simultaneously imposes
Proof
We use (26) and (23) to write the geodesic velocity equations in (8) as stated. Next we conjugate this equation and suppose that X is real with respect to \(\mu \) as in (24) to obtain the second equation. \(\square \)
The difference between two equations stated in Proposition 4.1 can be viewed as an ‘improved auxiliary equation’ that ensures that evolution stays real with respect to \(\int \). Setting \(F=0\) is the standard approach in [9], while now we will make the minimal assumption that F is imaginary but is otherwise prescribed by the requirement to maintain real evolution for X. Finally, given a geodesic velocity field X, we have the amplitude flow
where \(\textrm{div}_{\int }\) is the function in (25).
The above is the basic framework where \(\mu \) is arbitrary. Usually, we would take the measure adapted to the geometry and the natural way to do this is to ask further that \(\int \) is divergence compatible. Then we have a further structure of a \(*\) operation on vector fields.
Proposition 4.2
For a connection (22), the geometric divergence as in Sect. 2.2 is
and \(\int \) is divergence compatible with respect to this if
In this case, the canonical \(*\) on \(\mathfrak {X}\) is
Proof
Starting with
we use (6) to find
and so \(\tilde{\textrm{ev}}:=\textrm{ev}\circ \sigma _\mathfrak {X}^{-1}\) is
Next, we observe that for any connection on an inner calculus, we have
for dual bases, which in our case means \(\textrm{coev}(1)=\sum _{r,s}\chi _{r\leftarrow s}\mathop {{\otimes }}\omega _{s\rightarrow r}\). This gives the formula for \(\textrm{div}(\chi _{p\leftarrow q})\) stated on noting that the \(\alpha \) term does not contribute. From this, the divergence compatibility immediately follows.
Finally, for \(*\) on a basis vector, we compute
which implies the result stated. \(\square \)
In our case of \(\varsigma =\textrm{id}\), it is shown in [9] that \(X=X^*\) is the same as X being real with respect to \(\int \), so we are solving the same pair of equations as in Proposition 4.1 but have more structure underlying the reality condition. In the other hand, this case can be quite restrictive.
5 Quantum geodesics on the 4-star graph
We now apply the theory above to the n-star, proceeding from the pair of equations in Proposition 4.1. In fact, it is sufficient to set \(x=0\) (setting \(y=0\) gives the conjugate equation which we impose anyway), so we have to solve the velocity equation
and, for X to remain real with respect to \(\int \), at the same time
The difference of these is the ‘improved auxiliary condition’
which simplifies to
We now suppose that \(n=4\) and that \(\nabla \) is the QLC as found in Theorem 3.4. Here \(s=-1\) and the auxiliary equation becomes
If we assume F is imaginary with respect to \(\int \), then this amounts to requiring
We interpret F as an external force defined by this and needed so as to keep X real with respect to \(\int \) during the evolution.
Proposition 5.1
With the driving term (28), the geodesic velocity equation on the 4-star becomes
for four complex fields \(X^{0\leftarrow i}\).
Proof
We now put the found F into our original geodesic velocity equation to give
for the value of L, which we write as shown. \(\square \)
Example 5.2
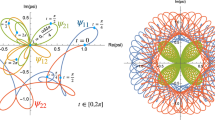
Figure 5 shows solutions for the geodesic velocity equation on the 4-star graph for constant \(\lambda _{0\rightarrow i}\) (independent of i), constant \(\mu \) and initial \(X^{0\leftarrow i}(0)=\delta _{i,1}\). A special feature of \(n=4\) (not true for \(n=2,3\)) is that both the velocity and amplitude coefficients remain real numbers if they start real, so we stick to this for simplicity. For the constant measure case, we then have \(X^{i\leftarrow 0}=-X^{0\leftarrow i}\) at all s for reality with respect to \(\int \). The velocity equation for the stated initial conditions then reduces to
which is solved by
where the \(\tan \) first blows up at \(s={8\pi \over 3\sqrt{3}}\). We also compute
which gives the amplitude flow equations (27) as
The numerical solution for this is plotted for initial \(\psi _1(0)=1\) and zero elsewhere. Here \(|\psi |^2_x\) is the probability to find a particle at vertex x and we see that this shifts from outer vertex \(x=1\) to the central vertex \(x=0\) and then equally to the other outer vertices \(x=2,3,4\). It then continues to shift back and forth in an oscillatory fashion between 0 and the outer vertices in unison and with divergent frequency as we approach the singularity at \(s={8\pi \over 3\sqrt{3}}\). One can check that \(\sum _x |\psi _x|^2=1\) for all s to within machine precision.

Example 5.2 of quantum geodesic flow on the 4-star graph. The geodesic velocity field has initial value \(X^{0\leftarrow 1}=1\) only, and its components blow up in a finite time \(s_{\max }={8\pi \over 3\sqrt{3}}\). We plot the amplitude flow \(\psi _x\) where \(|\psi _x|^2\) is the probability to find the particle at vertex x. The 3D visualisation puts the central vertex 0 at (0, 0), the outer vertices at \((\pm 1,0),(0,\pm 1)\) and Gaussian interpolates the values of \(|\psi |^2\). We see the particle starting at outer vertex (1, 0), moving to (0, 0) and then moving to the three other outer vertices. It then increasingly rapidly oscillates between the external nodes in unison and the centre
Moreover, since this is a unitary evolution, there is necessarily an effective time-dependent Hamiltonian; namely, we can write
(taking \(\psi \) with components \(\psi _0,\psi _1,\psi _2\)). Here at each s, \(H_s\) has one real zero mode and two complex modes,
with eigenvalues \(0,\mp \lambda \), respectively, with \(\lambda \) blowing up as s approaches the end of its range. Our plotted solution starts off real at \(s=0\) as the sum of the two complex modes and then remains real, but a general solution would be complex.
Remark 5.3
In the above, we have not tried to choose \(\int \) to be divergence compatible and instead let \(\mu \) (and \(\lambda _{x\rightarrow y}\)) be arbitrary. If we require divergence compatibility, then for the 4-star this amounts to
for the measure to exist and its resulting form. This means that the \(\lambda \) cannot all be positive, i.e. the metric cannot have ‘Euclidean signature’ everywhere. And we see that the measure is not positive either, which is a problem for the probabilistic interpretation. Aside from these issues, the system itself can be solved similarly to the example.
6 Quantum geodesics on Cayley graphs
In this section, we look at special graphs where the vertices are elements \(x\in G\) of a group (so \(A=\mathbb {C}(G)\)) and arrows are of the form \(x\rightarrow ya\) where \(a\in {\mathcal {C}}\) a finite set of generators. In this case, we define
The calculus is covariant under left translation on the group and \(\{e^a\}\) is as basis of the space \(\Lambda ^1\) of left-invariant 1-forms. Using the commutation relations, it is clear that \(\Omega ^1=A.\Lambda ^1\) as a free module. The calculus is inner and we assume throughout that \({\mathcal {C}}\) is closed under inversion, which case we have a \(*\)-calculus, where
This is an immediate application of the analysis in [31] of left-covariant and bicovariant (i.e. both left and right covariant) on any Hopf algebra, and in our case the above calculus is bicovariant if and only if \({\mathcal {C}}\) is ad-stable. A main result of [31] in the bicovariant case is a canonical choice of exterior algebra, which in the present context (and in a modern formulation [5]) amounts to \(\Omega _\textrm{wor}(G)=A.\Lambda \) where \(\Lambda \) is a certain ‘braided skew symmetrisation’ of \(\Lambda ^1\) defined by a braiding \(\Psi :\Lambda ^1\mathop {{\otimes }}\Lambda ^1\rightarrow \Lambda ^1\mathop {{\otimes }}\Lambda ^1\) defined by \(\Psi (e^a\mathop {{\otimes }}e^b)=e^{aba^{-1}}\mathop {{\otimes }}e^a\). This \(\Omega _\textrm{wor}\) tends to be a natural quotient of \(\Omega _{\min }\) in Sect. 3, which was canonically defined by the graph structure alone. The choice of \(\Omega ^2\) is relevant to torsion-freeness of a QLC or to define a WQLC.
6.1 QRG on Cayley graphs revisited
A hermitian metric on \(\Omega ^1\) has the form
where the natural condition is for \(h^{ab}\) to be a positive hermitian matrix, so here \(h_a>0\), as functions on the group. The diagonal form comes from the observation that the corresponding regular metric g has to be central to have a bimodule inverse. Because of the minus sign in \(e^{a*}\), this is
The edge-symmetric case has \(R_a(g_{a^{-1}})=g_a\), but we do not necessarily assume this. If we are only interested in the round brackets version, we usually omit the minus signs here as in [5, Chap. 1], since the QLC does not depend on the overall normalisation of the metric.
Now consider a left connection on \(\Omega ^1\) of the form
We set matrices \(\Gamma \) and \(\Xi \) with entries in \(\Omega ^1\) to be
so we have \(\Xi =\Gamma +\theta I\) regarded as a 1-form valued matrix, where I is the identity matrix.
Lemma 6.1
A connection on a Cayley graph as in (29) is hermitian metric compatible if and only if the matrix \(\Xi h\) is antihermitian, where we matrix multiply \(h_{ab}\). Given its diagonal form, the condition is

Proof
We use the formula from [5, Def. 8.33]
and the fact that the inner element \(\theta \) is antihermitian. In the case where h is diagonal, this implies

which is the explicit equation stated on moving \(e^c\) to the right in the last expressions. Similarly in the converse direction. \(\square \)
Next, we ask when \(\nabla \) is a bimodule connection. This was answered under the assumption that \(\nabla \) as left invariant so that \(\Gamma ^a _{bc}\) are \(\mathbb {C}\)-valued in [5, Prop. 3.75], but we do not make this assumption.
Proposition 6.2
On a Cayley graph, \(\nabla \) given by (30) is a bimodule connection if and only if
In this case,
in the decomposition (5).
Proof
(1) We calculate
and for this to equal \(\sigma (e^a\mathop {{\otimes }}\textrm{d}\delta _s)\), we require
Now taking \(\delta _{sa^{-1}}\) times this and summing over \(s\in G\) give
from which we derive the requirement
Now taking \(\delta _{sb^{-1}a^{-1}}\) times this and summing over \(s\in G\) gives
as stated, and this formula is supposed to give a bimodule map. Taking \(\delta _{sx^{-1}}\) times (32) for \(a^{-1}x\notin \mathcal {C}\) and summing over \(s\in G\) gives
For \(x=a\), this just gives \(0=0\), and for the remaining case \(a^{-1}x\notin \mathcal {C}\cup \{e\}\) we get
Hence, for a given \(d\in \mathcal {C}\) we get
which gives \(\delta _{dc,x}( \Gamma ^a _{dc}+\delta _{c,a})=0\), which is the condition in the statement. A brief check shows that (31) is then satisfied and that we obtain a bimodule connection by the formula stated.
(2) Next, we compute
where we used (33). The first combined sum is unconstrained but the other sum is constrained, so the difference is a sum over \(a^{-1}cd\notin {\mathcal {C}}\). \(\square \)
We will focus on the inner case where \(\alpha =0\).
Lemma 6.3
A bimodule connection on a Cayley graph is \(*\)-compatible if and only if

and is then \(*\)-preserving if \( \alpha =0 \).
Proof
Using our formula from Proposition 6.2,

and then the \(*\)-compatibility condition is

so for all \(a,b\in \mathcal {C}\) we have the condition stated. Also, if \(\alpha =0\), being \(*\)-compatible implies \(*\)-preserving by [5, Thm. 8.11]. \(\square \)
Similarly, if \(\alpha =0\), for \(\nabla \) to be torsion-free is equivalent to being torsion compatible [5, Thm. 8.11], i.e. the condition \(\wedge (\textrm{id}+\sigma )=0\), or explicitly
for all \(a,b\in {\mathcal {C}}\). The wedge product here depends on \(\Omega ^2\), e.g. for the Woronowicz exterior algebra when the calculus is bicovariant, it means the same expression with \(\mathop {{\otimes }}\) in place of \(\wedge \) needs to be invariant under \(\Psi \). For \(G=S_3\), there is a 1-parameter family of left-invariant \(*\)-preserving WQLCs [6, Prop. 6.12].
Finally, if \(\nabla \) is given by (29), we will need the associated right connection \(\nabla _\mathfrak {X}\) on vector fields. Here we let \(\{f_a\}\) be a dual (right) basis to the (left) basis \(\{e^a\}\) in the sense \(f_b(e^a)=\textrm{ev}(e^a\mathop {{\otimes }}f_b)=\delta ^a _b\). A general vector field here is \(X= f_a X^a \in \mathfrak {X}\). Then
with braiding \(\sigma _\mathfrak {X}:\Omega ^1\mathop {{\otimes }}_A \mathfrak {X}\rightarrow \mathfrak {X}\mathop {{\otimes }}_A \Omega ^1\) given by
resulting in
6.2 The integral state and divergence
As for any graph, we define a state \(\int f=\sum _{x} \mu _x f(x)\) for some non-vanishing and preferably positive weight function \(\mu :G\rightarrow \mathbb {R}\setminus \{0\}\). In this case, the associated divergence is computed from
so that
which on a basis vector is just \(\textrm{div}_{\int } (f_d )= 1- R_{d^{-1}}(\mu ) \mu ^{-1}\). Moreover, a vector field X is defined as real with respect to \(\int \) if the second half of the ‘unitarity’ condition (9), which amounts to

and gives \(\int (\delta _x X^{a*})=-\int (\delta _{x a}X^{a^{-1}})\) or
for all \(a\in {\mathcal {C}}, x\in G\) as the condition to be real with respect to \(\int \). In this case, \(\kappa ={1\over 2}\textrm{div}_{\int }(X)\) is real valued and ensures the other half of (9).
We can then proceed to quantum geodesics on groups for any measure, but as in [9] a natural choice is to ask for \(\int \) to be divergence compatible in the sense \(\int \textrm{div}(X)=0\) for all \(X\in \mathfrak {X}\), or equivalently that \(\textrm{div}_{\int }=\textrm{div}\).
Proposition 6.4
If \(\nabla \) is metric compatible and inner then the geometric divergence of a left vector field X is
and \(\int \) is divergence compatible if and only if
In this case, the induced \(*\)-operation on \(\mathfrak {X}\) is

Proof
The corresponding 1-form to the left vector field X via metric is
where \(\mathfrak {g}=\mathfrak {g}^1\mathop {{\otimes }}\mathfrak {g}^2\) is a notation for the two tensor factors (sums of such terms understood). Then by (7),
which we write as stated. Then
since we could apply \(R_a\) to the first term given the \(\sum _G\). For this to vanish for all X, we need the condition stated.
Finally, when \(\mu \) obeys this condition then by Theorem 2.2, we have a \(*\) operation on \(\mathfrak {X}\). This is characterised by
on using the second half of (6) in the theorem, followed by \(\mathfrak {g}_2(X)\) as above and \(\sigma \) from Proposition 6.2. We then use the value of \((e^c,e^d)\) to obtain the first stated expression, which we recognise as the ratio \(R_a(\mu )/\mu \). \(\square \)
We see that the condition \(X^*=X\) is the same as (38) for reality with respect to \(\int \), but now arising as the self-adjoint elements with respect to an involution on \(\mathfrak {X}\).
6.3 Geodesic velocity equation on a discrete group
We assume that we are in the setting where we have fixed \(\int \) compatible with the geometric divergence and hence have defined \(*\) for a real vector field. We now consider the equations (8) and their \(*\) in the discrete group case. We assume the connection is inner.
Proposition 6.5
On a Cayley graph, the geodesic velocity equation for a time-dependent vector field X and with driving term \(F\in \mathfrak {X}\) is
Moreover, assuming that the connection preserves the hermitian metric, \(\kappa ={1\over 2}\textrm{div}_{\int }(X)\) and that F is imaginary with respect to \(\int \), for X to remain real with respect to \(\int \) requires
The geodesic velocity equation is then
Proof
For the first part,
so
and (8) becomes, on addition of a forcing term,
as stated. For the second part, we define
so that our geodesic velocity equation is \(-\dot{X}^a =B^a+F^a\). We let \(X^a\) be real with respect to \(\int \) and \(F^a\) imaginary (i.e. \(\textrm{i}\, F^a\) is real with respect to \(\int \)). Conjugating the original equation and suitably subtracting gives us
Next, for our particular \(B^a\), we have
and conjugating and using the reality of X (and therefore \(\kappa \)) gives
Now
The terms not containing \(\Xi \) in (39) are

and using the divergence (37) and reality condition (38), this becomes

Using the condition for hermitian metric preservation, the two terms containing \(\Xi \) in (39) are

and combining these gives the stated answer. \(\square \)
We can also write the final result in Proposition 6.5 as

by rewinding the last step of the proof where we used hermitian metric compatibility. In the proposition, we added a natural driving force F needed to simultaneously enforce both the velocity equation and its conjugate for X real with respect to \(\int \). The measure \(\mu \) is also arbitrary, but, as before, a natural choice is for the integral to be divergence compatible so that \(\textrm{div}_{\int }=\textrm{div}\), the geometric divergence.
After solving for the geodesic velocity flow \(X^a\), we then solve for the ‘amplitude flow’ on time-dependent \(\psi \in \mathbb {C}(G)\), which is therefore
with probability density \(\rho =\bar{\psi }\psi \) when suitably normalised. It follows from the theory that
so that \(\rho \) can be normalised to a probability measure with respect to \(\int \).
7 Quantum geodesic scattering on the integer lattice line
Here, we see how the Cayley graph theory applies to \(G=\mathbb {Z}\), the integer line graph with \({\mathcal {C}}=\{\pm 1\}\). The simplest case of the theory was recently studied in [10] in the edge-symmetric case, and it was found that divergence compatibility forces the curvature to be zero, i.e. the metric weights must form a geometric sequence. Our theory above is more general and allows us to cover generic metrics with functions \(g_\pm (i)=g_{i\rightarrow i\pm 1}\), but we stick to the edge-symmetric case where \(g_-=R_-(g_+)\) so that there is one function \(g_i:=g_+(i)=g_{i\rightarrow i+1}=g_{i+1\rightarrow i}\) say for the metric weight attached to each edge. We let
and use the unique \(*\)-preserving QLC [28],
This also descends to \(\mathbb {Z}_n\), which has a unique \(*\)-preserving QLC when \(n\ne 4\) [1]. When \(n=4\) with the smaller \(\Omega _\textrm{wor}\), there are some further such \(*\)-preserving QLCs (it is not known if there is a unique QLC for \(n=4\) if we use the bigger calculus \(\Omega _{\min }\)).
Here, the Christoffel symbols in the basis \(e^\pm \) have only two nonzero entries \(\Gamma ^\pm _{\pm \pm }=\rho _\pm -1\). Hence, \(\nabla _\mathfrak {X}\) in the dual basis \(f_\pm \) is
One can check that \(\nabla ,\nabla _\chi \) are indeed left and right connections, respectively, using the commutation rules
and are metric compatible as claimed. The structure constants from the point of view of the theory in Sect. 6 are
with all others zero.
We now proceed in the general setting without assuming divergence compatibility, so both the edge-symmetric metric and the measure are arbitrary. From (37)-(38), we have

for the divergence and reality with respect to \(\int \). Setting \(\kappa ={1\over 2}\textrm{div}_{\int }(X)\), we have
The geodesic velocity equation as in Proposition 6.5 can be computed as
where we add a driving term. We assume this is imaginary with respect to \(\int \) and apply * to the \(\dot{X}^+\) equation, divide by \(-\mu _+\) and then apply \(R_-\), to obtain

which we subtract from the \(\dot{X}^-\) equation to obtain

after a lot of cancellations. We used \(R_-(\mu _+)=1/\mu _-\). We then apply * to obtain the other half of
We now put this driving force term into the velocity equation to obtain finally
which simplifies to
We only have to solve one of these as, by construction, the other is the conjugate. We have given a direct derivation, but one can verify that the same results are obtained from Proposition 6.5 or more easily from (42). Since \(\Xi \) in our case is real, this comes down to
which combined with (43) gives the same as (44). After solving for \(X^+\), say, with any initial distribution on \(\mathbb {Z}\), we are then free to choose any initial wave function \(\psi \) and solve the amplitude flow equations
Example 7.1
So far, the measure and metric are arbitrary. We now exhibit an explicit solutions and for simplicity we take \(\mu \) constant so that \(\mu _\pm =1\). Then the geodesic velocity equation for general metric becomes

For our example, we will stick with \(X^+\) real valued (then it stays real during the evolution) in which case
Our equation in terms of \(X^+\) alone becomes
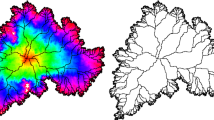
For the quantum metric, we choose one that dips as a cosine (sampled on the integer lattice) as shown in Fig. 6a along with the corresponding function \(\rho \). We then solve the velocity equations (45) with initial value of \(X^+\) at time \(s=0\) a Gaussian located at \(i=40\) at the start of dip. This moves towards the centre then becomes large and turns into a wave packet as shown in Fig. 6b, c. The values are interpolated for purposes of visualisation.
Next, the amplitude equation for real-valued \(X^+\) becomes
which we solve for the previously found \(X^+\), with interpolated results shown in Fig. 6b, c for an initial Gaussian centred at \(i=40\) for maximum effect. If the initial \(\psi \) Gaussian were to be centred to the left or the right of this, then it would keep its shape for the main part but with similar ripples appearing where part of it overlaps the evolving \(X^+\) distribution.

a Metric with a minimum at \(i=50\). b Resulting velocity field \(X^+\) and wave function \(\psi \) (shown interpolated) as functions of geodesic time s, for initial Gaussians centred \(i=40\). Part c shows the same in close-up as three segments of geodesic time
Example 7.2
An initial analysis of quantum geodesics on \(\mathbb {Z}\) in [10] shows that divergence compatibility of \(\int f=\sum _i f\mu \) is possible if and only if \(\rho \) is constant so the metric is exponential in i (the sequence of metric values is a geometric sequence) and in which case the natural measure is \(\mu =g\). From the QRG point of view, this is exactly the case where the Riemann curvature vanishes. This case leads by Theorem 2.2 to

and the geodesic velocity equation (44) and F become
where we used that \(\mu _\pm =\rho ^{\pm 1}\) and
to interpret the second term of F.

Quantum geodesics for an exponentially increasing metric \(g_i=g_0\rho ^i\) with a \(\rho =2\) and b \(\rho =1.1\). In both cases, the geodesic velocity \(X^+\) and the wave function \(\psi \) (shown interpolated) are initially Gaussians centred at \(i=40\)
If we assume for simplicity that \(X^+\) is real valued, then we can use \(X^-=-{R_-(X^+)\over \rho }\) to write (46) entirely in terms of \(X^+\), to obtain
and \(\kappa =(\textrm{id}- {R_-\over \rho })X^+\). The amplitude flow similarly in the real-valued case then becomes
Some numerical solutions where \(X^+\) starts at \(s=0\) as a Gaussian at \(i=40\) and \(\psi \) (for maximum effect) also starts as a Gaussian at \(i=40\) are shown in Fig. 7. Interestingly, for a metric that grows less rapidly so that \(\rho \) is close to 1, we see large oscillations appearing in the evolution. The unitarity is with respect to the measure \(\mu _i=\rho ^i\) so it is \(\sum _{i\in \mathbb {Z}} \rho ^i |\psi _i|^2\) which is preserved under the evolution (as one can check to within numerical accuracy).
The results in this example are complementary to [10], where we imposed \(F=0\) (as an auxiliarly condition needed for geodesic flow without imaginary driving forces). In that case, it is shown, at least for \(\rho =1\), that real-valued \(X^+\) are not possible aside from some trivial cases (but rather it should have constant absolute value). This then leads to the phenomenon that initially real \(\psi \) becomes complex wave functions during the geodesic evolution.
Data availability
Data sharing is not applicable as no data sets were generated or analysed during the current study.
References
Argota-Quiroz, J., Majid, S.: Quantum gravity on polygons and \({{\mathbb{R} }} \times {{\mathbb{Z} }}_n\) FLRW model. Class. Quant. Grav. 37, 245001 (2020)
Argota-Quiroz, J., Majid, S.: Quantum Riemannian geometry of the discrete interval and q-deformation. J. Math. Phys. 64, 051701 (2023)
Aschieri, P., Weber, T.: Metric compatibility and Levi-Civita connections on quantum groups, arXiv:2209.05453
Beggs, E.J.: Noncommutative geodesics and the KSGNS construction. J. Geom. Phys. 158, 103851 (2020)
Beggs, E.J., Majid, S.: Quantum Riemannian Geometry, Grundlehren der mathematischen Wissenschaften, vol. 355, p. 809. Springer (2020)
Beggs, E.J., Majid, S.: *-compatible connections in noncommutative Riemannian geometry. J. Geom. Phys. 61, 95–124 (2011)
Beggs, E.J., Majid, S.: Gravity induced by quantum spacetime. Class. Quant. Grav. 31, 035020 (2014)
Beggs, E.J., Majid, S.: Quantum geodesics in quantum mechanics. J. Math. Phys. (2024). https://doi.org/10.1063/5.0154781
Beggs, E., Majid, S.: Quantum geodesic flows and curvature. Lett. Math. Phys. 113, 73 (2023)
Beggs, E.J., Majid, S.: Quantum geodesic flow on the lattice line. J. Phys. Conf. Ser. 2667, 012016 (2023)
Bhowmick, J., Goswami, D., Landi, G.: On the Koszul formula in noncommutative geometry. Rev. Math. Phys. 32, 2050032 (2020)
Bochniak, A., Sitarz, A., Zalecki, P.: Riemannian geometry of a discretized circle and torus. SIGMA 16, 143 (2020)
Carotenuto, A., O’ Buachalla, R.: Bimodule connections for relative line modules over the irreducible quantum flag manifolds. SIGMA 18, 070 (2022)
Castellani: Gravity on finite groups. Commun. Math. Phys. 218, 609–632 (2001)
Chung, F.: Spectral Graph Theory. In: Regional Conference Series in Mathematics, Vol. 92. AMS (1997)
Connes, A.: Noncommutative Geometry. Academic Press Inc, San Diego (1994)
Dimakis, A., Müller-Hoissen, F., Striker, T.: Noncommutative differential calculus and lattice gauge theory. J. Phys. A Math. Gen. 26, 1927 (1993)
Dimakis, A., Müller-Hoissen, F.: Discrete Riemannian geometry. J. Math. Phys. 40, 1518–1548 (1999)
Dubois-Violette, M., Michor, P.W.: Connections on central bimodules in noncommutative differential geometry. J. Geom. Phys. 20, 218–232 (1996)
Frauendiener, J.: Discrete differential forms in general relativity. Class. Quantum Grav. 23, S369–S385 (2006)
Lira-Torres, E., Majid, S.: Quantum gravity and Riemannian geometry on the fuzzy sphere. Lett. Math. Phys. 111, 29 (2021)
Liu, C., Majid, S.: Quantum geodesics on quantum Minkowski spacetime. J. Phys. A 55, 424003 (2022)
Lott, J., Villani, C.: Ricci curvature for metric-measure spaces via optimal transport. Ann. Math. 169, 903–991 (2009)
Majid, S.: Quantum and braided group Riemannian geometry. J. Geom. Phys. 30, 113–146 (1999)
Majid, S.: Riemannian geometry of quantum groups and finite groups with nonuniversal differentials. Commun. Math. Phys. 225, 131–170 (2002)
Majid, S.: Quantum gravity on a square graph. Class. Quantum Grav. 36, 245009 (2019)
Majid, S.: Noncommutative Riemannian geometry of graphs. J. Geom. Phys. 69, 74–93 (2013)
Majid, S.: Quantum Riemannian geometry and particle creation on the integer line. Class. Quantum Grav 36, 135011 (2019)
Mourad, J.: Linear connections in noncommutative geometry. Class. Quant. Grav. 12, 965–974 (1995)
Olsthoorn, J.: Relativistic fluid dynamics. Waterloo Math. Rev. 1, 44–58 (2011)
Woronowicz, S.: Differential calculus on compact matrix pseudogroups (quantum groups). Commun. Math. Phys. 122, 125–170 (1989)
Funding
No funds, grants or other support was received.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Beggs, E., Majid, S. Quantum geodesic flows on graphs. Lett Math Phys 114, 112 (2024). https://doi.org/10.1007/s11005-024-01860-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11005-024-01860-6