
Abstract
We study geodesics flows on curved quantum Riemannian geometries using a recent formulation in terms of bimodule connections and completely positive maps. We complete this formalism with a canonical \(*\) operation on noncommutative vector fields. We show on a classical manifold how the Ricci tensor arises naturally in our approach as a term in the convective derivative of the divergence of the geodesic velocity field and use this to propose a similar object in the noncommutative case. Examples include quantum geodesic flows on the algebra of \(2 \times 2\) matrices, fuzzy spheres and the q-sphere.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Noncommutative geometry is the idea that we can extend geometric concepts to the case where ‘coordinate algebras’ are noncommutative. On the physics side, a motivation is the quantum spacetime hypothesis that spacetime is better modelled by noncommutative coordinates due to quantum gravity effects. This was speculated upon at various points since the early days of quantum mechanics [23] but in a modern era specific proposals for models appeared in [10, 12, 17, 18] among others, but without the machinery of quantum Riemannian geometry as now available in a constructive form [2]. Rather, such models were dictated by ideas from quantum groups such as Hopf algebra duality and Born reciprocity [17], quantum group symmetry [18] and classical symmetry [10, 12]. By now, a great many models are known with quantum metrics and quantum Riemannian curvature, including black hole models and finite models of quantum gravity, e.g. [1, 6, 13, 20]. The constructive formalism used in these works follows a ‘ground up’ approach where we start with the ‘coordinate algebra’ A, define a differential structure in terms of a differential graded algebra \((\Omega ,\textrm{d})\) of ‘differential forms’, then a quantum metric \(g\in \Omega ^1\mathop {{\otimes }}_A\Omega ^1\), then a quantum Levi-Civita or other connection \(\nabla :\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\), its curvature \(R_\nabla :\Omega ^1\rightarrow \Omega ^2\mathop {{\otimes }}_A\Omega ^1\), etc. There is also a practical ‘working definition’ of Ricci and in some cases Einstein tensors which sometimes produces reasonable results in the sense of vanishing divergence with respect to \(\nabla \) but which is not canonical. One of our goals in the present paper is to come at the Ricci tensor from another angle for this reason. There is also a well-known and more sophisticated Connes approach to noncommutative geometry coming out of cyclic cohomology and K-theory [8] and with examples such as the noncommutative torus, as well as physical applications including ideas for the standard model of particle physics [9]. This particularly makes use of the notion of a ‘spectral triple’ or abstract Dirac operator to implicitly encode the quantum geometry. Sometimes, Connes spectral triples can be realised within the constructive quantum Riemannian geometry [7, 14], i.e. there is a useful intersection between these approaches.
Working in the constructive formalism as in [2], we continue in the present work to explore the recently introduced notion of a ‘quantum geodesic’ [3, 5] and particularly how it interacts with curvature. Until now, only quantum geodesics on flat examples were worked out, such as the equilateral triangle [3] and the Heisenberg algebra with a flat linear connection [5]. We now study quantum geodesic flows on known quantum Riemannian geometries on \(M_2({\mathbb {C}})\) and the fuzzy sphere, and we write down but do not explicitly solve for quantum geodesics on the q-sphere \({\mathbb {C}}_q[S^2]\). A parallel work [15] covers quantum-Minkowski space from the point of view of physical predictions and also a curved (but not quantum Levi-Civita) connection on the noncommutative torus.
In studying our models, we are led to considerably improve the quantum geodesic formalism itself, solving two fundamental problems in the original work [3]. The first is about the \(*\)-operation needed for a unitary theory over \({\mathbb {C}}\), which previously was proposed via some requirements but without a canonical choice. This is now rectified in Theorem 4.7 under the assumption that the positive linear functional \(\int :A\rightarrow {\mathbb {C}}\) needed for the theory is a twisted trace \(\int ab=\int \varsigma (b)a\) for an algebra automorphism \(\varsigma \). This is a common enough situation in noncommutative geometry. The other issue that we address is an auxiliary braid condition in [3, 5] which is empty in the classical case but which turns out in our examples to be too restrictive. In Corollary 4.12, we now understand this condition as sufficient but not necessary for compatibility of the geodesic evolution with our canonical \(*\)-structure and propose a weaker ‘improved auxiliary condition’ to replace it.
The formalism of quantum geodesics will be outlined in the preliminaries Sect. 2, with the new general results in Sect. 4. The formalism itself involves a radically new way of thinking about geodesics, even classically, and Sect. 3 provides new results for the formalism applied in the classical case to a Riemannian manifold. Qualitatively speaking, the idea of quantum geodesics is not to follow one particle at a time but to think of a ‘fluid of particles’ each moving along geodesics. In reality, what would be the density will actually be a quantum mechanical probability density \(\rho =|\psi |^2\) for a complex wave function over the manifold. However, keeping the fluid analogy in mind, the tangent vectors to all the geodesic motions can be viewed together as a velocity vector field X on the manifold. The key point in [3] is that this vector field is characterised by a geodesic velocity equation as autoparallel with respect to a linear connection and can be solved for first, independently of the particles themselves. A further equation, which we call the amplitude flow equation, is a Schrodinger-like equation on the wave function \(\psi \) relative to X that evolves it in such a way that \(\rho \) corresponds to the particles at each point of the manifold having velocity given by X at that point. Thus, we rip apart the usual notion of a geodesic into the particle locations and the particle velocities and then we put them back in reverse order, first solving for X and then for \(\psi \). This is a radically different approach, and some detailed examples even on flat \({\mathbb {R}}^n\) are provided in [15] to help with this conceptual transition. Our new result in Sect. 3 in this context is that if X is a geodesic velocity field, then the convective derivative D/Dt along X (defined as usual in fluid dynamics) obeys
where X has components \(X^\mu \) in local coordinates and \(R_{\mu \nu }\) is the Ricci tensor associated with the connection. The latter would normally be the Levi-Civita connection but in fact the theory at this level does not require a metric, just a linear connection. This gives a striking new way of thinking about the familiar connection in GR between the Ricci tensor and the change of position of nearby objects in geodesic motion. We also show how the classical role of the Riemann curvature as controlling geodesic deviation looks in this new language. In Sect. 4.4, we propose noncommutative versions of the two terms displayed above as \(-F(X)\) and \(-R(X)\), respectively, with the split suggested by good properties with respect to \(*\). We see in the noncommutative examples how the ‘Ricci quadratic form’ R(X) compares with the naive Ricci tensor in the current noncanonical approach. We do not believe this to be the last word on the topic, but it can be viewed as a first look at the problem from a fresh angle. The \(2\times 2\) quantum matrices are treated in Sect. 5, the fuzzy sphere in Sect. 6 and the q-sphere in Sect. 7. By fuzzy sphere, we mean the standard quantisation of a coadjoint orbit in \(su_2^*\) as a quotient of \(U(su_2)\) by a fixed value of the quadratic Casimir, equipped now with the 3-dimensional but rotationally invariant differential calculus [2, Example 1.46] and quantum Riemannian geometry from [13]. But the theory also applies to its finite-dimensional matrix algebra quotients which are also of interest [16, 24, 25]. By q-sphere, we mean the base of the q-Hopf fibration as a subalgebra of the standard quantum group \({\mathbb {C}}_q[SU_2]\) in the theory of quantum principal bundles and with the quantum Riemannian geometry introduced in [19]. It is a member of the more general 2-parameter Podlès spheres [22] but the only one for which the quantum Riemannian geometry has been explored. The paper has some concluding remarks in Sect. 8 with a discussion of directions for further work.
2 Preliminaries
Here, we recall in more detail what a quantum geodesic is as proposed in [3] and studied further in [5, 15]. We explain the algebraic point of view which works even when the ‘coordinate algebra’ of the spacetime is a possibly noncommutative unital algebra A.
2.1 Quantum Levi-Civita connections
We suppose a differential structure in the form of an A-bimodule \(\Omega ^1\) of differential forms equipped with a map \(\textrm{d}:A\rightarrow \Omega ^1\) obeying the Leibniz rule
and such that \(\Omega ^1\) is spanned by elements of the form \(a\textrm{d}b\) for \(a,b\in A\). This can always be extended to a full differential graded ‘exterior algebra’ though not uniquely. (There is a unique maximal one.) In the \(*\)-algebra setting, we say we have a \(*\)-differential structure if \(*\) extends to \(\Omega \) (or at least \(\Omega ^1\)) as a graded-involution (i.e. with an extra minus sign on swapping odd degrees) and commutes with \(\textrm{d}\). A full formalism of quantum Riemannian geometry in this setting can be found in [2]. In particular, a metric means for us an element \(g\in \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) which is invertible in the sense of a bimodule map \((\,\ ):\Omega ^1\mathop {{\otimes }}_A\Omega ^1 \rightarrow A\) obeying the usual requirements as inverse to g. This forces g in fact to be central. Then, a QLC or quantum Levi-Civita connection is a bimodule connection \((\nabla ,\sigma )\) on \(\Omega ^1\) which is metric compatible and torsion free in the sense
Here, we prefer right bimodule connections \(\nabla :\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) characterised by
where the ‘generalised braiding’ bimodule map \(\sigma :\Omega ^1\mathop {{\otimes }}_A\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) is assumed to exist and is uniquely determined by the second equation. Connections with the first, usual, Leibniz rule are standard while bimodule connections with the further rule from the other side appeared in [11, 21].
There is an analogous theory of left bimodule connections with left and right swapped. In this paper, as in [5], we mostly prefer right bimodule connections, but we note that in the context where the generalised braiding is invertible we can go freely back and forth between a right \((\nabla ,\sigma )\) as above and an equivalent left bimodule connection \((\nabla ^L,\sigma _L)\) according to
It will be useful to use both versions related in this way. We will also have recourse to a space of ‘left quantum vector fields’ defined as the A-bimodule of left A-module maps
for all \(\omega \in \Omega ^1,a,b\in A\) and \(X\in {\mathfrak {X}}\). Moreover, if \((\nabla ^L,\sigma _L)\) is a left bimodule connection on \(\Omega ^1\) and the latter is finitely generated projective (f.g.p.) as a left A-module, then \({\mathfrak {X}}\) canonically acquires a right bimodule connection \(\nabla _{\mathfrak {X}}: {\mathfrak {X}}\rightarrow {\mathfrak {X}}\mathop {{\otimes }}_A \Omega ^1\) with \(\sigma _{\mathfrak {X}}:\Omega ^1\mathop {{\otimes }}_A{\mathfrak {X}}\rightarrow {\mathfrak {X}}\mathop {{\otimes }}_A\Omega ^1 \). Here, \(\nabla _{\mathfrak {X}}\) obeys Leibniz rules as in (2) but with \(\omega \in \Omega ^1\) replaced by \(X\in {\mathfrak {X}}\) and \(\sigma \) replaced by \(\sigma _{\mathfrak {X}}\). We refer to [2, Prop. 3.32] for details, but the key idea is that \(\nabla _{{\mathfrak {X}}}\) is characterised as preserving the evaluation map \(\textrm{ev}:\Omega ^1\mathop {{\otimes }}_A {\mathfrak {X}}\rightarrow A\), i.e.
for all \(\omega \in \Omega ^1\) and \(X\in {\mathfrak {X}}\). The map \(\sigma _{\mathfrak {X}}\) is uniquely determined from \(\nabla _{{\mathfrak {X}}}\) but likewise obtained by dualisation of \(\sigma _L\), see [2, Prop. 3.80].
2.2 A-B bimodule connections and geodesic bimodules
So far we have discussed only linear connections \(\nabla \) on \(\Omega ^1\) and \(\nabla _{\mathfrak {X}}\) on \({\mathfrak {X}}\), but similar notions apply for (right) bimodule connections \(\nabla _E:E\rightarrow E\mathop {{\otimes }}_A\Omega ^1\) on any A-bimodule E. Here, E is thought of as the space of sections of a vector bundle if A is thought of as the coordinate algebra on the base. The generalised braiding \(\sigma _E:\Omega ^1\mathop {{\otimes }}_A E\rightarrow E\mathop {{\otimes }}_A\Omega ^1\) is a bimodule map, and the two Leibniz rules follow the same form as (2). One has a notion of tensor product of A-bimodules with bimodule connection following the same form as \(\nabla g\) in (1). Details are in [2] but omitted since we will need in fact a relative version, of which this is just the diagonal case.
Thus, we will need the notion of an A-B bimodule connection \(\nabla _E\) on an A-B bimodule E, where \((B,\Omega ^1_B)\) is another algebra with differential calculus [2, Def. 4.69]. This is a novel concept even in the classical case. For the right-handed theory, \(\nabla _E: E\rightarrow E\mathop {{\otimes }}_B \Omega ^1_B\) and
for all \(e\in E\), \(a\in A\) and \(b\in B\), for some A-B bimodule map \(\sigma _E: \Omega ^1\mathop {{\otimes }}_A E\rightarrow E\mathop {{\otimes }}_B\Omega ^1_B\). Moreover, if E, F are, respectively, an A-B bimodule with bimodule connection and a B-C bimodule with bimodule connection (there are now potentially three algebras A, B, C with differential calculi), then \(E\mathop {{\otimes }}_B F\) is an A-C bimodule with bimodule connection by
giving the structure of a 2-category. In particular, given an A-B bimodule with bimodule connection, both domain \( \Omega ^1\mathop {{\otimes }}_A E\) and codomain \(E\mathop {{\otimes }}_B\Omega ^1_B\) of \(\sigma _E\) acquire tensor product A-B bimodule connections given one on E, a bimodule connection \(\nabla \) on \(\Omega ^1\) (it does not have to be a QLC) and a bimodule connection \(\nabla _B\) on \(\Omega ^1_B\).
The other ingredient we need is that if E, F are A-B bimodules with bimodule connections, then the set of A-B bimodule maps \(\phi :E\rightarrow F\) acquires a ‘covariant derivative’
which is easily seen to be a right B-module map. This is more familiar in the diagonal case, where classically it has the meaning of the covariant derivative of \(\phi \) viewed as an element of the dual of E tensor with F. We then define a strict geodesic differential bimodule as an A-B bimodule with bimodule connection \((\nabla _E,\sigma _E)\) such that \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)=0\). We now weaken this condition.
Lemma 2.1
-
(1)
Let E be an A-B bimodule with bimodule connection and \((\nabla ,\sigma )\), \((\nabla _B,\sigma _B)\) (right) bimodule connections on \(\Omega ^1,\Omega ^1_B\), respectively. Then, the obstruction to \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)\) being a left A-module (and hence A-B bimodule) map is the mixed braid relations:
$$\begin{aligned} \nabla \hspace{-6.111pt}\nabla (\sigma _E)&(a\,\omega \mathop {{\otimes }}e)-a\,\nabla \hspace{-6.111pt}\nabla (\sigma _E)(\omega \mathop {{\otimes }}e)\\&= \big ((\textrm{id}\mathop {{\otimes }}\sigma _B)(\sigma _E\mathop {{\otimes }}\textrm{id})(\textrm{id}\mathop {{\otimes }}\sigma _E) -(\sigma _E\mathop {{\otimes }}\textrm{id})(\textrm{id}\mathop {{\otimes }}\sigma _E)(\sigma \mathop {{\otimes }}\textrm{id}) \big )(\textrm{d}a\mathop {{\otimes }}\omega \mathop {{\otimes }}e) \end{aligned}$$for all \(a\in A, \omega \in \Omega ^1, e\in E\).
-
(2)
Suppose further that \(\sigma \) is invertible and E also has a (possibly unrelated) left A-B bimodule connection \((\hat{\nabla }_E,\hat{\sigma }_E)\). Let \(\alpha :\Omega ^1\mathop {{\otimes }}_A E\rightarrow E\mathop {{\otimes }}_B\Omega ^1_B\mathop {{\otimes }}_B\Omega ^1_B\) be
$$\begin{aligned} \alpha :=\nabla \hspace{-6.111pt}\nabla (\sigma _E)- \big ((\textrm{id}\mathop {{\otimes }}\sigma _B)(\sigma _E\mathop {{\otimes }}\textrm{id})(\textrm{id}\mathop {{\otimes }}\sigma _E) -(\sigma _E\mathop {{\otimes }}\textrm{id})(\textrm{id}\mathop {{\otimes }}\sigma _E)(\sigma \mathop {{\otimes }}\textrm{id}) \big ) \hat{\nabla }_{\Omega ^1\mathop {{\otimes }}E}, \end{aligned}$$where we use the left tensor product connection on \(\Omega ^1\mathop {{\otimes }}_A E\) with \(\nabla ^L=\sigma ^{-1}\nabla \) the associated left connection on \(\Omega ^1\). This is a left A-module map, and the obstruction to being a right B-module (and hence A-B bimodule) map is
$$\begin{aligned} \alpha&(\omega \mathop {{\otimes }}e.b)-\alpha (\omega \mathop {{\otimes }}e).b \\&= - \Big ( \big ((\textrm{id}\mathop {{\otimes }}\sigma _B)(\sigma _E\mathop {{\otimes }}\textrm{id})(\textrm{id}\mathop {{\otimes }}\sigma _E)\\&\quad -(\sigma _E\mathop {{\otimes }}\textrm{id})(\textrm{id}\mathop {{\otimes }}\sigma _E)(\sigma \mathop {{\otimes }}\textrm{id}) \big ) (\sigma ^{-1}\mathop {{\otimes }}\textrm{id}) (\textrm{id}\mathop {{\otimes }}\hat{\sigma }_E)\Big )(\omega \mathop {{\otimes }}e \mathop {{\otimes }}\textrm{d}b) \end{aligned}$$for all \(b\in B, \omega \in \Omega ^1, e\in E\).
Proof
We begin with (4) and use the a result from [2, p. 302], but in the right-handed version, to give
If we set \(\phi \) to be \(\sigma _E\) and use the appropriate \(\sigma \) for its domain and codomain, then we get the first displayed equation. From this, it follows that \(\alpha \) is a left A-module map, given the left Leibniz rule. The last equation then follows because \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)\) is necessarily a right module map, while \(\hat{\nabla }_{\Omega ^1\mathop {{\otimes }}E}\) is a left bimodule connection requiring \((\sigma ^{-1}\mathop {{\otimes }}\textrm{id}) (\textrm{id}\mathop {{\otimes }}\hat{\sigma }_E)\) from its generalised braiding. \(\square \)
Part (1) of the lemma says that a slight generalisation of a strict geodesic bimodule, namely to just require that \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)\) be a bimodule map, is equivalent to the mixed braid relation between \(\sigma _B,\sigma _E,\sigma \). This braid relation appeared as an ‘auxiliary condition’ in the analysis of the \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)=0\) case in previous work [3, 5]. In this slightly more general case, \(\alpha :=\nabla \hspace{-6.111pt}\nabla (\sigma _E)\) is a bimodule map and has the interpretation of an external driving force, but we still have the auxiliary braid condition which turns out to be too restrictive for key examples of interest in this paper.
We therefore have to drop that \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)\) is a bimodule map. Part (2) of the lemma says that we can then modify \(\alpha \) as stated to potentially still obtain a bimodule map if we have the additional data of a second connection \((\hat{\nabla }_E,\hat{\sigma }_E)\) subject to the weaker braid condition stated. For example, \(\hat{\sigma }_E=0\) would automatically ensure that \(\alpha \) is a bimodule map, again interpreted as an external driving force. We refer to this situation where the braid relation is not entailed as a nonstrict geodesic bimodule with or without external force \(\alpha \). Being a bimodule map, it is only then natural to set \(\alpha =0\) if we want. Note that \(\sigma _E,\hat{\sigma }_E\) have no reason to be invertible when \(A\ne B\), as they map to very different spaces.
2.3 Geodesic velocity field equations
Having prepared the algebraic background, we now see how these ideas relate to geodesic flows. Here and for the rest of the paper, we focus on the case \(E=A\mathop {{\otimes }}B\) with its canonical A-B bimodule structure. In this case,
is a natural reference connection for our nonstrict geodesic bimodule, and we fix this throughout. We also identify \(\Omega ^1\mathop {{\otimes }}_AE=\Omega ^1\mathop {{\otimes }}B\) in the standard way, and in this case, since \(\hat{\nabla }_E(1\mathop {{\otimes }}b)=0\), we have
where we assume throughout that \(\sigma \) is invertible so that \(\nabla ^L=\sigma ^{-1}\nabla \) is an equivalent left connection on \(\Omega ^1\). Moreover, \(\alpha \) being a bimodule map needs only to be specified on \(\Omega ^1\mathop {{\otimes }}1\), where we see that
Of interest for geodesics, and which we also fix now for the rest of the paper, is the choice \(B=C^\infty ({\mathbb {R}})\) where \({\mathbb {R}}\) refers to the geodesic time t. We fix the classical calculus \(\Omega ^1_B=B\textrm{d}t\) with a central basis \(\textrm{d}t\) and \(\nabla _B\textrm{d}t=0\). The map \(\sigma _B\) is the classical ‘flip’ but \(\Omega ^1_B\mathop {{\otimes }}_B\Omega ^1_B=B\textrm{d}t\mathop {{\otimes }}\textrm{d}t\) so that \(\sigma _B=\textrm{id}\) after these identifications. Hence, in this case
which is the equation that we will use. Setting \(\alpha =0\) will describe quantum geodesics but fixing \(\alpha \) as an external bimodule map is a natural generalisation beyond this. We no longer entail the braid relations discussed above because the correction term in the expression for \(\alpha \) compensates for the failure of this.
Next, for our choice of E, we can also take \(\nabla _E\) in a standard form [3, Prop. 5.1]
given by a time-dependent left quantum vector field \(X_t\) and a time-dependent element \(\kappa _t\) of A. We similarly note that an A-B bimodule map \(\alpha :\Omega ^1\mathop {{\otimes }}B\rightarrow A\mathop {{\otimes }}B\textrm{d}t\mathop {{\otimes }}\textrm{d}t\) just amounts to a fixed (not time dependent) left quantum vector field \(Y:\Omega ^1\rightarrow A\).
Proposition 2.2
For \(E=A\mathop {{\otimes }}B\) in the setting above, the requirement of a nonstrict geodesic bimodule with external driving force \(Y\in {\mathfrak {X}}\) reduces to the geodesic velocity equations
for all \(\omega \in \Omega ^1\).
Proof
The calculation is essentially the same as a right-handed version of the start of the proof of [3, Prop. 5.2] before \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)=0\) was imposed there. Namely, omitting the t on \(X_t\) for brevity and identifying \(\omega \mathop {{\otimes }}_A 1_E=\omega \mathop {{\otimes }}1\) where \(1_E=1\mathop {{\otimes }}1\in A\mathop {{\otimes }}B\), we have
since \(\nabla _{\Omega ^1\mathop {{\otimes }}E}=(\textrm{id}\mathop {{\otimes }}\sigma _E)(\nabla \mathop {{\otimes }}\textrm{id})+ \textrm{id}\mathop {{\otimes }}\nabla _E\) and \(\nabla _E 1_E=\kappa \mathop {{\otimes }}\textrm{d}t\). We put this and \(\alpha (\omega \mathop {{\otimes }}1)=Y(\omega )\mathop {{\otimes }}\textrm{d}t\mathop {{\otimes }}\textrm{d}t\) into Eq. (5) to obtain
as stated. Here, \(\sigma \nabla ^L=\nabla \) was used in the cancellation for the second equality and we then further substituted \(\nabla _E,\sigma _E\) in terms of \(X,\kappa \). \(\square \)
If \(\Omega ^1\) is f.g.p., then the geodesic velocity equation in Proposition 2.2 is equivalent by a straightforward dualisation (following analogous steps to those in the proof of [5, Cor. 2.3]) to
in terms of the right connection on \({\mathfrak {X}}\) dual to \(\nabla ^L\) explained at the end of Sect. 2.1. We see that the case \(Y=0\) says in the classical limit that X is autoparallel with respect to \(\nabla _{\mathfrak {X}}\), i.e. the tangent vector field to a field of generalised geodesics in this sense (and in the usual sense if the connection is the Levi-Civita one). By analogous steps to the rest of the proof of [5, Cor. 2.3], the auxiliary braid condition, which we have now seen is equivalent to \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)\) being a bimodule map (such as zero), can be written as
for a certain generalised braiding \(\sigma _{{\mathfrak {X}}{\mathfrak {X}}}\). This equation will turn out to be too strong in key examples and forces us to the nonstrict case. We will, however, meet \(\sigma _{{\mathfrak {X}}{\mathfrak {X}}}\) later, in Corollary 4.12 in relation to \(*\)-operations.
Proceeding with \(Y=0\), flows are then obtained by ‘integrating’ \(X_t\) and are characterised in a quantum mechanical Schrodinger’s equation like manner by \(\nabla _E e=0\). Here, \(\rho =e^*e\) depends on t as e depends on t and evolves in the classical limit as one might expect for the density of a fluid, where each particle moves with tangent vector \(X_t\) evaluated at the location of the particle. (This is geodesic flow if \(X_t\) obeys the geodesic velocity equation but applies generally for any flow of this type.) There is, however, one condition we need to ensure, which is that there is a positive linear functional, which we will denote \(\int : A\rightarrow {\mathbb {C}}\), such that \(\int \rho \) is constant in time (so can be normalised to 1). For this to happen, we need the hermitian inner product \(\langle e,f\rangle :=\int (e^*f)\) on E to be preserved by \(\nabla _E\), which comes down to the two unitarity conditions
for all \(a\in A, \omega \in \Omega ^1\). In the classical limit and in the case of the Levi-Civita connection, we would take for \(\int \) the Riemannian measure defined by the metric. Moreover, the first of (9) for all a would amount in the classical limit to the local condition
(as reviewed in Lemma 3.1). In the quantum case, we can replace \(\textrm{div}_\nabla \) by a divergence naturally defined by \(\int \), and in this case we can set \(\kappa _t\) to be \({1\over 2}\) of this divergence to similarly solve the first condition. Classically, this means choosing \(\kappa _t\) real and in this case \(\nabla _E e=0\) reduces to
as expected classically for a half-density. Here, if we have a dust of particles moving with (possibly time dependent) velocity field \(X_t\), then the rate of change of any time-dependent scalar field e on the manifold as computed moving with the flow is the convected derivative
The second part of the unitarity condition (9) in the quantum case, being true for all \(\omega \), determines how \(*\) acts on the \(X_t\) and reduces in the classical case to \(X_t\) a real vector field if we take the standard measure.
3 States and divergence of the velocity equation on a classical manifold
In order to progress the quantum geometry further in the present paper, we first revisit the classical case of our point of view with some new classical results, notably involving the Ricci tensor. We then look at what we can say in the quantum case.
3.1 Classical divergence, fluid dust and the Ricci tensor
Consider an orientated Riemannian manifold M with metric g and its standard measure \(\mu \), which is given on each coordinate chart by
where f is a function on M supported in the chart and \(|g|=|\det (g_{ij})|\). We use local coordinates and index comma notation for partial derivative and semicolon for covariant derivative. The geometric divergence of a vector field X with respect to a connection is then defined as usual by \(\textrm{div}_\nabla X=X^{i}{}_{;i}\). We start by recalling a well-known lemma needed for the exposition. We use the Levi-Civita connection.
Lemma 3.1
For the standard measure \(\mu \) on a Riemannian manifold, any vector field X on M and any \(f\in C^\infty (M)\), we have
Proof
The property we want to prove is linear in X, so without loss of generality we choose the support of X to be contained in a particular coordinate chart. Then, by usual integration by parts,
and
We used the usual formula for the Christoffel symbols for the Levi-Civita connection. \(\square \)
We now examine the dynamic behaviour of this divergence when the vector field is our time-dependent \(X_t\). The classical limit of the geodesic velocity equation is the autoparallel equation
If we start with an initial vector field \(X_0\) on M and imagine that M is filled with particles of dust each moving according to geodesic motion beginning with velocity \(X_0\) at their starting point, then the velocity field at later proper time t will become \(X_t\) obeying this equation. Our new result is the following.
Proposition 3.2
If time-dependent X obeys (11) as needed for geodesic flow, then
where \(R_{ij}\) is the Ricci tensor.
Proof
For the first part, \(|X|^2\) is the length squared of X with respect to the metric. Then, the convected derivative is
where we have used \(g_{ij;k}=0\). For the second part, the convected derivative is
and substituting from (11) gives
Now, recall that the Ricci tensor is, in terms of Christoffel symbols,
and in terms of this, we have
\(\square \)
Thus, the speed along the geodesic flow is constant as expected, while the convected derivative (i.e. in the frame of the moving material) of the divergence is given by a dynamic ‘kinetic’ part expressing the varying velocity field plus a geometric part consisting of the Ricci curvature as a quadratic form evaluated on the velocity field.
3.2 Geodesic deviation and convective derivatives
The classical idea of geodesic deviation imagines a given geodesic displaced an infinitesimal amount in the direction Z, so that instead of position P(t) we have \(P(t)+h\,Z(t)\) for a small parameter h. Thus, along a particular geodesic we have the velocity \(X=\dot{P}\) and \(\delta X=\dot{Z}\) for the change in X with respect to the parameter h. Then, the acceleration of Z along the geodesic is given by the curvature applied to Z and X, i.e. the equation of geodesic deviation.
In our case, we do not consider a fixed geodesic but rather we have a time-dependent geodesic velocity field X(t) which obeys the geodesic velocity equation \(\dot{X}+\nabla _X X=0\). The above usual picture gets modified, with the perturbation now determined by a time-dependent vector field Z(t) in a similar role. Note that the convective derivative of a tensor is defined in the same manner as for a function, namely \({D\over D t}:={\textrm{d}\over \textrm{d}t}+ \nabla _X\).
Proposition 3.3
Let a time-dependent X(t) obey the geodesic velocity Eq. (11) and if Z(t) is another time-dependent vector field, let \(\delta X:=\dot{Z}+\nabla _X Z-\nabla _Z X\). Then, \(X+h\delta X\) continues to obey (11) to order \(O(h^2)\) if and only if
We refer to this as the geodesic deviation equation for time-dependent vector fields.
Proof
Note that \([Z,X] =\nabla _Z X-\nabla _X Z\) is the Lie bracket of X and Z when \(\nabla \) is torsion free, as in the case of a Levi-Civita connection. Then, the variation of the geodesic velocity equation, i.e. requiring \(\dot{X}+ h\dot{\delta X}+\nabla _{X+ h\delta X}(X+h\delta X)=0\) and dropping \(h^2\), gives
Hence, the convected acceleration of Z along X can be computed as
where the transition to the second equality is exactly our above equation for \({\ddot{Z}}\). We then interpret the result using
\(\square \)
We include this result for completeness as equivalent to usual geodesic deviation but using our new way of thinking classical geodesics. This also lays the groundwork for the quantum version to be addressed elsewhere. In fact, there are significant complications from the divergence of X entering the quantum version of the geodesic velocity equation.
4 Noncommutative states and divergence
This section contains new constructions at the noncommutative level, where we address the reality or \(*\)-involution aspects of quantum geodesic evolution and use this to develop aspects of the theory motivated by the preceding classical results about the convective derivative of the divergence. The main results are a compatibility condition for the state with respect to the quantum Riemannian geometry and a proposal for a ‘Ricci quadratic form’.
4.1 The matching of geometric and state divergences
Here, we study the divergence of a left quantum vector field in \({\mathfrak {X}}={}_A\textrm{Hom}(\Omega ^1,A)\). We start with the divergence defined by an arbitrary left connection \(\hat{\nabla }: {\mathfrak {X}}\rightarrow \Omega ^1 \mathop {{\otimes }}_A {\mathfrak {X}}\), but in the next subsection we will fix this as the left version of \(\nabla _{\mathfrak {X}}\) used to define quantum geodesics. We also consider divergence defined by a functional \(\phi :A\rightarrow {\mathbb {C}}\) and relate the two.
Definition 4.1
The divergence with respect to a left connection \(\hat{\nabla }\) is defined as \(\textrm{div}_{\hat{\nabla }}:=\textrm{ev}\circ \hat{\nabla }: {\mathfrak {X}}\rightarrow A\).
This is easily seen to obey \(\textrm{div}_{\hat{\nabla }}(a.X)=a.(\textrm{div}_{\hat{\nabla }} X)+ X(\textrm{d}a)\) for all \(a\in A, X\in {\mathfrak {X}}\).
Definition 4.2
We say that \(X\in {\mathfrak {X}}\) has divergence \(\textrm{div}_\phi X\in A\) with respect to a linear functional \(\phi \) if
for all \(a\in A\). We say that \(\phi \) is nondegenerate if it has the property that \(\phi (ac)=0\) for all \(c\in A\) implies that \(a=0\).
It is easy to see that if \(\phi \) is nondegenerate and \(\textrm{div}_\phi X\) exists, it is unique. Next, recall from Proposition 3.1 that classically, in the case of a Riemannian manifold, the divergences defined by the Levi-Civita connection and the standard integral are the same. We now give a sufficient condition to ensure this more generally.
Lemma 4.3
If we have a left connection \(\hat{\nabla }\) on \({\mathfrak {X}}\) such that \(\textrm{div}_{\hat{\nabla }}\) obeys the equation in Definition 4.2 on a collection of left generators of \({\mathfrak {X}}\), then we can set \(\textrm{div}_\phi =\textrm{div}_{\hat{\nabla }}\) on all of \({\mathfrak {X}}\).
Proof
Suppose that \(\textrm{div}_\phi (X)\) exists for a given vector field X. For all \(c\in A\), we have
so \(\textrm{div}_\phi (a.X)\) also exists, namely \(\textrm{div}_\phi (a.X):=a\,\textrm{div}_\phi X +X(\textrm{d}a)\). The statement then follows. \(\square \)
This can be stated in an alternative concise manner as the following.
Proposition 4.4
We can set \(\textrm{div}_\phi :=\textrm{div}_{\hat{\nabla }}\) on all of \({\mathfrak {X}}\) if and only if \(\phi \circ \textrm{div}_{\hat{\nabla }}=0\).
Proof
For all \(a\in A\) and \(X\in {\mathfrak {X}}\), we have
so if this is always zero, then \(\textrm{div}_{\hat{\nabla }}(X)\) provides a valid \(\textrm{div}_\phi (X)\). \(\square \)
4.2 Twisted traces and \(*\)-involution on vector fields
For this subsection, we suppose that A is a \(*\)-algebra with \(*\)-calculus, and that \(\phi :A\rightarrow {\mathbb {C}}\) is hermitian (i.e. \(\phi (a^*)=\phi (a)^*\)). We can now define a real vector field, but only relative to \(\phi \).
Definition 4.5
We define \(X\in {\mathfrak {X}}\) to be real with respect to \(\phi \) if \(\phi (X(\omega ^*))=\phi (X(\omega )^*)\) for all \(\omega \in \Omega ^1\).
If X is real, then we have
for all \(a\in A\). Note also that the reality condition is just the second part of (9), and in this case we see that the first part of (9) can be satisfied by putting \(\kappa _t=\tfrac{1}{2} \textrm{div}_\phi (X_t)\). To get further, we need to make an assumption on \(\phi \).
Definition 4.6
We say that \(\phi \) is a twisted trace if there is an algebra automorphism \(\varsigma \) with \(\phi (a b)=\phi (\varsigma (b) a)\).
It is easy to see that then \(\phi \circ \varsigma =\phi \), and if \(\phi \) is furthermore nondegenerate, then \(\varsigma ^{-1}(a)=\varsigma (a^*)^*\). In the following theorem, we have the assumption that \(\textrm{div}_\phi =\textrm{div}_{\nabla }\) on all of \({\mathfrak {X}}\), and we then just use \(\textrm{div}\) for both. We will only use the notation \(\textrm{div}\) in the case when both divergences agree.
Theorem 4.7
Suppose that \(\phi \) is a nondegenerate hermitian twisted trace with twisting map \(\varsigma \), and that \(\varsigma \) extends to a map \(\varsigma :\Omega ^1\rightarrow \Omega ^1\) by \(\varsigma (a.\textrm{d}b)=\varsigma (a).\textrm{d}\varsigma (b)\). We also assume that \((\hat{\nabla },\hat{\sigma })\) is a left bimodule connection on \({\mathfrak {X}}\) with \(\textrm{div}_\phi =\textrm{div}_{\hat{\nabla }}\) on all of \({\mathfrak {X}}\) and given \(X\in {\mathfrak {X}}\), we define \(X^* \in {\mathfrak {X}}\) for \(\omega \in \Omega ^1\) by
Then,
-
(1)
\((a\,X)^* =X^*a^*\) and \((Xa)^* =a^*\, X^*\),
-
(2)
\(\phi (X^* (\omega ^*))=\phi (X(\varsigma (\omega )))^*\),
-
(3)
\(\textrm{div}(X^* ) = \textrm{div}(X)^*\),
-
(4)
\(X^{**}=X\),
-
(5)
\(X\in {\mathfrak {X}}\) is real if and only if \(X^*=\varsigma \circ X\circ \varsigma ^{-1} \),
-
(6)
\(\textrm{div}(\varsigma \circ X\circ \varsigma ^{-1})=\varsigma ( \textrm{div}(X))\),
-
(7)
if \(X\in {\mathfrak {X}}\) is real then \(\textrm{div}(X)^* = \varsigma ( \textrm{div}(X))\).
Proof
A brief check shows that \( X^*(a\,\omega )= a\,X^*(\omega )\) for all \(a\in A\) so \(X^*\in {\mathfrak {X}}\). Next
which checks (1). For (2), we set \(\omega =\textrm{d}a.b\) and
By definition of a bimodule connection, we have
and using this
as required. For part (3), using the fact that \(\phi \) of a divergence is zero and Eq. (12),
For part (4), we have, using part (3) and Eq. (12),
and, as both X and \(X^{** }\) are left module maps, this means that they agree on all of \(\Omega ^1\). For part (5), first note for \(X\in {\mathfrak {X}}\) we also have \(\varsigma \circ X\circ \varsigma ^{-1}\in {\mathfrak {X}}\). Now, if \(X^*=\varsigma \circ X\circ \varsigma ^{-1} \), we have
and then part (2) shows that X is real. Now, we suppose that X is real, so for all \(\omega \in \Omega ^1\) and \(a\in A\) we have, using parts (2) and (4),
and then nondegeneracy of \(\phi \) shows that \(X^*=\varsigma \circ X\circ \varsigma ^{-1} \). Now for part (6),
Finally, part (7) is a combination of parts (3), (5) and (6). \(\square \)
Definition 4.8
In the context of Theorem 4.7, we define \(\phi \,\textrm{rev}: {\mathfrak {X}}\mathop {{\otimes }}_A \Omega ^1\rightarrow {\mathbb {C}}\) by
Note that \(\phi \,\textrm{rev}\) is well defined because
even though the hypothetical map \(\textrm{rev}:{\mathfrak {X}}\mathop {{\otimes }}_A \Omega ^1\rightarrow A\) is not well defined. Also, we have
Thus, \(\phi \,\textrm{rev}: {\mathfrak {X}}\mathop {{\otimes }}_A \Omega ^1\rightarrow {\mathbb {C}}\) is actually defined on the twisted cyclic tensor product \(({\mathfrak {X}}\mathop {{\otimes }}_A \Omega ^1)/\sim \) where \(X\mathop {{\otimes }}\omega \,a \, \sim \, \varsigma (a)X\mathop {{\otimes }}\omega \).
Proposition 4.9
In the context of Theorem 4.7, for all \(X\in {\mathfrak {X}}\) and \(\omega \in \Omega ^1\), we have
Proof
First note that \(\phi \,\textrm{ev}\,\hat{\sigma }: {\mathfrak {X}}\mathop {{\otimes }}_A \Omega ^1\rightarrow {\mathbb {C}}\) is also well defined on the twisted cyclic tensor product. It is then enough to show the equality above for \(\omega =\textrm{d}a\) with \(a\in A\). Then,
Next we have, using \(X^{**}=X\) and the definition of \(X^*\), that
and then the previous result gives the second part of the statement. \(\square \)
We will also need the following lemma.
Lemma 4.10
We assume the conditions to Theorem 4.7 and X is real as in Definition 4.5. Then,
-
(1)
\(\phi \big ( X(\textrm{id}\mathop {{\otimes }}X)(\eta \mathop {{\otimes }}\lambda ) \big ){}^* =\phi \big ( X(\textrm{id}\mathop {{\otimes }}X)(\lambda ^*\mathop {{\otimes }}\eta ^*) \big )\),
-
(2)
\(\phi \big ( (\textrm{div}(X).X)(\omega ) \big ){}^* = \phi \big ( (X.\textrm{div}(X))(\omega ^*) \big ) \),
-
(3)
\(\phi \big (X(\textrm{d}\, X(\omega ))\big )= - \phi \big ((X.\textrm{div}(X))(\omega ) \big ) \) for all \(\omega ,\eta , \lambda \in \Omega ^1\).
Proof
For (1), using the assumption that X is real, we have
For (2), we use
Finally, \(\phi \big (X(\textrm{d}\, X(\omega ))\big )= - \phi \big ( X(\omega )\,\textrm{div}(X) \big ) = - \phi \big ( (X.\textrm{div}(X))(\omega ) \big )\) proves (3). \(\square \)
4.3 \(*\)-Preserving connections and compatibility with quantum geodesic flow
This subsection will justify the definition of the \(*\)-operation in Theorem 4.7 and the assumptions leading up to it.
Corollary 4.11
If \(\int :A\rightarrow {\mathbb {C}}\) meets the conditions for \(\phi \) in Theorem 4.7, and \(X\in {\mathfrak {X}}\) is real with respect to \(\int \), then both halves of the unitarity conditions (9) hold with \(\kappa =\textrm{div}(X)/2\).
Proof
The first half of (9) follows from the definition of divergence and the following equation
for all \(a\in A\) and \(X\in {\mathfrak {X}}\), where we have used Theorem 4.7 part (7). The second half of (9) is just the definition of X real. \(\square \)
Next, if we have a \(*\)-operation on an A-bimodule, then we have a natural ‘reality’ or \(*\)-preserving condition on any bimodule connection on it. We only need here the case of linear connections where the bimodule is \(\Omega ^1\) or its dual \({\mathfrak {X}}\). In the former case, the standard condition [2] can be written as
where the left and right connections are related as in (3). In this context, \(\sigma \) is necessarily invertible with \(\sigma \,\dagger \, \sigma \,\dagger =\textrm{id}\). Similarly on other bimodules with \(*\)-structure, including \({\mathfrak {X}}\). So far, \(\hat{\nabla }\) is any left bimodule connection on \({\mathfrak {X}}\) but henceforth we assume it is the left version of the right connection \(\nabla _{\mathfrak {X}}\),
where \(\nabla _{\mathfrak {X}}\) is dual to a left connection \(\nabla ^L\), corresponding to \(\nabla \) on \(\Omega ^1\) as at the end of Sect. 2.1. Now, we can check that Theorem 4.7 is fit for purpose in singling out a suitable reality condition for geodesic vector fields.
Corollary 4.12
Suppose the conditions of Theorem 4.7 with \(\hat{\nabla }\) obtained from a \(*\)-preserving bimodule connection \(\nabla \) on \(\Omega ^1\) as in (14). If X(t) obeys the geodesic velocity Eq. (7) and the initial vector field X(0) is real, then \(\dot{X}\) is real if and only if, for all \(\omega \in \Omega ^1\) and all time t (we suppress the explicit t dependence of X for clarity),
Moreover, this is true if and only if
where \(\sigma _{{\mathfrak {X}}{\mathfrak {X}}}\) is defined by
for all \(\omega ,\eta \in \Omega ^1\) and \(Y,Z\in {\mathfrak {X}}\).
Proof
From the geodesic velocity equation and then Lemma 4.10(3), if X(t) is real, then we have at time t,
If we write \(\nabla \omega =\eta \mathop {{\otimes }}\lambda \), then Lemma 4.10(1) and (2) give
with the last integral needing to vanish for reality. We then swapped \(\omega \leftrightarrow \omega ^*\) for presentation of the result. Next, we set \(Y\mathop {{\otimes }}Z=(\textrm{id}-\sigma _{{\mathfrak {X}}{\mathfrak {X}}}{}^{-1})(X\mathop {{\otimes }}X)\) and the integral condition is equivalent to
for all \(\omega \in \Omega ^1\). Now, apply this to \(a\omega \) for arbitrary \(a\in A\) to get
By nondegeneracy, we deduce that \(\textrm{div}( Y(\omega ) Z) - \textrm{ev}(\textrm{id}\mathop {{\otimes }}\textrm{ev}\mathop {{\otimes }}\textrm{id})(\nabla ^L(\omega )\mathop {{\otimes }}Y\mathop {{\otimes }}Z) =0\), or
where we have used the dual connection \(\nabla _{\mathfrak {X}}\) to \(\nabla ^L\). \(\square \)
Note that (15) is weaker than the original auxiliary braid condition \(\sigma _{{\mathfrak {X}}{\mathfrak {X}}}(X\mathop {{\otimes }}X)=X\mathop {{\otimes }}X\) and provides a kind of improved auxiliary condition, as the previous one was unnecessarily restrictive. Corollary 4.12 gives this as necessary and sufficient for reality of the velocity field in the sense of Theorem 4.7 at all times. In practice, we can assume that \(X,\dot{X}\) are real in this sense and apply \(*\) to both sides of the geodesic velocity equations. Comparing with the original velocity equation then gives the improved auxiliary condition as an additional restriction on the space of velocity fields, and we then solve the two together. This method will give all real solutions of the velocity equations. We are also free to further restrict our solutions by adopting a particular ansatz, in which case we can solve assuming the ansatz but if the differential equation on the ansatz is not consistent, then the time evolved solution will leave the region where the ansatz is valid.
4.4 Quantum convected derivative of the divergence
We start with a quantum analogue of the rate of change of a function along a path parameterised by time t, where the velocity of the path is given by the vector field X.
Definition 4.13
For a function \(a:{\mathbb {R}}\rightarrow A\) and a time-dependent left vector field X, we define
This is more symmetric than if we had applied X only on one side, but there is a more concrete reason why we have to make this definition. Recall from Theorem 4.7 part (7) that the divergence of a real vector field obeys the twisted reality condition \(a^*=\varsigma (a)\).
Proposition 4.14
Let a be a time-dependent element of A obeying the twisted reality condition \(a^*=\varsigma (a)\) and X a time-dependent real left vector field. If \(\textrm{ev}\,\hat{\sigma }( \varsigma \circ X \circ \varsigma ^{-1} \mathop {{\otimes }}\varsigma \,\omega ) =\varsigma \,\textrm{ev}(X\mathop {{\otimes }}\omega )\), then \(\frac{Da}{Dt}\) obeys the twisted reality condition.
Proof
Using the definition of \(X^*\) in Theorem 4.7, we get
and
as required. \(\square \)
Proposition 4.15
Let \(\hat{\nabla }\) be obtained from a \(*\)-preserving bimodule connection \(\nabla \) on \(\Omega ^1\) as in (14). If X is a time-dependent left vector field X obeying the geodesic velocity equation, then
Proof
We set \(\kappa =\tfrac{1}{2} \textrm{div}_{\hat{\nabla }} X \) in the main part of the geodesic velocity equation,
and calculating its divergence using \( \textrm{div}_{\hat{\nabla }} Y=\textrm{ev}\sigma ^{-1}_{\mathfrak {X}}\nabla _{\mathfrak {X}}Y\) gives
The convected derivative from Definition 4.13 gives
where we set \({{\tilde{\textrm{ev}}}}=\textrm{ev}\circ \sigma ^{-1}_{\mathfrak {X}}\). Then,
where
giving the result. \(\square \)
The last term of this formula for the convective derivative of \(\textrm{div}(X)\) corresponds to the ‘kinetic energy’ or trace of \((\nabla _{\mathfrak {X}}X)^2\) term in the classical formula Proposition 3.2. We now give a noncommutative version of this for a vector field adapted to behave well with respect to \(*\).
Proposition 4.16
If \(\nabla \) is \(*\)-preserving and the conditions of Theorem 4.7 hold and \(\nabla \circ \varsigma =(\varsigma \mathop {{\otimes }}\varsigma )\circ \nabla \), then the ‘kinetic energy’ function
sends real vector fields to twisted hermitian elements of the algebra.
Proof
We set \(\nabla _{\mathfrak {X}}X=Y_i\mathop {{\otimes }}\xi _i\) for \(i=1,2\) as two independent expressions for it. Now,
If X is real then the result follows from this, as \(\varsigma \mathop {{\otimes }}\varsigma \) commutes with \(\sigma \) and \(\textrm{ev}(\varsigma \mathop {{\otimes }}\varsigma )=\varsigma \,\textrm{ev}\), and similarly for \({{\tilde{\textrm{ev}}}}\). \(\square \)
As a result, we can write
where
plays the role classically of the quadratic form \(X^k\,X^r \,R_{kr}\) on X featuring in Proposition 3.2 for the convective derivative of \(\textrm{div}(X)\). By construction, if \(X_t\) is initially real and obeys the secondary condition in Corollary 4.12 to stay real as it evolves, then R(X) will likewise be a twisted hermitian element of the algebra, because the other parts of (19) are. We therefore propose it as a ‘quadratic form’ version of the Ricci tensor derived from looking at geodesic velocity vector fields but applicable on any \(X\in {\mathfrak {X}}\).
Corollary 4.17
If \(X_t\) obeys the geodesic velocity equation, then
Proof
We use (19) in
\(\square \)
5 Quantum geodesics on \(M_2({\mathbb {C}})\)
We take \(M_2({\mathbb {C}})\) with its standard differential calculus \(\Omega =M_2({\mathbb {C}}) [s,t]/\langle s^2,t^2\rangle \), where s and t are central and \(\textrm{d}f=(\partial _sf)s+(\partial _tf)t\) is given on\(f\in M_2({\mathbb {C}})\) by
The calculus is inner with \(\theta =E_{12}s+E_{21}t\), and \(\textrm{d}\) on higher forms is likewise given by a graded commutator, in particular
There is a natural \(*\) structure \(s^*=-t\), and we take lift \(i(st)= {1\over 2}(s\mathop {{\otimes }}t+ t\mathop {{\otimes }}s)\). Here, \(i((st)^*)=i(st)=i(st)^\dagger \) so commutes with \(*\) rather than anticommuting as required to ensure the usual reality properties of Ricci. Metrics are given by four complex coefficients in the tensor product basis with condition for ‘reality’ \(g^\dagger =g\) of the metric, see [2]. Here, we consider just the metric
as a sample in this moduli space. The QLCs for this are not unique but there is a natural 3-parameter moduli of inner connections defined solely by the generalised braiding as a bimodule map [2, p. 776]
where the conventions are such that the second row gives the coefficients of \(\sigma _L(s\mathop {{\otimes }}t)\) in basis order \(s\mathop {{\otimes }}s\), \(s\mathop {{\otimes }}t \), \(t\mathop {{\otimes }}s\), \(t\mathop {{\otimes }}t\). This corresponds to the left connection on \(\Omega ^1\) given by
which defines the Christoffel symbols \(\Gamma ^a{}_{bc}\) for \(a,b,c\in \{s,t\}\). The connection is \(*\)-preserving which entails \(\sigma \dagger \sigma =\dagger \), which is when \(\bar{\rho }=-\rho ,\nu =\bar{\mu }\).
The dual right connection on \({\mathfrak {X}}\) is then given by \(\nabla _{\mathfrak {X}}f_e=\Gamma ^a{}_{be} \, f_a\mathop {{\otimes }}b\). For the basis order \(s\mathop {{\otimes }}f_s\), \(s\mathop {{\otimes }}f_t\), \(t\mathop {{\otimes }}f_s\), \(t\mathop {{\otimes }}f_t\) on \(\Omega ^1\mathop {{\otimes }}{\mathfrak {X}}\) and \(f_s\mathop {{\otimes }}s\), \(f_s\mathop {{\otimes }}t\), \(f_t\mathop {{\otimes }}s\), \(f_t\mathop {{\otimes }}t\) on \({\mathfrak {X}}\mathop {{\otimes }}\Omega ^1\) and using the same conventions as (20), its braiding is therefore
Proposition 5.1
The geometric divergence for the above inner connections agrees with the state divergence for a nondegenerate positive linear functional \(\phi \) if and only if \(\mu =\nu =0\) and \(\phi ={1\over 2}\textrm{Tr}\). Then, \(\textrm{div}(f_s X^s+f_t X^t)=[E_{12},X^s]+ [E_{21},X^t]\) on a vector field in \({\mathfrak {X}}\) with components in a dual basis \(f_s,f_t\). Moreover, \(f_s^*=-f_t\).
Proof
We first calculate \(\hat{\nabla }\), the details of which are omitted. This then gives
where \(f_s,f_t\) are the dual basis vector fields in \({\mathfrak {X}}\). For comparison, if we set \(\phi (a)=\textrm{Tr}(aN)\) for N a trace 1 positive matrix which is invertible for \(\phi \) to be nondegenerate, then the state divergence is
and the only case where these coincide is \(N=\tfrac{1}{2} I_2\) and \(\mu =\nu =0\). Hence, we restrict now to this one-parameter moduli space given by \(\rho \) where the geometric divergence and the \(\phi \)-divergence coincide, with \(\phi ={1\over 2}\textrm{Tr}\). For the \(*\)-structure on \({\mathfrak {X}}\) in Theorem 4.7, we proceed with \(\mu =\nu =0\) and using
we have
and similarly for \(f_t\). \(\square \)
In view of this lemma, we now take \(\int ={1\over 2}\textrm{Tr}\) as our preferred state. Note that there is also a significant 4-parameter moduli of QLCs with \(\sigma =-\textrm{flip}\) on the basis elements and admitting a bimodule map \(\alpha :\Omega ^1\rightarrow \Omega ^1\mathop {{\otimes }}_A\Omega ^1\) going beyond the inner case [2, Exercise 8.3]. Our analysis above can be extended to this wider class as well as repeated for other metrics.
5.1 Ricci quadratic form for general \(\rho \)
Proceeding with \(\mu =\nu =0\), we still have a 1-parameter moduli of QLCs,
where \(\rho \) is an imaginary parameter. The curvature is
The usual Ricci tensor defined by the canonical lift i is [2, Eqn. (8.21)]
which is still hermitian with the \(*\)-structures (even though i is not suitably antihermitian), but not quantum symmetric. Here, \(\rho =\pm \imath \) gives a pair of natural flat QLCs on \(M_2({\mathbb {C}})\). We aim to contrast this with what we get for the Ricci quadratic form.
From the above, the dual right connection on vector fields now simplifies to
In what follows, we adopt an index notation with \(a=s,t\) and
so that \(\nabla _{{\mathfrak {X}}} X=f_a\mathop {{\otimes }}b D_bX^a\) if \(X= f_s X^s+ f_t X^t\in {\mathfrak {X}}\), where we sum over repeated indices.
Proposition 5.2
\(\nabla \hspace{-6.111pt}\nabla ({{\tilde{\textrm{ev}}}})=0\). Moreover, writing \(Y_{ab}=D_bX^a\) for brevity,
where
Proof
We first calculate, with \(\hat{\nabla }=\sigma ^{-1}_{\mathfrak {X}}\nabla _{\mathfrak {X}}\),
giving F(X) as stated. Next, we calculate
and as it is a right module map, we only need to evaluate it on \(f_a\mathop {{\otimes }}b\) for \(a,b\in \{s,t\}\). First \(\textrm{d}\,{{\tilde{\textrm{ev}}}}(f_a\mathop {{\otimes }}b)=0\) and then, summing over repeated indices
Now using the formula for \(\sigma _L\), for example,
and substituting for the Christoffel symbols and looking at the other cases give \(\nabla \hspace{-6.111pt}\nabla ({{\tilde{\textrm{ev}}}})=0\) as claimed. Next, we calculate
in several parts. We start with
and evaluating this against X gives
Now, R(X) consists of this plus \(-\rho \,(Y_{ts}Y_{ss} + Y_{ss} Y_{ts}- Y_{tt}Y_{st}-Y_{st}Y_{tt}) - \rho ^2\, ( (Y_{st}+Y_{ts})^2-(Y_{ss}+Y_{tt})^2)\) as already computed for F(X), giving R(X) as stated. Explicitly,
which one can further compute in terms of the entries of \(X^s,X^t\). \(\square \)
If \(\rho =0\), then we see that R(X) agrees with contraction against the Ricci curvature tensor (23), bearing in mind that the latter is \(-{1/2}\) of the classically normalised one. But for \(\rho \ne 0\), we see that the two approaches are a little different in this example.
5.2 Quantum geodesic flow equations on \(M_2({\mathbb {C}})\)
As before, we write \(X=f_s X^s+ f_t X^t\) but with components now time dependent, and we set
along with preferred state \(\int ={1\over 2}\textrm{Tr}\) in view of Proposition 5.1. The reality condition on vector fields from Theorem 4.7 comes down to
since \(\varsigma =\textrm{id}\), while the geodesic velocity equation is
We have
and thus
We first look at the content of the original auxiliary braid condition in [5] which is sufficient but not necessary for real geodesic evolution.
Lemma 5.3
If \(X\in {\mathfrak {X}}\) is real, then \(\sigma _{{\mathfrak {X}},{\mathfrak {X}}}(X\mathop {{\otimes }}X)=X\mathop {{\otimes }}X\) holds only if \(X=0\).
Proof
Looking at the coefficients of \(\sigma _{{\mathfrak {X}},{\mathfrak {X}}}(X\mathop {{\otimes }}X)-X\mathop {{\otimes }}X=0\), we get one entry \(\rho (X^s X^t+X^t X^s)=0\), so if \(\rho \ne 0\), then \(X^s X^t+X^t X^s=0\). There is another entry \(-(X^s X^t+X^t X^s)+\rho (X^s X^s+X^t X^t)=0\), so if \(\rho =0\) we still get \(X^s X^t+X^t X^s=0\). In the case of real X, this means \(X^s{}^*X^s+X^sX^s{}^*=0\) which requires \(X^s=X^t=0\). \(\square \)
Thus, this condition is too strong. Instead, we proceed with X real but the minimal ‘improved auxiliary condition’ on it such that the flow remains real. This is obtained by applying \(*\) to the equation for \(\dot{X}^s\) and requiring to get the equation for \(\dot{X}^t\), and comes down to
on remembering that \(\rho \) is imaginary. If \(\rho =0\), then we need \(E_{12}\) to anticommute with \(\{X^s,X^s{}^*\}\), which is a positive operator and hence must be real and symmetric. One can show that this requires \(\{X^s,X^s{}^*\}=0\), so we are back with the original auxiliary braid condition case. Therefore, real solutions in the sense \(X^s{}^*=-X^t\) at all times t can exist only with \(\rho \ne 0\).
After solving for X, we then solve the amplitude flow equation \(\nabla _E\psi =0\) for \(\psi (t)\in M_2({\mathbb {C}})\), which amounts to
5.3 Quantum geodesic flows for \(\rho =\imath \)
The choice \(\rho =\imath \), although flat, seems to be a natural choice after we excluded \(\rho =0\), and we solve this here. We first solve the improved auxiliary Eq. (26) with a 4-parameter solution
We now let these parameters vary in time and find that (24) is
which is simple harmonic motion. Hence, we have a 4-parameter geodesic velocity field
for initial values \(\alpha ,\beta ,\gamma ,\delta \) of a, b, c, d, respectively.
Relative to this, we have to solve the amplitude flow equation (27) where
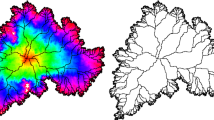
A numerical solution for \(\alpha =\gamma =\delta =1, \beta =0\) and \(\psi (0)=\textrm{id}\) of the identity matrix is shown in Fig. 1. One can check to within numerical accuracy that the off-diagonal entries of \(\psi \) vanish at \(t=n\pi /4\) for all odd n in the range and at these points \(\textrm{Im}(\psi _{11})=\textrm{Re}(\psi _{22})\). Meanwhile, at \(t=n\pi /2\) for all n in range, one has \(\psi _{11}=\psi _{22}\), \(\psi _{12}=(-1)^n\bar{\psi }_{21}\) and \(\psi _{12}=r_n e^{(-1)^n{\pi \imath \over 4}}\) for real \(r_n\). We have marked \(t=\pi /4\) and \(t=\pi /2\) as examples. Looking from a coarser perspective out to large t, we also see that the diagonal entries of \(\psi \) precess in an approximate circle, while the off-diagonal entries remain near to 0 and repeatedly return to it. This reflects the initial starting point. One can further check that while the squared absolute values of the 4 entries of \(\psi \) clearly vary in time (as the square of the distance from the origin in the complex plane), their sum remains constant at 2, in line with our probabilistic interpretation with respect to \(\int ={1\over 2}\textrm{Tr}\).

Quantum geodesic on \(M_2({\mathbb {C}})\) with its flat connection \(\rho =\imath \) and a geodesic vector field given by \(\alpha =\gamma =\delta =1, \beta =0\). We plot the matrix entries on the complex plane of the resulting amplitude flow \(\psi (t)\in M_2({\mathbb {C}})\) with initial \(\psi (0)=\textrm{id}\). The outer curves are the diagonal entries and the inner ones off-diagonal
6 Quantum geodesics on the fuzzy sphere
The fuzzy sphere or coadjoint quantisation as an orbit in \(su_2^*\) is the algebra
where \(0\le \lambda _p<1\) is a real deformation parameter. We use the 3D calculus recently introduced in [2, Example 1.46] with central basis \(s^i\), \(i=1,2,3\) with
The calculus is inner (in degree 1 only) with
so that the partial derivatives are the ‘orbital angular momentum’ derivations
The natural exterior algebra is
but note that this is no longer inner in higher degree by \(\theta \). The \(*\)-structure is \(x_i,s^i\) self-adjoint and the canonical lift from 2-forms is \(i(s^i\wedge s^j)={1\over 2}(s^i\mathop {{\otimes }}s^j-s^j\mathop {{\otimes }}s^i)\) as classically.
A general quantum symmetric metric has the form \(g=g_{ij}s^i\mathop {{\otimes }}s^j\) for \(g_{ij}\) a positive real symmetric matrix, and a left connection takes the form (dropping the \(1\over 2\) factor compared to the definition of \(\Gamma \) in [13]),
for some coefficients \(\Gamma ^i{}_{jk}\) which we assume for simplicity to be constants (multiples of the identity \(1\in A\)). We have a bimodule connection with \(\sigma _L\) just the flip on the basis, and for the connection to be \(*\)-preserving, we then need \(\Gamma ^i{}_{jk}\) to be real. We do not limit ourselves to a QLC, but the latter was found in [13] to be unique among such connections, namely
The torsion for a general connection in our class is
which can be shown to vanish for the QLC. The Riemann curvature for a general connection has the form
and the Ricci curvature the form
albeit in our constant case we do not need the derivative terms. Its value for the QLC is computed in [13] which then gives the scalar curvature in this case as
If we introduce the (central) basis \(f_i\) for left vector fields which is dual to the \(s^i\), then the right connection dual to the previous left connection is
with \(\sigma _{\mathfrak {X}}\) the flip among the \(f_i\) and \(s^j\). This implies on a left vector field \(X=f_k X^k\),
where
We also need a natural state, and here, we use \(\int :A\rightarrow {\mathbb {C}}\) defined by an expansion in terms of noncommutative spherical harmonics [1] (as the \(SU_2\)-invariant component). This is known to be a trace and was used recently in the construction of the Dirac operator on the fuzzy sphere [14].
Proposition 6.1
The geometric divergence and the \(\int \)-divergence agree on the fuzzy sphere if \(\Gamma ^i{}_{ij}=0\) for all j, which includes the case of the QLC. In this case, \(\textrm{div}(f_kX^k)=\partial _k X^k\) and \(f_k^*=f_k\).
Proof
The inverse of \(\sigma _{\mathfrak {X}}\) is also the flip on the basis and gives the left connection \(\hat{\nabla }\), and hence, \(\textrm{div}_{\hat{\nabla }}(f_k) =\Gamma ^i{}_{jk}\delta _{ij}=\Gamma ^i{}_{ik}\), which vanishes for the QLC read off from (28). Then, \(\textrm{div}_{\hat{\nabla }}(f_ka)=\textrm{div}_{\hat{\nabla }}(af_k)=\textrm{ev}(\textrm{d}a\mathop {{\otimes }}f_k)=\partial _ka\) for any vector field \(f_ka\). Hence, from Proposition 4.4 for compatibility of the two types of divergence, we need
for any a, which holds as \(\int \) is a trace. Since \(s^j{}^*=s^j\), the \(*\)-operation in Theorem 4.7 is then as stated. \(\square \)
We proceed with connections where \(\Gamma \) obeys the condition in Proposition 6.1 so that we can use Theorem 4.7.
Proposition 6.2
On \(X=f_iX^i\) for \(X^i\in {\mathbb {C}}_\lambda [S^2]\), the kinetic form and the quadratic Ricci form are
Proof
Clearly, the two halves of F(X) are each half of
where \({\hat{\nabla }} X=\sigma ^{-1}_{\mathfrak {X}}\nabla _{\mathfrak {X}}X=D_j X^i s^j\mathop {{\otimes }}f_i\) as the \(s^i,f_j\) are both central so we can pull all coefficients to the left and \(\sigma _{\mathfrak {X}}\) is just the flip on the basis.
Being equal, these do not contribute to R(X). The first term of R(X) also vanishes as
using that \(\nabla \hspace{-6.111pt}\nabla ({{\tilde{\textrm{ev}}}}):{\mathfrak {X}}\mathop {{\otimes }}\Omega ^1\rightarrow \Omega ^1\) is a right module map and that, from (18),
It remains to calculate the middle term,
which we recognise as stated. In the first five lines, \(D_k\) acts like a covariant derivative only on the upper \(X^i\) index, e.g. when applied to \((D_l X)^i\). After that we expand out in terms of \(\Gamma \) and use \([\partial _i,\partial _m]={\epsilon }_{imj}\partial _j\) which we cancel with a part of \(D_jX^i{\epsilon }_{jim}\), to obtain the final expression. \(\square \)
We see that the quadratic form point of view coming from quantum geodesic flows in this example suggests a modified Ricci tensor
differing from the existing ‘lift and contract’ approach. Actually the effect of this extra term is merely to reverse the sign of the first term in (29) for the corresponding expression for \(R^{quad}\).
Next, we study the geodesic velocity equations. Given the above, and Theorem 4.7, we set
for the divergence of a vector field \(X=f_k X^k\in {\mathfrak {X}}\) and its reality property (since \(\varsigma =\textrm{id}\)). One can check that then \((\partial _jX^i)^*=\partial _jX^i\) also. For the velocity field equation, we first calculate
Then, the geodesic velocity equations in the form in Eq. (7) become
The auxiliary braid condition \(\sigma _{{\mathfrak {X}}{\mathfrak {X}}}(X\mathop {{\otimes }}X)=X\mathop {{\otimes }}X\) in [5] comes down to
while the most general ‘improved auxiliary condition’ needed to maintain reality of flow under the geodesic velocity equations is
This is obtained by applying \(*\) to (30) and comparing. Remember that \(\Gamma \) is assumed real and constant-valued (a multiple of the identity in the algebra) for a \(*\)-preserving connection in our context. We therefore solve both the geodesic velocity equation and (32). If we use the quantum Levi-Civita connection, then the torsion is zero.
After this, we have to solve for \(e\in A\mathop {{\otimes }}C^\infty ({\mathbb {R}})\) with respect to a chosen geodesic velocity field. Thus, we have to solve \(\dot{e} + X(\textrm{d}e)+ e \kappa =0\), which comes out as the amplitude flow equation
6.1 Quantum geodesic flow with \(X^i(t)\in {\mathbb {R}}1\) i.e. constant on the fuzzy sphere
The geodesic velocity Eq. (30) for the QLC and for constant coefficients \(X^i(t)\in {\mathbb {R}}1\) becomes
while both the auxiliary braid condition (31) and the improved one (32) hold automatically. The latter says that we can consistently keep \(X^i\) real. In the diagonal case \(g=\textrm{diag}(\lambda _1,\lambda _2,\lambda _3)\), we have
where \(\sum \mu _i+\mu _1\mu _2\mu _3=0\) and the \(\mu _i\) depend on the \(\lambda _i\) up to an overall scale, i.e. on \((\lambda _i)\in {\mathbb {R}}\mathbb {P}^2\). The velocity equation has solutions in terms of Jacobi elliptic sn and cn functions. For example, if \(\mu _1<0< \mu _2\), then
are real solutions, where we assume that the ellipticity parameter
is nonzero (which is if and only if the \(\lambda _i\) are all distinct). Here, \(c_1,c_2>0\) are parameters and t is in a certain interval containing 0. Note that if we chose the \(\mu _i\), then the corresponding metric up to an overall normalisation is
so this is positive only when \(\mu _1<1, \mu _2>-1,\mu _1\mu _2>-1\). Figure 2 gives an example like this where \(\mu _1=-\tfrac{1}{2}\), \(\mu _2=1\), so that \(\mu _3=-1\) and \(g=\textrm{diag}(4,3,1)\) is the metric up to normalisation. We take \(c_1=c_2=1\), and we have \(\mu =-\tfrac{1}{2}\), so
which is real and valid for all t, being periodic with period approximately 5.66 and initial value \(\vec X(0)=(0,1,\sqrt{2})\).

Quantum geodesic on the fuzzy sphere with metric \(g=\textrm{diag}(4,3,1)\). On the left is an example of a time-dependent geodesic velocity field \(X=f_iX^i(t)\) for this metric starting at \(\vec X(0)=(0,1,\sqrt{2})\). On the right is the flow this generates for a function of the form \(e=\psi ^i(t)x_i\) starting at \(\vec \psi (0)=(1,0,0)\)
Next, we integrate (33) to find the amplitude flow for this X. We restrict attention to \(e=\psi ^ix_i\in su_3\mathop {{\otimes }}C^\infty ({\mathbb {R}})\) and then find that motion stays in this subspace of the fuzzy sphere. Hence, we are effectively integrating a time-varying infinitesimal rotation given by
which is easily solved numerically as shown also in Fig. 2 starting with \(\vec \psi =(1,0,0)\). Unitarity of the evolution means \(\int e^*e=\int \bar{\psi }^i\psi ^{j} x_ix_j=\vec {\bar{\psi }}\cdot \vec \psi (1-\lambda _p^2)\) so that a normalised \(\vec \psi \) stays normalised. Hence, motion here is necessarily on the unit sphere in field space. Clearly also, the curve crosses itself multiply, with the first two self-crossings as shown. When we look out to large t, we see (viewed from the side) two discs on the sphere where the curve does not enter. Other g, including with Lorentzian signature, generate a broadly similar picture. In our picture, the restricted Hilbert space is 3-dimensional and the vector \(|\psi \rangle =\vec \psi \) in it evolves in time t according to this quantum geodesic amplitude flow.
6.2 Quantum geodesic flows with the round metric and more general \(X^i\)
At the other extreme, we take the ‘round metric’ \(g_{ij}=\delta _{ij}\). Then,
and our improved auxiliary Eq. (32) and the consequently equivalent form of (30) are
The simplest solution is again \(X^i\in {\mathbb {R}}1\) as before, but this time, as \(\partial _jX^i=0\), we have that the \(X^i\) are also constant in time. So the velocity field is any fixed \(\vec X\in {\mathbb {R}}^3\). In this case, if we look for flows of the form \(e=\psi ^ix_i\) as we did before, we need \(\dot{\vec \psi }=-\vec X\times \vec \psi \), which evolves over time to a rotation about an axis along \(\vec X\). So the geodesic flows are circles in the space of states of this form, around any fixed axis \(\vec X\).
Looking for other real solutions in the full (nonreduced) fuzzy sphere is beyond our scope here as it leaves the algebraic setting and would require a completion. For example, if we try solutions of the constant plus linear form \(X^i=X^{ij}x_j+ f^i1\) with a real matrix \(X^{ij}\) and a real vector \(f^i\), then the improved auxiliary condition becomes
which has solutions for \(X^{ij}\), the largest part of the moduli space being 5-dimensional. For example, if \(X^{22}\ne 0\), then \(X^{12},X^{21},X^{23},X^{32}\) are free and
In fact both sides then vanish separately as well. However, the geodesic velocity equation becomes
which does not have generic solutions at the level of the algebra \({\mathbb {C}}_\lambda [S^2]\).
On the other hand, the quantum geometry also makes sense on the reduced fuzzy sphere where \(\lambda _p=1/n\) and we quotient by the kernel of the n-dimensional representation. For example, \(n=2\) reduces to the algebra of \(2\times 2\) matrices, but now with a 3D calculus not the one of Sect. 5. In this case, our algebra has the additional Pauli matrix relations.
Putting this in, the geodesic velocity equation becomes
where \(\times \) is the cross product of the 2nd index of X with the vector \(\vec f\) and \(\cdot \) is the dot product of the same with \(\kappa =\partial _iX^i/2\) viewed as a vector in \({\mathbb {R}}^3\).
Next, given any X obeying (34)–(35), we write \(e=\psi ^ix_i+{\phi \over 2}1\) and solve the amplitude flow equations for the vector plus scalar,
which gives us
with solution for the combined 4-vector
of the equation \(\imath {\textrm{d}\over \textrm{d}t}(\vec \psi ,\phi )=H (\vec \psi ,\phi )\) for H as stated. The latter is generically time dependent and P denotes a (time)-ordered exponential. Note that \(x_i,{1\over 2}\) all have the same norm with respect to the inner product defined by \(\int \), being a certain multiple of the matrix trace from the point of view of the reduced fuzzy sphere algebra A as a matrix algebra.
For the above 5-parameter moduli of solutions of (34), one has
so \(\vec f\) is a constant vector, and in that case the rows of X undergo a uniform rotation about the \(\vec f\) axis. Then,
This is time dependent if \(\vec f\ne 0\) (since then X is then time dependent) but a numerical solution is shown in Fig. 3 taking, without loss of generality, \(\vec f\) along the z-axis. Each row of the matrix X evolves as a circle about this axis, as shown for some random initial values. For the amplitude flow, we take initial values \(\vec \psi (0)=(1,0,0)\) and \(\phi (0)\) and plot the real part of the former. The imaginary part is similar. One can also plot \(\phi (t)\) and check to within numerical accuracy that \(|\phi |^2+\overline{\vec \psi }\cdot \vec \psi =1\), a constant of motion.

Quantum geodesic on reduced \(2\times 2\) matrix fuzzy sphere with metric round metric \(g=\textrm{diag}(1,1,1)\) and \(X^i=X^{ij}(t)x_j+f^i1\) with \(\vec f=(0,0,1)\) and a random initial X(0). We show the amplitude flow for \(e=\psi ^i(t)x_i+{\phi (t)\over 2}1\) starting at \(\vec \psi (0)=(1,0,0)\) and \(\phi (0)=0\)
7 Quantum geodesics on the q-sphere
The standard q-sphere is based on the q-Hopf fibration and hence a \(*\)-subalgebra of \({\mathbb {C}}_q[SU_2]\), which we write as generated by z, x with relations
in the conventions of [2, Lemma 2.34]. Its 2D differential calculus is inherited from the 3D calculus [26] on \({\mathbb {C}}_q[SU_2]\) and can be given in terms of \(\textrm{d}z,\textrm{d}z^*,\textrm{d}x\) and a relation between them. (Here, \(\Omega ^1\) is not free but a rank 2 projective module.) Its holomorphic/antiholomorphic decomposition \(\Omega ^1=\Omega ^{0,1}\oplus \Omega ^{1,0}\) (in fact a double complex) was obtained in [19] as an application of the theory of quantum frame bundles, see [2, Prop. 2.35] for details. The unique \({\mathbb {C}}_q[SU_2]\)-covariant quantum metric and its Levi-Civita connection were also introduced in [19], and later revisited in the modern bimodule QLC form [2, 4]. Explicitly,
for a certain lift \(i(\textrm{Vol})\in \Omega ^1\mathop {{\otimes }}_A\Omega ^1\), see [2, Sect. 8.2.3]. We take the standard real form for q real and \(x^*=x\).
In practice, however, it is much easier to work ‘upstairs’ within \(\Omega ^1({\mathbb {C}}_q[SU_2])\). We take the quantum group with its standard matrix of generators a, b, c, d and \(\Omega ^1\) free with basis \(e^\pm ,e^0\) and relations
where |f| is the grading defined by the number of a, c minus the number of b, d. We used the conventions in [2, Example 2.32]. We let \(\partial _\pm ,\partial _0\) be the ‘partial derivatives’ with respect to the basis as defined by \(\textrm{d}f=\partial _+ f e^++\partial _- f e^-+\partial _0f e^0\). Here, \(e^+{}^*=-q^{-1}e^-,\ e^-{}^*=-qe^+\) and \(e^0{}^*=-e^0\). On the q-sphere, we only need \(e^\pm \) (not \(e^0\)) and we have to insert the elements \(D^+=a\mathop {{\otimes }}d-q^{-1}c\mathop {{\otimes }}b\) and \(D^-=d\mathop {{\otimes }}a-q b\mathop {{\otimes }}c\) for formulae to then make sense in the tensor product. Thus, [2, Example 6.5],
where the prime denotes an independent copy and \(|\omega _\pm |=\mp 2\) so that \(\omega _\pm e^\pm \in \Omega ^1\). The dual basis to \(e^\pm ,e^0\) will be denoted \(f_\pm ,f_0\), and \(e^\pm , f_\pm \) provide dual bases for \(\Omega ^1\) on the q-sphere when suitably interpreted with the \(D^\pm \). The corresponding dual right connection on the left vector fields \({\mathfrak {X}}\) is
where \(|X^\pm |=\pm 2\) so that \(f_\pm X^\pm \) has degree zero, i.e. is a vector field on the q-sphere. The q-commutation relations for the basis of vector fields are \(f_\pm g=q^{-|g|}g\,f_\pm \). Note that the connection \(\nabla _{\mathfrak {X}}\) preserves the \(*\)-operation by default, since it vanishes on both \(f_\pm \) and \(f_{\pm }{}^*\).
We use the natural integration \(\int f\) for \(f\in {\mathbb {C}}_q[SU_2]\), which is known to be a twisted trace
and restricts to \({\mathbb {C}}_q[S^2]\) as
This was recently used in [7] for the Dirac operator on the q-sphere, and we use it now as our preferred state.
Proposition 7.1
The geometric divergence and the \(\int \)-divergence on the q-sphere agree, and if \(X=f_\pm X^\pm \) (summing over ±), then \(\textrm{div}(X)=q^{\mp 2} \partial _\pm X^\pm \). The \(*\) operation from Theorem 4.7 is \(f_+{}^*=-q^{-1} f_-\) and \(f_-{}^*=-q\,f_+\). The geodesic velocity equation for \(X=f_\pm X^\pm \) as a function of time is
Proof
To find the divergence, we need the corresponding left connection on \({\mathfrak {X}}\),
and then for \(X=f_\pm X^\pm \) we get, summing over ±,
since the product of the Ds in the formula for \( \hat{\nabla }(v^\pm f_\pm )\) simply gives 1. To show that \(\textrm{div}_{\hat{\nabla }}=\textrm{div}_{\int }\) by Proposition 4.4, we need to check for all \(X\in {\mathfrak {X}}\) that
The latter holds. (One can even define the integral by this property.)
We also have, in the upstairs notation, omitting the Ds,
and by substituting the partial derivatives, we find \(\sigma _{\mathfrak {X}}(e^{\pm '}\mathop {{\otimes }}f_\pm )=q^{\pm '2} f_\pm \mathop {{\otimes }}e^{\pm '}\). (Here, \({\pm '}\) and ± are independent signs.) Now,
giving the stated answer for \(f_\pm {}^*\).
From Eq. (7), the geodesic velocity equation is
where
as \(\textrm{div}(X)\) has degree 0. \(\square \)
The action of the twisting on the 1-forms is given by \(\varsigma (e^\pm )=q^{\mp 2}\,e^\pm \) and thus on their duals \(\varsigma (f_\pm )=\varsigma \circ f_\pm \circ \varsigma ^{-1}=q^{\pm 2}\,f_\pm \). Then, summing over ±,
and the condition for X to be real is that \(X^*=\varsigma (X)\), which is
so the reality condition on X is that
Proposition 7.2
On the q-sphere, the improved auxiliary condition for preservation of reality of a geodesic velocity field X is
Proof
We calculate for \(f\in A\),
and using this, applying \(*\) to the velocity equation in Proposition 7.1 gives
and assuming that X is real gives
which can be rewritten as
Subtracting this from the original equation in Proposition 7.1 gives the result stated. \(\square \)
After solving this and the velocity equations together to find suitable \(X_t\), we then have to solve for \(e_t\in {\mathbb {C}}_q[S^2]\) obeying the amplitude flow equation \(\nabla _E e=0\), which now appears as
This derives the various quantum geodesic equations on the q-sphere. Actual solutions will be given elsewhere, possibly at lower deformation order after understanding classical geodesic flows better in our formalism.
8 Concluding remarks
We have refined the formalism of quantum geodesics to include a prescription for the all-important \(*\) operation on vector fields, which was previously not canonical. Provided the ‘measure’ or positive linear functional \(\int \) is a twisted trace (e.g. an actual trace in the usual sense), we provided a canonical construction, making the application of the formalism much more straightforward. We also saw that the original auxiliary braid condition (8) was too strong, understood its role in preservation of the reality of geodesic velocity field as it evolves and provided a general construction in Sect. 2 for the minimal such condition that does this. The possibility of an external driving force bimodule map \(\alpha \) or left quantum vector field Y arises naturally in this context as something to be set to zero. Applications with these nonzero are a direction for further work suggested here.
The formalism was then checked out in our three nontrivial examples, each with its own section. The example of quantum geodesics on \(M_2({\mathbb {C}})\) with its 2-dimensional calculus and metric \(g=s\mathop {{\otimes }}s+t\mathop {{\otimes }}t\) was given in detail only for a specific flat QLC at \(\rho =\imath \). Other \(\rho \) here could equally well be looked at. Moreover, this is just one metric on \(M_2({\mathbb {C}})\) and another with an equally rich known moduli space of QLCs is \(g=s\mathop {{\otimes }}t-t\mathop {{\otimes }}s\) in [2, Example 8.21]. The fuzzy sphere case was also found to work much as expected but geodesic flows in general were quickly found to be nonpolynomial in the algebra generators, i.e. would need a functional analytic treatment beyond our scope here (but hardly surprising). However, the theory reduces to the finite-dimensional quotient fuzzy spheres and we solved for geodesics on the lowest dimension nontrivial \(M_2({\mathbb {C}})\) fuzzy sphere (but with a different, 3-dimensional calculus). Higher spin reductions and the full theory using \(C^*\)-algebras would be an important, but not easy, topic for further work. We also did the work of setting up the velocity equations, etc., for the standard \({\mathbb {C}}_q[S^2]\), but we did not actually solve these as even the classical case here needs to be much better understood. Here, working ‘upstairs’ on \({\mathbb {C}}_q[SU_2]\) in the q-Hopf fibration amounts to the velocity vector field components \(X^\pm \) being sections of the q-monopole bundle of charges \(\pm 2\).
We also made and explored a new approach to the Ricci tensor now as a kind of ‘quadratic form’ on vector fields. This is motivated by the convective derivative of \(\textrm{div} X\) in the case where X is a geodesic velocity field, but the resulting R(X) is defined for any left quantum vector field \(X\in {}_A\textrm{hom}(\Omega ^1,A)\) and studied as such in our examples. In both the matrix and fuzzy sphere cases, we saw some aspects in line with our earlier ‘working definition’ for Ricci [2] but with additional terms, see notably Proposition 6.2. This should be similarly explored on a larger variety of curved quantum spacetimes, including the discrete n-gon \({\mathbb {Z}}_n\) with lengths on the edges providing the known quantum Riemannian geometry here, or on noncommutative black hole and FLRW cosmological models as in [1].
More widely, the theory of quantum geodesics should be developed to include geodesic deviation. We have set this up in Sect. 3.2 at the classical level. In fact, our approach provides a new way of thinking about geodesics even on a classical manifold, which deserves to be developed much further as a new tool in ordinary GR. It is also the case that, throughout the paper, we took \(B=C^\infty ({\mathbb {R}})\) for the geodesic parameter space. The same formalism with \(B=C^\infty (N)\) provides a theory of ‘totally geodesic submanifolds’ of a classical or quantum space expressed in the algebra A. This remains to be explored as does the construction of examples where B is some other quantum geometry. As such, it need not even have a ‘manifold dimension’ or could be finite (i.e. the algebra B could be finite-dimensional). We do not know if such generalisations would be interesting but the point is that the abstract approach to geodesics based on A-B-bimodule connections and \(\nabla \hspace{-6.111pt}\nabla (\sigma _E)\) is both powerful and little explored even in classical geometry. These are some of many possible directions for further work.
Data availability
Data sharing is not applicable as no datasets were generated or analysed during the current study.
References
Argota-Quiroz, J., Majid, S.: Fuzzy and discrete black hole models. Class. Quantum Grav. 38(36), 145020 (2021)
Beggs E.J., Majid, S.: Quantum Riemannian geometry. In: Grundlehren der mathematischen Wissenschaften, vol. 355. Springer (2020)
Beggs, E.J.: Noncommutative geodesics and the KSGNS construction. J. Geom. Phys. 158, 103851 (2020)
Beggs, E.J., Majid, S.: *-compatible connections in noncommutative Riemannian geometry. J. Geom. Phys. 61, 95–124 (2011)
Beggs, E.J., Majid, S.: Quantum geodesics in quantum mechanics. arXiv:1912.13376 [math-ph]
Beggs, E.J., Majid, S.: Gravity induced by quantum spacetime. Class. Quantum Grav. 31(39), 035020 (2014)
Beggs, E.J., Majid, S.: Spectral triples from bimodule connections and Chern connections. J. Noncomm. Geom. 11, 669–701 (2017)
Connes, A.: Noncommutative Geometry. Academic Press Inc, San Diego (1994)
Connes,A., Marcolli, M.: Noncommutative geometry, quantum fields and motives. In: AMS Colloquium Publications, vol. 55. Hindustan Book Agency (2008)
Doplicher, S., Fredenhagen, K., Roberts, J.E.: The quantum structure of spacetime at the Planck scale and quantum fields. Commun. Math. Phys. 172, 187–220 (1995)
Dubois-Violette, M., Michor, P.W.: Connections on central bimodules in noncommutative differential geometry. J. Geom. Phys. 20, 218–232 (1996)
Hooft, G.T.: Quantization of point particles in \(2+1\) dimensional gravity and space–time discreteness. Class. Quantum Grav. 13, 1023 (1996)
Lira-Torres, E., Majid, S.: Quantum gravity and Riemannian geometry on the fuzzy sphere. Lett. Math. Phys. 111(29), 21 (2021)
Lira-Torres, E., Majid, S.: Geometric Dirac operator on the fuzzy sphere. Lett. Math. Phys. 112, 10 (2022)
Liu, C., Majid, S.: Quantum geodesics on quantum Minkowski spacetime. J. Phys. A 55(35), 424003 (2022)
Madore, J.: The fuzzy sphere. Class. Quantum Grav. 9, 69–88 (1992)
Majid, S.: Hopf algebras for physics at the Planck scale. Class. Quantum Grav. 5, 1587–1607 (1988)
Majid, S., Ruegg, H.: Bicrossproduct structure of the k-Poincare group and non-commutative geometry. Phys. Lett. B 334, 348–354 (1994)
Majid, S.: Noncommutative Riemannian and spin geometry of the standard q-sphere. Commun. Math. Phys. 256, 255–285 (2005)
Majid, S.: Quantum gravity on a square graph. Class. Quantum Grav. 36(23), 245009 (2019)
Mourad, J.: Linear connections in noncommutative geometry. Class. Quantum Grav. 12, 965–974 (1995)
Podleś, P.: Quantum spheres. Lett. Math. Phys. 14, 193–202 (1987)
Snyder, H.S.: Quantized space–time. Phys. Rev. 71, 38–41 (1947)
Stratonovich, R.L.: Sov. Phys. JETP 31, 1012 (1956)
Várilly, J., Gracia-Bondía, J.: The Moyal representation for spin. Ann. Phys. 190, 107–148 (1989)
Woronowicz, S.: Differential calculus on compact matrix pseudogroups (quantum groups). Commun. Math. Phys. 122, 125–170 (1989)
Funding
No funds, grants or other support were received.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Beggs, E., Majid, S. Quantum geodesic flows and curvature. Lett Math Phys 113, 73 (2023). https://doi.org/10.1007/s11005-023-01687-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11005-023-01687-7
Keywords
- Noncommutative geometry
- Quantum gravity
- Ricci tensor
- Quantum mechanics
- Fuzzy sphere
- Quantum group
- Quantum sphere