
Abstract
We describe the flexible multimethod seismic site characterization technique for obtaining shear-wave velocity (VS) profiles and derivative information, such as the time-averaged VS of the upper 30 m (VS30). Simply stated, the multimethod approach relies on the application of multiple independent noninvasive site characterization acquisition and analysis techniques utilized in a flexible field-based approach through a decision process based on primary factors such as the investigator’s available equipment, field logistics (e.g., available array deployment space, urban versus rural), geologic setting, and funding among other primary factors. In a multimethod approach, sites ideally should be characterized using both active and passive noninvasive (i.e., no drilling and only minimal disturbance to the ground surface) methods. Almost without exception, we recommend the use of at least one active-source technique for analyzing surface waves, which in the current state of practice would include one or more of the following: spectral analysis of surface waves (SASW; commonly Rayleigh waves) and multichannel analysis of surface waves (MASW; Rayleigh and/or Love waves). In addition, passive-source microtremor array methods (MAMs) using linear (one-dimensional) and two-dimensional arrays may be appropriate or even required for characterizing a given site. Similarly, the microtremor horizontal-to-vertical spectral ratio (mHVSR) method thacan be valuable for identifying shallow rock sites. Finally, P- and SH-wave seismic refraction methods warrant consideration, especially at rock and shallow-rock sites.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Seismic site conditions have substantial effects on observed ground shaking, and thus, site effects are a key consideration for the research and engineering communities when advancing the state-of-knowledge and -practice for mitigating earthquake hazards. Site effects can be influenced by wave propagation phenomena such as azimuthal energy dependence, seismic focusing, three-dimensional (3D) subsurface geologic structure, and scattering, which can be caused by the character of the seismic sources and variations in material properties along the paths traveled by seismic waves (e.g., Beresnev and Wen 1995; Olsen and Schuster 1995; Semblat et al. 2000; Stephenson et al. 2006; Kawase et al. 2018; Miyakoshi et al. 2019). However, shear (S)-wave motions are generally acknowledged to have the greatest influence on the character of seismic ground shaking and thus are expected to directly affect the built environment (Anderson et al. 1996; Kramer 1996; Towhata 2008); thus, shear-wave velocity (VS) seismic site characterization is needed to understand site response. Fundamentally, surface-based methods for VS profiles require single and/or multiple stations temporarily deployed along the surface at the site, thus avoiding the need for expensive borings and disturbance of the near-surface medium. The multimethod approach takes advantage of numerous site characterization techniques to give practitioners the opportunity to obtain a reliable estimate of VS through the largest possible range of site conditions.
1.1 Motivations for the flexible multimethod approach
Ideally, a comprehensive multimethod approach that combines all possible surface seismic techniques is expected to yield a more accurate, reliable, and precision-appropriate VS profile (for uncertainty in VS models, see Toro 2022, this issue). The key reason one might use a flexible multimethod approach is that no single VS site characterization method is guaranteed to work at every location. Additionally, a flexible approach acknowledges that not every practitioner will have the time, equipment, or funding to use a complete or large complement of methods at every site (nor will it always be necessary); thus, the multimethod approach to site characterization focuses on economy and practicality. Pre-deployment efforts are critical for determining a field acquisition procedure; a flexible multimethod approach can be catered to logistical limitations such as available array deployment space and permissions.
We describe a flexible site characterization approach based on application of multiple methods that takes advantage of a priori site knowledge to assess which of a suite of noninvasive (i.e., surface) array-based seismic site characterization methods are optimal for determining the site VS profile. Although our process relies on individual methods that have been applied as standalone approaches for more than 30 years (Nazarian and Stokoe 1984; Bard 1999; Park et al. 1999; Louie 2001; Okada 2003), our procedures consist of combinations of multiple established (and in some cases improved) methods that have only been used in a consistent approach by a select a group of researchers and commercial practitioners over the past several decades (Odum et al. 2013; Yong et al. 2013, henceforth as Y13; Salomone et al. 2013; Martin et al. 2014; 2017; Stephenson et al. 2015; GEOVision 2016, 2018; Yong et al. 2019, henceforth as Y19; Stephenson et al. 2021). In an ad hoc manner, each group of investigators independently began applying combinations of multiple surface-based seismic approaches for a variety of site conditions where types of shallow subsurface features are known to strongly control the behavior of seismic velocities. We combine lessons acquired from these recent investigations to provide guidance on applying our flexible multimethod approach to seismic site characterization of the shallow subsurface.
The main objective of a multimethod site characterization is to use readily available tools (both equipment and software) to cost-effectively acquire reliable field records that can be directly used to satisfy minimum requirements for modeling the site one-dimensional (1D) VS profile and derivative information such as the time-averaged VS to the depth of 30 m (VS30). Thus, our approach applies select components of standalone field acquisition and ad hoc analysis methods that are based on active- and/or passive-source surface-based approaches that are (as a whole) commonly used in practice (Y19).
In the following subsections, we provide background information about case studies to support detailed descriptions about our approach for a diverse range of environments that are associated with various seismic site conditions. Although characterizing VS seismic site characterization is the focus of our paper, our approach may be applicable to other sites of interest; however, adoption of the following procedures should be carefully considered.
1.2 Seismic site characterization techniques for flexible multimethod analysis
We present the application of multiple surface seismic site characterization methods as a reliable approach for obtaining VS profiles. Detailed descriptions of the methods we use can be found in other chapters of this special issue and previous publications. As we have implemented the multimethod technique, the approach includes active-source body-wave (P- and S-wave seismic refraction, as described in Telford et al. (1990); Hunter et al. (2022, this issue), among others) and active- and passive-source surface wave methods, as well as microtremor-based horizontal-to-vertical spectral ratio (mHVSR; Molnar et al. 2022, this issue). Active-source surface wave methods include spectral analysis of surface waves (SASW; Nazarian and Stokoe 1984) and multichannel analysis of surface waves (MASW; Park et al. 1999; Foti et al. 2014, 2018). Passive-source surface wave methods include refraction microtremor (ReMi; Louie 2001; Louie et al. 2021, this issue), and various two-dimensional (2D) microtremor array methods (MAMs), such as the spatial autocorrelation (SPAC; Aki 1957) technique and its variants such as the extended spatial autocorrelation (ESAC; Ohori et al. 2002) and wavenumber (k) normalized SPAC (krSPAC, Asten et al. 2019) analysis techniques. Additional MAMs include frequency-wavenumber (FK) methods such at beamforming (Lacoss et al. 1969), the maximum-likelihood method (Capon 1969; often referred to as higher resolution FK beamforming), the recently developed Rayleigh-wave three-component beamforming (RTBF) method (Wathelet et al. 2018), and noise cross-correlation or seismic noise interferometry techniques (e.g., Hayashi et al. 2022, this issue). Both MASW and SASW have been proven to be effective for active-source Rayleigh-wave (MASRW and SASRW) and Love-wave (MASLW and SASLW) dispersion analysis.
Our emphasis in this document is on the application of the multimethod approach for understanding site effects at seismograph stations in California and Central-Eastern United States (CEUS). We present examples of multimethod investigations from seismic station sites acquired for the 2009 American Recovery and Reinvestment Act (ARRA), funded by the U.S. Geological Survey for sites in California, and the CEUS. Additionally, we present results from the 2012 Electric Power Research Institute (EPRI) at sites in the CEUS as well as sites funded by the California Department of Conservation (DOC). The example sites are in rural to urban settings with topographic conditions ranging from relatively flat sedimentary basins to mountaintop ridges. Some of the presented ARRA, EPRI, and DOC sites are located on rock or have thin sediment cover over rock. Conversely, some of the example sites consist of thick sequences of Quaternary sediments overlying older sediments and rock.
In current practice, approaches to in situ seismic site characterization can be broadly categorized as either active- or passive-source. All in situ methods used here are noninvasive, whereby the field acquisition procedures only minimally disturb the ground surface at a site. Conversely, “invasive” methods include downhole well-shoot, suspension logging, and cross-hole methods, all of which require drilling. It should be noted that borehole methods may be the only appropriate approach for some rock conditions, where the exact depth locations of highly detailed changes in rock velocities are required, or where there is insufficient space for noninvasive testing; however, in general borehole methods are not considered as part of a multimethod approach.
Flexible data acquisition strategies including the combination of seismic refraction and active-source linear array data acquisition, use of multiple source types and source locations for MASW testing, as well as the combination of active- and passive-source surface-wave techniques may often be beneficial. Flexible data reduction and modeling strategies may also be useful in many cases, such as using limited offset ranges from small energy source MASW data to extend the bandwidth of the dispersion curve, using multiple data reduction techniques for analysis of MAM data (e.g., ESAC, FK, krSPAC, ReMi), and having multiple modeling tools available for data analysis (e.g., approaches to inversions using local and global searches (Gosselin et al. 2022, this issue), fundamental mode, effective-mode, multimode Rayleigh or Love wave, or joint Rayleigh and Love waves).
2 Multimethod data acquisition
In this section, we describe the critical steps needed for successful acquisition of multimethod site characterization data. We combine lessons acquired from numerous investigations to provide guidance on applying a flexible multimethod approach to seismic site characterization of the shallow subsurface.
2.1 Pre-deployment preparations
Prior to field acquisition, we recommend adoption of the pre-deployment procedures prescribed by Y13 as part of the ARRA project. Y13 required three main constraints on field crews that addressed concerns about scientific and engineering rigor, as well as issues relating to cost and environmental impact. These constraints include (1) prerequisites on location selection for the measurement arrays prior to each site visit, (2) metrics on distances between the recording array(s) and the targeted seismic station, and (3) assessment on types of applicable geophysical methods.
For the first constraint, we recommend performing the following prior to deployment for in situ site characterization recordings, a reconnaissance site visit (as feasible), remote assessments (e.g., using current aerial or satellite imagery, if possible), and literature searches for published geologic information and environment site conditions. Among key information gleaned from these exercises is the availability of space for both 1D- and 2D-array deployments at a site. When investigating urban environments, we also recommend careful site inspection to avoid underground utilities such as pipeline and conduits (whether active or inactive) whenever possible. For each location, Y13 mandated the creation of site maps that included markings showing the known location(s) of network seismic monitoring stations, a colored circular symbol to indicate an arbitrarily defined (150 m) radial distance from the station site, a second differently colored similar symbol indicating the maximum radial extent (300 m), and line symbol(s) describing the proposed location(s) of the recording array(s) to be deployed during the site investigation.
Second, Y13 encouraged measurement array locations to be within 150-m radial distance from the location of the station of interest to ensure that the best possible models of the velocity profile directly beneath each station can be attained. When impediments such roadways/vehicles, man-made structures, permission-related access issues, or other constraints (e.g., irregular or steep surface topography) existed within the 150-m radial area, prohibiting the effective deployment of the array(s), the field crew were instructed to follow the recommendation of Borcherdt (2002) and extend the radius to no more than 300 m from the seismograph station location. A necessary convergent condition for such an exception was that the surficial geologic materials surrounding the station should be verified as matching, or closely matching, the materials at the location of the proposed array. Note that subsequent research affirms the importance of proximity for the geophysical arrays to the station site (e.g., Stephenson et al. 2021).
Third, Y13 restricted field survey methods to noninvasive geophysical techniques, either in combination (i.e., multimethod) or as standalone. The scope of this review article focuses on our preferred flexible multimethod acquisition approach using a combination of noninvasive techniques.
2.2 Environmental conditions
Our example sites, presented in a later section, include diverse environments that are summarily categorized by urban, suburban, or rural settings, as well as by general geology such as soil or rock. Terms such as rural, suburban, or urban are used to account for site noise conditions, and terms such as soil or rock to estimate geologic conditions by Y13. Urban and suburban sites can be expected to have sufficient noise (ambient seismic energy) to apply passive surface-wave methods, whereas the same noisy conditions may impede analyses of active-source recordings due to the prevalence of high-frequency noise that is often observed to mask the onset of critical signals (e.g., Hunter et al. 2022, this issue). Conversely, we have observed that rural sites can have insufficient high frequency noise energy (commonly anthropogenic and above 2 Hz) for shallow investigation with passive methods, and therefore active-source methods may be the only option. Passive surface-wave methods may, however, be effective at characterizing deep velocity structure in rural environments. Suburban sites may represent intermediate noise conditions compared to that of urban and rural settings; it is in these transitional environments that the assumption of ambient (isotropic) noise conditions may not be applicable given higher energy from several anisotropic sources that can dominate the environment in space or time, prompting a recent study by Asten et al. (2022, this issue) and others to issue caution when applying passive methods (Hayashi et al. 2022; Louie et al. 2021; Pancha and Apperley 2021; all in this issue).
2.3 Seismic survey design: array and seismic source selection
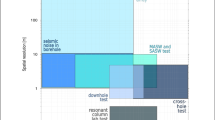
The array design(s) at a given site are dictated by the available space and the depth of investigation needed to adequately characterize the site. In general, for an active-source site investigation focusing on the upper 30 m, one might need 100 + m of aperture on a linear array. For active source, this is the distance from the source location to the farthest sensor commonly using 24 to 96 sensors in the array. The acquisition sample rate for active-source data needs to be 2 ms or less to capture the frequencies required for body-wave analysis. For passive-source linear arrays, 24 to 96 sensors is common, whereas for 2D arrays the number of sensors typically varies from 3 to 48; a 2 to 10 ms sample rate for passive data is usually adequate. In general, sensors whose natural frequency is 2 to 4.5 Hz are recommended for investigation of velocity structure in the upper 100 m, whereas lower frequency sensors are likely necessary for deeper investigation. The depth of investigation for 2D passive surface-wave arrays is expected to be equal to 1 and 0.5 times the maximum array aperture when using SPAC and beamforming analysis techniques, respectively (Foti et al. 2018).
The accompanying papers in this special issue provide specific directions for each of the individual methods. For example, if using mHVSR refer to Molnar et al. (2022); if using SH-body-wave data, see Hunter et al. (2022); if using ReMi, see Louie et al. (2021); guidelines on MAM can be found in Hayashi et al. (2022). While not explicitly included in this special issue, guidelines for MASW and SASW can be found in Y13, Dal Moro (2014), Martin et al. (2017), and references therein.
By the nature of the multimethod strategy, the equipment required for acquisition can be quite diverse; however, for active source acquisition, the practitioner needs to determine the maximum depth of investigation, and to assess the noise level to be overcome with an energetic source. We recommend having numerous hammer sources available in multiple weights (from ~ 1 to ~ 9 kg) for a given investigation. For greater depths, sources such as P- and S-wave vibroseis or accelerated weight drops (AWDs) may be more appropriate, although cost might be a prohibiting factor. A 40- to 90-kg AWD may be required to characterize velocity structure to 30-m depth at some sedimentary sites, whereas a sledgehammer source is commonly sufficient at shallow rock sites. Examples of active sources for varying scales of VS site characterization are shown in Fig. 1.

Typical source options for active source seismic site characterization. a Hand-held hammers for shallow surveys often range from ~ 1 to 9 kg. b Examples of shear-wave sources. c Vertical impact accelerated weight drop strikes a metal strike plate on ground. A similar strike plate is needed for virtually all hammer sources, such as shown in a. d Accelerated weight drop configured for shear-wave energy. f For greater depth of investigation, practitioners might need to be creative in utilizing heavy equipment, such as an excavator for seismic energy. g Mini-vibroseis vehicle used in an urban setting. Photos a to f courtesy of Antony Martin, GEOVision; photo g courtesy of Jack Odum, U.S. Geological Survey
Acquisition of active-source linear array Rayleigh- or Love-wave dispersion data (i.e., MASW or SASW) will be dictated in part by the equipment the practitioner is using. MASW caters to practitioners with recording systems used for exploration-style seismic applications whereas SASW was designed for acquisition with spectral analyzers, more common in engineering applications. Both techniques rely on the collection of Rayleigh- and/or Love-wave dispersion data and accurate interpretation of the fundamental, higher, and effective modes. As a group, the authors of this article have their independent preferences of which method to use in each circumstance; however, we have strong consensus that at least one of these techniques will be beneficial as part of any flexible multimethod site characterization. Acquisition of Love-wave dispersion requires horizontal-component sensors, but if available we have found many cases where Love waves contribute important information to characterizing VS at some sites (examples presented in Section 3).
Acquiring HVSR at sites where bedrock is expected to be shallow or where little is known about the site conditions is beneficial. HVSR is a simple technique that can provide valuable constraint on the depth to large velocity contrasts (Molnar et al. 2022, this issue).
2.4 Seismic site conditions
Because modeling VS profiles to estimate the site VS30 was the aim of the investigations, pre-existing seismograph station locations were the exclusive sites of interest. It is, nevertheless, feasible to consider station sites as representative for sites of similar seismic subsurface conditions as they are typically situated in diverse surroundings that reflect almost every conceivable geologic environment: urban to rural settings underlain by flat sedimentary basins to rugged mountaintop ridges.
3 Multimethod data analysis
Proper identification of both body- and surface-wavefield events is paramount for VS site characterization. Practitioners need to be well-versed in identification of P- and SH-wave refraction and reflection arrivals; numerous textbooks and other reference material provide information on this critical step (e.g., Telford et al. 1990; Hunter et al. 2022, this issue). Similarly, identification of the mode and type of the surface-wave arrivals needs to be carefully conducted; adding to the complexity of surface wave analysis for wavefield events needed for site characterization, higher modes can be a dominant component of the surface wavefields in the higher frequency band in some shallow environments. Surface-wave phase identification is described in many texts and references (e.g., Telford et al. 1990; Socco and Strobbia 2004; Foti et al. 2014). As a newer concept in surface-wave analysis, “effective mode” identification has gained traction in the near-surface community because dispersions picked in conventional analyses can reflect spectral mode jumping, where a higher mode is dominant over the fundamental in some frequency bands due to the shallow velocity structure (e.g., Ikeda et al. 2012). Hayashi et al. (2022, this issue) provide additional examples of identifying mode jumping and the effective mode in microtremor array studies. Finally, practitioners should also be aware that resolution limitations of MAM techniques may also result in an average between two modes being recovered over a given frequency range.
An important component to a successful multimethod approach is to use readily available commercial and open-source software for analysis. Whenever possible, near real-time analysis is valuable for deciding what methods to use while on-site. Numerous packages are available for analyzing active- and passive-source linear array surface-wave dispersion and for dispersion modeling. As shown in Fig. 2, it is common for various dispersion datasets to cover only a limited range of frequency and thus limiting the resolution and depth of the interpretation. It is therefore advisable to simultaneously analyze the surface wave dispersion data from multiple acquisition methods, after careful selection of the dispersion picks, by combining the sets of picks from each method into a single dataset and ensuring overlap of the picks from the different methods; this analysis allows the practitioner to extend the overall usable frequency range of data (Y19). We refer to this edited observed dispersion dataset as the representative dispersion curve, which can be modeled for the VS profile using a practitioner’s preferred scheme. McPhillips et al. (2020) provide a useful tool for developing representative dispersion curves. Commercial and open-source analysis and modeling software packages are also readily available for analyzing P- and S-wave reflection and refraction data as well as mHVSR data. Many newer modeling packages allow simultaneous modeling of dispersion and mHVSR data. The current state of practice in multimethod data analysis relies on independent analysis of surface-wave and body-wave data to obtain a broadly consistent VS profile or suite of profiles.

Example of representative dispersion curve (d. c.) procedure as part of multimethod modeling for site characterization. a Dispersion picks from a MAM (green crosses), “deep” MASRW (larger aperture array designed for lower frequency dispersion; blue crosses), and “shallow” MASRW (smaller aperture array designed for higher frequency dispersion; gray crosses) datasets. b Representative dispersion curve incorporating three dispersion datasets in a. Left: representative dispersion in black dots over representative dispersion curves of individual methods. Right: representative dispersion with standard deviation shown by error bars
4 Multimethod site characterization examples
For this study, we adapt the soil and rock site definitions of Y13 but redefine soil sites as simple 1D subsurface sedimentary depositional environments where material stiffness (thus, VS) generally increases with depth and define rock sites as being Tertiary or older sediments, sedimentary or crystalline (igneous and metamorphic) rock at or within a few meters beneath the surface. Soil sites with expected high-velocity sedimentary or crystalline rock at depths less than the exploration depth of the surface-based methods utilized are defined here as soil-rock sites. Within this context, we define “shallow” as the region from the surface to tens of meters deep.
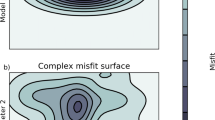
Although soil, soil-rock, and rock geologic conditions categorically capture the variability of seismic site conditions, variations in near-surface complexities can span: (1) simple 1D sedimentary structures, where seismic velocities (material rigidity) are generally consistent within each stratum and where the overall velocity gradient generally increases gradually with soil depth; (2) 1D sedimentary sites with velocity reversals in the soil column; (3) sites where sedimentary stratigraphy generally remains 1D but includes an abrupt transition from soil to shallow rock conditions (soil-rock); (4) sites where stratigraphy also remains 1D (as above) but includes several abrupt transitions iteratively from soil to rock to soil conditions, repeatedly (soil-rock); (5) 2D sites with fractured rocks at or very near the surface (rock); (6) 2D sedimentary pseudo stratigraphy (soil) or sediments over shallow rock (soil-rock), where lateral velocity varies substantially in both soil and soil-rock. In the following sections, we provide representative examples of many of these site conditions. Finally, we note that 3D effects can be prevalent at many sites but are not commonly addressed in the current state of practice.
4.1 Simple sedimentary structures and deeper (> 10 m) soil-rock conditions
As a matter of practice, shallow site characterizations atop deep sedimentary basins tend to be some of the easier to obtain reliable VS profiles due to relatively simple shallow geologic structure, leading to straightforward surface-wave propagation in the frequency range of interest.
4.1.1 Site CE.12092—rural sedimentary basin
This site is in a rural area with infrequent traffic on a road to the west (Fig. 3a). In this case, data were acquired using a MAM triangular array, and a linear array for MASW, ReMi, and ESAC analysis. MASW data were collected along a 70.5-m-long array and the linear microtremor array data were collected along a co-located 108-m-long array. These arrays were located perpendicular to a road with occasional traffic. MAM data were also acquired using a 10-channel nested triangular array with a 60-m outer interstation spacing. The linear-array microtremor data were reduced using both the ReMi and ESAC analysis techniques (Fig. 3b). The reasonable agreement between these techniques increases confidence in the results. The dispersion curves from the linear array also agree with those from the more robust triangular array. All passive surface wave data agree with the MASW dispersion data in the overlapping wavelength range (Fig. 3b). Figure 3c shows a suite of models that provide an equivalent fit to the dispersion data, with the preferred model shown in red. Finding an ensemble of models that equally fit the observed data is beneficial for evaluating uncertainty.

a Base map of site CE.10292 showing linear array (red) and MAM array (green) in relation to the station location. b Dispersion data picked from MASW, MAM, linear-array SPAC, and ReMi are all consistent. Predicted dispersion for preferred model shown in red. c Ensemble of models that fit observed dispersion data, with the preferred model in red. Figure modified from GEOVision (2016)
4.1.2 Site CE.24967—suburban sedimentary site with bedrock at ~ 60 m depth
This site is in a suburban area with Holocene alluvium at the surface (Fig. 4a). Here, we describe application of MASRW, mHVSR, and MAM techniques, where the microtremor data were acquired with an L-shaped array. The mHVSR curves reveal an amplification peak at approximately 2.2 Hz (Fig. 4b), which indicates an abrupt increase in VS with depth and, at this site, was expected to be associated with crystalline bedrock. The theoretical HVSR response was computed for the small ensemble of VS models assuming the microtremor wavefield is diffuse (e.g., Molnar et al. 2022, this issue) and consists of only Rayleigh waves.

a Base map of site CE.24967 showing linear MAM array legs 1 and 2 (red lines), MASRW (green line), and mHVSR sensor (yellow star) in relation to the station location. b mHVSR amplitude spectra (black solid line) with standard deviation (black dashed lines) and ensemble of theoretical mHVSR response computed from equivalent VS models (green curves). c Application of multimethod analysis leads to observed dispersion values from various MAM approaches that were used to develop the observed representative dispersion curve (black dots). Predicted curve from preferred VS model shown by red line. d Ensemble of equivalent models that fit observed dispersion data, with the preferred model shown in red. Figure modified from Y13
The MAM technique will generally be required to characterize VS structure at urban and suburban sites. Additionally, active source surface wave techniques would be useful to characterize near surface velocity structure even if cultural noise limits the depth of investigation. The mHVSR technique is a highly valuable addition at any site with unknown subsurface geological conditions (i.e., no a priori site information) and, most importantly, at sites where bedrock is expected at a depth where it may influence the dispersion curve. Active- and passive-source surface-wave data (MASRW and MAM, respectively) were combined for modeling. A small ensemble of VS models demonstrates the non-uniqueness associated with both depth to and VS of the bedrock unit. In this case, there is about 20% variation in both bedrock VS (from 500 to 2500 m/s, and depth (from 50 to 60 m depth; Fig. 4c).
4.1.3 Site CE.13921—suburban sedimentary basin
The dataset at site CE.13921 was acquired near a busy road (Fig. 5a). MAM measurements were made both along an L-shaped array, acquired with forty-eight 4.5-Hz sensors spaced at 6 m, and a nested triangular array (MAM array geometries described in Hayashi et al. 2022, this issue), acquired with ten 1.0-Hz sensors. The dispersion curves from these two 2D arrays (blue and red in Fig. 5b) are in good agreement in the 5- to 12-Hz range. MASRW data were also acquired at this site using a 70-m linear array with 4.5-Hz sensors spaced at 1.5 m. The dispersion picks from these data extend the analysis range to over 100 Hz. When compared to the dispersion picks along the linear segments of the L-shaped array (both by ReMi and ESAC analysis), however, each linear segment of this array resulted in dispersion curves that were both different from each other and different from the 2D passive arrays and MASRW data (Fig. 5c). In a case such as this when conducting linear MAM analysis, the data would ideally be processed using multiple techniques and compared to MASRW (or SASRW) data to validate the VS modeling. As shown in Fig. 5d, the uncertainty in the VS profile increases with depth as indicated by the equivalent VS models that match the observed dispersion equally well to 50-m depth.

a Base map of site CE.13921 showing MASRW array (red) and MAM arrays (triangular in green, L array in blue) in relation to the station location. b Dispersion data picked from the MASRW, L, and triangular MAM (ESAC) arrays. c Comparison of dispersion data from passive 1D (linear) array analyses to 2D L and triangular arrays and MASRW data. d Ensemble of models that fit observed dispersion data, with the preferred model shown in red. Figure modified from GEOVision (2016)
This site demonstrates the importance of the multimethod approach to avoid several pitfalls when using a single method. For example, as shown in Fig. 5b, analyzing dispersion of the 2D MAM methods alone severely restricts the frequency bandwidth available for VS modeling, thus limiting the resolution in the shallowest part of the model that relies on the frequency range above 12 Hz for reliable VS estimation. Conversely, if only the MASRW dispersion were available, VS modeling would be poorly constrained, particularly at depths greater than ~ 20 m. A second possible pitfall at this site is not identifying bias in observed dispersion from the 1D MAM arrays (Fig. 5c). The dispersion on both the east–west and south-north 1D arrays are biased low and high, respectively, compared to the 2D MAM and MASRW dispersion. The busy roadway likely dominated the microtremor noise field, leading to the biased dispersion observations.
4.1.4 Site CI.PHOB—rural sedimentary basin
We find that almost all rural, deep sediment sites can readily be characterized using active-source Rayleigh-wave techniques in the upper few hundred meters. As shown in the example for site CI.PHOB (Fig. 6), the MASRW and SASRW techniques can generally be used interchangeably at sites where VS gradually increases with depth. The MASRW technique may offer advantages for sites where VS structure is more complex, whereas the SASRW technique may be more practical at sites with limited array space. The dispersion picks from the MASRW and SASRW methods overlie each other, yielding a representative dispersion curve (Fig. 6a) that is predicted by a best-fit model (black VS model) and an ensemble of equivalent models, as shown as Fig. 6b.

a Comparison of MASRW and SASRW dispersion data at site CI.PHOB. Representative dispersion values shown by black circles along with calculated dispersion curve (red curve) for preferred model. b Ensemble of equivalent models that fit observed dispersion data, with the preferred model shown in red. Figure modified from Y13
4.1.5 Site CE.12331—suburban, basin
In this example, from site CE.12331 (Fig. 7a), an initial VS model was developed to an approximate 90 m depth from combined MASRW and MAM datasets then constrained at greater depth using mHVSR data. The dispersion picks from the MASRW and MAM data overlap reasonably well in the wavelength range from about 18 to 60 m (Fig. 7b). Assuming an empirical depth of investigation of about λmax/2, where λmax is the maximum recoverable wavelength (180 m) in the dispersion data (e.g., Asten and Hayashi 2018), the modeling of the dispersion data alone reaches roughly 90-m depth. From dispersion-only modeling, the representative dispersion curve is predicted well by the black model in Fig. 7c.

a Base map of site CE.12331 showing MASRW array (red), MAM L array (blue), and mHVSR sensor location (yellow star), in relation to the station location. b Dispersion data picked from MASRW and MAM arrays. Representative dispersion values shown by black circles and predicted dispersion for preferred model shown in red. c Dispersion-only modeling yields the VS model shown by black curve. Ensemble of models extended to greater depth from dispersion-only model as constrained by mHVSR modeling, shown by red and blue lines. d Observed mHVSR (black curve) compared to predicted spectra from the ensemble of models in (c), color-coded to match scheme of extended models. Figure modified from GEOVision (2016)
As observed in Fig. 7d, the mHVSR data reveal an amplification peak at approximately 1.1 Hz, which is a resonant frequency not predicted from the dispersion-only model (although the longer-wavelength dispersion observations may be somewhat affected by a deeper layer). Therefore, mHVSR modeling was utilized to explore possible depths to a rock interface using the dispersion-only model to about 70-m depth as the initial model, with a layer added at greater depth for the rock layer. Inclusion of a bedrock interface through this mHVSR modeling indicates a depth between 120 and 140 m, based on the four alternative likely models. The mHVSR modeling improved the accuracy of the VS model in the 60- to 90-m depth range. The resulting VS models with a rock interface only provide an approximate estimate of bedrock depth and do not accurately reflect bedrock VS, although each provides a reasonable match to the resonant frequency and amplification observed in the mHVSR.
4.2 Shallow bedrock and rock site conditions
4.2.1 Site PN.PPPCH—rural shallow rock
Site PN.PPPCH is an excellent example of a site where both MASRW and MASLW can be effective at VS characterization. The site is located on Quaternary alluvium underlain by Paleozoic shale and sandstone. MASRW and P-wave seismic refraction data were collected along a 70.5-m-long array. MASLW and SH-wave seismic refraction data were collected along a longer 141-m-long array to ensure the seismic refraction depth of investigation was at least 30 m. The site yielded both good-quality Rayleigh- and Love-wave dispersion data and both were used for characterizing VS. In the VS modeling, depth to bedrock was anchored at 10-m depth based on interpretation of SH-wave seismic refraction data. Rayleigh- and Love-wave datasets were modeled independently using a local search inversion routine and common layer contacts (Fig. 8a). The resulting VS models have minor differences, which are likely associated with experimental error and/or minor anisotropy. Only a 5% difference in VS30 exists between the two models (Fig. 8b).

a Comparison of MASRW and MASLW dispersion curves at site PN.PPPCH. Each is shown with representative dispersion values (black) and best-fit predicted dispersion curves (red). b Comparison of MASRW and MASLW VS models. c Using a global inversion search algorithm to conduct joint inversion modeling, a suite of models was calculated that simultaneously fit the Love- and Rayleigh-wave dispersion within standard deviation of the observations (on left). On the right, the ensemble of VS models that provide acceptable misfit with the Love- and Rayleigh-wave observations. MASLW dispersion model shown by black line for comparison
As an alternative modeling approach, joint inversion of the Rayleigh- and Love-wave dispersion data using a global algorithm can be conducted (Fig. 8c). The global inversion algorithm used here did not allow shear-wave anisotropy as a parameter; however, even with that constraint we obtained reasonable misfits for both datasets although permitting up to 5% anisotropy (vertical-versus-horizontal S-wave propagation) would likely improve fit. The global inversion results indicate substantialuncertainty associated with bedrock depth and VS. When compared to the MASLW model with the bedrock constrained to 10 m, we find the bedrock surface from joint inversion is about 20% deeper and the interpreter gets a greater sense of the uncertainty in bedrock VS.
4.2.2 Site CI.LJR—rural; thick surficial residual of weathered rock
This site was surficially mapped as a quartz monzonite; however, field observation of surficial material and 2D SH-wave seismic refraction tomography modeling (Fig. 9a) indicates a thick sequence of residual soil and heavily weathered rock. In addition to the SH refraction data, we acquired MASRW and MASLW data. When the data are transformed to the phase velocity-frequency (C-f) domain for dispersion picking, several observations are notable (Fig. 9b). MASLW data yielded a clear fundamental mode Love wave, which was ultimately used for VS modeling (Fig. 9c). The Rayleigh-wave C-f transform from a 30-m offset source location and 70.5-m-long receiver array yielded primarily higher mode Rayleigh-wave energy in the MASRW data, with only frequency band-limited evidence of the fundamental mode (Fig. 9b, right). In this instance, the higher-mode energy could have easily been modeled as fundamental mode energy by an inexperienced practitioner. The 1.5-m MASRW source offset yields the fundamental mode Rayleigh wave over a narrow frequency range (10–25 Hz), confirming that Rayleigh-wave propagation is complex at this site. The MASLW dispersion picks are converted to a representative dispersion curve (Fig. 9c) and modeled to create the VS model in Fig. 9d, which is compared to the 1D SH-wave VS model averaged from the 2D tomographic profile. Using the two VS models to predict theoretical Rayleigh-wave propagation, fundamental mode Rayleigh waves should have been recovered; therefore, we speculate that high damping of near surface sediments resulted in rapid attenuation of the fundamental mode Rayleigh-wave energy.

Multimethod acquisition at site CI.LJR. a 2D VS refraction tomography model showing lateral variability in subsurface VS. b Phase velocity-frequency (C-f) domain plots for MASLW (left) and MASRW (right) data. c Dispersion data picked from linear MASLW, with representative dispersion values and calculated dispersion curve from MASLW VS model. d MASLW VS model (black curve) compared to VS model derived by averaging the 2D refraction model (dashed red), shown in a. Figure modified from Y13
4.3 Velocity reversal in soil column
Velocity reversals within shallow VS profiles pose a challenging site characterization problem, which is an area of intensive ongoing research (Vantassel and Cox 2022; this issue).
4.3.1 Site CE.14284—urban deep sedimentary profile
Site CE.14284 has a thick layer of pavement and compacted fill that lies atop a sequence of lower VS soil at a harbor site (Fig. 10a). We acquired MASRW, SASRW, and MAM datasets. The man-made higher VS material causes a telltale “C” shape to the dispersion data in the phase velocity-wavelength domain, indicating a velocity reversal in the soil column (Fig. 10b). The shape of the “C” will be dictated by the thickness of the velocity reversal. In a case such as this, the practitioner may need to rely on effective mode surface-wave modeling, which we used to develop the model in Fig. 10c.

a Photo of site CE.14284 (courtesy of Antony Martin, GEOVision) showing linear array of sensors at 1.5-m spacing along pavement near shipyard docks. b Dispersion picks from two passive-source (MAM 1 and MAM 2) and three active-source surveys (MASRW 1, MASRW 2, and SASRW), the representative (average) dispersion curve, and the calculated dispersion curve from the best-fit model using effective mode analysis. c VS model with interpreted velocity reversal. d Example of effective mode modeling as demonstrated in the coherency-frequency domain. The observed SPAC values show an anomalous flat spot between roughly 1.5 and 3 Hz caused by interference from higher-mode propagation. By analyzing for effective mode propagation, the predicted effective mode curve matches the observed data over a broader frequency band. Figure modified from Asten et al. (2019)
The need for effective mode analysis can be seen in Fig. 10d (modified from Asten et al. 2019). In this example, Rayleigh-wave MAM data were converted to the SPAC coherency-frequency domain. The observed SPAC values (black curve) show an anomalous flat spot between approximately 1.5 and 3 Hz caused by interference from higher-mode propagation. The observed data could not be matched by either fundamental mode (R0, red curve) or first higher mode (R1, yellow curve) assuming 1D surface-wave propagation. However, by assuming effective mode propagation, the predicted effective mode curve (blue) matches the observed data over a broader frequency band, extending from 1.5 to almost 4 Hz.
4.4 Large lateral VS variation along acquisition array
Lateral velocity variation beneath the measurement array is one of biggest challenges and causes of uncertainty in characterizing rock and shallow rock sites. If there is even shallow dip (< 5°) in the velocity structure beneath the array, dispersion curves for forward and reverse shot locations may diverge at long wavelengths. Lateral velocity variability can result in substantial scatter of surface wave dispersion data; however, the resulting VS model and VS30 may still be representative of average site conditions. In worst-case scenarios, where VS30 beneath the array varies by greater than 25%, it may not be possible to recover a reasonable surface-wave dispersion dataset for modeling. In such cases, it may still be possible to characterize these sites using the S-wave seismic refraction technique. Both P- and S-wave seismic refraction models are useful for accurately quantifying the lateral velocity variability beneath the testing arrays, and it is not uncommon to observe over 25% variation in VS30 over relatively small distances in rock and shallow rock terrains. It is advisable to use longer arrays (perhaps up to about 150 m) in rock and shallow rock environments both to ensure a seismic refraction investigation is at least 30 m deep and to potentially identify a long enough segment of the array with relatively 1D velocity structure for surface-wave analysis.
4.4.1 Sites AZ.PFO and NC.BBGB—rural rock sites
At site AZ.PFO, we utilized MASLW, MASRW, and seismic refraction for our suite of site characterization techniques (Love wave observations presented in Fig. 11a). As previously noted, SH refraction may be the only viable successful choice at some rock sites. At these locations, we acquired data with source locations off the ends of and within the arrays to improve the lateral 2D imaging resolution of the method. The seismic refraction model reveals a 5° dip in the weathered rock layer (Fig. 11b), which causes both Rayleigh- and Love-wave dispersion curves from forward and reversed source locations to diverge at long wavelengths (Fig. 11c). Thus, the dip in subsurface stratigraphic layering is supported by dispersion and SH tomography data. In such cases, an alternate test location with simpler 1D velocity structure should be found, although modeling of the average dispersion curve may yield acceptable results.

a Base maps of sites AZ.PFO and NC.BBGB showing linear array (red line) locations. b SH-wave 2D VS tomography image showing dipping bedrock interface at site AZ.PFO. c Love-wave phase velocity-wavelength with dispersion picks acquired with northwest propagation versus southeast propagation at site AZ.PFO. d C-f plots of reversed source locations at site NC.BBGB. Figure modified from Y13 and Martin et al. (2017)
At site NC.BBGB, we also used MASLW, MASRW, and seismic refraction methods.
Analysis of the frequency-velocity images from near-offset forward and reverse source locations indicate variation in dispersion from opposite propagation directions of the MASRW data (Fig. 11d). The fundamental mode Rayleigh wave is recovered over the 5- to 16-Hz frequency range from the source location at −1.5 m but only recovered at the 6- to 7-Hz range from the reversed source location at 72 m.
From these “rock sites,” all MASRW and MASLW (or SASL,RW) data would ideally be acquired using source locations at both ends of the active-source array to assess for possible dip in soil and bedrock horizons. When logistically feasible, it is also optimal to acquire multiple source offsets and types away from the array to potentially extend dispersion data bandwidth and the depth of investigation. Multiple source types are also recommended to extend the bandwidth of the dispersion curve. Source locations are added for seismic refraction acquisition inside the array and can also be used for MASW to explore velocity variability beneath the array. Acquisition of Love-wave data in addition to Rayleigh-wave data is often beneficial at shallow rock sites. At a minimum, we suggest that practitioners be prepared to acquire SH refraction and MASLW data if field review of MASRW data indicates that Rayleigh-wave propagation is complex.
5 Related topics and future directions
5.1 Site parameters from VS profiles: VS30
Virtually all site characterization used in seismic hazard is attributed to some metric from VS profiles. VS30 is the most common metric derived from a 1D VS profile for estimating ground motion site effects (Nazarian and Stokoe 1984; Park et al. 1999; Foti 2000; Louie 2001; Hayashi et al. 2022; Martin et al. 2017; Y13; Y19). Although VS30 is an imperfect metric for characterizing a site, its common use as an index for site effect in international building codes (International Code Council [ICC] 2015) and ground motion models for seismic hazard analyses (Petersen et al. 2020) warrants discussion.
Y19 evaluated the inter- and intra-method variability of VS30 values derived from multiple combinations of surface wave methods (e.g., MASW, SASW, MAM) for 31 seismograph sites in California and presented results based on substantially more sites than have been reported (Boore and Asten 2008; Cornou et al. 2009; Garofalo et al. 2016a, b; Asten et al. 2019, 2022). They estimated VS30 values from independent surface-wave dispersion and compared the values estimated from the same (intra-method) and alternative methods (inter-method), as well as to VS30 values estimated from combinations of multiple methods. The representative (experimental) dispersion curves derived by Y13 were the basis for the “dinver” inversion- and forward-modeling routines (Wathelet et al. 2020). Y19 developed VS profiles and calculated the individual method-based VS30 values for each site. Their results showed the maximum percent difference was 19% and the maximum correlation of variation was 0.08; both measures were below or near previously reported thresholds for acceptable (expected) data quality (Louie 2001; Y13; Foti et al. 2014). Their corresponding median measures were 4% and 0.03, which reflected low variability in inter- and intra-method uncertainties. Using their baselines as de facto benchmarks, Y19 found that it was possible to over- or under-estimate VS30 from data derived from an individual method. The percent differences in VS30 estimates were small because of the preselection of sites with existing multiple methods applied these sites and thus, can be considered negligible. However, complex near-surface conditions do not exist in the Y19 study, and thus, they speculated that estimates of VS30 for complex near-surface site conditions may yield greater differences. Y19 also demonstrated that the small differences of VS30 from each method-based estimation of sites affected the U.S. National Earthquake Hazards Reduction Program VS30 Site Classes assignments and that intermediate Site Classes will have to be used to assign estimated VS30 values that coincided with values marking Site Class boundaries. The Y19 authors acknowledged uncertainties associated with invasive and noninvasive methods and by relying on proxy benchmarks (baselines), they could be further obscuring the underlying uncertainties. Y19 also found that it was not always necessary to apply the full suite of currently available surface-wave methods at every site, but they recommended complementary methods to generate composite representative dispersion data, as also recommended in this paper. Finally, Y19 found the reliability of the resultant VS30 estimate was consistently dependent on two key factors: the use of complementary methods that adequately record wavelengths to resolve subsurface details to below the 30-m depth and the quality of the goodness of fit of the theoretical dispersion to the experimental data for each method.
5.2 Using VR40 to estimate VS30
Although this report is focused on the description and application of a flexible multimethod site characterization approach, on occasion coarse, rapid acquisition and analysis can be paramount for site investigation, thus the concept of VR40 as discussed here. Brown et al. (2000) proposed VR \(\lambda .\) as a relationship between fundamental mode Rayleigh-wave phase velocity at a given wavelength (\(\lambda\)) and VS30. Their procedure permits simplified acquisition of surface-wave data for approximating VS30. Following Brown et al. (2000), Martin and Diehl (2004) explored VR40 for estimating VS30. Later, Albarello and Gargani (2010) proposed Ve40 (e is effective mode) to estimate VS30. More recently, Yong et al. (2017) validated the use of VR40 for VS30 estimation to a larger dataset from Y13. None of these investigations, however, advocate for circumventing using VS profiles for ground response analysis, which require VS profiles and other site-specific recording parameters.
Although VS profiles developed from noninvasive active or passive surface-wave methods (SWMs) have become popular, as described in previous sections, reliable profiles from SWMs can require considerable analysis time to develop. Yong et al. (2017) evaluated the reliability of directly using the fundamental-mode dispersion curve, which is typically derived from the VR \(\lambda\) spectrum processed from SWMs. They followed Brown et al. (2000) by comparing VS30 calculated from SWMs with VR40 values for 175 sites from the dataset of Y13; they found VR40-based VS30 values correlate well with those derived from SWMs (linear regression R2 = 0.99). Moreover, VR40 values can be readily derived using a single-source two-receiver spacing configuration, thus facilitating rapid data collection. Yong et al. (2017) also found it was beneficial to use VR40 values to rapidly prescreen the subsurface for lateral velocity variability and to supplement data where observations are insufficient. For microzonation purposes, we suggest that VR40 values could also be used to densify sparse distributions of profile-based VS30 point values. Nevertheless, direct reliance on VR40 as the standalone approach is not recommended because a complete dispersion curve is necessary to confirm that the VR40 parameter was indeed derived from the fundamental mode.
5.3 QS estimates
As with other related subjects addressed by papers in this special issue, we briefly introduce the topic of near surface attenuation, known as QS or the shear-wave quality factor, within the context of site characterization and site response analyses. Readers are referred to Parolai et al. (2022) for detailed discussion of this topic from a site characterization perspective.
A complete determination of site effects can be obtained only if the effect of near-surface attenuation is included appropriately in the site response analysis (Lai and Rix 1998; Parolai 2014). Indeed, the site attenuation (as understood) counteracts amplification effects that primarily are due to impedance contrasts within the soil column, unless for extreme non-linear behavior and liquefaction. A consensus on the physical basis for site attenuation or damping is currently under debate, although several methods estimate attenuation (Parolai et al. 2022). Despite the apparent correlation between the amplification and attenuation phenomena, the assessment of site attenuation and specifically that of QS has attracted less attention, probably due to difficulties in constraining damping effects with accuracy from seismic data. Several studies relied on borehole earthquake recordings, although other attempts were also successful (or more effective) when using active seismic sources generating body and surface waves (Parolai et al. 2022).
At varying scales, Albarello and Baliva (2009) tested two sites in Italy using surface array-based recordings, and Prieto et al. (2009) studied data from permanent seismic network monitoring stations in southern California; both investigations took advantage of an existing or recent regional scale study (respectively) and showed that it was possible to estimate the attenuation of surface waves and the QS 1D structure using seismic noise recordings. Albarello and Baliva (2009) estimated the average damping of the soil by seismic noise measurements. Parolai (2014) showed that it was possible to obtain reliable QS 1D profiles starting from seismic noise data collected by small aperture arrays. These results were later confirmed by considering a large number of test sites (Parolai et al. 2022). Recently, Haendel et al. (2019) estimated the Q in shallow geological layers by analyzing seismic noise recorded by a vertical array of seismometers mainly through the adaption of the method of Fukushima et al. (2016) to determine QS−1.
5.4 Site effects and site response
Numerous analytical methods have been developed to estimate site response (Kaklamanos et al. 2021). Some site-specific non-ergodic site response methods were based on spectral analyses (e.g., standard spectral ratio techniques) and do not require supplementary data beyond earthquake recordings. Other site-specific approaches require numerous measurements from in situ seismic recordings, which are generally known as the field data acquisition portion of site characterization. For example, 1D frequency domain linear or equivalent linear ground response analysis (GRA) are in common practice, whereas 2D or 3D and/or nonlinear considerations require greater complexity and thus are less commonly applied. Prior to the use of GRA in dynamic analyses, key geotechnical site parameters, mainly VS, must be included to perform 1D GRA. QS is a less common but important geotechnical factor, which requires strategic recording using seismic methods (Parolai et al. 2022). When accounting for ergodic (representative) site effects commonly used in ground motion models, site parameters such as VS30 and the site dominant frequency (fd) have become sought-after measurements. S-wave slowness, the inverse of the S-wave velocity, is a lesser-known measure that has been found useful for highlighting detailed layers of the near surface (Brown et al. 2002; Boore 2004; Boore and Asten 2008; Asten et al. 2022; Stephenson et al. 2021; Mital et al. 2021).
5.5 Future directions in seismic site characterization
In addition to future advances in implementation of site parameters such as the fundamental resonance frequency and QS, advances in both equipment and computer technology will likely make application of a flexible multimethod approach more important for reliable state-of-the-art VS site characterization. Future directions will undoubtedly include capturing 3D site effects, when possible, with large numbers of nodal-type three-component sensors as these become less expensive and readily available. In addition to 3D acquisition and analysis techniques, applications of robust efficient joint inverse modeling approaches are already evolving to improve the reliability of VS profiling (e.g., Stephenson et al. 2021). Similarly, full waveform inversion modeling may become much more prevalent; its application would require both surface and body-wave information, likely constrained by other parameters such as attenuation and site resonant frequency. As machine learning techniques mature, neural network/deep learning likely will gain prominence for regionalized site characterization.
6 Rules of thumb for flexible multimethod approach
At least one active-source multichannel 1D array Rayleigh-wave method (MASRW, SASRW), with a minimum of two sources off each end of the array, should almost always be considered. At deep sedimentary sites, often a single dispersion methodology may be all that is needed. With MASRW, acquiring additional field records within the array and at more distal offsets can be valuable to increase lateral resolution and depth of investigation. Multiple source types (commonly greater source mass at greater distance) and source locations for MASW testing are often beneficial in increasing depth of investigation and data resolution. The addition of an active-source linear array Love-wave method (MASLW, SASLW) is also important, particularly where bedrock is expected to be shallow (e.g., sites with shallow rock and sites with thin low-velocity, highly attenuating surface deposits). P- and SH-wave seismic refraction methods also warrant consideration at sites with expected shallow bedrock and quiet rural sites. These body-wave data are acquired de facto with MASRW and MASLW data, respectively, and thus require no additional field time. Rayleigh- and Love-wave SASW techniques may also be required at sites with limited array space.
At least one passive-source technique, such as mHVSR or MAM (2D array if space permits), would be important to consider. The mHVSR method can be useful for identifying shallow-rock sites and for evaluating the relative variability of the depth-to-rock interface beneath the seismic station and the testing array. Finally, it should be recognized that some sites may only be characterized using borehole velocity techniques such as PS suspension logging, downhole seismic, cross hole seismic, or seismic cone penetrometer because of insufficient space for surface seismic arrays.
Flexible data reduction and modeling strategies may also be useful, such as using limited offset ranges from small-energy source MASW data, to extend the bandwidth of the dispersion curve, using multiple data reduction techniques for analysis of array microtremor data (e.g., SPAC, HRFK, ReMi), and having multiple inversion tools available for data analysis (e.g., local and global search, fundamental mode Rayleigh or Love wave, multimode, joint Rayleigh- and Love-wave modeling).
The fundamental mode modeling assumption has been found to be a valid for many cases; however, multimode or effective-mode modeling may be required, particularly where there is a geotechnically stiff surface layer, near-surface high-velocity layers, or an abrupt increase in shallow rock VS. The practitioner should carefully examine their dispersion picks to ensure proper propagation mode selection. Deep sediment sites in non-rural settings are best characterized with both active and passive surface-wave methods. Rock and shallow sediment sites are generally more challenging to characterize than deep sediment sites. Y13 found that roughly 10% of rock sites in the ARRA project could not be characterized using surface-wave methods but were successfully characterized using body-wave (SH-wave) refraction methods. Seismic refraction models provide additional information on depth to rock and are useful for quantifying lateral velocity variability. Based on our experience in characterizing shallow rock sites, we propose a strategy to acquire MASRW, MASLW, and P- and SH-wave refraction data and analyze the best quality surface-wave dataset for characterization. Many such sites can be characterized using only MASLW, demonstrating the importance of having Love-wave techniques available, when possible.
The SASW method can be useful at sites with substantial lateral velocity variation, as only a 30-m maximum receiver spacing is required to evaluate velocity structure to 30-m depth. In such cases, longer MASW arrays can also be considered, with the goal of extracting surface-wave dispersion from a 1D segment of the array.
7 Summary
Not all sites can be characterized using a single standalone surface-based seismic method. We summarize case studies to demonstrate the importance of using multiple geophysical techniques capable of robustly and cost-effectively characterizing many challenging seismic site conditions. Our examples were selected from an extensive number of in situ seismic site characterizations, including over 500 seismic stations, spanning a wide variety of geologic conditions in the United States (Odum et al. 2013; Salomone et al. 2013; Martin et al. 2014; 2017; GEOVision 2016; 2018; Stephenson et al. 2015, 2021; Y13; Y19). In our experience, no single surface seismic technique can be relied upon to determine the VS profile for every site condition. Therefore, we encourage use of multiple independent techniques for conducting surface seismic site characterization. Flexible multimethod investigations demonstrate that, although the MASRW and SASRW often can be used, other methods such as SH-wave seismic refraction, MASLW, SASLW, mHVSR, and MAM, can be critical for successful characterization. In general, application of at least one active and one passive method at each site is advisable. Lateral velocity variability can make it difficult to develop a coherent and continuous fundamental-mode dispersion curve for modeling. We have found the fundamental-mode inversion of Love-wave data easier to interpret, and useful for characterizing sites that cannot be easily resolved using Rayleigh-wave techniques. To extend the depth of investigation from active-source recordings (minimum 30 m), the investigators have found that it was necessary to use MAM and mHVSR, especially in non-rural areas.
Data availability
The data presented in this review article from the U.S. Geological Survey-funded ARRA project can be found at: https://pubs.usgs.gov/of/2013/1102/data/.
Code availability
McPhillips, D.F., Yong, A.K., Martin, A., and Stephenson, W.J., 2020, Graphical Dispersion Plot Editor (DPE) for seismic-site characterization by using multiple surface-wave methods: U.S. Geological Survey Open-File Report 2020–1065, 8 p., https://doi.org/10.3133/ofr20201065.
References
Aki K (1957) Space and time spectra of stationary stochastic waves, with special reference to microtremors. Bull Earthq Res Inst 35:415–456
Albarello D, Baliva F (2009) In-situ estimates of material damping from environmental noise measurements. In: Mucciarelli M, Herak M, Cassidy J (eds) Increasing seismic safety by combining engineering technologies and seismological data. NATO Science for Peace and Security Series C: Environmental Security, Springer, Dordrecht. https://doi.org/10.1007/978-1-4020-9196-4_6
Albarello D, Gargani G (2010) Providing NEHRP soil classification from the direct interpretation of effective Rayleigh-wave dispersion curves. Bull Seismol Soc Am 100(6):3284–3294. https://doi.org/10.1785/0120100052
Anderson JG, Lee Y, Zeng Y, Day S (1996) Control of strong motion by the upper 30 meters. Bull Seismol Soc Am 86(6):1749–1759. https://doi.org/10.1785/BSSA0860061749
Asten MW, Hayashi K (2018) Application of the spatial auto-correlation method for shear-wave velocity studies using ambient noise. Surv Geophys 39:633–659. https://doi.org/10.1007/s10712-018-9474-2
Asten MW, Stephenson WJ, Hartzell S (2019) Spatially averaged coherencies (krSPAC) and Rayleigh effective-mode modeling of microtremor data from asymmetric arrays. Geophysics 84(3):EN47–EN56
Asten MW, Yong A, Foti S, Hayashi K, Martin AJ, Stephenson WJ, Cassidy JF, Coleman J, Nigbor R, Castellaro S, Chimoto K, Cornou C, Cho I, Hayashida T, Hobiger M, Kuo C-H, Macau A, Mercerat ED, Molnar S, Pananont P, Pilz M, Poovarodom N, Sáez E, Wathelet M, Yamanaka H, Yokoi T, Zhao D (2022) An assessment of uncertainties in Vs profiles obtained from microtremor observations in the phased 2018 COSMOS Blind Trials. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10059-4
Bard P-Y (1999) Microtremor measurements: a tool for site effect estimation? In: Irikura K (ed) The effects of surface geology on seismic motion: recent progress and new horizon on ESG study, vol 3. Balkema, A.A, pp 1251–1279
Beresnev IA, Wen K-L (1995) P-wave amplification by near-surface deposits at different excitation levels. Bull Seismol Soc Am 85(5):1490–1494. https://doi.org/10.1785/BSSA0850051490
Boore DM (2004) Estimating VS30 (or NEHRP site classes) from shallow velocity models (depths < 30 m). Bull Seismol Soc Am 94(2):591–597. https://doi.org/10.1785/0120030105
Boore DM, Asten MW (2008) Comparisons of shear-wave slowness in the Santa Clara Valley, California, using blind interpretations of data from invasive and noninvasive methods. Bull Seismol Soc Am 98(4):1983–2003. https://doi.org/10.1785/0120070277
Borcherdt RD (2002) Empirical evidence for site coefficients in building code provisions. Earthq Spectra 18(2):189–217. https://doi.org/10.1193/1.1486243
Brown LT, Boore DM, Stokoe KH (2002) Comparison of shear-wave slowness profiles at 10 strong-motion sites from noninvasive SASW measurements and measurements made in boreholes. Bull Seismol Soc Am 92(8):3116–3133. https://doi.org/10.1785/0120020030
Brown LT, Diehl JG, Nigbor RL (2000) A simplified method to measure average shear-wave velocity in the top 30 m (VS30). Proceedings of the 6th International Conference on Seismic Zonation, 12–15 November, Palm Springs, California, pp 1–6
Capon J (1969) High-resolution frequency-wavenumber spectrum analysis. Proc Ins Electrical Electronics Eng 57(8):1408–1418. https://doi.org/10.1109/PROC.1969.7278
Cornou C, Ohrnberger M, Boore DM, Kudo K, Bard P-Y (2009) Derivation of structural models from ambient vibration array recordings: results from an international blind test. Proceedings of the 3rd International Symposium on the Effects of Surface Geology on Seismic Motion 2:1127–1219, 30 August–1 September, Grenoble, France
Dal Moro G (2014) Surface wave analysis for near surface applications. Elsevier Amsterdam. https://doi.org/10.1016/C2013-0-18480-2
Foti S (2000) Multistation methods for geotechnical characterization using surface waves. Politecnico di Torino, Italy, Ph.D. Thesis
Foti S, Lai CG, Rix GJ, Strobbia C (2014) Surface wave methods for near-surface site characterization. CRC Press, Boca Raton, Florida
Foti S, Hollender F, Garofalo F, Albarello D, Asten M, Bard P-Y, Comina C, Cornou C, Cox B, Di Giulio G, Forbriger T, Hayashi K, Lunedei E, Martin A, Mercerat D, Ohrnberger M, Poggi V, Renalier F, Sicilia D, Socco V (2018) Guidelines for the good practice of surface wave analysis: a product of the InterPACIFIC project. Bull Earthq Eng 16:2367–2420. https://doi.org/10.1007/s10518-017-0206-7
Fukushima R, Nakahara H, Nishimura T (2016) Estimating S-wave attenuation in sediments by deconvolution analysis of KiK-net borehole seismograms. Bull Seismol Soc Am 106(2):552–559. https://doi.org/10.1785/0120150059
Garofalo F, Foti S, Hollender F, Bard P-Y, Cornou C, Cox BR, Ohrnberger M, Sicilia D, Asten M, Di Giulio G, Forbriger T, Guillier B, Hayashi K, Martin A, Matsushima S, Mercerat D, Poggi V, Yamanaka H (2016a) InterPACIFIC project: comparison of invasive and non-invasive. Part 1: Intra-comparison of surface wave methods. Soil Dyn Earthq Eng 82:222–240. https://doi.org/10.1016/j.soildyn.2015.12.010
Garofalo F, Foti S, Hollender F, Bard P-Y, Cornou C, Cox BR, Dechamp A, Ohrnberger M, Perron V, Sicilia D, Teague D, Vergniault C (2016b) InterPACIFIC project: comparison of invasive and non-invasive. Part 2: Inter-comparison between surface wave and borehole methods. Soil Dyn Earthq Eng 82:241–254. https://doi.org/10.1016/j.soildyn.2015.12.009
GEOVision (2016) Surface wave measurements, California Strong Motion Instrumentation Program stations, Riverside County, California, GEOVision Report 16192–01 Rev 2, available at: https://www.conservation.ca.gov/cgs/smip/reports/surfacewave (last accessed December, 2021).
GEOVision (2018) Surface wave measurements, California Strong Motion Instrumentation Program stations, Santa Clara, Santa Cruz, San Benito and Monterey Counties, California, GEOVision Report 18045–01, available at: https://www.conservation.ca.gov/cgs/smip/reports/surfacewave. Last accessed December, 2021
Gosselin J, Dosso SE, Askan A, Wathelet M, Savvaidis A, Cassidy JF (2022) A review of inverse methods in seismic site characterization. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10047-8
Haendel A, Ohrnberger M, Krüger F (2019) Frequency-dependent quality factors from the deconvolution of ambient noise recordings in a borehole in West Bohemia/Vogtland. Geophys J Int 216(1):251–260. https://doi.org/10.1093/gji/ggy422
Hayashi K, Asten M, Stephenson WJ, Cornou C, Hobiger M, Pilz M, Yamanaka H (2022) Microtremor array method using spatial autocorrelation analysis of Rayleigh-wave data. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10051-y
Hunter JA, Crow HL, Stephenson WJ, Pugin AJ-M, Williams RA, Harris JB, Odum JK, Woolery EW (2022) Seismic site characterization with shear wave (SH) reflection and refraction methods. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10042-z
Ikeda T, Matsuoka T, Tsuji T, Hayashi K (2012) Multimode inversion with amplitude response of surface waves in the spatial autocorrelation method. Geophys J Int 190(1):541–552. https://doi.org/10.1111/j.1365-246X.2012.05496.x
International Code Council (2015) 2015 International Building Code. International Code Council Governmental Affairs Office, available at https://codes.iccsafe.org/content/IBC2015. Last accessed December 2021
Kaklamanos J, Cabas A, Parolai S, Guéguen P (2021) Introduction to the special section on advances in site response estimation. Bull Seismol Soc Am 111(4):1665–1676. https://doi.org/10.1785/0120210152
Kawase H, Mori Y, Nagashima F (2018) Difference of horizontal-to-vertical spectral ratios of observed earthquakes and microtremors and its application to S-wave velocity inversion based on the diffuse field concept. Earth Planets Space 70:1. https://doi.org/10.1186/s40623-017-0766-4
Kramer SL (1996) Geotechnical Earthquake Engineering. Prentice-Hall International Series in Civil Engineering and Engineering Mechanics, Prentice Hall, Upper Saddle River, New Jersey
Lacoss R, Kelly E, Toksöz M (1969) Estimation of seismic noise structure using arrays. Geophysics 34(1):21–38. https://doi.org/10.1190/1.1439995
Lai CG, Rix GJ (1998) Simultaneous inversion of Rayleigh phase velocity and attenuation for near-surface site characterization, Technical Report of the Georgia Institute of Technology, available at https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.37.587&rep=rep1&type=pdf. Last accessed on 5 March 2021.
Louie J (2001) Faster, better: shear-wave velocity to 100 meters depth from refraction microtremor arrays. Bull Seismol Soc Am 91(2):347–364. https://doi.org/10.1785/0120000098
Louie J, Pancha A, Kissane B (2021) Guidelines and pitfalls of refraction microtremor surveys. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10020-5
Martin AJ, Diehl JG (2004) Practical experience using a simplified procedure to measure average shear-wave velocity to a depth of 30 meters (Vs30). Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, B.C., Canada, August 1–6, 2004, Paper Number 952
Martin AJ, Yong A, Salomone LA (2014) Advantages of active Love wave techniques in geophysical characterizations of seismographic stations—case studies in California and the Central Eastern United States. Proceedings 10th U.S. National Conference on Earthquake Engineering, 21–25 July, Anchorage, Alaska
Martin AJ, Yong A, Stephenson WJ, Boatwright J (2017) Geophysical characterization of seismic stations in the United States—the importance of a flexible multi-method approach. Proceedings of 16th World Conference on Earthquake Engineering, 9–13 January, Santiago, Chile
McPhillips, D, Yong, AK, Martin A, Stephenson WJ (2020) Graphical Dispersion Plot Editor (DPE) for seismic-site characterization by using multiple surface-wave methods. U.S. Geological Survey Open-File Report 2020–1065, 8 https://doi.org/10.3133/ofr20201065.
Mital U, Ahdi S, Herrick J, Iwahashi J, Savvaidis A, Yong A (2021) A probabilistic framework to model distributions of VS30. Bull Seismol Soc Am 111(4):1677–1692. https://doi.org/10.1785/0120200281
Miyakoshi H, Tsuno S, Chimoto K, Yamanaka H (2019) Investigation of site amplification factors for S- and P-waves from spectral inversions in the Tokyo metropolitan area, Japan—for application to earthquake early warnings. J Seismolog 23:561–578. https://doi.org/10.1007/s10950-019-09823-4
Molnar S, Sirohey A, Bard P-Y, Castellaro S, Cornou C, Cox B, Guillier B, Hassani B, Kawase H, Matsushima S, Sánchez-Sesma FJ, Yong A (2022) A review of the microtremor horizontal-to-vertical spectral ratio (MHVSR) method. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10062-9
Nazarian S, Stokoe KH (1984) In situ shear wave velocities from spectral analysis of surface waves. In: Proceedings of the 8th World Conference on Earthquake Engineering, 3, 31–38, Prentice-Hall, San Francisco, California
Odum JK, Stephenson WJ, Williams RA, von Hillebrandt-Andrade C (2013) Vs30 and spectral response from collocated shallow, active and passive-source Vs data at 27 sites in Puerto Rico. Bull Seismol Soc Am 103(5):2709–2728. https://doi.org/10.1785/0120120349
Ohori M, Nobata A, Wakamatsu K (2002) A comparison of ESAC and FK methods of estimating phase velocity using arbitrarily shaped microtremor arrays. Bull Seismol Soc Am 92(6):2323–2332. https://doi.org/10.1785/0119980109
Okada H (2003) The microtremor survey method. Society of Exploration Geophysicists Monograph Series, No. 12, Tulsa, Oklahoma. https://doi.org/10.1190/1.9781560801740.fm.
Olsen KB, Schuster GT (1995) Causes of low-frequency ground motion amplification in the Salt Lake Basin: the case of the vertically incident P wave. Geophys J Int 122(3):1045–1061. https://doi.org/10.1111/j.1365-246X.1995.tb06854.x
Pancha A, Apperley RA (2021) Multidisciplinary site investigations: refraction microtremor surveys. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10019-y
Park CB, Miller RD, Xia J (1999) Multichannel analysis of surface waves. Geophysics 64(3):800–808. https://doi.org/10.1190/1.1444590
Parolai S (2014) Shear wave quality factor QS profiling using seismic noise data from microarrays. J Seismolog 18(3):695–704. https://doi.org/10.1007/s10950-014-9440-5
Parolai S, Dreossi I, Lai CG, Ktenidou O-J, Yong A (2022) A review of near-surface Q estimation methods using active and passive sources. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10066-5
Petersen MD, Shumway AM, Powers PM, Mueller CS, Moschetti MP, Frankel AD, Rezaeian S, McNamara DE, Luco N, Boyd OS, Rukstales KS, Jaiswal KS, Thompson EM, Hoover SM, Clayton BS, Field EH, Zeng Y (2020) The 2018 update of the US National Seismic Hazard Model: overview of model and implications. Earthq Spectra 36(1):5–41. https://doi.org/10.1177/8755293019878199
Prieto GA, Lawrence JF, Beroza GC (2009) Anelastic earth structure from the coherency of the ambient seismic field. J Geophys Res 114:B07303. https://doi.org/10.1029/2008JB006067
Salomone LA, Hamel JF, Kassawara RP (2013) EPRI (2004, 2006) ground-motion model (GMM) review project: shear wave velocity measurements at seismic recording stations. Electric Power Research Institute Technical Report 3002000719, 524 pp, available at https://www.epri.com/research/products/3002000719. Last accessed December, 2021
Semblat J-F, Duval A-M, Dangla P (2000) Numerical analysis of seismic wave amplification in Nice (France) and comparisons with experiments. Soil Dyn Earthq Eng 19(5):347–362. https://doi.org/10.1016/S0267-7261(00)00016-6
Socco LV, Strobbia C (2004) Surface-wave method for near-surface characterization: a tutorial. Near Surface Geophysics 2(4):165–185. https://doi.org/10.3997/1873-0604.2004015
Stephenson WJ, Frankel AD, Odum JK, Williams RA, Pratt TL (2006) Toward resolving an earthquake ground motion mystery in west Seattle, Washington State: shallow seismic focusing may cause anomalous chimney damage. Geophys Res Lett 33(6):L06316. https://doi.org/10.1029/2005GL025037
Stephenson WJ, Odum JK, Hartzell S, Leeds A, Williams RA (2021) Shear wave velocity site characterization in Oklahoma from active-source surface seismic measurements: implications for central U.S. ground motion prediction. Bull Seismol Soc Am 111(4):1693–1712
Stephenson WJ, Odum JK, McNamara DE, Williams RA, Angster SJ (2015) Ground motion site effects from multi-method shear-wave velocity characterization at 16 seismograph stations deployed for aftershocks of the August 2011 Mineral, Virginia, earthquake. In: Horton JW, Chapman MC, Green RA (eds), Geological Society of America Special Paper 509: The 2011 Mineral, Virginia, Earthquake, and Its Significance for Seismic Hazards in Eastern North America, 47–65. https://doi.org/10.1130/2015.2509(03)
Telford WM, Geldart LP, Sherriff RE (1990) Applied geophysics. Cambridge University Press, New York
Toro G (2022) Uncertainty in shear-wave velocity profiles. J Seismol This Special Issue. https://doi.org/10.1007/s10950-022-10084-x
Towhata I (2008) Geotechnical Earthquake Engineering. Springer-Verlag, Berlin
Vantassel JP, Cox BR (2022) SWprocess: a workflow for developing robust estimates of surface wave dispersion uncertainty. J Seismol This Special Issue. https://doi.org/10.1007/s10950-021-10035-y
Wathelet M, Guillier B, Roux P, Cornou C, Ohrnberger M (2018) Rayleigh wave three-component beamforming: signed ellipticity assessment from high-resolution frequency-wavenumber processing of ambient vibration arrays. Geophys J Int 215(1):507–523. https://doi.org/10.1093/gji/ggy286
Wathelet M, Chatelain J-L, Cornou C, Giulio GD, Guillier B, Ohrnberger M, Savvaidis A (2020) Geopsy: a user-friendly open-source tool set for ambient vibration processing. Seismol Res Lett 91(3):1878–1889. https://doi.org/10.1785/0220190360
Yong A, Martin A, Albarello D (2017) Rayleigh-wave phase velocity (VR40) based VS30 estimates. Seismol Res Lett 88(2B):581–582. https://doi.org/10.1785/0220170035
Yong A, Boatwright J, Martin A (2019) Precision of VS30 values derived from noninvasive surface wave methods at 31 sites in California. Soil Dyn Earthq Eng 127:105802. https://doi.org/10.1016/j.soildyn.2019.105802
Yong A, Martin A, Stokoe K, and Diehl J (2013) ARRA-funded VS30 measurements using multi-technique approach at strong-motion stations in California and Central-Eastern United States, U.S. Geological Survey Open-File Report 2013–1102 59 https://doi.org/10.3133/ofr20131102
Acknowledgements
The authors thank the many students, interns, field technicians, and colleagues who assisted in the acquisition and preliminary analysis of the methodology presented herein. The Consortium of Organizations for Strong Motion Observation Systems (COSMOS) consisting of the U.S. Geological Survey, the Geological Survey of Canada, and a group of North American power companies (Southern California Edison and Pacific Gas and Electric) identified the need for this paper and companion papers in this issue. COSMOS provided funding for multiple workshops and encouraged the authors to participate in this project.
Funding
Funding for the preparation and publication of this manuscript was provided in part by U.S. Geological Survey.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no financial or proprietary interests in any material discussed in this article. The Consortium of Organizations for Strong Motion Observation Systems (COSMOS) consisting of the U.S. Geological Survey, the Geological Survey of Canada, and a group of North American power utility companies (Southern California Edison and Pacific Gas and Electric) identified the need for the development of these publications and provided funding and encouragement to facilitate the project. Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. Government, Canadian Government, or COSMOS.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Article highlights
1. A review of the state of practice in the application of the multimethod surface seismic site characterization method is summarized.
2. Recommendations for application of a multimethod site characterization approach based on a flexible decision process are provided.
3. Examples of site characterization using a multimethod approach are provided for a set of sites near seismograph stations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Stephenson, W.J., Yong, A. & Martin, A. Flexible multimethod approach for seismic site characterization. J Seismol 26, 687–711 (2022). https://doi.org/10.1007/s10950-022-10102-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10950-022-10102-y