
Abstract
Polarization modulator units (PMUs) represent a critical and powerful component in CMB polarization experiments to suppress the 1/f noise component and mitigate systematic uncertainties induced by detector gain drifts and beam asymmetries. The LiteBIRD mission (expected launch in the late 2020 s) will be equipped with 3 PMUs, one for each of the 3 telescopes, and aims at detecting the primordial gravitational waves with a sensitivity of \(\delta r<0.001\). Each PMU is based on a continuously rotating transmissive half-wave plate held by a superconducting magnetic bearing in the 5 K environment. To achieve and monitor the rotation a number of subsystems is needed: clamp and release system and motor coils for the rotation; optical encoder, capacitive, Hall and temperature sensors to monitor its dynamic stability. In this contribution, we present a preliminary thermal design of the harness configuration for the PMUs of the mid- and high- frequency telescopes. The design is based on both the stringent system constraint for the total thermal budget available for the PMUs (\(\lesssim\) 4 mW at 5 K) and on the requirements for different subsystem: coils currents (up to 10 mA), optical fibers for encoder readout, 25 MHz bias signal for temperature and levitation monitors.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The Lite (Light) satellite for the studies of B-mode polarization and Inflation from cosmic background Radiation Detection (LiteBIRD) mission [1,2,3] is the next generation space mission (expected launch in the late 2020 s) aiming to detect primordial gravitational waves at a level \(\delta\)r < 0.001 which would provide a unique probe of fundamental physics and of the origin of the Universe [4]. A critical and powerful component in CMB polarization experiments is the polarization modulator unit (PMU). The polarization modulation methodology based on half-wave plate (HWP) can be divided in two families: step- and-integrate HWPs (SPIDER [5], QUBIC [6,7,8]) and continuously-rotating HWPs (ABS [9], EBEX [10], ACT-pol [11], POLARBEAR-2 [12], LSPE/SWIPE [13,14,15]).
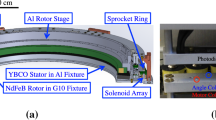
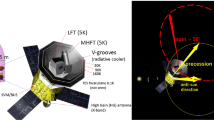
The LiteBIRD mission will be equipped with 3 PMUs [16, 17], one for each of the 3 telescopes (low-, mid- and high- frequency telescopes, LFT, MFT, HFT, respectively), used to suppress the 1/f noise component and mitigate systematic uncertainties induced by detector gain drifts and beam asymmetries. The mid- and high-frequency telescopes are developed by the European consortium: they are handled together because the cryogenic system and the thermal bus are shared. Both MFT and HFT PMUs are based on a continuously rotating transmissive HWP, levitating by means of a superconducting magnetic bearing (SMB) in the 5K environment [18, 19]. To achieve and monitor the rotation a number of subsystems are needed: launch locks to hold the PMU rotor during the launch; a clamp and release mechanism to keep in position the rotor and cool it down up to 5K; 64 motor coils to perform the rotation of the HWP; an optical encoder to read the position and the velocity during the rotation; capacitive, Hall and temperature sensors to monitor its dynamic stability.
As a result, a non-standard harness to connect the room-temperature control electronics to the cryogenic devices is needed. A careful harness optimization is mandatory for a space mission, both to minimize the conducted and dissipated power loads on the cryogenic stage while properly serving each subsystem.
We present a preliminary design of the harness configuration for the PMUs of the mid- and high- frequency telescopes: in Sect. 2.1 we describe the requirements and the choice made for motor wires, the ones with high current; in Sect. 2.2 we describe the position readout system; in Sect. 2.3 we describe the sensors used to monitor the dynamics and the temperature of the rotor.
2 Harness
The MFT and HFT HWPs (and also LFT-HWP) are the first optical elements of the two telescopes, operating at a nominal temperature of 5 K. A cryogenic mechanism takes care of the clamp, release, levitation and rotation with extremely low friction of the HWP. The polarization modulator unit controller (PMUC) electronics is located on the service module of the satellite, at a nominal temperature of 290 K. It is composed of different boards which share the same master clock of the other systems of the spacecraft. The PMUC exchanges data with the spacecraft bus system related to the dynamics and temperature of the rotor. Its block diagram is reported in Fig. 1.

Polarization modulator control electronics: each warm block represents a different board, while each cold block represents a different subsystem. The connections represent the harness (a 30 K stage is not represented and is used only for the harness thermalization)
The PMUs and the PMUCs are connected by a number of cables and optical fibers, which we will call simply the harness. The harness provides all the necessary electrical/optical connections between the room temperature PMUC and the sensors and actuators located in the cryogenic environment. All the electrical cables and optical fibers of the harness need to be optimized to minimize the heat load on the cryogenic section of the instrument. Between the 300 K and the 5K stages an intermediate thermalization stage is available at 30 K: 4 m and 2.5 m are the 300 K–30 K and 30 K-5 K routing lengths, respectively. The total heat load on each stage is composed of the conductive heat load and the Joule losses produced by the bias currents:
where Q is the heat flow, k(T) is the thermal conductivity of the material, A and L are the cross-sectional area and the length of the wire and \(T_1\) and \(T_2\) the temperatures at both ends of the conductor, while \(\rho (T)\) is its electrical resistivity and \(i_\mathrm{{avg}}\) the average flowing current. The cross-sectional area and the length of the wire can greatly affect the heat loss: too short of a wire will cause heating, too long of a wire will increase its resistance which may impact the circuit operation and increase the power dissipated in the wire itself. The minimization of the heat load is achieved providing proper heat sinking at the intermediate temperature stage, and selecting a conductor material with good electrical resistivity and limited thermal conductivity.
The total harness power loads expected on the 5 K stage and on the 30 K stage are \({490}~\mu \hbox {W}\) and 5.3 mW, respectively. This configuration gives a remaining cooling power available on the 5 K stage of \(\sim\)3.5 mW, which is compatible with contingency with the expected dissipated power from PMU operations [16]. Table 1 summarizes the configuration and the power load for each harness subsystem which will be described in the following subsections.
2.1 Motor
The motor harness is the most critical one since the motor coils are operated with an average current of few Ma [16]. The wire resistance should be minimized to reduce both the Joule heating and the voltage needed to produce the current. The motor harness controls:
-
8 sets of coils, requiring 8 different current phases to operate. The current in each of these wires runs for 25% (12.5% positive and 12.5% negative) of the time, and ranges from 300 mA at startup to less than 5–7 mA during operations. The resistance of the coils is very low at cryogenic temperature, so the resistance of the wires must be minimized to maximize the energy efficiency of the system. Each telescope has 8 (phases) times 2 (go and return) times 2 (redundancy) = 32 wires, i.e., 64 wires for the two telescopes.
-
the Clamp/Release and latch wires [21], which require a large current (\(\sim\) 0.7A) for a short time (0.1s) when actuated, and zero current for the rest of the time. Each telescope has 4 (go and return) times 2 (redundancy) = 8 wires, i.e., 16 wires for the two telescopes.
-
the launch locksFootnote 1 wires, which require large current (\(\sim\) 1.0A) for a short time when actuated, and zero current for the rest of the time. Each telescope has 2 (go and return) times 2 (redundancy) = 4 wires, i.e., 8 wires for the two telescopes.
We have selected Beryllium–Copper (CuBe) conductors for these wires, featuring low heat conductivity with reasonably high electrical conductivity. The best trade-off between heat dissipated in the wire and heat conduction towards the coldest stage consists in using the commercial AWG28 (0.321 mm diameter) wires.Footnote 2 Figure 2 shows a comparison of the total expected heat load versus conductor diameter produced by different materials (CuBe and manganin) for the two HFT and MFT telescopes (different average current). The estimated total load produced by CuBe wires for MFT and HFT on the 5 K stage is 370 μW and 1.75 mW on the 30 K stage.

Power load produced on the 5 K stages of MFT and HFT for manganin wires (dotted lines) and Beryllium–Copper wires (continuous lines). Black lines represent the total contribution in the two configurations
2.2 Optical Fibers
The position readout is obtained by means of two circles of slits on the periphery of the rotor. The passage of a slit at a reference angle position is sensed by the passage of a pulse of near IR radiation (normally blocked by the rotor disk) through the slit. Near IR radiation is carried and collected by two optical fibers (smaller heat load respect to wires and cryogenic sensors) for each slit circle, transferring radiation from and to the room temperature transmitters and receivers [16]. This configuration damps their dissipated power at room temperature, saving cooling power at 5K. Each PMU uses 4 optical fibers, plus 4 spares for the relative and absolute encoder readout. We have selected 50/125 multimode glass optical fibers, already used in cryogenic environments [22] and with estimated power load less than \({35}\mu \hbox {W}\) for both PMUs on the 5 K stage and of the order of \({200}\mu \hbox {W}\) on the 30 K stage.
2.3 Sensors
Each PMU has a set of sensors to monitor the status and performance during the rotation:
-
3 capacitive sensors [23] monitor the temperature and levitation height of the rotor [24] and 1 capacitive sensor mounted on the stator used as a reference. In case of nominal performance the capacitive sensors will be used occasionally to check the status of the rotation in order to avoid rotor discharge during continuous operation. Each sensor requires an input signal and produces an output signal (at \(\sim\) 25 MHz for capacitive coupling), both traveling through their coaxial cable., for a total of 6 coaxials for each PMU. We have selected semi-rigid cablesFootnote 3 with low thermal conductivity Brass center and CuNi outer conductors and a total attenuation of \(\lesssim\)10 dB. Each telescope has 1 input signal cable (4 capacitive sensors connected in parallel) times 2 (redundancy) and 4 output signal cables time 2 (redundancy), i.e., 20 coax cables for the two telescopes.
-
1 Hall sensorFootnote 4 for each PMU help in reading the position and monitor the wobbling, if accurately calibrated. Due to the high dissipation (\(\sim\)10 mA required on a resistance of 1.8\(\Omega\) implies 180 mW of Joule heating on the coldest stage which is not negligible compared with the total power budget), Hall sensors will be used only during the rotor release and occasionally to check the status. They can be also used as a redundancy for position and wobbling readout systems. Here we take into account only the heat load produced by the wires when the system is turned off. Each telescope has 1 Hall sensor times 4 wires (negative/positive supply current and differential signal) times 2 (redundancy) = 8 wires, i.e., 16 wires for the two telescopes. The material chosen is manganin to reduce as much as possible the conductive heat.
-
2 diode temperature sensors for each PMU will be used to monitor continuously the stator and the clamp temperatures. 2 temperature sensors times 4 wires times 2 (redundancy) = 16 wires, i.e., 32 wires for the two telescopes. Since the operating current is negligible (\(\lesssim\)10 \(\mu \hbox {A}\)), the material chosen is manganin, to reduce as much as possible the conductive heat.
-
4 spare wires per each telescope will be installed in case something goes wrong during the integration of the system and an additional sensor or component is needed. 4 wires times 2 (redundancy) = 8 wires, i. e., 16 spare wires for the two telescopes.
The total power load produced by the sensors on the 5 K stage is \({85}\mu \hbox {W}\): \({25}~\mu \hbox {W}\) from the coaxial cables and \({60}\mu \hbox {W}\) from AWG32 manganin wires (0.202 mm diameter). On the 30 K stage the power load is 3.4 mW: 1.5 mW and 2.1 mW from coaxial cables and manganin wires, respectively.
3 Conclusions
We presented the baseline thermal design of LiteBIRD PMUs harness for the mid and high frequency telescopes. Both PMUs have a polarization modulator control electronics located at a nominal temperature of 290 K and connected by the harness to the polarization modulator units located at 5 K. The harness is composed of CuBe for the motor wires, where the “high" current is flowing, optical fibers for position readout, CuBe coaxial cables for the capacitive sensors, and manganin wires for the other housekeeping sensors. With optimized selection of materials and cross sections, this configuration produces a total power load on the 5 K stage of \({490}~\mu \hbox {W}\) which is consistent with the stringent requirements of the LiteBIRD mission, giving a remaining cooling power available on the 5 K stage of \(\sim\)3.5 mW, which is compatible with contingency with the expected dissipated power from PMU operations.
Notes
According to Preece equation [20] (only radiative heat transfer considered), the DC fusing current of the AWG28 CuBe wires is \(\sim\)1A which is comparable to the current spikes needed for the clamps, latches and launch locks systems. On the other hand, the expected melting time is >200s which is orders of magnitude larger then the operating time required for these systems (\(\ll\)1s).
model GVLZ036 from http://www.gvl-cryoengineering.de/docs/coaxa10.pdf
References
Y. Sekimoto, LiteBIRD Collaboration. Proc. SPIE 10698, 106981Y (2018). https://doi.org/10.1117/12.2313432
M. Hazumi, and LiteBIRD Collaboration. Proc. SPIE 11443, 114432F (2020). https://doi.org/10.1117/12.2563050
LiteBIRD Collaboration, PTEP (2022), arXiv:2202.02773
M. Kamionkowski, E.D. Kovetz, Ann. Rev. A A 54, 227–269 (2016). https://doi.org/10.1146/annurev-astro-081915-023433
R. Gualtieri, J. Filippini et al., J. Low Temp. Phys. 193, 1112–1121 (2018). https://doi.org/10.1007/s10909-018-2078-x
J.C. Hamilton, L. Mousset et al., JCAP (2022). https://doi.org/10.1088/1475-7516/2022/04/034
G. D’Alessandro, L. Mele, F. Columbro et al., JCAP (2021). https://doi.org/10.1088/1475-7516/2022/04/039
A. Mennella et al., Universe (2019). https://doi.org/10.3390/universe5020042
A. Kusaka, T.L. Essinger-Hileman et al., Rev. Sci. Instrum. 85, 024501 (2014). https://doi.org/10.1063/1.4862058
The EBEX collaboration, Astrophys. J. Suppl. Ser. 239, 7 (2018). https://doi.org/10.3847/1538-4365/aae434.
S.W. Henderson et al., J. Low Temp. Phys. 184, 772–779 (2016). https://doi.org/10.1007/s10909-016-1575-z
C. Hill, A. Kusaka et al., Rev. Sci. Instrum. 91, 12 (2020). https://doi.org/10.1063/5.0029006
LSPE Collaboration, JCAP (2021). https://doi.org/10.1088/1475-7516/2021/08/008.
L. Lamagna, LSPE Collaboration, J. Low Temp. Phys. (2020). https://doi.org/10.1007/s10909-020-02454-x.
F. Columbro, P.G. Madonia, L. Lamagna et al., J. Low Temp. Phys. 199, 1–2 (2020). https://doi.org/10.1007/s10909-020-02396-4
F. Columbro, P. de Bernardis, L. Lamagna, S. Masi, A. Paiella, F. Piacentini, G. Pisano, Proc. SPIE 11443, 114436Z (2020). https://doi.org/10.1117/12.2577818
Y. Sakurai, T. Matsumura et al., Proc. of SPIE 11453, 114534E (2016). https://doi.org/10.1117/12.2560289
B.R. Johnson, F. Columbro, D. Araujo, M. Limon, B. Smiley, G. Jones, B. Reichborn-Kjennerud, A. Miller, S. Gupta, Rev. Sci. Instrum. 88, 105102 (2017). https://doi.org/10.1063/1.4990884
F. Columbro, Memorie della SAIT 92, 1 (2021)
V. Babrauskas, I.S. Wichman, Fire and Materials 2011, 12th International Conference and Exhibition, vol. 95222 (2011)
F. Columbro, P. de Bernardis, S. Masi, Rev. Sci. Instrum. 89, 125004 (2018). https://doi.org/10.1063/1.5035332
M. Salatino, P. de Bernardis, S. Masi, AA 528, A138 (2011). https://doi.org/10.1051/0004-6361/201015288
P. de Bernardis, F. Columbro, S. Masi, A. Paiella, G. Romeo, Rev. Sci. Instrum. 91, 4 (2020). https://doi.org/10.1063/5.0005498
F. Columbro, E.S. Battistelli, A. Coppolecchia, G. D’Alessandro, P. de Bernardis, L. Lamagna, S. Masi, L. Pagano, A. Paiella, F. Piacentini, G. Presta, Astron. Nachr. 340, 83 (2019). https://doi.org/10.1002/asna.201913566
Acknowledgements
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
Funding
Open access funding provided by Università degli Studi di Roma La Sapienza within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Columbro, F., de Bernardis, P. & Masi, S. Polarization Modulator Unit Harness Thermal Design for the Mid- and High-Frequency Telescopes of the LiteBIRD Space Mission. J Low Temp Phys 211, 407–414 (2023). https://doi.org/10.1007/s10909-022-02919-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10909-022-02919-1