
Abstract
The global bifurcation diagrams for two different one-parametric perturbations (\(+\lambda x\) and \(+\lambda x^2\)) of a dissipative scalar nonautonomous ordinary differential equation \(x'=f(t,x)\) are described assuming that 0 is a constant solution, that f is recurrent in t, and that its first derivative with respect to x is a strictly concave function. The use of the skewproduct formalism allows us to identify bifurcations with changes in the number of minimal sets and in the shape of the global attractor. In the case of perturbation \(+\lambda x\), a so-called generalized pitchfork bifurcation may arise, with the particularity of lack of an analogue in autonomous dynamics. This new bifurcation pattern is extensively investigated in this work.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The interest that the description of nonautonomous bifurcation patterns arouses in the scientific community has increased significantly in recent years, as evidenced by the works [1,2,3, 5, 11,12,13, 15, 17, 20, 21, 24, 25, 27, 29,30,32], and references therein. This paper constitutes an extension of the work initiated in [11], were we describe several possibilities for the global bifurcation diagrams of certain types of one-parametric variations of a coercive equation. We make use of the skewproduct formalism, which allows us to understand bifurcations as changes in the number of minimal sets and in the shape of the global attractor, which of course give rise to substantial changes in the global dynamics.
Let us briefly describe the skewproduct formalism. Standard boundedness and regularity conditions ensure that the hull \(\Omega \) of a continuous map \(f_0:{\mathbb {R}}\times {\mathbb {R}}\rightarrow {\mathbb {R}}\), defined as the closure of the set of time-shifts \(\{f_0{\cdot }t:\, t \in {\mathbb {R}}\}\) in a suitable topology of \(C({\mathbb {R}}\times {\mathbb {R}},{\mathbb {R}})\), is a compact metric space, and that the map \(\sigma :{\mathbb {R}}\times \Omega \rightarrow \Omega ,\;(t,\omega )\mapsto \omega {\cdot }t\) (where, as in the case of \(f_0\), \((\omega {\cdot }t)(s,x)=\omega (t+s,x)\)) defines a global continuous flow. The continuous function \(f(\omega ,x)=\omega (0,x)\) provides the family of equations
which includes \(x'=f_0(t,x)\): it corresponds to \(\omega =f_0\in \Omega \). When, in addition, \(f_0\) satisfies some properties of recurrence in time, the flow \((\Omega ,\sigma )\) is minimal, which means that \(\Omega \) is the hull of any of its elements. If \(u(t,\omega ,x)\) is the solution of (1.1)\(_\omega \) with \(u(0,\omega ,x)=x\), then \(\tau :\mathcal U\subseteq {\mathbb {R}}\times \Omega \times {\mathbb {R}}\rightarrow \Omega \times {\mathbb {R}}\), \((t,\omega ,x)\mapsto (\omega {\cdot }t,u(t,\omega ,x))\) defines a (possibly local) flow on \(\Omega \times {\mathbb {R}}\) of skewproduct type: it projects over the flow \((\Omega , \sigma )\). If \(f_0\) is coercive with respect to x uniformly in \(t\in {\mathbb {R}}\), so is f uniformly in \(\omega \in \Omega \), and this ensures the existence of the global attractor and of at least one minimal compact \(\tau \)-invariant subset of \(\Omega \times {\mathbb {R}}\). In the simplest nonautonomous cases, the minimal subsets are (hyperbolic or nonhyperbolic) graphs of continuous functions, and thus they play the role performed by the critical points of an autonomous equation; but there are cases in which both the shape of a minimal set and the dynamics on it are extremely complex, without autonomous analogues, and therefore impossible bifurcation scenarios for a autonomous equation can appear in the nonautonomous setting.
So, we take as starting points a (global) continuous minimal flow \((\Omega ,\sigma )\) and a continuous map \(f:\Omega \times \mathbb R\rightarrow {\mathbb {R}}\), assume that f is coercive in x uniformly on \(\Omega \), and define the dissipative flow \(\tau \). Throughout this paper, we also assume that the derivatives \(f_x\) and \(f_{xx}\) globally exist and are jointly continuous on \(\Omega \times \mathbb R\), as well as the fundamental property of strict concavity of \(f_x\) with respect to x: d-concavity. Not all these conditions are in force to obtain the results of [11], but, for simplicity, we also assume them all to summarize part of the properties there proved.
The first goal in [11] is to describe the possibilities for the \(\mu \)-bifurcation diagram of the one-parametric family \(x'=f(\omega {\cdot }t,x)+\mu \), with global attractor \(\mathcal A_\mu \). In particular, it is proved that, if there exist three minimal sets for a value \(\mu _0\in {\mathbb {R}}\) of the parameter, then: \({\mathcal {A}}_\mu \) contains three (hyperbolic) minimal sets if and only if \(\mu \) belongs to a nondegenerate interval \((\mu _-,\mu _+)\); the two upper (resp. lower) minimal sets collide on a residual invariant subset of \(\Omega \) when \(\mu \downarrow \mu _-\) (resp. \(\mu \uparrow \mu _+\)); and \({\mathcal {A}}_\mu \) reduces to the (hyperbolic) graph of a continuous map on \(\Omega \) if \(\mu \notin [\mu _-,\mu _+]\). That is, the bifurcation diagram presents at \(\mu _-\) and \(\mu _+\) two local saddle-node bifurcation points of minimal sets and two points of discontinuity of \({\mathcal {A}}_{\mu }\): is the nonautonomous analogue of the bifurcation diagram of \(x'=-x^3+x+\mu \).
A second type of perturbation is considered in [11], namely \(x'=f(\omega {\cdot }t,x)+\lambda x\), with global attractor \(\mathcal A_\lambda \), under the additional assumption \(f({\cdot },0)\equiv 0\). Now, \({\mathcal {M}}_0=\Omega \times \{0\}\) is a minimal set for all \(\lambda \), and its hyperbolicity properties are determined by the Sacker and Sell spectrum \([-\lambda _+,-\lambda _-]\) of the map \(\omega \mapsto f_x(\omega ,0)\). Two possible global bifurcation diagrams are described, and some conditions ensuring their occurrence are given. The first one is the classical pitchfork bifurcation diagram, with unique bifurcation point \(\lambda _+\): \({\mathcal {M}}_0\) is the unique minimal set for \(\lambda \le \lambda _+\), and two more (hyperbolic) minimal sets occur for \(\lambda >\lambda _+\), which collide with \({\mathcal {M}}_0\) as \(\lambda \downarrow \lambda _+\). An autonomous analogue is the diagram of \(x'=-x^3+\lambda x\). The second one is the local saddle-node and transcritical bifurcation diagram, with a local saddle node bifurcation of minimal sets at a point \(\lambda _0<\lambda _-\) and a so-called generalized transcritical bifurcation of minimal sets around \({\mathcal {M}}_0\). We will describe this diagram in detail in the next pages, pointing out now the most remarkable fact: \({\mathcal {M}}_0\) collides with another (hyperbolic) minimal set as \(\lambda \uparrow \lambda _-\) and as \(\lambda \downarrow \lambda _+\), and it is the unique minimal set lying on a band \(\Omega \times [-\rho ,\rho ]\) for a \(\rho >0\) if \(\lambda \in [\lambda _-,\lambda _+]\). This local transcritical bifurcation becomes classical if \(\lambda _-=\lambda _+\), being \(x'=-x^3+2x^2+\lambda x\) an autonomous example of this situation.
This analysis of the family \(x'=f(\omega {\cdot }t,x)+\lambda x\) initiated in [11] is now completed: the main goal in this paper is to describe all the possibilities for its bifurcation diagram. Besides the two described ones, only a third situation may arise: a generalized pitchfork bifurcation diagram, just possible when \(\lambda _-<\lambda _+\). It is characterized by the existence of two bifurcation points, \(\lambda _0\in [\lambda _-,\lambda _+)\) and \(\lambda _+\): \({\mathcal {M}}_0\) is the unique minimal set for \(\lambda <\lambda _0\), there are two of them for \(\lambda \in (\lambda _0,\lambda _+]\), and there are three for \(\lambda >\lambda _+\). The lack of an autonomous analogue raises a nontrivial question: does this bifurcation diagram correspond to some actual family? We also answer it, explaining how to construct nonautonomous patterns fitting at each one of the described possibilities. Furthermore, we prove that, given \(\lambda _-<\lambda _+\), any \(\lambda _0\le \lambda _+\) is the first bifurcation point of a suitable family \(x'=g_{\lambda _0}(\omega {\cdot }t,x)+\lambda x\) with Sacker and Sell spectrum of \((g_{\lambda _0})_x({\cdot },0)\) given by \([-\lambda _+,-\lambda _-]\), and that the three possible diagrams actually occur: they correspond to \(\lambda _0<\lambda _-\), \(\lambda _0=\lambda _+\) and \(\lambda _0\in [\lambda _-,\lambda _+)\). As a tool to prove of this last result, we analyze the bifurcation possibilities for a new one-parametric family, namely \(x'=f(\omega {\cdot }t,x)+\xi x^2\). In order not to lengthen this introduction too much, we omit here the (self-interesting) description of the bifurcation possibilities for this case, and refer the reader to Sect. 6.
These are the main results of this paper, which presents more detailed descriptions in some particular cases. Its contents are organized in five sections. Section 2 contains the basic notions and properties required to start with the analysis. Section 3 is devoted to the description of the three mentioned possibilities for the bifurcation diagrams of \(x'=f(\omega {\cdot }t,x)+\lambda x\). In Sect. 4, we focus on the case of a cubic polynomial \(f(\omega ,x)=-a_3(\omega )x^3+a_2(\omega )x^2+a_1(\omega )x\) with strictly positive \(a_3\), and show how some suitable properties of the coefficients \(a_1, a_2\) and \(a_3\) and some factible relations among them either preclude or ensure each one of the three different bifurcation diagrams. Section 5 extends these results to more general functions \(f(\omega ,x)=(-a_3(\omega )+h(\omega ,x))x^3+a_2(\omega )x^2+a_1(\omega )x\), describing in this way other patterns fitting each one of the possibilities. And Sect. 6 begins with the description of the possibilities for the bifurcation diagrams of \(x'=f(\omega {\cdot }t,x)+\xi x^2\) to conclude with the consequence mentioned at the end of the previous paragraph.
2 Preliminaries
Throughout the paper, the map \(\sigma :{\mathbb {R}}\times \Omega \rightarrow \Omega \), \((t,\omega )\mapsto \sigma _t(\omega )=\omega {\cdot }t\) defines a global continuous flow on a compact metric space \(\Omega \), and we assume that the flow \((\Omega , \sigma )\) is minimal, that is, that every \(\sigma \)-orbit is dense in \(\Omega \). This paper will be focused on describing the bifurcation diagrams of simple parametric variations of the family
where \(f:\Omega \times {\mathbb {R}}\rightarrow {\mathbb {R}}\) is assumed to be jointly continuous, \(f_x\) and \(f_{xx}\) are supposed to exist and to be jointly continuous (which we represent as \(f\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\)), and \(f(\omega ,0)=0\) for all \(\omega \in \Omega \) (that is, \(x\equiv 0\) solves the equation). If only f and \(f_x\) are assumed to exist and to be jointly continuous, then we shall say that \(f\in C^{0,1}(\Omega \times {\mathbb {R}},{\mathbb {R}})\). Additional coercivity and concavity properties will be assumed throughout the paper. In Sect. 4, we focus on the case in which \(f(\omega ,x)\) is a cubic polynomial in the state variable x with strictly negative cubic coefficient.
We develop our bifurcation theory through the skewproduct formalism: as explained in the Introduction, our bifurcation analysis studies the variations on the global attractors and on the number and structure of minimal sets for the corresponding parametric family of skewproduct flows. In the next subsections, we summarize the most basic concepts and some basic results required in the formulations and proofs of our results. The interested reader can find in Sect. 2 of [11] more details on these matters, as well as a suitable list of references.
2.1 Scalar Skewproduct Flow
We define the local skewproduct flow on \(\Omega \times {\mathbb {R}}\) induced by (2.1) as
where \({\mathcal {I}}_{\omega ,x_0}\rightarrow {\mathbb {R}}\), \(t\mapsto u(t,\omega ,x_0)\) is the maximal solution of (2.1) with initial value \(u(0,\omega ,x_0)=x_0\), and \({\mathcal {U}}=\bigcup _{(\omega ,x_0)\in \Omega \times {\mathbb {R}}}({\mathcal {I}}_{\omega ,x_0}\times \{(\omega ,x_0)\})\). The flow \(\tau \) projects on \((\Omega ,\sigma )\), which is called its base flow. It is known that u satisfies the cocycle property \(u(t+s,\omega ,x_0)=u(t,\omega {\cdot }s,u(s,\omega ,x_0))\) whenever the right-hand term is defined; and, clearly, the flow \(\tau \) is fiber-monotone: if \(x_1<x_2\), then \(u(t,\omega ,x_1)<u(t,\omega ,x_2)\) for any t in the common interval of definition of both solutions.
2.2 Functions of Bounded Primitive
Throughout this paper, the space of continuous functions from \(\Omega \) to \({\mathbb {R}}\) will be represented by \(C(\Omega )\), the subspace of functions \(a\in C(\Omega )\) such that \(\int _\Omega a(\omega )\, dm=0\) for all \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) will be represented by \(C_0(\Omega )\), the subspace of functions \(a\in C(\Omega )\) such that the map \(t\mapsto a_\omega (t)=a(\omega {\cdot }t)\) is continuously differentiable on \({\mathbb {R}}\) will be represented by \(C^1(\Omega )\) (in this case we shall represent \(a'(\omega )=a_\omega '(0)\)), and the subspace of functions \(a\in C(\Omega )\) with continuous primitive, that is, such that there exists \(b\in C^1(\Omega )\) with \(b'=a\), will be represented by \(CP(\Omega )\).
It is frequent to refer to a function \(a\in CP(\Omega )\) as “with bounded primitive”. Let us explain briefly the reason. Recall that \((\Omega ,\sigma )\) is minimal. Then, \(a\in CP(\Omega )\) if and only if there exists \(\omega _0\in \Omega \) such that the map \(a_0:{\mathbb {R}}\rightarrow {\mathbb {R}}\), \(t\mapsto a(\omega _0{\cdot }t)\) has a bounded primitive \(b_0(t)=\int _0^t a_0(s)\, ds\), in which case this happens for all \(\omega \in \Omega \) (see e.g. Lemma 2.7 of [16] or Proposition A.1 of [19]).
It follows from Birkoff’s Ergodic Theorem that \(CP(\Omega )\subseteq C_0(\Omega )\). It is well known that \(CP(\Omega )= C_0(\Omega )\) if \((\Omega ,\sigma )\) is periodic, and Lemma 5.1 of [7] ensures that \(CP(\Omega )\) is a dense subset of \(C_0(\Omega )\) of first category in \(C_0(\Omega )\) if \((\Omega ,\sigma )\) is a minimal aperiodic flow. In addition, \(C^1(\Omega )\) is dense in \(C(\Omega )\) (see Sect. 2 of [34]).
2.3 Equilibria and Semiequilibria
Let \(\beta :\Omega \rightarrow {\mathbb {R}}\) be such that \(u(t,\omega ,\beta (\omega ))\) is defined for all \(\omega \in \Omega \) and \(t\ge 0\) (resp. \(t\le 0\)). We shall say that \(\beta \) is a \(\tau \)-equilibrium if \(\beta (\omega {\cdot }t)=u(t,\omega ,\beta (\omega ))\) for all \(\omega \in \Omega \) and \(t\in {\mathbb {R}}\), a \(\tau \)-subequilibrium (resp. time-reversed \(\tau \)-subequilibrium) if \(\beta (\omega {\cdot }t)\le u(t,\omega ,\beta (\omega ))\) for all \(\omega \in \Omega \) and \(t\ge 0\) (resp. \(t\le 0\)), and a \(\tau \)-superequilibrium (resp. time-reversed \(\tau \)-superequilibrium) if \(\beta (\omega {\cdot }t)\ge u(t,\omega ,\beta (\omega ))\) for all \(\omega \in \Omega \) and all \(t\ge 0\) (resp. \(t\le 0\)). Superequilibria and subequilibria are generally denominated semiequilibria. We will frequently omit the reference to \(\tau \) if there is no risk of confusion.
Given a Borel measure m on \(\Omega \), we shall say that \(\beta :\Omega \rightarrow {\mathbb {R}}\) is m-measurable if it is measurable with respect to the m-completion of the Borel \(\sigma \)-algebra, and we shall say that \(\beta :\Omega \rightarrow {\mathbb {R}}\) is \(C^1\) along the base orbits if \(t\mapsto \beta _\omega (t)=\beta (\omega {\cdot }t)\) is \(C^1\) on \({\mathbb {R}}\) for all \(\omega \in \Omega \), in which case we represent \(\beta '(\omega )=\beta '_\omega (0)\). Note that any \(\tau \)-equilibrium is \(C^1\) along the base orbits. We shall say that \(\beta :\Omega \rightarrow {\mathbb {R}}\) is a semicontinuous equilibrium (resp. semiequilibrium) if it is an equilibrium (resp. semiequilibrium) and a bounded semicontinuous map. A copy of the base for the flow \(\tau \) is the graph of a continuous \(\tau \)-equilibrium.
We shall say that a \(\tau \)-superequilibrium (resp. time-reversed \(\tau \)-superequilibrium) \(\beta :\Omega \rightarrow {\mathbb {R}}\) is strong if there exists \(s_*>0\) (resp. \(s_*<0\)) such that \(\beta (\omega {\cdot }s_*)>u(s_*,\omega ,\beta (\omega ))\) for all \(\omega \in \Omega \), and we shall say that a \(\tau \)-subequilibrium (resp. time-reversed \(\tau \)-subequilibrium) is strong if there exists \(s_*>0\) (resp. \(s_*<0\)) such that \(\beta (\omega {\cdot }s_*)<u(s_*,\omega ,\beta (\omega ))\) for all \(\omega \in \Omega \). Since \((\Omega ,\sigma )\) is minimal, Proposition 4.3 of [23] and its analogue in the time-reversed cases show that, if \(\beta \) is a semicontinuous strong \(\tau \)-superequilibrium (resp. time-reversed \(\tau \)-superequilibrium), then there exist \(e_0>0\) and \(s^*>0\) (resp. \(s^*<0\)) such that \(\beta (\omega )\ge u(s^*,\omega {\cdot }(-s^*),\beta (\omega {\cdot }(-s^*)))+e_0\) for all \(\omega \in \Omega \), and if \(\beta \) is a semicontinuous strong \(\tau \)-subequilibrium (resp. time-reversed \(\tau \)-subequilibrium), then there exist \(e_0>0\) and \(s^*>0\) (resp. \(s^*<0\)) such that \(\beta (\omega )\le u(s^*,\omega {\cdot }(-s^*),\beta (\omega {\cdot }(-s^*)))-e_0\) for all \(\omega \in \Omega \).
Let \(\beta :\Omega \rightarrow {\mathbb {R}}\) be \(C^1\) along the base orbits. The map \(\beta \) shall be said to be a global upper (resp. lower) solution of (2.1) if \(\beta '(\omega )\ge f(\omega ,\beta (\omega ))\) (resp. \(\beta '(\omega )\le f(\omega ,\beta (\omega ))\)) for every \(\omega \in \Omega \), and to be strict if the previous inequalities are strict for all \(\omega \in \Omega \). Some comparison arguments prove the following facts (see Sects. 3 and 4 of [23]): if every forward \(\tau \)-semiorbit is globally defined, then \(\beta \) is a \(\tau \)-superequilibrium (resp. \(\tau \)-subequilibrium) if and only if is a global upper (resp. lower) solution of (2.1), and it is strong as superequilibrium (resp. subequilibrium) if it is strict as global upper (resp. lower) solution. Analogously, if every backward \(\tau \)-semiorbit is globally defined, then \(\beta \) is a time-reversed \(\tau \)-subequilibrium (resp. time-reversed \(\tau \)-superequilibrium) if and only if it is a global upper (resp. lower) solution of (2.1), and it is strong as time-reversed subequilibrium (resp. time-reversed superequilibrium) if it is strict as global upper (resp. lower) solution.
2.4 Minimal Sets, Coercivity and Global Attractor
A set \({\mathcal {K}}\subseteq \Omega \times {\mathbb {R}}\) is \(\tau \)-invariant if it is composed by globally defined \(\tau \)-orbits, and it is minimal if it is compact, \(\tau \)-invariant and it does not contain properly any other compact \(\tau \)-invariant set. Let us recall some properties of compact \(\tau \)-invariant sets and minimal sets for the local skewproduct flow \((\Omega \times {\mathbb {R}},\tau )\) over a minimal base \((\Omega ,\sigma )\). Let \({\mathcal {K}}\subset \Omega \times {\mathbb {R}}\) be a compact \(\tau \)-invariant set. Since \((\Omega ,\sigma )\) is minimal, \({\mathcal {K}}\) projects onto \(\Omega \), that is, the continuous map \(\pi :{\mathcal {K}}\rightarrow \Omega \), \((\omega ,x)\mapsto \omega \) is surjective. In addition,
where \(\alpha _{\mathcal {K}}(\omega )=\inf \{x\in {\mathbb {R}}:\, (\omega ,x)\in {\mathcal {K}}\}\) and \(\beta _{\mathcal {K}}(\omega )=\sup \{x\in {\mathbb {R}}:\,(\omega ,x)\in {\mathcal {K}}\}\) are, respectively, lower and upper semicontinuous \(\tau \)-equilibria whose graphs are contained in \({\mathcal {K}}\). In particular, the residual sets of their continuity points are \(\sigma \)-invariant. They will be called the lower and upper delimiter equilibria of \({\mathcal {K}}\). The compact \(\tau \)-invariant set \({\mathcal {K}}\) is said to be pinched if there exists \(\omega \in \Omega \) such that the section \(({\mathcal {K}})_\omega =\{x:\,(\omega ,x)\in {\mathcal {K}}\}\) is a singleton. A \(\tau \)-minimal set \({\mathcal {M}}\subset \Omega \times {\mathbb {R}}\) is said to be hyperbolic attractive (resp. repulsive) if it is uniformly exponentially asymptotically stable at \(\infty \) (resp. \(-\infty \)). Otherwise, it is said to be nonhyperbolic.
A function \(f:\Omega \times {\mathbb {R}}\rightarrow {\mathbb {R}}\) is said to be coercive (\(\mathrm {(Co)}\) for short) if
uniformly on \(\Omega \). A stronger definition of coercivity will be needed in part of Sect. 5 and in Sect. 6: \(f:\Omega \times {\mathbb {R}}\rightarrow {\mathbb {R}}\) is said to be 2-coercive (\(\mathrm {(Co)}_2\) for short) if
uniformly on \(\Omega \). It is clear that, if f is \(\mathrm {(Co)}_2\), then it is \(\mathrm {(Co)}\). The arguments leading to Theorem 16 of [8] (see also Sect. 1.2 of [9]) ensure that, if \(f\in C^{0,1}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) is \(\mathrm {(Co)}\), then the flow \(\tau \) is globally forward defined and admits a global attractor. That is, a compact \(\tau \)-invariant set \({\mathcal {A}}\) which satisfies \(\lim _{t\rightarrow \infty } \text {dist}(\tau _t({\mathcal {C}}),{\mathcal {A}})=0\) for every bounded set \({\mathcal {C}}\subset \Omega \times {\mathbb {R}}\), where \(\tau _t({\mathcal {C}})=\{(\omega {\cdot }t,u(t,\omega ,x_0)):\, (\omega ,x_0)\in {\mathcal {C}}\}\) and
In addition, the attractor takes the form \({\mathcal {A}}=\bigcup _{\omega \in \Omega }(\{\omega \}\times [\alpha _{\mathcal {A}}(\omega ),\beta _{\mathcal {A}}(\omega )])\) and is composed by the union of all the globally defined and bounded \(\tau \)-orbits. And, as proved in Theorem 5.1(iii) of [11], any global (strict) lower solution \(\kappa \) satisfies \(\kappa \le \beta _{\mathcal {A}}\) (\(\kappa <\beta _{\mathcal {A}}\)) and a (strict) upper solution \(\kappa \) satisfies \(\kappa \ge \alpha _{\mathcal {A}}\) (\(\kappa >\alpha _{\mathcal {A}}\)). Besides, if \(\omega _1\) (resp. \(\omega _2\)) is a continuity point of \(\alpha _{{\mathcal {A}}}\) (resp. \(\beta _{{\mathcal {A}}}\)), then the set \(\mathcal M^l=\textrm{cl}_{\Omega \times \mathbb R}\{(\omega _1{\cdot }t,\alpha _{\mathcal A}(\omega _1{\cdot }t)):\,t\in {\mathbb {R}}\}\) (resp. \(\mathcal M^u=\text {cl}_{\Omega \times \mathbb R}\{(\omega _2{\cdot }t,\beta _{\mathcal A}(\omega _2{\cdot }t)):\,t\in {\mathbb {R}}\}\)) is the lower (resp. upper) \(\tau \)-minimal set, and its sections reduce to the points \(\alpha _{{\mathcal {A}}}(\omega )\) (resp. \(\beta _{\mathcal A}(\omega )\)) at all the continuity points \(\omega \) of \(\alpha _{{\mathcal {A}}}\) (resp. \(\beta _{\mathcal {A}}\)): see Theorem 3.3 of [6]. Moreover, it is easy to check by contradiction that, if \({\mathcal {M}}^l\) (resp. \({\mathcal {M}}^u\)) is hyperbolic, then it is attractive and it coincides with the graph of \(\alpha _{{\mathcal {A}}}\) (resp. \(\beta _{{\mathcal {A}}}\)), which therefore is a continuous map.
2.5 Measures and Lyapunov Exponents
We shall say that a Borel measure m on \(\Omega \) is normalized if \(m(\Omega )=1\), that it is \(\sigma \)-invariant if \(m(\sigma _t({\mathcal {B}}))=m({\mathcal {B}})\) for every \(t\in {\mathbb {R}}\) and every Borel subset \({\mathcal {B}}\subseteq \Omega \), and that it is \(\sigma \)-ergodic if it is normalized, \(\sigma \)-invariant and \(m({\mathcal {B}})\in \{0,1\}\) for every \(\sigma \)-invariant subset \({\mathcal {B}}\subseteq \Omega \). \({\mathfrak {M}}_\textrm{inv}(\Omega ,\sigma )\) and \({\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) are, respectively, the nonempty sets of normalized \(\sigma \)-invariant and \(\sigma \)-ergodic Borel measures on \(\Omega \). The flow \((\Omega ,\sigma )\) is said to be uniquely ergodic if \({\mathfrak {M}}_\text {inv}(\Omega ,\sigma )\) reduces to just one element m, in which case m is ergodic; and it is said to be finitely ergodic if \({\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) is a finite set.
The Lyapunov exponent of \(a\in C(\Omega )\) with respect to \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) is
The family of scalar linear differential equations \(x'=a(\omega {\cdot }t)\,x\) has exponential dichotomy over \(\Omega \) if there exist \(k\ge 1\) and \(\delta >0\) such that either
or
The set of \(\lambda \in {\mathbb {R}}\) such that the family \(x'=(a(\omega {\cdot }t)-\lambda )\,x\) does not have exponential dichotomy over \(\Omega \) is called the Sacker and Sell spectrum of \(a\in C(\Omega )\), and represented by \(\textrm{sp}(a)\). Recall that \(\Omega \) is connected, since \((\Omega ,\sigma )\) is minimal. The arguments in [18] and [33] show the existence of \(m^l,m^u\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) such that \(\textrm{sp}(a)=\left[ \gamma _a(\Omega ,m^l),\gamma _a(\Omega ,m^u)\right] \), and also that \(\int _\Omega a(\omega )\,dm\in \textrm{sp}(a)\) for any \(m\in {\mathfrak {M}}_\textrm{inv}(\Omega ,\sigma )\). We shall say that a has band spectrum if \(\textrm{sp}(a)\) is a nondegenerate interval and that a has point spectrum if \(\textrm{sp}(a)\) reduces to a point. As seen in Sect. 2.2, \(\textrm{sp}(a)=\{0\}\) if \(a\in C_0(\Omega )\).
On the other hand, assume that \(f\in C^{0,1}(\Omega \times {\mathbb {R}},{\mathbb {R}})\), where f is the function on the right hand side of (2.1). The Lyapunov exponent of a compact \(\tau \)-invariant set \({\mathcal {K}}\subset \Omega \times {\mathbb {R}}\) with respect to \(\nu \in {\mathfrak {M}}_\textrm{erg}({\mathcal {K}},\tau )\) is
We will frequently omit the subscript \(f_x\) if no confusion may arise. We will refer to the Sacker and Sell spectrum of \(f_x:{\mathcal {K}}\rightarrow {\mathbb {R}}\) as the Sacker and Sell spectrum of \(f_x\) on a compact \(\tau \)-invariant set \({\mathcal {K}}\subset \Omega \times {\mathbb {R}}\). Since \((\Omega ,\sigma )\) is a minimal flow, a \(\tau \)-minimal set \({\mathcal {M}}\subset \Omega \times {\mathbb {R}}\) is nonhyperbolic if and only if 0 belongs to the Sacker and Sell spectrum of \(f_x\) on \({\mathcal {M}}\). Moreover, Proposition 2.8 of [6] proves that \({\mathcal {M}}\) is an attractive (resp. repulsive) hyperbolic copy of the base if and only if all its Lyapunov exponents are strictly negative (resp. positive).
Theorems 1.8.4 of [4] and 4.1 of [14] provide a fundamental characterization of the set \({\mathfrak {M}}_\textrm{erg}({\mathcal {K}},\tau )\) given by the \(\tau \)-ergodic measures concentrated on a compact \(\tau \)-invariant set \({\mathcal {K}}\subset \Omega \times {\mathbb {R}}\): for any \(\nu \in {\mathfrak {M}}_\textrm{erg}({\mathcal {K}},\tau )\), there exists an m-measurable \(\tau \)-equilibrium \(\beta :\Omega \rightarrow {\mathbb {R}}\) with graph contained in \({\mathcal {K}}\) such that, for every continuous function \(g:\Omega \times {\mathbb {R}}\rightarrow {\mathbb {R}}\),
where \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) is the ergodic measure on which \(\nu \) projects, given by \(m(A)=\nu ((A\times {\mathbb {R}})\cap {\mathcal {K}})\). In particular, the Lyapunov exponent on \({\mathcal {K}}\) for (2.1) with respect to any \(\tau \)-ergodic measure projecting onto m is given by an integral of the form \(\int _\Omega f_x(\omega ,\beta (\omega ))\, dm\). The converse also holds: any m-measurable \(\tau \)-equilibrium \(\beta :\Omega \rightarrow {\mathbb {R}}\) with graph in \({\mathcal {K}}\) defines \(\nu \in {\mathfrak {M}}_{\textrm{erg}}({\mathcal {K}},\tau )\) projecting onto m by (2.3). Note that \(\beta _1\) and \(\beta _2\) define the same measure if and only if they coincide m-a.e.
2.6 Strict D-Concavity
We shall say that \(f\in C^{0,1}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) is d-concave (\(\mathrm {(DC)}\) for short) if its derivative \(f_x\) is concave on \({\mathbb {R}}\) for all \(\omega \in \Omega \). With the purpose of measuring the degree of strictness of the concavity of \(f_x\), the standardized \(\epsilon \)-modules of d-concavity of f on a compact interval J were introduced in [11], and several subsets of strictly d-concave functions of \(C^{0,1}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) were defined in terms of these modules. In this paper, we will only be interested in the set \(\mathrm {(SDC)_*}\) of strictly d-concave functions with respect to every measure (see Definition 3.8 of [11]). Proposition 3.9 of [11] gives a characterization of this set of functions which will be sufficient for the purposes of this paper: \(f\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) is \(\mathrm {(SDC)}_*\) if and only if \(m(\{\omega \in \Omega :\, f_{xx}(\omega ,\cdot )\) is strictly decreasing on \(J\})>0\) for every compact interval J and every \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\). In particular, it can be easily checked that any polynomial of the form \(p(\omega ,x)=-a_3(\omega )x^3+a_2(\omega )x^2+a_1(\omega )x+a_0(\omega )\), where the coefficients are continuous and \(\Omega \) and \(a_3\) is nonnegative and nonzero, is \(\mathrm {(SDC)}_*\), since \(p_{xx}(\omega ,\cdot )\) is strictly decreasing on \({\mathbb {R}}\) for every \(\omega \) on an open subset of \(\Omega \) (recall that the minimality of \((\Omega ,\sigma )\) ensures that every open set has positive m-measure for all \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\)).
Assume that the function f of (2.1) is \(\mathrm {(SDC)}_*\). Following the methods of [26] and [35], Theorems 4.1 and 4.2 of [11] state relevant dynamical properties of the local skewproduct flow \(\tau \) in terms of the previous properties. Let \({\mathcal {K}}\subset \Omega \times {\mathbb {R}}\) be a compact \(\tau \)-invariant set. Then, there exist at most three distinct \(\tau \)-invariant measures of \({\mathfrak {M}}_\textrm{erg}({\mathcal {K}},\tau )\) which project onto m. Moreover, if there exist three such measures \(\nu _1\), \(\nu _2\) and \(\nu _3\) projecting onto m, and they are respectively given by the m-measurable equilibria \(\beta _1\), \(\beta _2\) and \(\beta _3\) (see (2.3)) with \(\beta _1(\omega )<\beta _2(\omega )<\beta _3(\omega )\) for m-a.e. \(\omega \in \Omega \), then \(\gamma _{f_x}({\mathcal {K}},\nu _1)<0\), \(\gamma _{f_x}({\mathcal {K}},\nu _2)>0\) and \(\gamma _{f_x}({\mathcal {K}},\nu _3)<0\). In addition, \({\mathcal {K}}\) contains at most three disjoint compact \(\tau \)-invariant sets, and if it contains exactly three, then they are hyperbolic copies of the base: attractive the upper and lower ones, and repulsive the middle one. These properties will be often combined with those established in Proposition 5.3 of [11]: if f is coercive and either if there exists a repulsive hyperbolic \(\tau \)-minimal set or if there exist two hyperbolic \(\tau \)-minimal sets, then there exist three \(\tau \)-minimal sets.
3 Generalized Pitchfork Bifurcation Patterns
Let \((\Omega ,\sigma )\) be a minimal flow, and let \(f\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) be \(\mathrm {(Co)}\) and \(\mathrm {(SDC)}_*\), and satisfy \(f(\omega ,0)=0\) for every \(\omega \in \Omega \). The description of the global bifurcation diagram for the family
with respect the real parameter \(\lambda \) was initiated in Sect. 6 of [11] and is completed in Theorem 3.1. We denote by \({\mathcal {I}}_{\omega ,x_0}^\lambda \rightarrow {\mathbb {R}}\), \(t\mapsto u_\lambda (t,\omega ,x_0)\) the maximal solution of (3.1)\(_\lambda \) with initial value \(u_\lambda (0,\omega ,x_0)=x_0\), and by \(\tau _\lambda \) the corresponding local skewproduct flow induced by (3.1)\(_\lambda \); i.e., \(\tau _\lambda (t,\omega ,x_0)=(\omega {\cdot }t,u_\lambda (t,\omega ,x_0))\). The coercivity property ensures the existence of the global attractor \({\mathcal {A}}_\lambda \) for all \(\lambda \in {\mathbb {R}}\). Theorems 5.1 and 6.2 of [11] describe the structure of \({\mathcal {A}}_\lambda \) and its variation with respect to \(\lambda \): it can be written as
where: \(\alpha _\lambda :\Omega \rightarrow {\mathbb {R}}\) and \(\beta _\lambda :\Omega \rightarrow {\mathbb {R}}\) are lower and upper semicontinuous \(\tau _\lambda \)-equilibria; \(\alpha _\lambda (\omega )\le 0\le \beta _\lambda (\omega )\) for all \(\omega \in \Omega \); the maps \(\lambda \mapsto \beta _\lambda (\omega )\) and \(\lambda \mapsto \alpha _\lambda (\omega )\) are respectively nondecreasing and nonincreasing on \({\mathbb {R}}\) for all \(\omega \in \Omega \) and both are right-continuous; \(\lim _{\lambda \rightarrow \infty }\alpha _\lambda (\omega )=-\infty \) and \(\lim _{\lambda \rightarrow \infty }\beta _\lambda (\omega )=\infty \) uniformly on \(\Omega \); and there exists \(\lambda _*\in {\mathbb {R}}\) such that \({\mathcal {A}}_\lambda =\Omega \times \{0\}\) and it is hyperbolic attractive for every \(\lambda <\lambda _*\). We represent by \({\mathcal {M}}^l_\lambda \) and \({\mathcal {M}}^u_\lambda \) the lower and upper \(\tau _\lambda \)-minimal sets, and recall that any of them is hyperbolic if and only it is hyperbolic attractive, in which case it coincides with the graph of the corresponding delimiter equilibrium of \({\mathcal {A}}_\lambda \) (see Sect. 2.4).
Let \(\{\kappa _\lambda ^1:\lambda \in (\lambda _1,\lambda _2)\}\) and \(\{\kappa _\lambda ^2:\lambda \in (\lambda _1,\lambda _2)\}\) be two families of \(\tau _\lambda \)-equilbria. We will say that \(\kappa ^1_\lambda \) and \(\kappa ^2_\lambda \) collide (or that \(\kappa ^1_\lambda \) collides with \(\kappa ^2_\lambda \)) as \(\lambda \downarrow \lambda _1\) or \(\lambda \uparrow \lambda _2\) on a residual set \({\mathcal {R}}\subseteq \Omega \) if the limit of the difference \(\kappa _\lambda ^1(\omega )-\kappa _\lambda ^2(\omega )\) vanishes for all \(\omega \in {\mathcal {R}}\). The same terminology will be used for the different parametric families of flows appearing throughout the paper.
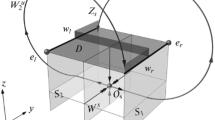
Theorem 3.1 describes the possibilities for the global bifurcation diagram, which are depicted in Figs. 1 and 2. Its proof is given after a required technical result, Lemma 3.2.
Theorem 3.1
Let \(f\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) be \(\mathrm {(Co)}\) and \(\mathrm {(SDC)}_*\), and let \([-\lambda _+,-\lambda _-]\) be the Sacker and Sell spectrum of \(f_x\) on \({\mathcal {M}}_0=\Omega \times \{0\}\), with \(\lambda _-\le \lambda _+\). Then, \({\mathcal {M}}_0\) is hyperbolic attractive (resp. repulsive) if \(\lambda <\lambda _-\) (resp. \(\lambda >\lambda _+\)) and nonhyperbolic if \(\lambda \in [\lambda _-,\lambda _+]\); \(\tau _\lambda \) admits three different hyperbolic minimal sets \({\mathcal {M}}_\lambda ^l<{\mathcal {M}}_0<{\mathcal {M}}_\lambda ^u\) for \(\lambda >\lambda _+\), where \({\mathcal {M}}_\lambda ^l\) and \({\mathcal {M}}_\lambda ^u\) are hyperbolic attractive and given by the graphs of \(\alpha _\lambda \) and \(\beta _\lambda \) respectively; and either \(\alpha _\lambda \) or \(\beta _\lambda \) (or both of them) collide with 0 on a residual \(\sigma \)-invariant set as \(\lambda \downarrow \lambda _+\).

Local saddle-node and transcritical bifurcation diagrams described in Theorem 3.1(i). The left one corresponds to \(\lambda _-=\lambda _+\) and the right one to \(\lambda _-<\lambda _+\). The solid red curves represent the families of attractive hyperbolic solutions of the \(\lambda \)-parametric family (3.1): \(\alpha _\lambda \) for \(\lambda \ne \lambda _0\) and \(\beta _\lambda \) for \(\lambda \notin [\lambda _-,\lambda _+]\). The blue curve represents the family of repulsive hyperbolic solutions of (3.1): \(\kappa _\lambda \) for \(\lambda \in (\mu _-,\lambda _-)\cup (\lambda _+,\infty )\). In the first diagram, a large black point with abscissa \(\lambda _0\) represents the complex possibilities which arise for the collision of \(\alpha _\lambda \) and \(\kappa _\lambda \) as \(\lambda \downarrow \lambda _0\), which is partly explained in the left zoom: the limit maps \(\alpha _{\lambda _0}\) and \(\kappa _{\lambda _0}\) are not necessarily continuous, but lower and upper semicontinuous; they take the same value for a residual invariant set of points \(\omega \); but this residual set may (not necessarily) coexist with a nonempty invariant set \(\Omega _0\varsubsetneq \Omega \) at whose points \(\alpha _{\lambda _0}(\omega )<\kappa _{\lambda _0}(\omega )\); and the set \(\Omega _0\) can have measure 0 or 1 for an ergodic measure on \(\Omega \). The situation is analogous for all \(\lambda =\lambda _\pm \) with the maps \(\kappa _{\lambda _\pm }\) and \(\beta _{\lambda _\pm }\) given by the limits of \(\kappa _\lambda \) as \(\lambda \uparrow \lambda _-(=\lambda _+)\) and of \(\beta _\lambda \) as \(\lambda \downarrow \lambda _+(=\lambda _-)\), and represented by “\(\kappa _{\lambda _\pm }\le \beta _{\lambda _\pm }\)" and the large black point. The hyperbolic minimal sets are given by the graphs of the curves \(\alpha _\lambda \), \(\kappa _\lambda \) and \(\beta _\lambda \) whenever they are hyperbolic. A nonhyperbolic minimal set \({\mathcal {M}}^l_{\lambda _0}\) exists for \(\lambda _0\), lying in the region delimited by the graphs of \(\alpha _{\lambda _0}\) and \(\kappa _{\lambda _0}\), and with a possibly highly complex shape. The situation is, again, analogous for \(\lambda _-(=\lambda _+)\), and no more minimal sets exist for any \(\lambda \). The green-shadowed area represents the global attractor \({\mathcal {A}}_{\lambda }\), and the light grey arrows just try to depict the attracting and repelling properties of \(\alpha _\lambda \), \(\kappa _\lambda \) and \(\beta _\lambda \). In the second diagram, besides the features already described for the first one, \({\mathcal {M}}_0\) is a nonhyperbolic minimal set for \(\lambda \in [\lambda _-,\lambda _+]\), and \(\beta _\lambda \) is not identically zero for \(\lambda \in (\lambda _-,\lambda _+]\), as deduced from the existence of \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) with \(\int _{\Omega }(f_x(\omega ,0)+\lambda )\,dm>0\) and Proposition 5.2 of [11], which ensures that \(\int _{\Omega }(f_x(\omega ,\beta _{\lambda }(\omega ))+\lambda )\,dm\le 0\). (We will use “large black points" and analogous inequalities in the remaining figures to depict similar situations, as well as red and blue “hyperbolic" curves, green-shadowing, and grey arrows) (Color figure online)

The classical pitchfork bifurcation (left and center) and generalized pitchfork bifurcation (right) diagrams described in Theorem 3.1(ii) and (iii). In the last case, the possible existence of one or two nonhyperbolic minimal sets at \(\lambda _0\) is depicted by a solid-filled purple eight, and it will be proved in a forthcoming paper. See Fig. 1 to understand the meaning of the remaining elements
Assume that this is the case for \(\beta _\lambda \). Then, one of the following situations holds:
-
(i)
(Local saddle-node and transcritical bifurcations). There exists \(\lambda _0<\lambda _-\) such that: \({\mathcal {A}}_\lambda ={\mathcal {M}}_0\) for \(\lambda <\lambda _0\); \(\tau _{\lambda _0}\) admits exactly two different minimal sets \({\mathcal {M}}_{\lambda _0}^l<{\mathcal {M}}_0\), with \({\mathcal {M}}_{\lambda _0}^l\) nonhyperbolic; \(\tau _\lambda \) admits three hyperbolic minimal sets \({\mathcal {M}}_\lambda ^l<{\mathcal {N}}_\lambda <{\mathcal {M}}_0\) for \(\lambda \in (\lambda _0,\lambda _-)\), where \({\mathcal {M}}_\lambda ^l\) is hyperbolic attractive and given by the graph of \(\alpha _\lambda \), and \({\mathcal {N}}_\lambda \) is hyperbolic repulsive and given by the graph of a continuous map \(\kappa _\lambda :\Omega \rightarrow {\mathbb {R}}\) which increases strictly as \(\lambda \) increases in \((\lambda _0,\lambda _-)\), and which collides with \(\alpha _\lambda \) (resp. with 0) on a residual \(\sigma \)-invariant set as \(\lambda \downarrow \lambda _0\) (resp. \(\lambda \uparrow \lambda _-\)); and \(\tau _\lambda \) admits exactly two minimal sets \({\mathcal {M}}_\lambda ^l<{\mathcal {M}}_0\) for \(\lambda \in [\lambda _-,\lambda _+]\), where \({\mathcal {M}}_\lambda ^l\) is hyperbolic attractive and given by the graph of \(\alpha _\lambda \). In particular, \(\lambda _0\), \(\lambda _-\) and \(\lambda _+\) are the unique bifurcation points: a local saddle-node bifurcation of minimal sets occurs around \({\mathcal {M}}_{\lambda _0}\) at \(\lambda _0\), as well as a discontinuous bifurcation of attractors; and a classical (resp. generalized) transcritical bifurcation of minimal sets arises around \({\mathcal {M}}_0\) at \(\lambda _-\) (resp. on \([\lambda _-,\lambda _+]\)) if \(\lambda _-=\lambda _+\) (resp. \(\lambda _-<\lambda _+\)).
-
(ii)
(Classical pitchfork bifurcation). \({\mathcal {M}}_0\) is the unique \(\tau _\lambda \)-minimal set if \(\lambda \le \lambda _+\), and \({\mathcal {A}}_\lambda ={\mathcal {M}}_0\) if \(\lambda <\lambda _-\); and both \(\alpha _\lambda \) and \(\beta _\lambda \) collide with 0 on a residual \(\sigma \)-invariant set as \(\lambda \downarrow \lambda _+\). A classical pitchfork bifurcation of minimal sets arises around \({\mathcal {M}}_0\) at \(\lambda _+\).
-
(iii)
(Generalized pitchfork bifurcation). \(\lambda _-<\lambda _+\) and there exists \(\lambda _0\in [\lambda _-,\lambda _+)\) such that: \({\mathcal {M}}_0\) is the unique \(\tau _\lambda \)-minimal set if \(\lambda <\lambda _0\) and \({\mathcal {A}}_\lambda ={\mathcal {M}}_0\) if \(\lambda <\lambda _-\); and \(\tau _\lambda \)-admits two minimal sets \({\mathcal {M}}_\lambda ^l<{\mathcal {M}}_0\) for \(\lambda \in (\lambda _0,\lambda _+]\), where \({\mathcal {M}}_\lambda ^l\) is hyperbolic attractive and given by the graph of \(\alpha _\lambda \). A generalized pitchfork bifurcation of minimal sets around \({\mathcal {M}}_0\) on \([\lambda _-,\lambda _+]\) arises, with \(\lambda _0\) and \(\lambda _+\) as bifurcation points.
The possibilities for the bifurcation diagram are symmetric with respect to the horizontal axis to those described if \(\alpha _\lambda \) collides with 0 as \(\lambda \downarrow \lambda _+\).
Lemma 3.2
Let \(f\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) be \(\mathrm {(Co)}\) and \((\textrm{SDC})_*\) and satisfy \(f(\omega ,0)=0\) for all \(\omega \in \Omega \). Assume that there exist exactly two minimal sets \({\mathcal {M}}^l<{\mathcal {M}}_0\) (resp. \(\mathcal M^u>{\mathcal {M}}_0\)) for the local skewproduct flow \(\tau \) defined by the solutions \(u(t,\omega ,x_0)\) of the family \(x'=f(\omega {\cdot }t,x)\), with \({\mathcal {M}}^l\) (resp. \({\mathcal {M}}^u\)) hyperbolic attractive. Assume also that \(\int _\Omega f_x(\omega ,0)\,dm\ne 0\) for an \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\). Then, there exist a lower semicontinuous \(\tau \)-equilibrium \(\kappa _1:\Omega \rightarrow (-\infty ,0]\) and an upper semicontinuous \(\tau \)-equilibrium \(\kappa _2:\Omega \rightarrow [0,\infty )\) which take the value 0 on the residual \(\sigma \)-invariant sets of their continuity points and such that \(\int _\Omega f_x(\omega ,\kappa _1(\omega ))\,dm>0\) and \(\int _\Omega f_x(\omega ,\kappa _2(\omega ))\,dm<0\) (resp. \(\int _\Omega f_x(\omega ,\kappa _1(\omega ))\,dm<0\) and \(\int _\Omega f_x(\omega ,\kappa _2(\omega ))\,dm>0\)). Moreover,
where the \(\tau \)-equilibrium \(\alpha \) (resp. \(\beta \)) is the lower (resp. upper) delimiter of the global attractor, with graph \({\mathcal {M}}^l\) (resp. \({\mathcal {M}}^u\)).
Proof
Proposition 5.3(ii) of [11] ensures the nonhyperbolicity of \({\mathcal {M}}_0\). We reason in the case \({\mathcal {M}}^l<{\mathcal {M}}_0\). Theorem 5.12 of [11] ensures that the \(\xi \)-bifurcation diagram for \(x'=f(\omega {\cdot }t,x)+\xi \) is described by Theorem 5.10 of [11], with 0 as left local saddle-node bifurcation point, at which the upper (nonhyperbolic) minimal set is \({\mathcal {M}}_0\). As explained in the proof of Theorem 5.10 of [11], \({\mathcal {M}}_0\) is contained on a compact \(\tau \)-invariant pinched set \(\bigcup _{\omega \in \Omega } \big (\{\omega \}\times [\kappa _1(\omega ),\kappa _2(\omega )]\big )\), where: \(\kappa _1:\Omega \rightarrow (-\infty ,0]\) (called \(\kappa \) in [11]) is a lower semicontinuous \(\tau \)-equilibrium; \(\kappa _2:\Omega \rightarrow (-\infty ,0]\) (called \(\beta \) in [11]) is the upper delimiter of the global attractor; and both of them coincide (and hence take the value 0) on the residual set of their common continuity points (and hence at all their continuity points: see Proposition 2.4 of [11]). Since \(\int _\Omega f_x(\omega ,0)\, dm\ne 0\), Proposition 5.11(i) of [11] ensures that \(\int _\Omega f_x(\omega ,\kappa _1(\omega ))\,dm>0\) and \(\int _\Omega f_x(\omega ,\kappa _2(\omega ))\,dm\,<0\).
Let us check the last assertion, also in the case \({\mathcal {M}}^l<{\mathcal {M}}_0\). Recall that the hyperbolic attractiveness of \({\mathcal {M}}^l\) ensures that it coincides with the graph of \(\alpha \), which is continuous, and that every global strict upper solution is strictly greater than \(\alpha \) (see Sect. 2.4). Since \(\kappa _1\) is a \(\tau \)-equilibrium, \(\kappa _1(\omega )\ge \sup \{x_0\in {\mathbb {R}}:\,\lim _{t\rightarrow \infty }(u(t,\omega ,x_0)-\alpha (\omega {\cdot }t))=0\}\) for all \(\omega \in \Omega \). We fix \(\omega _0\) to check that \(\lim _{t\rightarrow \infty }(u(t,\omega _0,x_0)-\alpha (\omega _0{\cdot }t))=0\) for any \(x_0<\kappa _1(\omega _0)\). The \(\xi \)-bifurcation diagram for \(x'=f(\omega {\cdot }t,x)+\xi \) described by Theorem 5.10 of [11] ensures the existence of \(\xi _+>0\) and strictly negative continuous equilibria \(\kappa _\xi :\Omega \rightarrow {\mathbb {R}}\) of \(x'=f(\omega {\cdot }t,x)+\xi \) for \(\xi \in (0,\xi _+)\) which decrease strictly as \(\xi \) increases and such that \(\kappa _1(\omega )=\lim _{\xi \downarrow 0}\kappa _\xi (\omega )\) for all \(\omega \in \Omega \). Hence, for any \(x_0<\kappa _1(\omega _0)\), there exists \(\xi _0>0\) such that \(x_0<\kappa _{\xi _0}(\omega _0)\). Since \(\kappa _{\xi _0}\) is a strict upper solution of \(x'=f(\omega {\cdot }t,x)\) and hence a strong \(\tau \)-superequilibrium, the \({\varvec{\upomega }}\)-limit for \(\tau \) of \((\omega _0,x_0)\) is strictly below the graph of \(\kappa _{\xi _0}\) (see Sect. 2.3), so this \(\varvec{\upomega }\)-limit contains \({\mathcal {M}}^l\), which is the unique \(\tau \)-minimal set strictly below it. Therefore, there exists a sequence \(\{t_n\}\uparrow \infty \) such that \(\lim _{n\rightarrow \infty }(u(t_n,\omega _0,x_0)-\alpha (\omega _0{\cdot }t_n))=0\), and the hyperbolic attractiveness of \({\mathcal {M}}^l\) ensures that \(\lim _{t\rightarrow \infty }(u(t,\omega _0,x_0)-\alpha (\omega _0{\cdot }t))=0\), as asserted.
The proof is analogous in the other case. \(\square \)
Proof of Theorem 3.1
The Sacker and Sell spectrum of \(f_x+\lambda \) on \({\mathcal {M}}_0\) is \([-\lambda _++\lambda , -\lambda _-+\lambda ]\), which ensures the stated hyperbolicity properties of \({\mathcal {M}}_0\) (see Sect. 2.5). As in Theorem 6.3 of [11], we define
which, as proved there, belong to \((-\infty ,\lambda _+]\). This property guarantees the stated structure of the \(\tau _\lambda \)-minimal sets for \(\lambda >\lambda _+\), since there exist at most three \(\tau _\lambda \)-minimal sets (see Sect. 2.6). Theorem 6.3(ii) of [11] also ensures that at least one of these two parameters \(\mu _-\), \(\mu _+\) coincides with \(\lambda _+\), which proves the stated collision properties for \(\alpha _\lambda \) or for \(\beta _\lambda \) as \(\lambda \downarrow \lambda _+\). As in the statement, we assume that this is the case for \(\beta _\lambda \), i.e., that \(\mu _+=\lambda _+\). Then, since \(\lambda \mapsto \beta _\lambda (\omega )\) is nondecreasing for all \(\omega \in \Omega \) and the intersection of two residual sets is also residual, \({\mathcal {M}}_0\) is the upper minimal set for all \(\lambda \le \lambda _+\). If also \(\mu _-=\lambda _+\), then Theorem 6.3(iii) of [11] ensures that the bifurcation diagram is that of (ii). If \(\mu _-<\lambda _-\), then Theorem 6.4 of [11] shows that the diagram is that of (i), with \(\lambda _0=\mu _-\). The remaining case is, hence, \(\mu _-\in [\lambda _-,\lambda _+)\). We will check that, in this case, the situation is that of (iii), which will complete the proof.
Let us call \(\lambda _0=\mu _-\). Notice that, if \(\lambda \in (\lambda _0,\lambda _+]\), then there exist only two \(\tau _\lambda \)-minimal sets, as otherwise the nonhyperbolicity of \({\mathcal {M}}_0\) would be contradicted (see Sect. 2.6); and, as explained before, \({\mathcal {M}}_\lambda ^l\) is hyperbolic attractive (and given by the graph of \(\alpha _\lambda \)). Consequently, it only remains to prove that \(\alpha _\lambda (\omega )=0\) on the residual \(\sigma \)-invariant set of its continuity points for \(\lambda <\lambda _0\). This will ensure that \({\mathcal {M}}_0\) is the unique \(\tau _\lambda \)-minimal set for \(\lambda <\lambda _0\), and the hyperbolic attractiveness of \({\mathcal {M}}_0\) for \(\lambda <\lambda _-\) will ensure that \({\mathcal {A}}_\lambda ={\mathcal {M}}_0\) for \(\lambda <\lambda _-\) (see Theorem 3.4 of [6]). Recall also that \(\alpha _\lambda \) vanishes at all its continuity points if it vanishes at one of them (see e.g. Proposition 2.5 of [11]).
First, let us assume that \({\mathcal {M}}_{\lambda _0}^l={\mathcal {M}}_0\), which means that \(\alpha _{\lambda _0}(\omega )=0\) on the residual set of its continuity points (see Sect. 2.4). Therefore, the same happens with \(\alpha _\lambda \) if \(\lambda <\lambda _0\), since \(\alpha _{\lambda _0}\le \alpha _\lambda \le 0\) and the intersection of two residual sets is also residual. This proves the result in this case.
So, we assume \({\mathcal {M}}_{\lambda _0}^l<{\mathcal {M}}_0\), which in particular ensures that \(\alpha _{\lambda _0}(\omega )<0\) for all \(\omega \in \Omega \). Let us take \(\lambda >\lambda _0\). Lemma 3.2 shows that the upper delimiter of the basin of attraction of the graph of \(\alpha _\lambda \) is a lower semicontinuous \(\tau _\lambda \)-equilibrium \(\kappa ^1_\lambda :\Omega \rightarrow (-\infty ,0]\) which vanishes at its continuity points, with \(\kappa ^1_\lambda >\alpha _\lambda \), and which satisfies \(\int _\Omega (f_x(\omega ,\kappa ^1_\lambda (\omega ))+\lambda )\, dm>0\) whenever \(\int _\Omega (f_x(\omega ,0)+\lambda )\, dm<0\). In particular, since m is ergodic, \(\kappa ^1_\lambda <0\) m-a.e. whenever \(\int _\Omega (f_x(\omega ,0)+\lambda )\, dm<0\). Let us check that the map \(\lambda \mapsto \kappa ^1_\lambda (\omega )\) is nondecreasing on \((\lambda _0,\infty )\) for all \(\omega \in \Omega \). It is easy to deduce from the hyperbolicity of the graph \({\mathcal {M}}_{\lambda }^l\) of \(\alpha _\lambda \) that \(x<\kappa _{\lambda }^1(\omega )\) if and only if \({\mathcal {M}}_{\lambda }^l\) is the \(\varvec{\upomega }\)-limit for \(\tau _\lambda \) of \((\omega ,x)\). We take \(\lambda _0<\lambda _1<\lambda _2\), \(\omega \in \Omega \) and \(x<\kappa ^1_{\lambda _1}(\omega )\). Then, \(u_{\lambda _2}(t,\omega ,x)<u_{\lambda _1}(t,\omega ,x)<\kappa ^1_{\lambda _1}(\omega {\cdot }t)\) for all \(t\ge 0\), which precludes the possibility that \(\mathcal M_0\) is contained in the \(\varvec{\upomega }\)-limit set for \(\tau _{\lambda _2}\) of \((\omega ,x)\) and hence guarantees that \(x<\kappa ^1_{\lambda _2}(\omega )\). This proves the assertion. As a consequence of this nondecreasing character, the map \(\kappa ^1_{\lambda _0}(\omega )=\lim _{\lambda \downarrow \lambda _0}\kappa ^1_\lambda (\omega )\) is well defined, and it satisfies \(\alpha _{\lambda _0}(\omega )\le \kappa ^1_{\lambda _0}(\omega )\le \kappa ^1_{\lambda }(\omega )\) for all \(\omega \in \Omega \) if \(\lambda >\lambda _0\). It is clear that \(\kappa ^1_{\lambda _0}\) it is an m-measurable \(\tau _{\lambda _0}\)-equilibrium for every \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\).
Let \(\beta _{{\mathcal {M}}}\) be the upper delimiter \(\tau _{\lambda _0}\)-equilibrium of \({\mathcal {M}}_{\lambda _0}^l\). Our next purpose is to check that there exist points \(\omega _0\in \Omega \) with \(\kappa _{\lambda _0}^1(\omega _0)\le \beta _{\mathcal M}(\omega _0)\). Since \({\mathcal {M}}_{\lambda _0}^l\) is nonhyperbolic, there exists \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) and an m-measurable \(\tau _{\lambda _0}\)-equilibrium \({{\tilde{\kappa }}}\) with graph in \({\mathcal {M}}_{\lambda _0}^l\) such that \(\int _\Omega (f_x(\omega ,{{\tilde{\kappa }}}(\omega ))+\lambda _0)\, dm\ge 0\) (see Sect. 2.5). Proposition 4.4 of [11] ensures that \(\int _\Omega (f_x(\omega ,0)+\lambda _0)\, dm<0\), so \(\int _\Omega (f_x(\omega ,0)+\lambda )\, dm<0\) for \(\lambda \ge \lambda _0\) close enough. Therefore, as seen before, \(\kappa ^1_\lambda (\omega )<0\) m-a.e. for these values of the parameter, and hence \(\kappa ^1_{\lambda _0}(\omega )<0\) m-a.e. Assume for contradiction that \(\kappa _{\lambda _1}^1(\omega )>\beta _{{\mathcal {M}}}(\omega )\) for all \(\omega \in \Omega \), and hence that \(\kappa _{\lambda _1}^1(\omega )>{{\tilde{\kappa }}}(\omega )\) for all \(\omega \in \Omega \). Then, 0, \(\kappa ^1_{\lambda _0}\) and \({{\tilde{\kappa }}}\) define three different \(\tau _{\lambda _0}\)-ergodic measures by (2.3). This ensures that \(\int _\Omega (f_x(\omega ,{{\tilde{\kappa }}}(\omega ))+\lambda _0)\,dm<0\) (see Sect. 2.6), which is not the case. This proves the assertion.
Finally, let us fix \(\lambda <\lambda _0\) and check that \(\alpha _\lambda (\omega )=0\) at one of its continuity points, which completes the proof. Propositions 6.1 and 2.1 of [11] show the existence of \(s^*>0\) such that \(\beta _{{\mathcal {M}}}(\omega )<u_\lambda (s^*,\omega {\cdot }(-s^*),\alpha _{\lambda _0}(\omega {\cdot }(-s^*)))\le \alpha _\lambda (\omega )\) for all \(\omega \in \Omega \) (the last inequality follows from the flow monotonicity and the nonincreasing character of \(\lambda \mapsto \alpha _\lambda (\omega )\)). We take \(\omega _0\in \Omega \) with \(\kappa _{\lambda _0}^1(\omega _0)\le \beta _{\mathcal M}(\omega _0)\). Then, \(\lim _{\lambda \downarrow \lambda _0}\kappa ^1_\lambda (\omega _0)=\kappa ^1_{\lambda _0}(\omega _0)\le \beta _{\mathcal {M}}(\omega _0)<\alpha _\lambda (\omega _0)\). Therefore, there exists \(\xi >\lambda _0\) close enough to get \(\kappa ^1_\xi (\omega _0)<\alpha _\lambda (\omega _0)\). Consequently, since \(\xi >\lambda \) and hence the nonpositive semicontinuous map \(\kappa ^1_\xi \) is a global lower solution for (3.1)\(_\lambda \), \(\kappa ^1_\xi (\omega _0{\cdot }t)\le u_\lambda (t,\omega _0,\kappa ^1_\xi (\omega _0))<u_\lambda (t,\omega _0,\alpha _\lambda (\omega _0))=\alpha _\lambda (\omega _0{\cdot }t)\) for all \(t>0\). Let \(\omega _1\) be a common continuity point of \(\kappa ^1_\xi \) and \(\alpha _\lambda \). As \((\Omega ,\sigma )\) is minimal, there exists a sequence \(\{t_n\}\uparrow \infty \) such that \(\omega _0{\cdot }t_n\rightarrow \omega _1\) as \(n\rightarrow \infty \). Since \(\kappa ^1_\xi \) vanishes at \(\omega _1\), \(0=\kappa ^1_\xi (\omega _1)=\lim _{n\rightarrow \infty } \kappa ^1_\xi (\omega _0{\cdot }t_n)\le \lim _{n\rightarrow \infty }\alpha _\lambda (\omega _0{\cdot }t_n)=\alpha _\lambda (\omega _1)\le 0\). That is, \(\alpha _\lambda (\omega _1)=0\), and the proof is complete. \(\square \)
The first and second diagrams in Fig. 1 (resp. in Fig. 2) depict the two cases of local saddle-node and transcritical bifurcations (resp. classical pitchfork bifurcation) described in detail in Theorem 3.1 when the Sacker and Sell spectrum is a point (the first one) and a band (the second one). The third diagram in Fig. 2 depicts the case of a generalized pitchfork bifurcation, which requires the Sacker and Sell spectrum to be a band (and hence never happens in the autonomous case, which is uniquely ergodic). Notice that we have examples of one, two, and three bifurcation points. In particular, the band case of local saddle-node and transcritical bifurcation diagram exhibits three of these values.
We complete the section by mentioning that there are simple autonomous examples of classical pitchfork bifurcation (as \(x'=-x^3+\lambda x\), with \(\lambda _\pm =0\) as bifurcation point) and local saddle-node and transcritical bifurcation (as \(x'=-x^3\pm 2x^2+\lambda x\), with \(\lambda _0=-1\) as local saddle-node bifurcation point and \(\lambda _\pm =0\) as local classical transcritical bifurcation point; the two signs of the second-order term correspond to the two possible sings for the curve \(\kappa _\lambda \) of nonhyperbolic critical points). We will go deeper in this matter in Sects. 4, 5 and 6, where we will show that all the possibilities realize for suitable families (3.1).
4 Criteria for Cubic Polynomial Equations
Let us consider families of cubic polynomial ordinary differential equations
where \(a_i\in C(\Omega )\) for \(i\in \{1,2,3\}\), \(a_3\) is strictly positive and \(\lambda \in {\mathbb {R}}\). It is clear that the function \(f(\omega ,x)=-a_3(\omega )x^3+a_2(\omega )x^2+a_1(\omega )x\) is (Co). In addition, f is \(\mathrm {(SDC)}_*\) (see Sect. 2.6). Then, Theorem 3.1 describes the three possible \(\lambda \)-bifurcation diagrams for (4.1). Our first goal in this section, achieved in Sects. 4.1 and 4.2, is to describe conditions on the coefficients \(a_i\) determining the specific diagram. The last subsection is devoted to explain how to get actual patterns satisfying the previously established conditions.
As in Sect. 3, \(\tau _\lambda (t,\omega ,x_0)=(\omega {\cdot }t,u_\lambda (t,\omega ,x_0))\) repesents the local skewproduct flow induced by (4.1)\(_\lambda \) on \(\Omega \times {\mathbb {R}}\). Notice that the Sacker and Sell spectrum of \(f_x\) on \({\mathcal {M}}_0=\Omega \times \{0\}\) (which is \(\tau _\lambda \)-minimal for all \(\lambda \in {\mathbb {R}}\)) coincides with \(\textrm{sp}(a_1)\).
4.1 The Case of \(a_1\) with Continuous Primitive
Throughout this subsection, we assume that \(a_1\in CP(\Omega )\). Since \(CP(\Omega )\subseteq C_0(\Omega )\) (see Sect. 2.2), the Sacker and Sell spectrum of \(a_1\) is \(\textrm{sp}(a_1)=\{0\}\). Hence, the bifurcation diagram of (4.1) fits in (i) or (ii) of Theorem 3.1, and our objective is to give criteria ensuring each one of these two possibilities. The relevant fact in terms of which the criteria will be constructed is that the number of \(\tau _0\)-minimal sets distinguishes the type of bifurcation: there is either one \(\tau _0\)-minimal set in (ii) or two \(\tau _0\)-minimal sets in (i).
Proposition 4.2 provides a simple classification for (4.1) in this case. It is based on the previous bifurcation analysis of
made in Proposition 4.1. These two results extend Proposition 6.6 and Corollary 6.7 of [11] to the case of strictly positive \(a_3\) (instead of \(a_3\equiv 1\)), since the case of \(a_1\equiv 0\) is trivially covered by Proposition 4.2 with \(b\equiv 0\). We will call \({\check{\tau }}_\xi \) the local skewproduct flow induced by (4.2)\(_\xi \) on \(\Omega \times {\mathbb {R}}\).
Proposition 4.1
The \({\check{\tau }}_\xi \)-minimal set \({\mathcal {M}}_0=\Omega \times \{0\}\) is nonhyperbolic for all \(\xi \in {\mathbb {R}}\). In addition, if \(\textrm{sp}(a_2)=[-\xi _+,-\xi _-]\), with \(\xi _-\le \xi _+\), then
-
(i)
\({\check{\tau }}_\xi \) admits exactly two minimal sets \({\mathcal {M}}_\xi ^l<{\mathcal {M}}_0\) respectively given by the graphs of \(\alpha _\xi \) and 0 for \(\xi <\xi _-\), where \({\mathcal {M}}_\xi ^l\) is hyperbolic attractive; and \(\alpha _\xi \) collides with 0 on a residual \(\sigma \)-invariant set as \(\xi \uparrow \xi _-\);
-
(ii)
\({\mathcal {M}}_0\) is the unique \({\check{\tau }}_\xi \)-minimal set for \(\xi \in [\xi _-,\xi _+]\);
-
(iii)
\({\check{\tau }}_\xi \) admits exactly two minimal sets \({\mathcal {M}}_0<{\mathcal {M}}_\xi ^u\) respectively given by the graphs of 0 and \(\beta _\xi \) for \(\xi >\xi _+\), where \({\mathcal {M}}_\xi ^u\) is hyperbolic attractive; and \(\beta _\xi \) collides with 0 on a residual \(\sigma \)-invariant set as \(\xi \downarrow \xi _+\).
Proof
The proof follows step by step that of Proposition 6.6 of [11]. The only remarkable differences arise in checking the existence of a bounded solution of (4.2)\(_\xi \) for \(\xi >\xi _+\) which is bounded away from 0 for \(t>0\). Let us explain these differences. Take \(\alpha \in (0,\xi -\xi _+)\) with \(\alpha <\sqrt{2r}\) for \(r=\Vert a_3\Vert =\max _{\omega \in \Omega } a_3(\omega )>0\). Let us check that the solution w(t) of \(w'=-(a_2(\omega {\cdot }t)+\xi )+a_3(\omega {\cdot }t)/w\) with \(w(0)=\alpha <2r/\alpha \) is bounded on \([0,\infty )\). We define \(t_1=\sup \{t>0:\, w(s)\le 2r/\alpha +lt_\alpha \) for all \(s\in [0,t]\}\), where \(l=r/\alpha +\Vert a_2+\xi \Vert \) and \(t_\alpha >0\) satisfies \(\int _0^{t_\alpha } (a_2(\omega {\cdot }s)+\xi )\, ds\ge \alpha t_\alpha \) for all \(\omega \in \Omega \). The existence of such \(t_\alpha \) is proved in the proof of Proposition 6.6 of [11]. We assume for contradiction that \(t_1<\infty \) and define \(t_0=\inf \{t<t_1:\, w(s)\ge 2r/\alpha \) for all \(s\in [t,t_1]\}\). Then, \(t_0<t_1-t_\alpha \): otherwise
which is not the case. In particular, \(w(t)\ge 2r/\alpha \) for \(t\in [t_1-t_\alpha ,t_1]\), and hence
which contradicts the definition of \(t_1\). \(\square \)
Proposition 4.2
Let b be a continuous primitive of \(a_1\). Then,
-
(i)
\(\textrm{sp}(e^ba_2)\subset (0,\infty )\) if and only if (4.1) exhibits the local saddle-node and classical transcritical bifurcations of minimal sets described in Theorem 3.1(i), with \(\alpha _\lambda \) colliding with 0 on a residual \(\sigma \)-invariant set as \(\lambda \downarrow \lambda _+\). In particular, this situation holds if \(0\not \equiv a_2\ge 0\).
-
(ii)
\(\textrm{sp}(e^ba_2)\subset (-\infty ,0)\) if and only if (4.1) exhibits the local saddle-node and classical transcritical bifurcations of minimal sets described in Theorem 3.1(i), with \(\beta _\lambda \) colliding with 0 on a residual \(\sigma \)-invariant set as \(\lambda \downarrow \lambda _+\). In particular, this situation holds if \(0\not \equiv a_2\le 0\).
-
(iii)
\(0\in \textrm{sp}(e^ba_2)\) if and only if (4.1) exhibits the classical pitchfork bifurcation of minimal sets described in Theorem 3.1(ii).
Proof
The family of changes of variable \(y(t)=e^{-b(\omega {\cdot }t)}x(t)\) takes (4.1) to
The possibilities for (4.1) follow from here, since \({\mathcal {N}}\) is a minimal set for (4.3)\(_\lambda \) if and only if \({\mathcal {M}}=\{(\omega ,e^{b(\omega )}x):\,(\omega ,x)\in {\mathcal {N}}\}\) is minimal for (4.1)\(_\lambda \). The rest of the proof adapts that of Corollary 6.7 of [11]. Theorem 3.1 applied to \(f(\omega ,y)=-e^{2b(\omega {\cdot }t)}y^3+e^{b(\omega {\cdot }t)}a_2(\omega {\cdot }t)y^2\) shows that \(\lambda _-=\lambda _+=0\) is a bifurcation point for (4.3), and that the corresponding bifurcation diagram is that described in its points (i) or (ii). According to Proposition 4.1, the flow induced by \(y'=f(\omega {\cdot }t,y)\), that is, (4.3)\(_0\), admits just one minimal set if and only if \(0\in \textrm{sp}(e^ba_2)\); two minimal sets, being \({\mathcal {M}}_0=\Omega \times \{0\}\) the lower one, if and only if \(\textrm{sp}(e^ba_2)\subset (0,\infty )\); and two minimal sets, being \({\mathcal {M}}_0\) the upper one, if and only if \(\textrm{sp}(e^ba_2)\subset (-\infty ,0)\). As said before, this determines the global bifurcation diagram. The last assertions in (i) and (ii) are trivial. \(\square \)
As a consequence of the previous result, given any strictly positive \(a_3\) and any changing-sign \(a_2\), we are able to construct \(a_1\) with bounded primitive in such a way that (4.1) exhibits the classical pitchfork bifurcation of minimal sets described in Theorem 3.1(ii).
Proposition 4.3
Let \(a_2\in C(\Omega )\) change sign. Then, there exists \(a_1\in CP(\Omega )\) such that (4.1) exhibits the classical pitchfork bifurcation described in Theorem 3.1(ii).
Proof
Let \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) be arbitrarily fixed. We define the nonempty open sets \(\Gamma _1=\{\omega \in \Omega :\, a_2(\omega )>0\}\) and \(\Gamma _2=\{\omega \in \Omega :\, a_2(\omega )<0\}\). As \((\Omega ,\sigma )\) is minimal, \(\textrm{supp}(m)=\Omega \), so \(m(\Gamma _1)>0\) and \(m(\Gamma _2)>0\). A suitable application of Urysohn’s Lemma provides nonnegative and not identically zero continuous functions \(c_1,c_2:\Omega \rightarrow {\mathbb {R}}\) such that \(\textrm{supp}(c_1)\subseteq \Gamma _1\) and \(\textrm{supp}(c_2)\subseteq \Gamma _2\). Then, \(\int _\Omega c_1(\omega )a_2(\omega )\, dm>0\) and \(\int _\Omega c_2(\omega )a_2(\omega )\, dm<0\), so there exists \(\epsilon >0\) such that \(\int _\Omega (c_1(\omega )+\epsilon )a_2(\omega )\, dm>0\) and \(\int _\Omega (c_2(\omega )+\epsilon )a_2(\omega )\, dm<0\). The density of \(C^1(\Omega )\) on \(C(\Omega )\) and the strict positiveness of \(c_1+\epsilon \) and \(c_2+\epsilon \) ensure the existence of strictly positive functions \({{\hat{c}}}_1,{{\hat{c}}}_2\in C^1(\Omega )\) such that \(\int _\Omega {{\hat{c}}}_1(\omega )a_2(\omega )\, dm>0\) and \(\int _\Omega {{\hat{c}}}_2(\omega )a_2(\omega )\, dm<0\). Therefore, there exists \(s\in (0,1)\) such that \(\int _\Omega (s{{\hat{c}}}_1(\omega )+(1-s){{\hat{c}}}_2(\omega ))a_2(\omega )\, dm=0\). Since \(s{{\hat{c}}}_1(\omega )+(1-s){{\hat{c}}}_2(\omega )\) is strictly positive, \(b(\omega )=\log (s{{\hat{c}}}_1(\omega )+(1-s){{\hat{c}}}_2(\omega ))\) is well defined and \(b\in C^1(\Omega )\). So, \(\int _\Omega e^{b(\omega )}a_2(\omega )\, dm=0\), and hence \(0\in \textrm{sp}(e^ba_2)\) (see Sect. 2.5). We take \(a_1=b'\) and apply Proposition 4.2 to complete the proof. \(\square \)
4.2 The Case of Sign-Preserving \(a_2\)
In what follows, we will describe some conditions ensuring which one of the bifurcation possibilities of minimal sets described in Theorem 3.1 holds for (4.1). Our starting point are the functions \(a_1,a_3\), with \(a_3\) strictly positive. Let \(\textrm{sp}(a_1)=[-\lambda _+,-\lambda _-]\), with \(\lambda _-\le \lambda _+\), be the Sacker and Sell spectrum of \(a_1\), let \(k_1<k_2\) be such that \(k_1\le a_1(\omega )\le k_2\) for all \(\omega \in \Omega \), and let \(0<r_1\le r_2\) be such that \(r_1\le a_3(\omega )\le r_2\) for all \(\omega \in \Omega \). Since \(\textrm{sp}(a_1)\subseteq [k_1,k_2]\) (see Sect. 2.5), \(\lambda _-+k_1\le \lambda _++k_1\le 0\le \lambda _-+k_2\le \lambda _++k_2\), and the first and last inequalities are strict if \(a_1\) has band spectrum. Our goal is to relate the “size" of \(a_2\) to these six constants in order to get the different diagrams. A remarkable fact is that, in the cases studied this subsection, \(a_2\) never changes sign, in contrast with the situation of Proposition 4.3 and those analyzed at the end of Sect. 6.
Now, we recall and complete the statement of Proposition 6.5 of [11] when applied to our current model (4.1), which gives a sufficient criterium for the classical pitchfork bifurcation.
Proposition 4.4
-
(i)
(A criterium ensuring classical pitchfork bifurcation). If \(a_2(\omega )=0\) for all \(\omega \in \Omega \), then (4.1) exhibits the classical pitchfork bifurcation of minimal sets described in Theorem 3.1(ii).
-
(ii)
If \(a_2(\omega )\ge 0\) (resp. \(a_2(\omega )\le 0\)) for all \(\omega \in \Omega \), then \(\alpha _\lambda \) (resp. \(\beta _\lambda \)) takes the value 0 at its continuity points for all \(\lambda \le \lambda _+\).
Proof
Proposition 6.5 of [11] ensures (i) and (ii) for \(\lambda <\lambda _+\). To check (ii) for \(\lambda _+\), it suffices to observe that all the alternatives of Theorem 3.1 in which \(\alpha _\lambda \) (resp. \(\beta _\lambda \)) takes the value 0 at its continuity points for all \(\lambda <\lambda _+\), also \(\alpha _{\lambda _+}\) (resp. \(\beta _{\lambda _+}\)) takes the value 0 at its continuity points. \(\square \)
The main results of this subsection are stated in Propositions 4.7, 4.8 and 4.9, whose proofs use the next technical results. The first one shows that one of the conditions required in Proposition 4.7 always holds if \(a_1\) has band spectrum (in which case \(a_1\) is not a constant function).
Lemma 4.5
Let \(a\in C(\Omega )\). Then, the next three assertions are equivalent: a is nonconstant; \(\min _{\omega \in \Omega }a(\omega )<\inf \textrm{sp}(a)\); \(\max _{\omega \in \Omega }a(\omega )>\sup \textrm{sp}(a)\).
Proof
Clearly a is nonconstant if \(\min _{\omega \in \Omega }a(\omega )<\inf \textrm{sp}(a)\). Now, we assume that a is nonconstant and take \(0<\epsilon <\max _{\omega \in \Omega } a(\omega )-\min _{\omega \in \Omega }a(\omega )\). We define the nonempty open set \(U_1=\{\omega \in \Omega :\, a(\omega )>\min _{\omega \in \Omega } a(\omega )+\epsilon \}\), and note that \(m(U_1)>0\) for all \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\), since \(\Omega \) is minimal. Let \(m_1\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) satisfy \(\inf \textrm{sp}(a)=\int _\Omega a(\omega )\, dm_1\) (see Sect. 2.5). Then,
This completes the proof of the equivalence of the two first assertions. To check the equivalence of the first and the third ones, we work with \(U_2=\{\omega \in \Omega :\, a(\omega )<\max _{\omega \in \Omega } a(\omega )-\epsilon \}\). \(\square \)
Lemma 4.6
Let \(\lambda +k_1<0\).
-
(i)
If \(a_2(\omega )>2\sqrt{r_2(-\lambda -k_1)}\) for all \(\omega \in \Omega \), then \(\rho _1=\sqrt{(-\lambda -k_1)/r_2}\) is a global strict lower solution of (4.1)\(_\lambda \). Consequently, \(\tau _\lambda \) admits a minimal set \({\mathcal {M}}_\lambda ^u>{\mathcal {M}}_0\).
-
(ii)
If \(a_2(\omega )<-2\sqrt{r_2(-\lambda -k_1)}\) for all \(\omega \in \Omega \), then \(-\rho _1\) is a global strict upper solution of (4.1)\(_\lambda \). Consequently, \(\tau _\lambda \) admits a minimal set \({\mathcal {M}}_\lambda ^l<{\mathcal {M}}_0\).
Proof
Let us prove (i). We define \(g(\rho )=r_2\rho -(\lambda +k_1)/\rho \). Then, \(g(\rho _1)=2\sqrt{r_2(-\lambda -k_1)}\), and
for all \(\omega \in \Omega \), which proves the first assertion. In turn, this property ensures that \(\rho _1<\beta _\lambda \) (see Sect. 2.4), which proves the second assertion. The proof of (ii) is analogous. \(\square \)
Proposition 4.7
-
(i)
(A criterium ensuring saddle-node and transcritical bifurcations). If \(k_1<-\lambda _+\) and
$$\begin{aligned} a_2(\omega )>2\sqrt{r_2(-\lambda _--k_1)}\qquad (\text {resp.}\;\;a_2(\omega )<-2\sqrt{r_2(-\lambda _--k_1)}\,) \end{aligned}$$for all \(\omega \in \Omega \), then (4.1) exhibits the local saddle-node and transcritical bifurcations of minimal sets described in Theorem \(\mathrm {3.1(i)}\), with \(\alpha _\lambda \) (resp. \(\beta _\lambda \)) colliding with 0 on a residual \(\sigma \)-invariant set as \(\lambda \downarrow \lambda _+\).
-
(ii)
(A criterium precluding classical pitchfork bifurcation). If \(k_1<-\lambda _+\) and
$$\begin{aligned} a_2(\omega )>2\sqrt{r_2(-\lambda _+-k_1)}\qquad (resp.\;\;a_2(\omega )<-2\sqrt{r_2(-\lambda _+-k_1)}\,) \end{aligned}$$for all \(\omega \in \Omega \), then (4.1) does not exhibit the classical pitchfork bifurcation of minimal sets described in Theorem \(\mathrm {3.1(ii)}\).
Proof
-
(i)
Note that if \(k_1<-\lambda _+\), then \(-\lambda _--k_1\ge -\lambda _+-k_1>0\). There exists \(\delta >0\) such that \(a_2(\omega )>2\sqrt{r_2(-\lambda _-+\delta -k_1)}\) (resp. \(a_2(\omega )<-2\sqrt{r_2(-\lambda _-+\delta -k_1)}\)) for all \(\omega \in \Omega \). Hence, Lemma 4.6 ensures the existence of a \(\tau _{\lambda _--\delta }\)-minimal set \({\mathcal {M}}_{\lambda _--\delta }^u>{\mathcal {M}}_0\) (resp. \({\mathcal {M}}_{\lambda _--\delta }^l<{\mathcal {M}}_0\)), and this situation only arises in the stated case of Theorem 3.1(i).
-
(ii)
The existence of a \(\tau _{\lambda _+}\)-minimal set \({\mathcal {M}}_{\lambda _+}^u>{\mathcal {M}}_0\) (resp. \({\mathcal {M}}_{\lambda _+}^l<{\mathcal {M}}_0\)), ensured by Lemma 4.6, precludes the situation of Theorem 3.1(ii).
\(\square \)
Recall that \(\lambda _+<k_2\) if \(a_1\) has band spectrum: see Lemma 4.5. The following two results refer to the case that \(a_1\) has band spectrum: \(\lambda _-<\lambda _+\). (This is ensured in Proposition 4.9 by its condition (4.4)).
Proposition 4.8
(A criterium ensuring pitchfork bifurcation) If \(\lambda _-<\lambda _+\) and
for all \(\omega \in \Omega \), then (4.1) does not exhibit the saddle-node and transcritical bifurcations of minimal sets described in Theorem 3.1(i).
Proof
We reason in the case of positive \(a_2\). Let \({{\hat{\beta }}}_\lambda \) be the upper delimiter equilibrium of the global attractor of the skewproduct flow induced by \(x'=-a_3(\omega {\cdot }t)x^3+(a_1(\omega {\cdot }t)+\lambda )x\), so that \({{\hat{\beta }}}_\lambda :\Omega \rightarrow {\mathbb {R}}\) is a strictly positive continuous map if \(\lambda >\lambda _+\) (see Proposition 4.4(i)). Note that, if \(\lambda +k_2\ge 0\) and \(\rho >\sqrt{(\lambda +k_2)/r_1}\), then
that is, \(\omega \mapsto \rho \) is a global strict upper solution of \(x'=-a_3(\omega {\cdot }t)x^3+(a_1(\omega {\cdot }t)+\lambda )x\). Hence, if \(\lambda >\lambda _+\), for any \(\omega \in \Omega \), then the \(\varvec{\upomega }\)-limit set of \((\omega ,\rho )\) contains a minimal set \({\mathcal {M}}^u\) which is below of the graph of \(\rho \) (see Sect. 2.3), and which cannot be \({\mathcal {M}}_0\), since \({\mathcal {M}}_0\) is repulsive for \(\tau _\lambda \). Hence, \({\mathcal {M}}^u\) is the graph of \({{\hat{\beta }}}_\lambda \), which ensures that \({{\hat{\beta }}}_\lambda (\omega )\le \rho \) for all \(\omega \in \Omega \). It follows easily that \({{\hat{\beta }}}_\lambda (\omega )\le \sqrt{(\lambda +k_2)/r_1}\) for all \(\omega \in \Omega \).
We take \(\delta >0\) such that, if \(\lambda \in [\lambda _+,\lambda _++\delta ]\), then \(a_2(\omega )\le \sqrt{r_1}\,(\lambda _+-\lambda _-)/\sqrt{\lambda +k_2}\) for all \(\omega \in \Omega \). Then, if \(\lambda \in (\lambda _+,\lambda _++\delta ]\),
for all \(\omega \in \Omega \), and hence
for all \(\omega \in \Omega \): \({{\hat{\beta }}}_\lambda \) is a global strict upper \(\tau _{\lambda _-}\)-solution, and, in particular, a continuous strong \(\tau _{\lambda _-}\)-superequilibrium. In addition, Proposition 4.4(i) ensures that \({{\hat{\beta }}}_{\lambda _+}=\lim _{\lambda \downarrow \lambda _+}{{\hat{\beta }}}_\lambda \) collides with 0 on a residual set of points \({\mathcal {R}}_1\).
Let us assume for contradiction that the situation for (4.1) is that described in Theorem 3.1(i). It follows from Proposition 4.4(ii) that \(\alpha _\lambda \) collides with 0 on a residual set of points as \(\lambda \downarrow \lambda _+\), so Theorem 3.1(i) ensures that \(\beta _{\lambda _-}\) is a continuous strictly positive \(\tau _{\lambda _-}\)-equilibrium whose graph is the attractive hyperbolic \(\tau _{\lambda _-}\)-minimal set \({\mathcal {M}}^u_{\lambda _-}\). Since the Sacker and Sell spectrum of \({\mathcal {M}}_0\) for \(\tau _{\lambda _-}\) is the nondegenerate interval \([-\lambda _++\lambda _-,0]\), there exists a measure m such that \(\int _\Omega (f_x(\omega ,0)+\lambda _-)\, dm<0\) (see Sect. 2.5), and hence Lemma 3.2 ensures that the lower delimiter \(\kappa _{\lambda _-}^2\) of the basin of attraction of \(\beta _{\lambda _-}\) vanishes on its residual set of continuity points \({\mathcal {R}}_2\). Let us take \(\omega _0\in {\mathcal {R}}_1\cap {\mathcal {R}}_2\), a sequence \(\{t_n\}\uparrow \infty \) such that \(\lim _{n\rightarrow \infty }\omega _0{\cdot }t_n=\omega _0\) and \(\lambda \in (\lambda _+,\lambda _++\delta ]\) such that \(\kappa _{\lambda _-}^2(\omega _0)=0<{{\hat{\beta }}}_\lambda (\omega _0)<\beta _{\lambda _-}(\omega _0)\), which guarantees that \(\lim _{n\rightarrow \infty }(u_{\lambda _-}(t_n,\omega _0,{{\hat{\beta }}}_\lambda (\omega _0))-\beta _{\lambda _-}(\omega _0{\cdot }t_n))=0\). Since \({{\hat{\beta }}}_\lambda \) is a continuous strong \(\tau _{\lambda _-}\)-superequilibrium, there exist \(t_0>0\) and \(e_0>0\) such that \(u_{\lambda _-}(t,\omega _0,{{\hat{\beta }}}_\lambda (\omega _0))+e\le {{\hat{\beta }}}_\lambda (\omega _0{\cdot }t)\) for all \(t\ge t_0\), and hence \((u_{\lambda _-}(t_n,\omega _0,{{\hat{\beta }}}_\lambda (\omega _0))-\beta _{\lambda _-}(\omega _0{\cdot }t_n))+\beta _{\lambda _-}(\omega _0{\cdot }t_n)+e\le {{\hat{\beta }}}_\lambda (\omega _0{\cdot }t_n)\) for n large enough. Taking limits as \(n\rightarrow \infty \) we obtain \(\beta _{\lambda _-}(\omega _0)+e\le {{\hat{\beta }}}_\lambda (\omega _0)\), a contradiction. This completes the proof. \(\square \)
Proposition 4.9
(A criterium ensuring generalized pitchfork bifurcation) If
and
for all \(\omega \in \Omega \), then (4.1)\(_\lambda \) exhibits the generalized pitchfork bifurcation of minimal sets described in Theorem 3.1(iii), with \(\alpha _\lambda \) (resp. \(\beta _\lambda \)) colliding with 0 on a residual \(\sigma \)-invariant set as \(\lambda \downarrow \lambda _+\).
Proof
Condition (4.4) ensures that \(a_1\) has band spectrum and that the intervals in which \(a_2\) can take values are nondegenerate. Propositions 4.8 and 4.7(ii) respectively preclude situations (i) and (ii) of Theorem 3.1, and Proposition 4.4(ii) ensures the stated collision property for \(\alpha _\lambda \) (resp. for \(\beta _\lambda \)). \(\square \)
4.3 Cases of Generalized Pitchfork Bifurcation
As said after Theorem 3.1, there are autonomous cases presenting either the local saddle-node and classical transcritical bifurcations or the classical pitchfork bifurcation of minimal sets described in cases (i) and (ii) of that theorem. These two possibilities are also the unique ones in nonautonomous examples when \(a_1\) has point spectrum, and we have classified them if \(a_1\in CP(\Omega )\) in Sect. 4.1, where in addition we have shown simple ways to construct examples fitting in each one of these two situations. In Sect. 4.2, we have observed that cases (i) (with a local nonclassical transcritical bifurcation) and (ii) of Theorem 3.1 can also occur when \(a_1\) has band spectrum. In addition, Propositions 4.4(i) and 4.7(i) provide simple ways to construct such examples by choosing a suitable \(a_2\) once fixed \(a_1\) and \(a_3\). In the same line, Proposition 4.9 establishes conditions ensuring the generalized pitchfork case of Theorem 3.1(iii). But the existence of polynomials satisfying these last conditions is not so obvious.
Therefore, our next objective is to develop systematic ways of constructing third degree polynomials giving rise to families (4.1) for which the bifurcation diagram is that of Theorem 3.1(iii). Hence, all the situations described in that theorem actually realize.
Lemma 4.10
Let \(m_1,\dots ,m_n\) be different elements of \({\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) with \(n\ge 1\), and let \(0<\epsilon <1\) be fixed. For every \(i\in \{1,\dots ,n\}\), there exists a continuous function \(c_i:\Omega \rightarrow [0,1]\) with \(\min _{\omega \in \Omega }c_i(\omega )=0\) and \(\max _{\omega \in \Omega }c_i(\omega )=1\) such that, if \(i,j\in \{1,\dots ,n\}\) and \(j\ne i\), then \(c_i\cdot c_j\equiv 0\) and
Proof
Let \(\epsilon >0\) be fixed. As explained in Remark 1.10 of [15] and Sect. 6 of Chapter II of [22], there exist disjoint \(\sigma \)-invariant sets \(\Omega _1,\dots ,\Omega _n\subseteq \Omega \) such that \(m_i(\Omega _j)=\delta _{ij}\) for \(i,j\in \{1,\dots ,n\}\), where \(\delta _{ij}\) is the Kronecker delta: just take \(\Omega _i\) as the so-called ergodic component of \(m_i\). We take compact sets \(K_i\subseteq \Omega _i\) such that \(m_i(K_i)>1-\epsilon \) for \(i\in \{1,\dots ,n\}\). Let \(d=\min _{1\le i<j\le n}d(K_i,K_j)\) and let \(U_i\) be an open set such that \(K_i\subset U_i\subseteq B(K_i,d/3)\), \(m_i(U_i{\setminus } K_i)<\epsilon \) and \(m_j(U_i)=m_j(U_i\setminus K_i)<\epsilon \) for \(i,j\in \{1,\dots ,n\}\) with \(i\ne j\). The choice of d ensures that \(U_1,\ldots ,U_n\) are pairwise disjoint. Finally, Urysohn’s Lemma provides continuous functions \(c_i:\Omega \rightarrow [0,1]\) with \(c_i(\omega )=1\) for all \(\omega \in K_i\) and \(c_i(\omega )=0\) for all \(\omega \notin U_i\), for \(i\in \{1,\dots ,n\}\). All the statements follow easily. \(\square \)
Proposition 4.11
Let \(m_1,\dots ,m_n\) be different elements of \({\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) with \(n\ge 2\). Take \(r\ge 1\) and \(\epsilon >0\) with
(so that \(0<\epsilon <1/n\)). Let \(c_1\ldots ,c_n:\Omega \rightarrow {\mathbb {R}}\) be the functions given by Lemma 4.10 for \(m_1,\ldots ,m_n\) and \(\epsilon \). Take constants \(\alpha _1\le \alpha _2\le \dots \le \alpha _n\) with \(\alpha _1<0\) and \(\alpha _n>0\), and define \(a_1=\sum _{i=1}^n \alpha _i c_i\), so that \(\alpha _1\le a_1(\omega )\le \alpha _2\) for all \(\omega \in \Omega \). Then, \(a_1\) has band spectrum \(\textrm{sp}(a_1)=[-\lambda _+,-\lambda _-]\subset (\alpha _1,\alpha _2)\) and
Consequently, if \(a_3\) takes values in \([r_1,r_2]\) for \(r_1>0\) and \(r_2=rr_1\), and if \(a_2\) satisfies (4.5) for \(k_1=\alpha _1\) and \(k_2=\alpha _n\), then (4.1) exhibits the generalized pitchfork bifurcation of minimal sets described in Theorem 3.1(iii).
Proof
It is easy to check that \(0<\epsilon _1<1/n\). In addition, according to Lemma 4.10,
These inequalities ensure that \(\alpha _1\le -\lambda _+<\alpha _1(1-\epsilon )+(n-1)\alpha _n\epsilon \) and \(\alpha _n(1-\epsilon )+(n-1)\alpha _1\epsilon <-\lambda _-\le \alpha _n\). Then, \(\lambda _+-\lambda _->(1-n\epsilon )(\alpha _n-\alpha _1)>0\) (which shows the nondegeneracy of \(\textrm{sp}(a_1)\)), \(0>\lambda _++\alpha _1>\epsilon (\alpha _1-(n-1)\alpha _n)\) and \(0<\lambda _++\alpha _n\le \alpha _n-\alpha _1\), which in turn yield
So, it is enough to check that the right-hand side is strictly positive; that is,
Since \((1-n\epsilon )^2-4\epsilon r (n-1)\le (1-n\epsilon )^2-4\epsilon r\) and \(\alpha _1<0<\alpha _n\), it suffices to check that \((1-n\epsilon )^2-4r\epsilon (n-1)>0\). That is, \(n^2\epsilon ^2-2(n+2r(n-1))\epsilon +1>0\). And this follows from \(\epsilon <\epsilon _1\), since \(\epsilon _1\) is the lowest root of the polynomial.
Since \(\alpha _1=\min _{\omega \in \Omega } a_1(\omega )\) and \(\alpha _n=\max _{\omega \in \Omega }a_1(\omega )\), Lemma 4.5 ensures that \([-\lambda _+,-\lambda _-]\subset (\alpha _1,\alpha _2)\). Finally, note that all the hypotheses of Proposition 4.9 are fulfilled with \(k_1=\alpha _1\) and \(k_2=\alpha _n\). This proves the last assertion. \(\square \)
Note that every function \(a_1\) constructed by the procedure of Proposition 4.11 takes positive and negative values. But this is not a real restriction to get a generalized pitchfork bifurcation diagram, since that corresponding to \(a_1+\mu \) for any constant \(\mu \in {\mathbb {R}}\) is of the same type.
Proposition 4.11 shows that the occurrence of families (4.1) with generalized pitchfork bifurcation diagram only requires the existence of two different ergodic measures. The functions \(a_1\) constructed as there indicated are intended to satisfy (4.4); that is, their extremal Lyapunov exponents are near its maximum and minimum. But in fact this is not a necessary condition for a function \(a_1\) to be the first order coefficient of a polynomial giving rise to a generalized pitchfork bifurcation. Theorem 4.14 proves this assertion in the case of a finitely ergodic base flow. Its proof in based on Proposition 4.12 and Corollary 4.13.
Proposition 4.12
Assume that \({\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )=\{m_1,\ldots ,m_n\}\) with \(n\ge 1\). There exists \(\epsilon _2>0\) such that, if \(0<\epsilon \le \epsilon _2\) and \(c_1,\ldots ,c_n:\Omega \rightarrow {\mathbb {R}}\) are the functions constructed in Lemma 4.10 for \(m_1,\ldots ,m_n\) and \(\epsilon \), then
as topological sum of vector spaces, where \(C(\Omega )\) is endowed with the uniform topology, given by \(\Vert a\Vert =\max _{\omega \in \Omega } |a(\omega )|\). In particular, the Sacker and Sell spectrum of \(a\in C(\Omega )\) coincides with that of its projection onto \(\langle c_1,\dots ,c_n\rangle \).
Proof
Let \(M_{n\times n}({\mathbb {R}})\) be the linear space of \(n\times n\) real matrices, which we endow with the norm \(\Vert C\Vert _\infty =\max _{1\le i,j\le n}|c_{ij}|\), where \(C=\{c_{ij}\}_{1\le i,j\le n}\). The set of regular \(n\times n\) real matrices \(GL_n({\mathbb {R}})\) is an open subset of \(M_{n\times n}({\mathbb {R}})\), and the identity matrix I belongs to \(GL_n({\mathbb {R}})\). Hence, there exists \(\epsilon _2\in (0,1)\) such that, if \(\Vert C-I\Vert _\infty \le \epsilon _2\), then C is regular. Therefore, if \(\epsilon \in (0,\epsilon _2]\), then the corresponding functions \(c_1,\ldots ,c_n\) of Lemma 4.10 provide a regular matrix
Let us consider the continuous linear functionals \(T_i:C(\Omega )\rightarrow {\mathbb {R}}\), \(f\mapsto \int _\Omega f(\omega )\, dm_i\) for \(i\in \{1,\dots ,n\}\), and note that \(\textrm{Ker}(T_i)\) has codimension 1. Therefore, the codimension of the set \(C_0(\Omega )\), which coincides with \(\bigcap _{i\in \{1,\dots ,n\}}\textrm{Ker}(T_i)\), is at most n. In addition, the linear space \(\langle c_1,\dots ,c_n\rangle \) has dimension n, since the supports of \(c_1,\ldots ,c_n\) are pairwise disjoint. Let us check that \(\langle c_1,\dots ,c_n\rangle \cap C_0(\Omega )=\{0\}\): if \(c=\sum _{i=1}^n \alpha _i c_i\in C_0(\Omega )\), then \(0=\int _\Omega c(\omega )\, dm_j=\sum _{i=1}^n \alpha _i\int _\Omega c_i(\omega )\, dm_j\) for every \(j\in \{1,\dots ,n\}\). These n equations provide a homogeneous linear system for \(\alpha _1,\ldots ,\alpha _n\) with regular coefficient matrix C; so \(\alpha _1=\cdots =\alpha _n=0\) and hence \(c=0\). Consequently, \(C(\Omega )\) is the algebraic direct sum of \(\langle c_1,\dots ,c_n\rangle \) and \(C_0(\Omega )\). We will check that the projections of \(C(\Omega )\) onto each one of the subspaces are continuous, which will complete the proof of the first assertion. Given \(a\in C(\Omega )\), its projection \(P_{\langle c_1,\dots ,c_n\rangle }a=\sum _{i=1}^n \alpha _i c_i\) onto \(\langle c_1,\ldots ,c_n\rangle \) is given by
Therefore, \(\Vert \alpha _i c_i\Vert =|\alpha _i|\le n \Vert C^{-1}\Vert _{\infty } \Vert a\Vert \) for every \(i\in \{1,\dots ,n\}\), and hence \(\Vert P_{\langle c_1,\dots ,c_n\rangle }a\Vert =\Vert \sum _{i=1}^n\alpha _i c_i\Vert \le n^2 \Vert C^{-1}\Vert _\infty \Vert a\Vert \). So, \(P_{\langle c_1,\dots ,c_n\rangle }:C(\Omega )\rightarrow \langle c_1,\ldots ,c_n\rangle \) is continuous. Finally, as \(P_{C_0(\Omega )}a=a-P_{\langle c_1,\dots ,c_n\rangle }a\), also the projection \(P_{C_0(\Omega )}\) is continuous, as asserted. The second assertion is an easy consequence of the first one. \(\square \)
Corollary 4.13
Assume that \({\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )=\{m_1,\ldots ,m_n\}\) with \(n\ge 2\), and take \(r\ge 1\). Let \(a_1\in C(\Omega )\) have Sacker and Sell spectrum \(sp(a_1)=[-\lambda _+,-\lambda _-]\) with \(\lambda _-<0<\lambda _+\). Then, there exist \({{\tilde{a}}}_1\in C(\Omega )\) with Sacker and Sell spectrum \(sp(\tilde{a}_1)=[-\lambda _+,-\lambda _-]\) and \(a_1-{{\tilde{a}}}_1\in C_0(\Omega )\), and \(k_1,k_2\in {\mathbb {R}}\) such that \(k_1\le {{\tilde{a}}}_1(\omega )\le k_2\) for all \(\omega \in \Omega \) and
Proof
We take \(\epsilon <\min (\epsilon _1,\epsilon _2)\), with \(\epsilon _1\) and \(\epsilon _2\) respectively provided by Propositions 4.11 and 4.12. Let \(c_1,\ldots ,c_n\) be the functions given by Lemma 4.10 for \(m_1,\ldots ,m_n\) and \(\epsilon \). Proposition 4.12 provides \(\alpha _1,\cdots ,\alpha _n\) such that the map \({{\tilde{a}}}_1=\alpha _1 c_1+\cdots +\alpha _nc_n\) satisfies \(\textrm{sp}({{\tilde{a}}}_1)=\textrm{sp}(a_1)\). Hence, since \(\lambda _-<0<\lambda _+\), \({{\tilde{a}}}_1\) takes positive and negative values, and therefore there exist \(i_1\) with \(\alpha _{i_1}<0\) and \(i_2\) with \(\alpha _{i_2}>0\). The result follows from Proposition 4.12 by reordering the measures \(m_1,\ldots ,m_n\). \(\square \)
Theorem 4.14
Assume that \({\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )=\{m_1,\ldots ,m_n\}\) with \(n\ge 2\). Let \(a_1\in C(\Omega )\) have Sacker and Sell spectrum \(\textrm{sp}(a_1)=[-\lambda _+,-\lambda _-]\) with \(\lambda _-<\lambda _+\). Then, there exist strictly positive functions \(a_2,a_3\in C(\Omega )\) such that (4.1) exhibits the generalized pitchfork bifurcation of minimal sets described in Theorem 3.1(iii).
Proof
We take any strictly positive \({{\tilde{a}}}_3\in C(\Omega )\) and \(0<r_1\le r_2\) with \(r_1\le {{\tilde{a}}}_3(\omega )\le r_2\) for all \(\omega \in \Omega \), and call \(r=r_2/r_1\). There is no loss of generality in assuming that \(\lambda _-<0<\lambda _+\), since the bifurcation diagrams for \(a_1\) and \(a_1+\mu \) coincide for any \(\mu \in {\mathbb {R}}\). We associate \({{\tilde{a}}}_1\) to \(a_1\) and r by Corollary 4.13. Note that there exists \(\delta _0>0\) such that, if \(|\lambda _+-\mu _+|<\delta _0\) and \(|\lambda _--\mu _-|<\delta _0\), then \(\mu _-<\mu _+\) and (4.8) holds for \(\mu _+,\mu _-\) instead of \(\lambda _+,\lambda _-\) and \(k_1+\delta _0,k_2-\delta _0\) instead of \(k_1,k_2\). That is, if \(c\in C(\Omega )\) satisfies \(|c(\omega )|<\delta _0\) for all \(\omega \in \Omega \), then \(\text {sp}({{\tilde{a}}}_1+c)=[-\mu _+,-\mu _-]\) with \(\mu _-<\mu _+\), \(k_1-\delta _0\le {{\tilde{a}}}_1(\omega )+c(\omega )\le k_2+\delta _0\) for all \(\omega \in \Omega \), and
Since \(CP(\Omega )\) is dense in \(C_0(\Omega )\) (see Sect. 2.2), there exists \(b\in C^1(\Omega )\) such that \(\max _{\omega \in \Omega }|a_1(\omega )-\tilde{a}_1(\omega )-b'(\omega )|<\delta _0\). We take \(c=a_1-{{\tilde{a}}}_1-b'\) and call \(\text {sp}({{\tilde{a}}}_1+c)=[-\mu _+,-\mu _-]\). Now, in order to apply Proposition 4.9, we take \(\tilde{a}_2\in C(\Omega )\) satisfying \(2\sqrt{r_2(\mu _+-k_1-\delta _0)}<\tilde{a}_2(\omega )<\sqrt{r_1}(\mu _+-\mu _-)/(\sqrt{(\mu _++k_2-\delta _0)})\) for all \(\omega \in \Omega \). Hence, the parametric family
presents a generalized pitchfork bifurcation of minimal sets. As explained in the proof of Proposition 4.2, the family of changes of variables \(y(t)=e^{b(\omega {\cdot }t)}x(t)\) takes (4.9) to
without changing the global structure of the bifurcation diagram. That is, the strictly positive functions \(a_3=e^{-2b}{{\tilde{a}}}_3\) and \(a_2=e^{-b}{{\tilde{a}}}_2\) fulfill the statement. \(\square \)
5 Criteria in a More General Framework
The ideas of Sects. 4.2 and 4.3 can be used to construct examples of all the three possible types of bifurcation diagrams described in Theorem 3.1 for families of differential equations of a more general type. Let us consider
where \(a_i\in C(\Omega )\) for \(i\in \{1,2,3\}\), \(a_3\) is strictly positive, \(h\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\), and \(h(\omega ,0)=0\) for all \(\omega \in \Omega \). Throughout the section, we will represent the Sacker and Sell spectrum of \(a_1\) as \(\text {sp}(a_1)=[-\lambda _+,-\lambda _-]\), with \(\lambda _-\le \lambda _+\). In addition, \(k_1\le k_2\) represent real constants satisfying \(k_1\le a_1(\omega )\le k_2\), and \(0<r_1\le r_2\) represent real constants satisfying \(r_1\le a_3(\omega )\le r_2\) for all \(\omega \in \Omega \).
In the line of part of the results of Sect. 4, we fix \(a_1\), \(a_3\) and h satisfying the mentioned hypotheses as well as a fundamental extra condition which relates the behavior of h for small values of x to the properties of \(a_1\) and \(a_3\), and such that the function
is \(\mathrm {(Co)}\) and \(\mathrm {(SDC)}_*\). The goal is to describe conditions on \(a_2\) determining each one of the possible bifurcation cases described in Theorem 3.1 for (5.1). The function \(a_2\) will be sign-preserving under all these conditions. Note the \(\textrm{sp}(a_1)\) is the Sacker and Sell spectrum of \(f_x\) on \({\mathcal {M}}_0\).
Proposition 5.1
Assume that the function f given by (5.2) is \(\mathrm {(Co)}\) and \(\mathrm {(SDC)}_*\), and that
-
(H)
there exist \(\rho _0>0\) and \(0<\epsilon _0<r_1\) such that \(|h(\omega ,x)|\le \epsilon _0\) for all \(\omega \in \Omega \) if \(|x|\le \rho _0\), \(\sqrt{(\lambda _++k_2)/(r_1-\epsilon _0)}<\rho _0\), and \(\sqrt{(-\lambda _--k_1)/(r_2+\epsilon _0)}<\rho _0\).
We call \(s_1=r_1-\epsilon _0\) and \(s_0=r_2+\epsilon _0\). Then,
-
(i)
if \(a_2(\omega )=0\) for all \(\omega \in \Omega \), then (5.1) exhibits the classical pitchfork bifurcation of minimal sets described in Theorem 3.1(ii).
-
(ii)
If \(k_1<-\lambda _+\) and
$$\begin{aligned} a_2(\omega )>2\sqrt{s_2(-\lambda _--k_1)}\quad (\text {resp. }a_2(\omega )<-2\sqrt{s_2(-\lambda _--k_1)}\,) \end{aligned}$$for all \(\omega \in \Omega \), then (5.1) exhibits the local saddle-node and transcritical bifurcations of minimal sets described in Theorem 3.1(i), with \(\alpha _\lambda \) (resp. \(\beta _\lambda \)) colliding with 0 on a residual \(\sigma \)-invariant set as \(\lambda \downarrow \lambda _+\).
-
(iii)
If \(k_1<-\lambda _+\) and
$$\begin{aligned} a_2(\omega )>2\sqrt{s_2(-\lambda _+-k_1)}\quad (\text {resp. }a_2(\omega )<-2\sqrt{s_2(-\lambda _+-k_1)}\,) \end{aligned}$$for all \(\omega \in \Omega \), then (5.1) does not exhibit the classical pitchfork bifurcation of minimal sets described in Theorem 3.1(ii).
-
(iv)
If \(0\le a_2(\omega )<(\lambda _+-\lambda _-)\sqrt{s_1/(\lambda _++k_2)}\) (resp. \(-(\lambda _+-\lambda _-)\sqrt{s_1/(\lambda _++k_2)}<a_2(\omega )\le 0\)) for all \(\omega \in \Omega \), then (5.1) does not exhibit the local saddle-node and transcritical bifurcations of minimal sets described in Theorem 3.1(i).
-
(v)
If
$$\begin{aligned} s_1(\lambda _+-\lambda _-)^2+4\,s_2(\lambda _++k_1)(\lambda _++k_2)>0\,, \end{aligned}$$and
$$\begin{aligned} \begin{aligned}&2\sqrt{s_2(-\lambda _+-k_1)}<a_2(\omega )<\frac{(\lambda _+-\lambda _-)\sqrt{s_1}}{\sqrt{\lambda _++k_2}}\\&\quad \Bigg (\text {resp.}\;\;-\frac{(\lambda _+-\lambda _-)\sqrt{s_1}}{\sqrt{\lambda _++k_2}}< a_2(\omega )<-2\sqrt{s_2(-\lambda _+-k_1)}\Bigg ) \end{aligned} \end{aligned}$$for all \(\omega \in \Omega \), then (5.1) exhibits the generalized pitchfork bifurcation of minimal sets described in Theorem 3.1(iii).
Proof
(i) This property is proved in Proposition 6.5(ii) of [11].
(ii)-(iii) We define \(\rho _\pm =\sqrt{(-\lambda _\pm -k_1)/s_2}\) and observe that \(\rho _+\le \rho _-<\rho _0\). Hence, \(a_3(\omega )+h(\omega ,\rho _\pm )\le r_2+\epsilon _0=s_2\). This allows us to check the assertions of Lemma 4.6 for \(\lambda =\lambda _+\) and \(\lambda =\lambda _--\delta \) (for some small \(\delta >0\) for which \(\sqrt{(-(\lambda _--\delta )-k_1)/s_2}<\rho _0\)) and with \(r_2\) replaced by \(s_2\), just by repeating the same proof. Once this is done, the arguments of Proposition 4.7(i) and (ii) prove assertions (ii) and (iii).
(iv) The proof is analogous to that of Proposition 4.8. We sketch it in the case of positive \(a_2\) and refer to Proposition 4.8 for the details. Condition (H) and the hypothesis in (iv) allow us to take \(\delta >0\) such that, if \(\lambda \in [\lambda _+,\lambda _++\delta ]\), then \(\sqrt{(\lambda +k_2)/(r_1-\epsilon _0)}<\rho _0\) and \(a_2(\omega )\le (\lambda _+-\lambda _-)\sqrt{s_1/(\lambda +k_2)}\) for all \(\omega \in \Omega \). We fix one of these values of \(\lambda \) and take \(\rho \) satisfying \(\sqrt{(\lambda +k_2)/s_1}<\rho \le \rho _0\) in order to deduce from the bound \(a_3(\omega )+h(\omega ,\rho )\ge r_1-\epsilon _0=s_1\) (ensured by (H)) that \(\rho \) is a strict global upper solution of \(x'=(-a_3(\omega {\cdot }t)+h(\omega {\cdot }t,x))x^3+(a_1(\omega {\cdot }t)+\lambda )x\). Let \({{\hat{\beta }}}_\lambda \) be the upper delimiter equilibrium of the global attractor of the corresponding skew-product flow. The next step is checking that \({{\hat{\beta }}}_\lambda (\omega )\le \sqrt{(\lambda +k_2)/s_1}\) for all \(\omega \in \Omega \) if \(\lambda \in (\lambda _+,\lambda _++\delta ]\). Once this is done, we can deduce that \({{\hat{\beta }}}_\lambda \) is also a strong \(\tau _{\lambda _-}\)-superequilibrium and that the limit \({{\hat{\beta }}}_{\lambda _+}=\lim _{\lambda \downarrow \lambda _+}{{\hat{\beta }}}_\lambda \) takes the value 0 on a residual set of points. Finally, we assume that (5.1) is in case (i) of Theorem 3.1 and use the previous properties to get a contradiction.
(v) As in Proposition 4.9, this follows from (iii), (iv) and Theorem 3.1. \(\square \)
We complete this short section by analyzing ways to guarantee the initial hypotheses of Proposition 5.1: f is (Co) and (SDC)\(_*\), and (H) holds. The first objectives are achieved, at least, in the following situations:
Proposition 5.2
Assume that \((-a_3(\omega )+h(\omega ,x))x^3\) is \(\mathrm {(Co)}_2\) and \(\mathrm {(SDC)}_*\). Then, the function f defined by (5.2) is \(\mathrm {(Co)}_2\) and \(\mathrm {(SDC)}_*\). Moreover, if \((-r+h(\omega ,x))x^3\) is \(\mathrm {(Co)}\) and \(\mathrm {(DC)}\) for some \(r<r_1\) (or \(r\le r_1\) if \(a_3\) is not constant), then \((-a_3(\omega )+h(\omega ,x))x^3\) is \(\mathrm {(Co)}_2\) and \(\mathrm {(SDC)}_*\).
Proof
Consider \(f(\omega ,x)=((-a_3(\omega )+h(\omega ,x))x^3)+(a_2(\omega )x^2+a_1(\omega )x)\) and recall that any quadratic polynomial is \(\mathrm {(DC)}\); that the sum of a \(\mathrm {(SDC)}_*\) function and a \(\mathrm {(DC)}\) one is \(\mathrm {(SDC)}_*\) (see Sect. 3 of [11]); and that the sum of a \(\mathrm {(Co)}_2\) function and a second degree polynomial is \(\mathrm {(Co)}_2\).
Let us check the second assertion. Since \((r-a_3(\omega ))x^3\) is \(\mathrm {(SDC)}_*\) (see Sect. 2.6) and \((-r+h(\omega ,x))x^3\) is \(\mathrm {(DC)}\), the sum is \(\mathrm {(SDC)}_*\). In addition, the \(\mathrm {(Co)}\) property of \((-r+h(\omega ,x))x^3\) means that \(\lim _{|x|\rightarrow \infty } (-r+h(\omega ,x))x^2=-\infty \) uniformly on \(\Omega \), and hence there exists \(\rho >0\) such that \(h(\omega ,x)<r\) for all \(\omega \in \Omega \) and \(x\ge \rho \). Consequently,
for all \(\omega \in \Omega \), and hence \(\lim _{x\rightarrow \infty }(-a_3(\omega )+h(\omega ,x))x=-\infty \) for all \(\omega \in \Omega \). The compactness of \(\Omega \) ensures that the limit is uniform. Analogously, \(\lim _{x\rightarrow -\infty }(-a_3(\omega )+h(\omega ,x))x=\infty \) uniformly on \(\Omega \). Hence, \((-a_3(\omega )+h(\omega ,x))x^3\) is \(\mathrm {(Co)}_2\). \(\square \)
Regarding (H), notice that the included inequality \(\sqrt{(-\lambda _--k_1)/(r_2+\epsilon _0)}<\rho _0\) is fulfilled by taking a large enough upper bound \(r_2\) for \(a_3\) (although the smaller \(r_2\) is, the less restrictive the conditions in points (ii), (iii) and (v) of Proposition 5.1 are). The following results indicate three ways to get the rest of the conditions in (H). Recall that h is always assumed to belong to \(C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) and to satisfy \(h(\omega ,0)=0\) for all \(\omega \in \Omega \). And recall also the meaning of \(\lambda _-,\lambda _+,k_1,k_2,r_1\) and \(r_2\).
Proposition 5.3
-
(i)
Assume that \(a_3\) and h are fixed, take \(0<\epsilon _0<r_1\) and \(\rho _0>0\) such that \(|h(\omega ,x)|\le \epsilon _0\) for all \(\omega \in \Omega \) if \(|x|\le \rho _0\), and call \(s_1=r_1-\epsilon _0\). Let \(k_1<0<k_2\) satisfy \(k_2-k_1<\rho _0^2\,s_1\) and \(a_1\in C(\Omega )\) satisfy \(k_1\le a_1(\omega )\le k_2\) for all \(\omega \in \Omega \), choose the upper bound \(r_2\) for \(a_3\) large enough to get \(\sqrt{(k_2-k_1)/(r_2+\epsilon _0)}<\rho _0\), and call \(s_2=r_2+\epsilon _0\). Then, (H) is fulfilled. If, in addition, \((\Omega ,\sigma )\) is not uniquely ergodic, then \(a_1\) can be chosen to get \(\lambda _-<\lambda _+\) and \(s_1(\lambda _+-\lambda _-)^2+4\,s_2(\lambda _++k_1)(\lambda _++ k_2)>0\). Consequently, if the function f given by (5.2) is \(\mathrm {(Co)}\) and \(\mathrm {(SDC)}_*\), suitable choices of \(a_1\) and \(a_2\) provide the three possible bifurcation diagrams for (5.1).
-
(ii)
Assume that \(a_1\) and h are fixed and take \(\epsilon _0>0\) and \(\rho _0>0\) such that \(|h(\omega ,x)|\le \epsilon _0\) for all \(\omega \in \Omega \) if \(|x|\le \rho _0\). If \(r_1>(\lambda _++k_2)/\rho _0^2+\epsilon _0\) and \(a_3\in C(\Omega )\) satisfies \(r_1\le a_3(\omega )\) for all \(\omega \in \Omega \), then (H) is fulfilled for large enough \(r_2\).
-
(iii)
Assume that \(a_1\) and \(a_3\) are fixed, and take \(\rho _0\) and m with \(0<\rho _0<\sqrt{(\lambda _++k_2)/r_1}\) and \(0<m< r_1/\rho _0-(\lambda _++k_2)/\rho _0^3\). If \(h\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) satisfies \(h(\omega ,0)=0\) and \(|h_x(\omega ,x)|\le m\) for all \(\omega \in \Omega \) if \(|x|\le \rho _0\), then (H) is fulfilled with \(\epsilon _0=\rho _0 m\) and a large enough \(r_2\).
Proof
-
(i)
Notice that \(\sqrt{(-\lambda _-\!-\!k_1)/(r_2\!+\!\epsilon _0)}\!\le \!\sqrt{(k_2\!-\!k_1)/s_2}\!<\!\rho _0\) and also \(\sqrt{(\lambda _+\!\!+\!k_2)/(r_1\!-\!\epsilon _0)}\!\le \sqrt{(k_2-k_1)/s_1}<\rho _0\). This proves the first assertion.
To prove the second one, we apply Proposition 4.11 with \(\alpha _1=k_1\) and \(\alpha _n=k_2\). It shows that \(a_1\) has band spectrum \([-\lambda _+,-\lambda _-]\) and that \((\lambda _+-\lambda _-)^2+4s(\lambda _++k_1)(\lambda _++k_2)>0\). Lemma 4.5 shows that \(\textrm{sp}(a_1)\subset (k_1,k_2)\). The last assertion in (i) follows from Proposition 5.1.
-
(ii)
If \(r_1>(\lambda _++k_2)/\rho _0^2+\epsilon _0\), then \(\sqrt{(\lambda _++k_2)/(r_1-\epsilon _0)}<\rho _0\).
-
(iii)
It is clear that \(0<\epsilon _0<r_1\), and easy to check that \(\sqrt{(\lambda _++k_2)/(r_1-\epsilon _0)}<\rho _0\). A large enough \(s_2\) ensures \(\sqrt{(-\lambda _--k_1)/(r_2+\epsilon _0)}<\rho _0\). The equality \(h(\omega ,x)=\int _0^1 xh_x(\omega ,sx)\,ds\) yields \(|h(\omega ,x)|\le \rho _0m=\epsilon _0\) for \(|x|\le \rho _0\).\(\square \)
6 A Second Bifurcation Problem
The ideas and methods developed in [11] and in the previous sections of this paper allow us to classify and describe all the possibilities for the bifurcation diagram of a problem different from that analyzed in Sects. 3, 4 and 5, namely
Besides its own interest, this analysis allows us to go deeper in the construction of patterns for the three bifurcation possibilities described in Theorem 3.1, as explained at the end of this section.
As before, f is assumed to be \(C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) and \(\mathrm {(Co)}_2\) (see Sect. 2.4) with \(f(\omega ,0)=0\) for all \(\omega \in \Omega \), and \(\mu \in {\mathbb {R}}\) is the bifurcation parameter. We expect not to generate risk of confusion while denoting by \(\tau _\mu :{\mathcal {U}}_\mu \subseteq {\mathbb {R}}\times \Omega \times {\mathbb {R}}\rightarrow \Omega \times {\mathbb {R}}\) the local skewproduct flow \((t,\omega ,x_0)\mapsto (\omega {\cdot }t,u_\mu (t,\omega ,x_0))\) defined from the maximal solutions \({\mathcal {I}}_{\omega ,x_0}^\mu \rightarrow {\mathbb {R}}\), \(t\mapsto u_\mu (t,\omega ,x_0)\) of (6.1)\(_\mu \). Note that the set \(\mathcal M_0=\Omega \times \{0\}\) is \(\tau _\mu \)-minimal for all \(\mu \in {\mathbb {R}}\), and that the Sacker and Sell spectrum of \(f_x +2\mu x\) on \({\mathcal {M}}_0\) (see Sect. 2.5) is independent of \(\mu \). We represent it by \(\textrm{sp}(f_x({\cdot },0))\).
Note that \(f+\mu x^2\) is \(\mathrm {(Co)}_2\) if f is (unlike what happens with the \(\mathrm {(Co)}\) condition).
We will denote by \({\mathcal {A}}_\mu \) the corresponding global attractor. As recalled in Sect. 2.4, \({\mathcal {A}}_\mu =\bigcup _{\omega \in \Omega }\big (\{\omega \}\times [\alpha _\mu (\omega ),\beta _\mu (\omega )]\big )\), where \(\alpha _\mu \) and \(\beta _\mu \) are (lower and upper) semicontinuous \(\tau _\mu \)-equilibria. The following proposition analyzes the behavior of these maps as \(\mu \) varies.
Proposition 6.1
Let \(f\in C^{0,1}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) be \(\mathrm {(Co)}_2\). Then,
-
(i)
for any \(\omega \in \Omega \), the maps \(\mu \mapsto \beta _\mu (\omega )\) and \(\mu \mapsto \alpha _\mu (\omega )\) are nondecreasing on \({\mathbb {R}}\) and they are, respectively, right- and left-continuous. If \(\beta _{\mu _0}\) (resp. \(\alpha _{\mu _0}\)) is strictly positive (resp. strictly negative) for some \(\mu _0\in {\mathbb {R}}\), then \(\beta _\mu (\omega )<\beta _{\mu _0}(\omega )\) (resp. \(\alpha _\mu (\omega )<\alpha _{\mu _0}(\omega )\)) for all \(\mu <\mu _0\) and \(\omega \in \Omega \), and \(\beta _{\mu _0}(\omega )<\beta _\mu (\omega )\) (resp. \(\alpha _{\mu _0}(\omega )<\alpha _\mu (\omega )\)) for all \(\mu >\mu _0\) and \(\omega \in \Omega \).
-
(ii)
\(\lim _{\mu \rightarrow -\infty } \alpha _\mu (\omega )=-\infty \) and \(\lim _{\mu \rightarrow \infty }\beta _\mu (\omega )=\infty \) uniformly on \(\Omega \).
Proof
-
(i)
Let \(\xi <\mu \). Since \(\beta '_\xi (\omega )=f(\omega ,\beta _\xi (\omega ))+\xi \beta _\xi ^2(\omega )\le f(\omega ,\beta _\xi (\omega ))+\mu \beta _\xi ^2(\omega )\), \(\beta _\xi \) is a global lower solution of (6.1)\(_\mu \). Consequently, \(\beta _\xi (\omega )\le \beta _\mu (\omega )\) for all \(\omega \in \Omega \) (see Sect. 2.4). Moreover, if \(\beta _{\mu _0}\) is strictly positive, the previous inequalities are strict. The case of \(\alpha _\mu \) follows analogously. To show the one-side continuity, we proceed as in the proof of Theorem 5.5(i) of [11].
-
(ii)
Let \(\rho >0\) be fixed. There exists \(\mu _\rho >0\) such that \(f(\omega ,\rho )+\mu _\rho \rho ^2\ge 0\) for all \(\omega \in \Omega \), and \(f(\omega ,-\rho )-\mu _\rho (-\rho )^2<0\) for all \(\omega \in \Omega \), and hence \(\omega \mapsto \rho \) is a global lower \(\tau _\mu \)-solution and \(-\rho \) is a global upper \(\tau _{-\mu }\)-solution for \(\mu \ge \mu _\rho \). This ensures that \(\rho \le \beta _\mu (\omega )\) for all \(\omega \in \Omega \) and \(-\rho \ge \alpha _{-\mu }(\omega )\) for all \(\omega \in \Omega \) if \(\mu \ge \mu _\rho \) (see again Sect. 2.4), as we wanted to prove.
\(\square \)
The proof of Theorem 6.3, which describes the possible bifurcation diagrams for (6.1) (depicted in Figs. 3 and 4), requires the next technical result, similar to Proposition 4.4 of [11].
Proposition 6.2
Let \(f\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) be \(\mathrm {(DC)}\), let us fix \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\), \(\lambda _0>0\) and \(\nu <\mu \) (resp. \(\mu <\nu \)), let \(\kappa _\mu ^1:\Omega \rightarrow {\mathbb {R}}\) be an m-measurable \(\tau _\mu \)-equilibrium, and let \(\kappa _\nu ^2:\Omega \rightarrow {\mathbb {R}}\) be an m-measurable equilibrium of \(x'=f(\omega {\cdot }t,x)-\lambda _0x+\nu x^2\) such that \(0<\kappa _\nu ^2(\omega )<\kappa _\mu ^1(\omega )\) (resp. \(\kappa _\mu ^1(\omega )<\kappa _\nu ^2(\omega )<0\)) for m-a.e. \(\omega \in \Omega \). Then,
Proof
We define the m-a.e. positive (resp. negative) function \(k(\omega )=\kappa _\mu ^1(\omega )-\kappa _\nu ^2(\omega )\) and \(F(\omega ,y)=\int _0^1 f_x(\omega ,sy+\kappa _\nu ^2(\omega ))\, ds\). Then, it is not hard to check that
Notice that \(\kappa _\mu ^1\), \(\kappa _\nu ^2\) and k are bounded (see Sect. 2.4), that \(k'(\omega )/k(\omega )-F(\omega ,k(\omega ))-\nu (\kappa _\mu ^1(\omega )+\kappa _\nu ^2(\omega ))\) is strictly positive for m-a.e. \(\omega \in \Omega \), and that \(F(\omega ,k(\omega ))\) and \(\nu (\kappa _\mu ^1(\omega )+\kappa _\nu ^2(\omega ))\) are in \(L^1(\Omega )\). Then, Birkoff’s Ergodic Theorem (see Theorem 1 in Sect. 2 of Chapter 1 of [10] and Proposition 1.4 of [15]) yields
The d-concavity of f and Taylor’s Theorem ensure that \(F(\omega ,k(\omega ))-F(\omega ,0)\ge k(\omega )F_y(\omega ,k(\omega ))\) for all \(\omega \in \Omega \). Now, we derive \(yF(\omega ,y)=f(\omega ,y+\kappa _\nu ^2(\omega ))-f(\omega ,\kappa _\nu ^2(\omega ))\) with respect to y and evaluate at \(y=k(\omega )\), obtaining \(F(\omega ,k(\omega ))+k(\omega )F_y(\omega ,k(\omega ))=f_x(\omega ,\kappa _\mu ^1(\omega ))\). Since \(F(\omega ,0)=f_x(\omega ,\kappa _\nu ^2(\omega ))\), the last equality and the previous inequality yield \(f_x(\omega ,\kappa _\mu ^1(\omega ))+f_x(\omega ,\kappa _\nu ^2(\omega ))\le 2F(\omega ,k(\omega ))\). In turn, this inequality and (6.2) yield
which proves the statement in any of the two stated situations. \(\square \)
Theorem 6.3
Let \(f\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) be \(\mathrm {(Co)}_2\) and \(\mathrm {(SDC)}_*\).
-
(i)
(No bifurcation). If \(\textrm{sp}(f_x(\cdot ,0))\subset (0,\infty )\), then for all \(\mu \in {\mathbb {R}}\) there exist three hyperbolic \(\tau _\mu \)-minimal sets \({\mathcal {M}}_\mu ^l<{\mathcal {M}}_0=\Omega \times \{0\}<{\mathcal {M}}_\mu ^u\), where \({\mathcal {M}}_\mu ^l\) and \({\mathcal {M}}_\mu ^u\) are respectively attractive hyperbolic copies of the base and given by the graphs of \(\alpha _\mu \) and \(\beta _\mu \), \({\mathcal {M}}_0\) is a repulsive hyperbolic copy of the base, and \(\lim _{\mu \rightarrow \infty }\alpha _\mu (\omega )=\lim _{\mu \rightarrow -\infty }\beta _\mu (\omega )=0\) uniformly on \(\Omega \).
-
(ii)
(Two local saddle-node bifurcations). If \(\textrm{sp}(f_x(\cdot ,0))\subset (-\infty ,0)\), then \({\mathcal {M}}_0\) is an attractive hyperbolic \(\tau _\mu \)-copy of the base for all \(\mu \in {\mathbb {R}}\) and there exist \(\mu _1<\mu _2\) such that: for all \(\mu <\mu _1\) (resp. \(\mu >\mu _2\)), there exist three hyperbolic \(\tau _\mu \)-copies of the base \({\mathcal {M}}_\mu ^l<{\mathcal {N}}_\mu <{\mathcal {M}}_0\) (resp. \({\mathcal {M}}_0<{\mathcal {N}}_\mu <{\mathcal {M}}_\mu ^u\)) which are hyperbolic copies of the base, given by the graphs of \(\alpha _\mu<\kappa _\mu <0\) (resp. \(0<\kappa _\mu <\beta _\mu \)), where \({\mathcal {M}}_\mu ^l\) (resp. \({\mathcal {M}}_\mu ^u\)) is hyperbolic attractive and \({\mathcal {N}}_\mu \) is hyperbolic repulsive, and \(\mu \mapsto \kappa _\mu \) is strictly decreasing on \((-\infty ,\mu _1)\) (resp. \((\mu _2,\infty )\)); the graphs of \(\alpha _\mu \) and \(\kappa _\mu \) (resp. \(\kappa _\mu \) and \(\beta _\mu \)) collide on a residual \(\sigma \)-invariant set as \(\mu \uparrow \mu _1\) (resp. \(\mu \downarrow \mu _2\)), giving rise to a nonhyperbolic minimal set \({\mathcal {M}}^l_{\mu _1}\) (resp. \({\mathcal {M}}^u_{\mu _2}\)); for \(\mu \in (\mu _1,\mu _2)\), \({\mathcal {A}}_\mu ={\mathcal {M}}_0\); and \(\lim _{\mu \rightarrow \pm \infty }\kappa _\mu (\omega )=0\) uniformly on \(\Omega \).
-
(iii)
(Weak generalized transcritical bifurcation). If \(0\in \textrm{sp}(f_x(\cdot ,0))\), then \({\mathcal {M}}_0\) is a nonhyperbolic \(\tau _\mu \)-copy of the base for all \(\mu \in {\mathbb {R}}\). In addition, there exist \(\mu _1\le \mu _2\) such that: for all \(\mu <\mu _1\) (resp. \(\mu >\mu _2\)) there exist exactly two \(\tau _\mu \)-minimal sets \({\mathcal {M}}_\mu ^l<{\mathcal {M}}_0\) (resp. \({\mathcal {M}}_0<{\mathcal {M}}_\mu ^u\)), where \({\mathcal {M}}_\mu ^l\) (resp. \({\mathcal {M}}_\mu ^u\)) is an attractive hyperbolic copy of the base given by the graph of \(\alpha _\mu \) (resp. \(\beta _\mu \)); and if \({\mathcal {M}}_0\) is the unique \(\tau _{\mu _1}\)-minimal set (resp. \(\tau _{\mu _2}\)-minimal set), then \(\alpha _\mu \) and 0 (resp. 0 and \(\beta _\mu \)) collide on a residual \(\sigma \)-invariant set as \(\mu \uparrow \mu _1\) (resp. \(\mu \downarrow \mu _2\)). In addition, if \(0\ne \inf \textrm{sp}(f_x(\cdot ,0))\), then \(\mu _1<\mu _2\) and \({\mathcal {M}}_0\) is the unique \(\tau _\mu \)-minimal set for any \(\mu \in (\mu _1,\mu _2)\); and if \(0=\inf \textrm{sp}(f_x(\cdot ,0))\), then \({\mathcal {M}}_0\) is the unique \(\tau _{\mu }\)-minimal set for all \(\mu \in [\mu _1,\mu _2]\).
Proof
We call \({\mathcal {M}}_\mu ^l\) and \({\mathcal {M}}_\mu ^u\) the lower and upper \(\tau _\mu \)-minimal sets, defined as in Sect. 3, and recall that they are attractive if they are hyperbolic, in which case they respectively coincide with the graphs of the continuous maps \(\alpha _\mu \) and \(\beta _\mu \).
-
(i)
Since every Lyapunov exponent of \({\mathcal {M}}_0\) is strictly positive for any \(\mu \in {\mathbb {R}}\) (see Sect. 2.5), \({\mathcal {M}}_0\) is a repulsive hyperbolic \(\tau _\mu \)-minimal set for every \(\mu \in {\mathbb {R}}\). Consequently, there exist three different hyperbolic \(\tau _\mu \)-minimal sets \({\mathcal {M}}_\mu ^l<{\mathcal {M}}_0<{\mathcal {M}}_\mu ^u\) (see Sect. 2.6), with \({\mathcal {M}}_\mu ^l\) and \({\mathcal {M}}_\mu ^u\) given respectively by the graphs of \(\alpha _\mu <\beta _\mu \), which are continuous. The hyperbolic continuation of minimal sets (see Theorem 3.8 of [28]) guarantees the continuity of the maps \({\mathbb {R}}\rightarrow C(\Omega )\), \(\mu \mapsto \beta _\mu \) and \({\mathbb {R}}\rightarrow C(\Omega )\), \(\mu \mapsto \alpha _\mu \) in the uniform topology. To check that \(\lim _{\mu \rightarrow -\infty }\beta _\mu (\omega )=0\) uniformly on \(\Omega \), we take any \(\epsilon >0\), use coercivity to find \(\rho>\epsilon >0\) such that \(f(\omega ,x)\le 0\) for all \(x\ge \rho \) and \(\omega \in \Omega \), and choose \(\mu _\epsilon <0\) such that \(f(\omega ,x)+\mu _\epsilon x^2\le 0\) for all \(x\in [\epsilon ,\rho ]\) and \(\omega \in \Omega \). Then, \(f(\omega ,x)+\mu _\epsilon x^2\le 0\) for all \(x\ge \epsilon \) and \(\omega \in \Omega \). According to Theorem 5.1(i) of [11], \(\beta _\mu (\omega )\le \epsilon \) for all \(\omega \in \Omega \) if \(\mu \le \mu _\epsilon \), which proves the assertion. The argument is analogous for \(\alpha _\mu \).
-
(ii)
Since every Lyapunov exponent of \({\mathcal {M}}_0\) is strictly negative, \({\mathcal {M}}_0\) is always an attractive hyperbolic \(\tau _\mu \)-minimal set for all \(\mu \in {\mathbb {R}}\). We fix \(\rho >0\) and look for \(\mu ^+_\rho \) such that \(f(\omega ,\rho )+\mu ^+_\rho \rho ^2>0\): if \(\mu \ge \mu ^+_\rho \), then \(\rho \) is a global strict lower solution of (6.1)\(_\mu \), and hence its graph is strictly below (resp. strictly above) a minimal set \(\mathcal M^u_\mu \) (resp. \({\mathcal {N}}_\mu \)) contained in the \(\varvec{\omega }\)-limit (resp. \(\varvec{\alpha }\)-limit) of any point \((\omega ,\rho )\) (see Sect. 2.3). The attractive hyperbolicity of \({\mathcal {M}}_0\) precludes \({\mathcal {N}}_\mu ={\mathcal {M}}_0\). That is, there exist three distinct \(\tau _\mu \)-minimal sets, so they are hyperbolic copies of the base, with \({\mathcal {M}}^u_\mu \) attractive (and given by the graph of \(\beta _\mu \)) and \({\mathcal {N}}_\mu \) repulsive. A similar argument works for \(-\rho \) and \(\mu \le \mu ^-_\rho \) if \(f(\omega ,-\rho )+\mu ^-_\rho \rho ^2<0\), providing three different hyperbolic \(\tau _\mu \)-copies of the base \({\mathcal {M}}^l_\mu<\mathcal N_\mu <{\mathcal {M}}_0\), with \({\mathcal {M}}^l_\mu \) attractive (and given by the graph of \(\alpha _\mu \)) and \({\mathcal {N}}_\mu \) repulsive. Let \(\kappa _\mu \) be \(\tau _\mu \)-equilibrium whose graph is \(\mathcal N_\mu \), both for \(\mu \ge \mu _\rho ^+\) and \(\mu \le \mu _\rho ^-\). Since the initially fixed \(\rho >0\) is as small as desired, \(\lim _{\mu \rightarrow \pm \infty }\kappa _\mu (\omega )=0\) uniformly on \(\Omega \). Let us define \({\mathcal {I}}_1=\{\mu \in {\mathbb {R}}:\,\) \(\mathcal M_\xi ^l\) is hyperbolic and \({\mathcal {M}}_\xi ^l<{\mathcal {M}}_0\) for all \(\xi <\mu \}\) and \({\mathcal {I}}_2=\{\mu \in {\mathbb {R}}:\,\) \(\mathcal M_\xi ^u\) is hyperbolic and \({\mathcal {M}}_\xi ^u>{\mathcal {M}}_0\) for all \(\xi >\mu \}\), and observe that \(\mu _\rho ^-\in {\mathcal {I}}_1\) and \(\mu _\rho ^+\in {\mathcal {I}}_2\). We also define \(\mu _1=\sup {\mathcal {I}}_1\) and \(\mu _2=\inf {\mathcal {I}}_2\) and note that \(\mu _1\notin {\mathcal {I}}_1\) and \(\mu _2\notin {\mathcal {I}}_2\): \({\mathcal {I}}_1=(-\infty ,\mu _1)\) and \({\mathcal {I}}_2=(\mu _2,\infty )\). The existence of at most three \(\tau _\mu \)-minimal sets for any \(\mu \) ensures \(\mu _1\le \mu _2\), and hence they are finite. If \(\mu \in {\mathcal {I}}_1\) (resp. \(\mu \in {\mathcal {I}}_2\)) then \({\mathcal {M}}^l_\mu \) (resp. \({\mathcal {M}}^u_\mu \)) is attractive and coincides with the graph of \(\alpha _\mu \) (resp. \(\beta _\mu \)), which is continuous, and there exists a repulsive hyperbolic copy of the base \(\mathcal N_\mu \) for \(\tau _\mu \) with \({\mathcal {M}}_\xi ^l<{\mathcal {N}}_\mu <\mathcal M_0\) (resp. \({\mathcal {M}}_0<{\mathcal {N}}_\mu <{\mathcal {M}}_\xi ^l\)): see Sect. 2.6. Let \(\kappa _\mu \) be the continuous \(\tau _\mu \)-equilibrium whose graph is \({\mathcal {N}}_\mu \) for \(\mu \in {\mathcal {I}}_1\cup {\mathcal {I}}_2\). As in (i), the hyperbolic continuation of minimal sets guarantees the continuity with respect to the uniform topology of the maps \(\mu \mapsto \alpha _\mu ,\kappa _\mu \) on \({\mathcal {I}}_1\) and \(\mu \mapsto \kappa _\mu ,\beta _\mu \) on \({\mathcal {I}}_2\). In addition, if \(\xi _1<\xi _2<\mu _1\) or \(\mu _2<\xi _1<\xi _2\), then \(\kappa _{\xi _1}\) is a strong time-reversed \(\tau _{\xi _2}\)-superequilibrium, and hence the \(\varvec{\upalpha }\)-limit set for \(\tau _{\xi _2}\) of a point \((\omega ,\kappa _{\xi _1}(\omega ))\) contains a \(\tau _{\xi _2}\)-minimal set which is strictly below the graph \({\mathcal {N}}_{\xi _1}\) of \(\kappa _{\xi _1}\), and which (see again Sect. 2.3), as above, must coincide with \({\mathcal {N}}_{\xi _2}\). That is, \(\mu \mapsto \kappa _\mu (\omega )\) is strictly decreasing on \({\mathcal {I}}_1\) and \({\mathcal {I}}_2\) for all \(\omega \in \Omega \). The maps \(\alpha _{\mu _1}(\omega )=\lim _{\mu \uparrow \mu _1}\alpha _\mu (\omega )\) and \(\kappa _{\mu _1}(\omega )=\lim _{\mu \uparrow \mu _1}\kappa _\mu (\omega )\) satisfy \(\alpha _{\mu _1}\le \kappa _{\mu _1}<0\) and respectively define lower and upper semicontinuous \(\tau _{\mu _1}\)-equilibria which must coincide on the residual set of its common continuity points: otherwise they would define two different \(\tau _{\mu _1}\)-minimal sets \({\mathcal {M}}^l_{\mu _1}<{\mathcal {N}}_{\mu _1}<{\mathcal {M}}_0\) (see Proposition 2.3 of [11]), so \({\mathcal {M}}^l_{\mu _1}\) would be hyperbolic attractive and \(\mu _1\in {\mathcal {I}}_1\), which is not the case. Therefore, \(\mu _1\) is a local saddle-node bifurcation point of minimal sets and a point of discontinuity of the global attractor. In addition, the unique \(\tau _{\mu _1}\)-minimal set \(\mathcal M_{\mu _1}^l\) that they define is nonhyperbolic, which also follows from \(\mu _1\notin {\mathcal {I}}_1\). Similar arguments apply to \(\mu _2\). In addition, notice that \(\mu _1<\mu _2\), as otherwise there would exist three \(\tau _{\mu _1}\)-minimal sets, contradicting the nonhyperbolicity of \({\mathcal {M}}_{\mu _1}^l\). Let \(\mu \in (\mu _1,\mu _2)\), and let \(\omega _0\) be a common continuity point of \(\alpha _\mu \), \(\alpha _{\mu _1}\) and \(\kappa _{\mu _1}\), so that \(\alpha _{\mu _1}(\omega _0)=\kappa _{\mu _1}(\omega _0)\). Since \(\kappa _{\mu _1}\) is a strong \(\tau _\mu \)-subequilibrium and \(\alpha _{\mu _1}\le \alpha _\mu \), there exists \(t_0>0\) such that \(\kappa _{\mu _1}(\omega _0{\cdot }\cdot t_0)<u_\mu (t_0,\omega _0,\alpha _{\mu _1}(\omega _0))\le \alpha _\mu (\omega _0{\cdot }t_0)\). Let us call \(\omega _1=\omega _0{\cdot }t_0\) and assume for contradiction that \(\alpha _\mu (\omega _0)<0\) or, equivalently, \(\alpha _\mu (\omega _1)<0\). The previous property combined with \(\lim _{\xi \rightarrow -\infty }\kappa _\xi (\omega _1)=0\) and the continuity of \(\xi \mapsto \kappa _\xi (\omega _1)\) on \({\mathcal {I}}_1\) provides \(\alpha _\mu (\omega _1)=\kappa _{\xi _1}(\omega _1)\) for a \(\xi _1\in {\mathcal {I}}_1\). Since \(\kappa _{\xi _1}\) is a strong (and continuous) \(\tau _\mu \)-subequilibrium, there exists \(s_1>0\) and \(e_1>0\) such that \(\alpha _\mu (\omega _1{\cdot }t)>\kappa _{\xi _1}(\omega _1{\cdot }t)+e_1\) for all \(t\ge s_1\) (see Sect. 2.3), and we obtain the contradiction \(\alpha _\mu (\omega _1)\ge \kappa _{\xi _1}(\omega _1)+e_1\) by taking \(\{t_n\}\uparrow \infty \) with \(\omega _1=\lim _{n\rightarrow \infty }\omega _1{\cdot }t_n\). This means that \({\mathcal {M}}^l_\mu ={\mathcal {M}}_0\), and a similar argument shows \({\mathcal {M}}^u_\mu ={\mathcal {M}}_0\). Consequently, \({\mathcal {M}}_0\) is the unique \(\tau _\mu \) minimal set for \(\mu \in (\mu _1,\mu _2)\) and, since it is hyperbolic attractive, Theorem 3.4 of [11] proves that \({\mathcal {A}}_\mu ={\mathcal {M}}_0\).
-
(iii)
In this case, \({\mathcal {M}}_0\) is nonhyperbolic for all \(\mu \in {\mathbb {R}}\) (see Sect. 2.5), and this fact precludes the existence of three \(\tau _\mu \)-minimal sets (see Sect. 2.6). Let us check that \(\mathcal M^u_\mu \) is an attractive hyperbolic copy of the base if \(\mu \) is large enough. To this end, we choose \(\lambda _0>0\) such that the Sacker and Sell spectrum of \(f_x(\omega ,0)-\lambda _0\) is contained in \((-\infty ,0)\). Consequently, the bifurcation diagram of minimal sets of
$$\begin{aligned} x'=f(\omega {\cdot }t,x)-\lambda _0x+\nu x^2 \end{aligned}$$(6.3)
with respect to \(\nu \) is that described in (ii). Let \(\nu _2\) be the upper bifurcation point, fix \(\nu >\nu _2\), and let \({{\hat{\kappa }}}_\nu \) and \({{\hat{\beta }}}_\nu \) be the equilibria giving rise to the repulsive and attractive hyperbolic copies of the base for (6.3)\(_\nu \). Then, if \(\mu >\nu \),
which means that \({{\hat{\beta }}}_\nu \) is a global strict lower \(\tau _\mu \)-solution and hence that \({{\hat{\kappa }}}_\nu (\omega )<{{\hat{\beta }}}_\nu (\omega )<\beta _\mu (\omega )\) for all \(\omega \in \Omega \) (see Sect. 2.4). The definition of \({\mathcal {M}}^u_\mu \) ensures that it is above the graph of \({{\hat{\beta }}}_\nu \), and hence \({{\hat{\kappa }}}_\nu (\omega )<\gamma _\mu (\omega )\) for any \(\tau _\mu \)-equilibrium \(\gamma _\mu :\Omega \rightarrow {\mathbb {R}}\) with graph contained in \({\mathcal {M}}^u_\mu \). Since \({{\hat{\kappa }}}_\nu \) defines a repulsive hyperbolic copy of the base of (6.3)\(_\nu \), Proposition 6.2 ensures that \(\int _\Omega (f_x(\omega ,\gamma _\mu (\omega ))+2\mu \gamma _\mu (\omega ))\, dm<0\) for all \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\). This means that \({\mathcal {M}}_\mu ^u\) is an attractive hyperbolic minimal set for all \(\mu >\nu _2\). An analogous argument shows that \({\mathcal {M}}_\mu ^l\) is an attractive hyperbolic minimal set if \(-\mu \) is large enough.
Now, we define \({\mathcal {I}}_1\), \({\mathcal {I}}_2\), \(\mu _1\) and \(\mu _2\) as in (ii). Note that \(\mu _1\le \mu _2\): otherwise there would be three \(\tau _{\mu _1}\)-minimal sets. The definition of these two values of the parameter shows the first assertion in (iii), concerning \(\mu \notin [\mu _1,\mu _2]\). In addition, the definition on \({\mathcal {M}}^l_\mu \) (resp. \({\mathcal {M}}^u_\mu \)) shows that, if \({\mathcal {M}}_0\) is the unique \(\tau _{\mu _1}\)-minimal set (resp. \(\tau _{\mu _2}\)-minimal set), then \(\alpha _\mu \) and 0 (resp. 0 and \(\beta _\mu \)) collide on a residual \(\sigma \)-invariant set as \(\mu \uparrow \mu _1\) (resp. \(\mu \downarrow \mu _2\)).
Let us prove that \({\mathcal {M}}_0\) is the unique \(\tau _\mu \)-minimal set if \(\mu \in [\mu _1,\mu _2]\) in the case \(\inf \textrm{sp}(f_x(\cdot ,0))=0\), which means that \(\int _\Omega f_x(\omega ,0)\,dm\ge 0\) for all \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\). In this case, any \(\tau _\mu \)-minimal set different from \({\mathcal {M}}_0\) is hyperbolic attractive for any \(\mu \in {\mathbb {R}}\): Proposition 4.4 of [11] ensures that all the Lyapunov exponents of such a minimal set are strictly negative, from where the assertion follows. Hence, \({\mathcal {M}}_{\mu _1}^l\) and \({\mathcal {M}}_{\mu _2}^u\) coincide with \({\mathcal {M}}_0\) to not contradict the definition of \(\mu _1\) and \(\mu _2\). The monotonicity properties of \(\alpha _\mu \) and \(\beta _\mu \) established in Proposition 6.1 ensure that \({\mathcal {M}}^l_\mu ={\mathcal {M}}_0\) for all \(\mu \ge \mu _1\) and \(\mathcal M^u_\mu ={\mathcal {M}}_0\) for all \(\mu \le \mu _1\), and this proves the assertion.
In the rest of the proof, we work in the remaining case, \(\inf \textrm{sp}(f_x(\cdot ,0))<0\), which implies the existence of a measure \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) with \(\int _\Omega f_x(\omega ,0)\,dm<0\).
Let us prove that \(\mu _1<\mu _2\). We fix \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) with \(\int _\Omega f_x(\omega ,0)\,dm<0\). For \(\mu >\mu _2\), Lemma 3.2 ensures that \(\int _\Omega (f_x(\omega ,\kappa ^2_\mu (\omega ))+2\mu \kappa ^2_\mu (\omega ))\,dm>0\), where \(\kappa ^2_\mu \) is the m-measurable \(\tau _\mu \)-equilibrium providing the lower delimiter of the basin of attraction of the graph of \(\beta _\mu \), which satisfies \(0\le \kappa _\mu ^2<\beta _\mu \). Reasoning as in Theorem 3.1, we check that \(\mu \mapsto \kappa ^2_\mu (\omega )\) is nonincreasing on \({\mathcal {I}}_2\) for all \(\omega \in \Omega \). Hence, there exists the limit \(\kappa ^2_{\mu _2}=\lim _{\mu \downarrow \mu _2}\kappa ^2_\mu \ge 0\). Lebesgue’s Convergence Theorem ensures that \(\int _\Omega (f_x(\omega ,\kappa ^2_{\mu _2}(\omega ))+2\mu \kappa ^2_{\mu _2}(\omega ))\,dm\ge 0\). In particular, \(\kappa _{\mu _2}^2\) is different from 0 with respect to m. A symmetric procedure performed for \(\mu <\mu _1\) (now defining \(\kappa ^1_\mu \) as the upper delimiter of the basin of attraction of the graph of \(\alpha _\mu \), so that \(\mu \mapsto \kappa ^1_\mu \) is nonincreasing on \({\mathcal {I}}_1\)) shows the existence of a \(\tau _{\mu _1}\)-equilibrium \(\kappa _{\mu _1}^1\le 0\) with is different from 0 with respect to m. Finally, we assume for contradiction that \(\mu _1=\mu _2\), observe that \(\kappa ^1_{\mu _1}\le 0\le \kappa ^2_{\mu _2}\) define three \(\tau _{\mu _1}\)-equilibria which are different with respect to m, and conclude that \(\int _\Omega f_x(\omega ,0)\,dm>0\) (see Sect. 2.6), which is not the case. This contradiction proves the assertion.
It remains to check that \({\mathcal {M}}_\mu ^l={\mathcal {M}}_0\) for \(\mu >\mu _1\) and \({\mathcal {M}}_\mu ^u={\mathcal {M}}_0\) for \(\mu <\mu _2\), which ensures that \({\mathcal {M}}_0\) is the unique \(\tau _\mu \)-minimal set for \(\mu \in (\mu _1,\mu _2)\). We begin by assuming that \(\mathcal M_{\mu _2}^u={\mathcal {M}}_0\), which means that \(\beta _{\mu _2}\) vanishes on the residual set of its continuity points. Proposition 6.1(i) ensures that, if \(\mu <\mu _2\), then \(0\le \beta _\mu (\omega )\le \beta _{\mu _2}(\omega )=0\) at a common continuity point of both maps, and this ensures that \(\mathcal M_\mu ^u={\mathcal {M}}_0\), as asserted. Now, let us work in the case \({\mathcal {M}}_{\mu _2}^u>{\mathcal {M}}_0\). The argument adapts to this situation that of the two last paragraphs of the proof of Theorem 3.1, as we sketch in what follows. First, for \(\mu >\mu _2\), we consider the \(\tau _\mu \)-equilibrium \(\kappa _\mu ^2\) of the previous paragraph, which satisfies \(\kappa _\mu ^2(\omega )>0\) m-a.e. if \(\int _\Omega f_x(\omega ,0)\, dm<0\) for an \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\). Second, we combine this property with the nonhyperbolicity of \(\mathcal M^u_{\mu _2}\) to deduce that there are points in the graph of \(\kappa ^2_{\mu _2}=\lim _{\mu \downarrow \mu _2}\kappa ^2_\mu \) which are between the delimiter equilibria of \({\mathcal {M}}_{\mu _2}^u\). And third, we deduce from this fact that \(\beta _\mu (\omega )=0\) on its residual set of continuity points if \(\mu <\mu _2\), which proves that \({\mathcal {M}}_\mu ^u={\mathcal {M}}_0\) also in this case. The argument is analogous for \({\mathcal {M}}_\mu ^l\) and \(\mu >\mu _1\), and the proof is complete. \(\square \)


Some possibilities for the weak generalized transcritical bifurcation diagrams described in Theorem 6.3(iii). See Figs. 1 and 2 to understand the meaning of the different elements. For the first two diagrams, \(\textrm{sp}(f_x(\cdot ,0))\) is a nondegenerate interval which contains 0. The first one corresponds to \(\inf \textrm{sp}(f_x(\cdot ,0))<0<\sup \textrm{sp}(f_x(\cdot ,0))\) (which yields \(\mu _1<\mu _2\)), and the second one to \(\inf \textrm{sp}(f_x(\cdot ,0))=0\) with \(\mu _1<\mu _2\) (the diagram for \(\mu _1=\mu _2\) is obtained by deleting the vertical strip given by \((\mu _1,\mu _2)\)). In these diagrams, the existence of \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) such that \(\int _\Omega f_x(\omega ,0)\, dm>0\) and Proposition 5.2 of [11] (see the caption of Fig. 1) yield \(\alpha _\mu \) and \(\beta _\mu \) not identically 0 for all \(\mu \). (If \(\sup \textrm{sp}(f_x(\cdot ,0))=0\), we can just say \(\alpha _\mu \le 0\) if \(\mu \ge \mu _1\) and \(0\le \beta _\mu \) if \(\mu \ge \mu _2\).) The third diagram corresponds to \(\textrm{sp}(f_x(\cdot ,0))=\{0\}\) with \(\mu _1<\mu _2\) (again, erasing the vertical strip given by \((\mu _1,\mu _2)\) provides the diagram for \(\mu _1=\mu _2\) in this point spectrum case). For this case, Theorem 4.1 of [11] ensures the existence of a set \(\Omega _0\) with \(m(\Omega _0)=1\) for all \(m\in {\mathfrak {M}}_\textrm{erg}(\Omega ,\sigma )\) such that \(\alpha _\mu (\omega )=0\) and \(\beta _\mu (\omega )=0\) for \(\omega \in \Omega _0\) if \(\mu >\mu _2\) and \(\mu <\mu _1\), respectively, which we represent as \(\alpha _\mu \overset{m}{=}0\) and \(\beta _\mu \overset{m}{=}0\)
Autonomous cases \(x'=f(x)+\lambda x^2\) fitting the possibilities described in Theorem 6.3 are very easy to find, since they just depend on the sign of \(f'(0)\). For example, \(x'=-x^3+x+\lambda x^2\) for the first one, \(x'=-x^3-x+\lambda x^2\) for (ii) for the second one, and \(x'=-x^3+\lambda x^2\) for the third one. Note also that the model analyzed in Proposition 4.1 fits in the situation of Theorem 6.3(iii), and that in that case we can determine the values of \(\mu _1\) and \(\mu _2\).
The two first diagrams described in Theorem 6.3 (the absence of bifurcation points and the occurrence of two local saddle-node ones) are depicted in Figs. 3, and 4 shows several cases of weak generalized transcritical bifurcations.
We close this paper by using the information just obtained to go deeper in the analysis of the bifurcation possibilities for our initial problem (3.1), i.e., \(x'=f(\omega {\cdot }t,x)+\lambda x\). More precisely, Corollary 6.5 shows that for any \(\lambda _0\le -\inf \text {sp}(f_x(\cdot ,0))\) there exists a suitable \(\mu _0\in {\mathbb {R}}\) such that \(\lambda _0\) is the lower bifurcation point of the modified family \(x'=f(\omega {\cdot }t,x)+\mu _0x^2+\lambda x\), and that the three different possibilities of Theorem 3.1 correspond to \(\lambda _0<-\sup \text {sp}(f_x(\cdot ,0))\), \(\lambda _0=-\inf \text {sp}(f_x(\cdot ,0))\) and \(-\sup \text {sp}(f_x(\cdot ,0))\le \lambda _0<-\inf \text {sp}(f_x(\cdot ,0))\). To this end, we consider the two-parametric bifurcation problem of minimal sets
where \(f\in C^{0,2}(\Omega \times {\mathbb {R}},{\mathbb {R}})\) is \(\mathrm {(Co)}_2\) and \(\mathrm {(SDC)}_*\) and \(f(\omega ,0)=0\) for all \(\omega \in \Omega \). Let \({\mathcal {A}}_{\lambda ,\mu }\) be the global attractor of the local skewproduct flow \(\tau _{\lambda ,\mu }\) induced on \(\Omega \times {\mathbb {R}}\) by (6.4)\(_{\lambda ,\mu }\), with delimiter equilibria \(\alpha _{\lambda ,\mu }(\omega )=\inf ({\mathcal {A}}_{\lambda ,\mu })_\omega \) and \(\beta _{\lambda ,\mu }(\omega )=\sup ({\mathcal {A}}_{\lambda ,\mu })_\omega \), and let \(\textrm{sp}(f_x(\cdot ,0))=[-\lambda _+,-\lambda _-]\). We define
Notice that, for any fixed \(\lambda _1\le \lambda _+\), \(\textrm{sp}(f_x(\cdot ,0)+\lambda _1)=[\lambda _1-\lambda _+,\lambda _1-\lambda _-]\not \subset (0,\infty )\), which ensures that the bifurcation diagram for the \(\mu \)-parametric family (6.4)\(_{\lambda _1}\) is not that of Theorem 6.3(i) and hence that \({{\hat{\mu }}}(\lambda _1)\) is well defined. In addition, Theorem 3.1 ensures that \({{\hat{\lambda }}}\) is well defined and satisfies \({{\hat{\lambda }}}(\mu _1)\le \lambda _+\) in the three bifurcation cases which may arise for the \(\lambda \)-parametric family (6.4)\(_{\mu _1}\), for any \(\mu _1\in \mathbb R\).
Proposition 6.4
Let \({{\hat{\lambda }}}\) and \({{\hat{\mu }}}\) be the maps defined in (6.5). Then,
-
(i)
\({{\hat{\lambda }}}\circ {{\hat{\mu }}}=\textrm{Id}_{(-\infty ,\lambda _+]}\), and consequently, \({{\hat{\lambda }}}\) is onto.
-
(ii)
\({{\hat{\lambda }}}\) is nonincreasing, and consequently, \({{\hat{\lambda }}}\) is continuous.
Proof
-
(i)
We fix \(\lambda _0\in (-\infty ,\lambda _+]\) and call \(\mu _0={{\hat{\mu }}}(\lambda _0)\) and \({\overline{\lambda }}_0={{\hat{\lambda }}}(\mu _0)\). The goal is to check that \({\overline{\lambda }}_0=\lambda _0\). The definition of \(\mu _0\) ensures that the graph of \(\beta _{\lambda _0,\mu _0}\) does not define a hyperbolic \(\tau _{\lambda _0,\mu _0}\)-minimal set distinct from \({\mathcal {M}}_0\), so \(\lambda _0\le {\overline{\lambda }}_0\). By contradiction, we assume that \(\lambda _0<{\overline{\lambda }}_0\), and fix \(\lambda \in (\lambda _0,{\overline{\lambda }}_0)\). Observe that \(\mu _0\) is the upper bifurcation point of the diagram described by Theorem 6.3(ii) or (iii) for the \(\mu \)-family of (6.4)\(_{\lambda _0}\), and that, for any \(\epsilon >0\), the upper delimiter \(\beta _{\lambda _0,\mu _0+\epsilon }\) of \({\mathcal {A}}_{\lambda _0,\mu _0+\epsilon }\) is continuous and strictly positive. Then, if \(\epsilon \in (0,1)\) satisfies \(\epsilon <(\lambda -\lambda _0)/\sup _{\omega \in \Omega } \beta _{\lambda _0,\mu _0+1}(\omega )\), we have \(\lambda _0-\lambda +\epsilon \beta _{\lambda _0,\mu _0+\epsilon }(\omega )<0\) for all \(\omega \in \Omega \), and hence
$$\begin{aligned} \begin{aligned} \beta _{\lambda _0,\mu _0+\epsilon }'(\omega )&=f(\omega ,\beta _{\lambda _0,\mu _0+\epsilon }(\omega ))+\lambda _0\beta _{\lambda _0,\mu _0+\epsilon }(\omega )+(\mu _0+\epsilon )\beta _{\lambda _0,\mu _0+\epsilon }^2(\omega )\\&= f(\omega ,\beta _{\lambda _0,\mu _0+\epsilon }(\omega ))+\lambda \beta _{\lambda _0,\mu _0+\epsilon }(\omega )+\mu _0\beta _{\lambda _0,\mu _0+\epsilon }^2(\omega )\\&\quad +\beta _{\lambda _0,\mu _0+\epsilon }(\omega )(\lambda _0-\lambda +\epsilon \beta _{\lambda _0,\mu _0+\epsilon }(\omega ))\\&< f(\omega ,\beta _{\lambda _0,\mu _0+\epsilon }(\omega ))+\lambda \beta _{\lambda _0,\mu _0+\epsilon }(\omega )+\mu _0\beta _{\lambda _0,\mu _0+\epsilon }^2(\omega )\,. \end{aligned} \end{aligned}$$That is, \(\beta _{\lambda _0,\mu _0+\epsilon }\) is a global strict lower solution for (6.4)\(_{\lambda ,\mu _0}\). This ensures that \(0<\beta _{\lambda _0,\mu _0+\epsilon }<\beta _{\lambda ,\mu _0}\) (see Sect. 2.4), which in particular implies the existence of a strictly positive \(\tau _{\lambda ,\mu _0}\)-minimal set. But this is not possible: Theorem 3.1 and the definition of \({{\hat{\lambda }}}\) show that there is no \(\tau _{\lambda ,\mu _0}\)-minimal set above \({\mathcal {M}}_0\) if \(\lambda <{\overline{\lambda }}_0\). This contradiction shows that \({\overline{\lambda }}_0=\lambda _0\).
-
(ii)
By contradiction, we assume that there exist \(\mu _1<\mu _2\) such that \(\lambda _1={{\hat{\lambda }}}(\mu _1)<{{\hat{\lambda }}}(\mu _2)=\lambda _2\). We take \(\lambda \in (\lambda _1,\lambda _2)\). As \(\lambda >\lambda _1\), Theorem 3.1 and the definition of \(\lambda _1\) ensure that the upper delimiter \(\beta _{\lambda ,\mu _1}\) of \({\mathcal {A}}_{\lambda ,\mu _1}\) is continuous and strictly positive. Notice that
$$\begin{aligned} \begin{aligned} \beta '_{\lambda ,\mu _1}(\omega )&=f(\omega ,\beta _{\lambda ,\mu _1}(\omega ))+\lambda \beta _{\lambda ,\mu _1}(\omega )+\mu _2\beta ^2_{\lambda ,\mu _1}(\omega )+(\mu _1-\mu _2)\beta ^2_{\lambda ,\mu _1}(\omega )\\&<f(\omega ,\beta _{\lambda ,\mu _1}(\omega ))+\lambda \beta _{\lambda ,\mu _1}(\omega )+\mu _2\beta ^2_{\lambda ,\mu _1}(\omega )\,, \end{aligned} \end{aligned}$$so \(\beta _{\lambda ,\mu _1}\) is a global strict lower solution for (6.4)\(_{\lambda ,\mu _2}\). Therefore, \(0<\beta _{\lambda ,\mu _1}<\beta _{\lambda ,\mu _2}\) (see Sect. 2.4), which in particular implies the existence of a strictly positive \(\tau _{\lambda ,\mu _2}\)-minimal set. But the definition of \(\lambda _2\) ensures that \({\mathcal {M}}_0\) is the unique \(\tau _{\lambda ,\mu _2}\)-minimal set, since \(\lambda <\lambda _2\). Hence, \({{\hat{\lambda }}}\) is nonincreasing. Finally, a nondecreasing and onto function defined from an interval to an interval is always continuous.
\(\square \)
Corollary 6.5
Let \(\textrm{sp}(f_x(\cdot ,0))=[-\lambda _+,-\lambda _-]\) and \(\lambda _0\le \lambda _+\). The \(\lambda \)-parametric family
exhibits
-
the local saddle-node and transcritical bifurcations of Theorem 3.1(i) if \(\lambda _0<\lambda _-\), with \(\lambda _0\) as local saddle-node bifurcation point and \(\alpha _\lambda \) colliding with 0 as \(\lambda \downarrow \lambda _+\);
-
the classical pitchfork bifurcation of Theorem 3.1(ii) if \(\lambda _0=\lambda _+\), with unique bifurcation point \(\lambda _0\);
-
and the generalized pitchfork bifurcation of Theorem 3.1(iii) if \(\lambda _0\in [\lambda _-,\lambda _+)\), with \(\lambda _0\) as lower bifurcation point and \(\alpha _\lambda \) colliding with 0 as \(\lambda \downarrow \lambda _+\).
Proof
Proposition 6.4(i) ensures that \({{\hat{\lambda }}}({{\hat{\mu }}}(\lambda _0))=\lambda _0\). That is, \(\lambda _0=\inf \{\lambda \in {\mathbb {R}}:\) the graph of \(\beta _{\xi ,{{\hat{\mu }}}(\lambda _0)}\) defines a hyperbolic minimal set \({\mathcal {M}}_{\xi ,{{\hat{\mu }}}(\lambda _0)}^u\ne \Omega \times \{0\}\) for all \(\xi >\lambda \}\). The conclusions follow from the description of the three cases made in Theorem 3.1 applied to (6.6). \(\square \)
By taking the lower delimiters of the global attractors instead of the upper ones in (6.5), we get a result analogous to Corollary 6.5, with \(\beta _\lambda \) colliding with 0 at the upper bifurcations points.
Data availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Alonso, A.I., Obaya, R.: The structure of the bounded trajectories set of a scalar convex differential equation. Proc. R. Soc. Edinb. A 133(2), 237–263 (2003)
Anagnostopoulou, V., Jäger, T.: Nonautonomous saddle-node bifurcations: random and deterministic forcing. J. Differ. Equ. 253(2), 379–399 (2012)
Anagnostopoulou, V., Jäger, T., Keller, G.: A model for the nonautonomous Hopf bifurcation. Nonlinearity 28(7), 2587–2616 (2015)
Arnold, L.: Random Dynamical Systems. Springer, Berlin (1998)
Braaksma, B., Broer, H., Huitema, G.: Toward a quasi-periodic bifurcation theory. Memoirs Am. Math. Soc. 83(421), 83–175 (1990)
Campos, J., Núñez, C., Obaya, R.: Uniform stability and chaotic dynamics in nonhomogeneous linear dissipative scalar ordinary differential equations. Preprint (2021)
Campos, J., Obaya, R., Tarallo, M.: Favard theory for the adjoint equation and Fredholm alternative. J. Differ. Equ. 262(2), 749–802 (2017)
Caraballo, T., Langa, J., Obaya, R.: Pullback, forward and chaotic dynamics in 1D non-autonomous linear-dissipative equations. Nonlinearity 30(1), 274–299 (2017)
Carvalho, A., Langa, J., Robinson, J.: Attractors for infinite-dimensional non-autonomous dynamical systems. Appl. Math. Sci. 182, Springer, New York (2013)
Cornfeld, I.P., Fomin, S.V., Sinai, Ya..G..: Ergodic Theory. Springer, New York (1982)
Dueñas, J., Núñez, C., Obaya, R.: Bifurcation theory of attractors and minimal sets in d-concave nonautonomous scalar ordinary differential equations. J. Differ. Equ. 361(15), 138–182 (2023)
Fabbri, R., Johnson, R.: A nonautonomous saddle-node bifurcation pattern. Stoch. Dyn. 4(3), 335–350 (2004)
Fuhrmann, G.: Non-smooth saddle-node bifurcations III: strange attractors in continuous time. J. Differ. Equ. 261(3), 2109–2140 (2016)
Furstenberg, H.: Strict ergodicity and transformation of the torus. Am. J. Math. 83, 573–601 (1961)
Johnson, R., Obaya, R., Novo, S., Núñez, C., Fabbri, R.: Nonautonomous linear Hamiltonian systems: oscillation, spectral theory and control. Dev. Math. 36, Springer (2016)
Johnson, R.: Minimal functions with unbounded integral. Israel J. Math. 31(2), 133–141 (1978)
Johnson, R., Mantellini, F.: A nonautonomous transcritical bifurcation problem with an application to quasi-periodic bubbles. Discrete Contin. Dyn. Syst. 9(1), 209–224 (2003)
Johnson, R., Palmer, K., Sell, G.R.: Ergodic properties of linear dynamical systems. SIAM J. Math. Anal. 18(1), 1–33 (1987)
Jorba, À., Núñez, C., Obaya, R., Tatjer, J.C.: Old and new results on strange nonchaotic attractors. Int. J. Bifurc. Chaos 17(11), 3895–3928 (2007)
Kloeden, P.: Pitchfork and transcritical bifurcations in systems with homogeneous nonlinearities and an almost periodic time coefficient. Commun. Pure Appl. Anal. 3(2), 161–173 (2004)
Langa, J.A., Robinson, J.C., Suárez, A.: Bifurcations in non-autonomous scalar equations. J. Differ. Equ. 221(1), 1–35 (2006)
Mañé, R.: Ergodic theory and Differentiable Dynamics. Springer, Berlin (1987)
Novo, S., Núñez, C., Obaya, R.: Almost automorphic and almost periodic dynamics for quasimonotone non-autonomous functional differential equations. J. Dyn. Differ. Equ. 17(3), 589–619 (2005)
Núñez, C., Obaya, R.: Li–Yorke chaos in nonautonomous Hopf bifurcation patterns-I. Nonlinearity 32(10), 3940–3980
Núñez, C., Obaya, R.: A non-autonomous bifurcation theory for deterministic scalar differential equations. Discrete Contin. Dyn. Syst. Ser. B 9(3–4), 701–730 (2008)
Pliss, V.A.: Nonlocal Problems of the Theory of Oscillations. Harry Herman Academic Press, New York (1966)
Pötzsche, C.: Nonautonomous bifurcation of bounded solutions I: a Lyapunov–Schmidt approach. Discrete Contin. Dyn. Syst. Ser. B 14(2), 739–776 (2010)
Pötzsche, C.: Nonautonomous continuation of bounded solutions. Commun. Pure Appl. Anal. 10(3), 937–961 (2011)
Pötzsche, C.: Nonautonomous bifurcation of bounded solutions II: A shovel-bifurcation pattern. Discrete Contin. Dyn. Syst. 31(3), 941–973 (2011)
Rasmussen, M.: Attractivity and Bifurcation for Nonautonomous Dynamical Systems. Lecture Notes in Mathematics, vol. 1907. Springer, Berlin (2007)
Rasmussen, M.: Nonautonomous bifurcation patterns for one-dimensional differential equations. J. Differ. Equ. 234(1), 267–288 (2007)
Remo, F., Fuhrmann, G., Jäger, T.: On the effect of forcing of fold bifurcations and early-warning signals in population dynamics. Nonlinearity 35, 6485 (2022)
Sacker, R.J., Sell, G.R.: A spectral theory for linear differential systems. J. Differ. Equ. 27, 320–358 (1978)
Schwartzman, S.: Asymptotic cycles. Ann. Math. 66(2), 270–284 (1957)
Tineo, A.: A result of Ambrosetti–Prodi type for first-order ODEs with cubic non-linearities. I, II. Ann. Mat. Pura Appl. (4) 182(2), 113–128, 129–141 (2003)
Funding
Open Access funding provided thanks to the CRUE-CSIC agreement with Springer Nature.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
All the authors were supported by Ministerio de Ciencia, Innovación y Universidades (Spain) under project PID2021-125446NB-I00 and by Universidad de Valladolid under project PIP-TCESC-2020. J. Dueñas was supported by Ministerio de Universidades (Spain) under programme FPU20/01627.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Dueñas, J., Núñez, C. & Obaya, R. Generalized Pitchfork Bifurcations in D-Concave Nonautonomous Scalar Ordinary Differential Equations. J Dyn Diff Equat (2023). https://doi.org/10.1007/s10884-023-10309-8
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10884-023-10309-8