
Abstract
In this paper, the bifurcations of a modified Degasperis–Procesi equation are studied under different parametric conditions, which have not been investigated by the bifurcation theory of dynamical systems before. The existence of loop, periodic wave and smooth solitary wave solutions for the modified Degasperis–Procesi equation is proved, and exact expressions of corresponding traveling wave solutions are obtained.
Similar content being viewed by others

1 Introduction
The Degasperis–Procesi equation with the form
was discovered in [1], which is one of three integrable equations within a certain family of third-order nonlinear dispersive PDEs. It is a representative model for shallow water dynamics, so many scholars have investigated this equation by different methods (see [2,3,4,5,6,7]). The Degasperis–Procesi equation possesses smooth solutions that develop singularities in finite time by capturing the essential features of breaking waves [8], the solutions remain bounded, but their slopes become unbounded.
Recently, Lai et al. [9] studied the generalized Degasperis–Procesi equation
The objective of this work is to investigate the modified Degasperis–Procesi equation in the form [10]
where \(\alpha ,\beta \in R\), \(m\geq 2\), \(f(\phi )\) is a polynomial function of order n (\(n\geq 2\)). Setting \(\alpha =0\), \(\beta =4\), \(f( \phi )=\frac{\phi ^{2}}{2}\), Eq. (3) reduces to the Degasperis–Procesi equation (1).
In the present paper, \(\alpha =0\), \(f(\phi )=\phi ^{n}\), \(n\in Z^{+}\) is considered, and then Eq. (3) becomes
by substituting the traveling wave transformation \(\phi (x,t)=\phi (x-ct)= \phi (\xi )\), where c is the wave speed. Integrating once and neglecting the integral constant, the partial differential equation (4) changes to the following ordinary differential equation:
Equation (5) is equivalent to the two-dimensional system as follows:
with the first integral being
Obviously, Eq. (5) is a three-parameter planar dynamical system depending on the parameter triplet \((c,\beta ,n)\). Since the phase orbits defined by the vector fields of Eq. (5) determine all traveling wave solutions of Eq. (4), we will investigate the bifurcations of phase portraits of Eq. (5) in the phase plane \((\phi ,y)\) when the parameters \((c,\beta ,n)\) change. For the given physical model, we aim to find the bounded solutions of Eq. (5) which are meaningful in physics.
Suppose that \(\phi (\xi )\) is a continuous solution of (6) for \(\xi \in (-\infty ,+\infty )\) and \(\lim_{\xi \rightarrow -\infty } \phi (\xi )=\alpha \) as well as \(\lim_{\xi \rightarrow +\infty } \phi (\xi )=\beta \). If \(\alpha =\beta \), \(\phi (x,t)\) is called a solitary wave solution. If \(\alpha \neq \beta \), \(\phi (x,t)\) is called a kink (anti-kink) wave solution. A solitary wave solution corresponds to a homoclinic orbit, a kink (anti-kink) wave solution corresponds to a heteroclinic orbit, a periodic orbit corresponds to a periodic traveling wave solution.
This paper is organized as follows. In Sect. 2, we discuss the bifurcations of phase portraits of system (6) under different parameter conditions. In Sect. 3, we prove the existence of solitary wave, periodic, and loop solutions of (6). A brief conclusion is given in Sect. 4.
2 Bifurcations of phase portraits of (6) and (8)
In this section, the phase portraits of Eq. (6) will be considered. First, let \(d\tau =(c-n\phi ^{n-1})\,d\xi \), then Eq. (6) becomes
Obviously, Eq. (8) has the same topological phase portraits as Eq. (6) except for the straight line \(c-n\phi ^{n-1}=0\), and Eqs. (8) and (6) are integrable, which have the same first integral as (7). For a fixed h, (7) determines a set of invariant curves of (8), which contains different branches of curves. As h is varied, (7) defines different families of orbits of (8) with different dynamical behaviors.
Denoting \(F(\phi )=c\phi -\beta \phi ^{n}\), to investigate the critical points of the system, we need to find all zeros of the equation \(F(\phi )=0\). In the \((\phi ,y)\)-phase plane, the abscissas of equilibrium points of Eq. (6) on the ϕ-axis are the zeros of \(F(\phi )\). Notice that \(F^{\prime }(\phi )=c-\beta n\phi ^{n-1}\), for an odd n and \(c\beta >0\), \(F^{\prime }(\phi )\) has two zeros \(\phi _{\pm }=\pm (\frac{c}{\beta n})^{\frac{1}{n-1}}\); for an even n, \(F^{\prime }(\phi )\) has one zero \(\phi _{+}=(\frac{c}{\beta n})^{ \frac{1}{n-1}}\). Then the distribution of the zeros of \(F(\phi )\) on the ϕ-axis is presented. For an odd n, there exist three equilibrium points of Eq. (8) at \(O(0,0)\) and \(E(\phi _{a,b},0)\) when \(c\beta >0\), where \(\phi _{a}=(\frac{c}{\beta n})^{\frac{1}{n-1}}\), \(\phi _{b}=-(\frac{c}{ \beta n})^{\frac{1}{n-1}}\). For an even n, there exist two equilibrium points of \(O(0,0)\) and \(E(\phi _{c},0)\), where \(\phi _{c}=(\frac{c}{ \beta n})^{\frac{1}{n-1}}\).
Let \(E(\phi _{i},0)\) be an equilibrium point of (8) and \(M(\phi _{i},0)\) be the coefficient matrix of the linearized system of Eq. (8) at an equilibrium point \(E(\phi _{i},0)\). We obtain
By the theory of planar dynamical systems, the equilibrium point \(E(\phi _{i},0)\) of the Hamiltonian system is a center if \(J(\phi _{i},0)> 0\); \(E(\phi _{i},0)\) is a saddle if \(J(\phi _{i},0)< 0\); while if \(J(\phi _{i},0)=0\) and Poincaré index of this equilibrium point is zero, then \(E(\phi _{i},0)\) is a cusp.
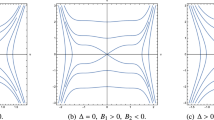
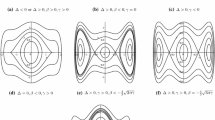
From the analysis above, we obtain the different phase portraits of Eq. (6) shown in Fig. 1.

Phase portraits of (8) under different parameter conditions, for \(m\in Z^{+}\) and \(m\geq 1\)
3 Some exact traveling wave solutions of (6) and (8)
In this section, we will use the phase portrait analytical technique [11,12,13,14,15,16,17,18,19,20,21] to get smooth solitary, loop and periodic wave solutions under some conditions.
1. If \(n=2\), we notice that the curves defined by \(H(\phi ,y)=h=0\) correspond to the orbits consisting of two stable manifolds, two unstable manifolds of the saddle point \(O(0,0)\) and two open curves passing through the points \((\phi _{c}, 0)\), respectively (see the red orbits in Fig. 1-6). From Eq. (7), it is obvious that the arch curve on the left-hand side of the straight line \(\phi =\frac{c}{2}\) has the algebraic equation
where \(\phi _{1,2}=\frac{c(2+\beta )}{3}\pm \frac{c}{3}\sqrt{\beta ^{2}-5\beta +4}\). By Eq. (9) and the above standard phase portrait analysis, integrating along the stable and unstable manifolds, approaching the straight line \(\phi =\frac{c}{2}\) to the saddle point \(O(0,0)\) and two open curves passing through the points \((\phi _{2},0)\), we obtain the following representations:
and
where \(\eta _{1}(\phi )=\frac{c-2\phi }{\sqrt{-\beta }\phi \sqrt{( \phi _{1}-\phi )(\phi -\phi _{2})}}\), \(\varPhi _{1}(\phi )=\frac{c}{\sqrt{- \phi _{1}\phi _{2}}}\cosh ^{-1} (\frac{\phi _{1}+\phi _{2}-\frac{2\phi _{1}\phi _{2}}{\phi }}{\phi _{1}-\phi _{2}} )\), and \(\varPhi _{2}( \phi )= 2 \arcsin (\frac{2\phi -\phi _{1}-\phi _{2}}{\phi _{1}-\phi _{2}})\). Employing (10) and (11), we obtain a loop solution.
Remark
The loop solution is a solitary wave solution with a singularity, which possesses infinite derivatives at certain points, and consist of two or more independent branches. The loop solution illustrated in (10) and (11) may be regarded as a composite solution made up of three single-valued solutions. The notion of composite solutions for the Camassa–Holm equation is discussed in detail in [15,16,17,18,19].
2. If \(n=2\), we notice that the curves defined by \(H(\phi ,y)=h\in (h _{1},0)\) corresponding to a family of periodic orbits (see the blue orbits in Fig. 1-6). Under this condition, the algebraic equation is obtained as follows:
where \(\phi _{3}<\phi _{4}<0<\phi _{5}<\phi _{6}\), and \(\phi _{3}=-\phi _{5}\), \(\phi _{4}=-\phi _{6}\). Thus, we have parametric representations for the family of periodic solutions as follows:
where \(\varphi =\arcsin \sqrt{\frac{(\phi _{5}-\phi _{3})(\phi _{6}- \phi )}{(\phi _{6}-\phi _{5})(\phi -\phi _{3})}}\), \(k^{2}=\frac{(\phi _{6}-\phi _{5})(\phi _{4}-\phi _{3})}{(\phi _{6}-\phi _{4})(\phi _{5}-\phi _{3})}\); \(F(\varphi ,k)\) and \(\varPi (\varphi ,\frac{\phi _{5}-\phi _{6}}{ \phi _{5}-\phi _{3}},k)\) are the Legendre’s incomplete elliptic integrals of the first and third kind, respectively (see [22]).
3. If \(n=3\), we notice that the curves defined by \(H(\phi ,y)=h=0\) correspond to two homoclinic orbits passing through the saddle point \(O(0,0)\) (see the red orbits in Fig. 1-5). Under this condition, the algebraic equation is obtained as follows:
where \(z_{i}\) (\(i=1-4\)) are complex numbers, \(z_{2}\) is conjugate to \(z_{1}\), and \(z_{4}\) is conjugate to \(z_{3}\). Thus, by using the first equation of (6) and Eq. (14), we obtain the parametric representation of two homoclinic orbits:
where \(\omega _{1}=\frac{gc\alpha (1+g_{1}\alpha )}{(a_{1}+b_{1}g_{1})(1+ \alpha ^{2})}- \frac{3g(b_{1}-a_{1}g_{1})(1+\alpha g_{1})}{(1+g_{1}^{2})}\), \(\omega _{2}=\frac{gc\alpha ^{2}(\alpha -g_{1})}{(a_{1}+b_{1}g_{1})(1+ \alpha ^{2})}\), \(\omega _{3}=\frac{3gg_{1}^{2}(b_{1}-g_{1}a_{1})(g_{1}- \alpha )}{g_{1}(1+g_{1}^{2})}\), and \(\omega _{4}=\frac{\alpha gc( \alpha -g_{1})}{a_{1}+b_{1}g_{1}}-\frac{3g_{1}(b_{1}-g_{1}a_{1})(g _{1}-\alpha )}{g_{1}}\). It gives rise to two smooth solitary solutions. The details of the computation can be seen in Appendix.
4. If \(n=3\), the curves defined by \(H(\phi ,y)=h=0\) correspond to different orbits of Eq. (8) consisting of two stable manifolds, two unstable manifolds of the saddle point \((0,0)\), and two open curves passing through the points \((\phi _{a}, 0)\) (see the red orbits in Fig. 1-7). On the right-hand side of the vertical axis, from Eq. (7), the arch curve on the right-hand side of the straight line \(\phi =( \frac{c}{3})^{\frac{1}{2}}\) is
where \(\phi _{7}\), \(\phi _{8}\) are real numbers, \(z_{5}\), \(z_{6}\) are complex numbers, and \(\phi _{7}>\phi _{8}\), \(z_{6}\) is conjugate to \(z_{5}\). By Eq. (16) and the above standard phase portrait analysis, integrating along the stable and unstable manifolds, approaching the straight line \(\phi =(\frac{c}{3})^{\frac{1}{2}}\) to the saddle point \(O(0,0)\) and the open-end curve passing through the points \((\phi _{c},0)\), integrating on the intervals \([0,\phi )\) and \((\phi ,\frac{\phi _{c}}{2}]\), we obtain the following representations:
where \(\eta _{2}(\phi )=\frac{c-3\phi ^{2}}{\sqrt{\beta }\phi \sqrt{( \phi -\phi _{7})(\phi -\phi _{8})(\phi -z_{5})(\phi -z_{6})}}\), \(\varphi _{2}=\arccos (\frac{(A-B)\phi +\phi _{7}B-\phi _{8}A}{(A+B) \phi -\phi _{7}B-\phi _{8}A})\), \(A^{2}=(\phi _{7}-b_{1})^{2}+a_{1}^{2}\), \(B^{2}=(\phi _{8}-b_{1})^{2}+a_{1}^{2}\), \(k_{2}^{2}=\frac{(A+B)^{2}-( \phi _{7}-\phi _{8})}{4AB}\), \(\omega _{5}=\frac{cg_{2}\alpha _{2}(B-A)}{ \phi _{7}B+\phi _{8}A}- \frac{3g_{2}\alpha _{1}(\phi _{7}B-\phi _{8}A)}{A+B}\), \(\omega _{6}=\frac{cg _{2}(B-A)(\alpha _{1}-\alpha _{2})}{(\phi _{7}B+\phi _{8}A)(1-\alpha _{1} ^{2})}\), \(\omega _{7}=-\frac{3g_{2}(\phi _{7}B-\phi _{8}A)(\alpha _{2}- \alpha _{1})}{(A+B)(1-\alpha _{2}^{2})}\), \(\omega _{8}=-\frac{\alpha _{1}cg _{2}(B-A)(\alpha _{1}-\alpha _{2})}{(\phi _{7}B+\phi _{8}A)(1-\alpha _{1} ^{2})}\sqrt{\frac{1-\alpha _{1}^{2}}{k_{2}^{2}+(1-k_{2}^{2})\alpha _{1}^{2}}}\), and \(\omega _{9}=\frac{3\alpha _{2}g_{2}(\phi _{7}B-\phi _{8}A)(\alpha _{2}-\alpha _{1})}{(A+B)(1-\alpha _{2}^{2})} \sqrt{\frac{1- \alpha _{2}^{2}}{k_{2}^{2}+(1-k_{2}^{2})\alpha _{2}^{2}}}\). It gives rise to a loop solitary solution like in (10) and (11). Paralleling with the orbits on the right-hand side of the vertical axis, another loop solution can be found which consists of orbits on the left-hand side of the y-axis in Fig. 1-7.
4 Conclusion
In summary, we have obtained the bifurcations of the parameters and proved the existence of some exact traveling wave solutions for the modified Degasperis–Procesi equation, with the aid of dynamical systems theory. We have shown that modified Degasperis–Procesi equation has smooth solitary wave solutions, periodic wave solutions and loop solitary solutions under some parameter conditions.
References
Degasperis, A., Procesi, M.: Asymptotic integrability. In: Degasperis, A., Gaeta, G. (eds.) Symmetry and Perturbation Theory, pp. 23–37. World Scientific, Singapore (1999)
Lenells, J.: Travelling wave solutions of the Degasperis–Procesi equation. J. Math. Anal. Appl. 306, 72–82 (2005)
Lundmark, H., Szmigeilski, J.: Multi-peakon solutions of the Degasperis–Procesi equation. Inverse Probl. 19, 1241–1245 (2003)
Shen, J., Xu, W.: Bifurcations of smooth and non-smooth travelling wave solutions of the Degasperis–Procesi equation. Int. J. Nonlinear Sci. Numer. Simul. 5, 397–402 (2004)
Wang, M., Yu, S.: An interacting system of the Camassa–Holm and Degasperis–Procesi equations. J. Math. Phys. 53, 60–91 (2012)
Sun, X.: Perturbation of a period annulus bounded by a heteroclinic loop connecting two hyperbolic saddles. Qual. Theory Dyn. Syst. 16, 1–17 (2016)
Yu, L., Tian, L., Wang, X.: The bifurcation and peakon for Degasperis–Procesi equation. Chaos Solitons Fractals 30, 956–966 (2006)
Whitham, G.B.: Linear and Nonlinear Waves. Wiley, New York (1974)
Lai, S., Yan, H., Chen, H., Wang, Y.: The stability of local strong solutions for a shallow water equation. J. Inequal. Appl. 410, 410–423 (2014)
Chen, J.: A study on the stability of a modified Degasperis–Procesi equation. Cogent Math. 3, 1251875 (2016)
Li, J., Dai, H.: On the Study of Singular Nonlinear Traveling Wave Equations. Science Press, Beijing (2007)
Seadawy, A.R.: Solitary wave solutions of two-dimensional nonlinear Kadomtsev–Petviashvili dynamic equation in dust-acoustic plasmas. Pramana J. Phys. 89, 1–11 (2017)
Seadawy, A.R.: Two-dimensional interaction of a shear flow with a free surface in a stratified fluid and its solitary-wave solutions via mathematical methods. Eur. Phys. J. Plus 132, 518 (2017)
Seadawy, A.R., Lu, D., Khater, M.M.A.: Solitary wave solutions for the generalized Zakharov–Kuznetsov–Benjamin–Bona–Mahony nonlinear evolution equation. J. Ocean Eng. Sci. 16, 37–41 (2017)
Meng, Q., He, B.: Notes on “Solitary wave solutions of the generalized two-component Hunter–Saxton system”. Nonlinear Anal. 103, 33–38 (2014)
He, B., Meng, Q.: Notes on “Different kinds of exact solutions with two-loop character of the two-component short pulse equations of the first kind”. Commun. Nonlinear Sci. Numer. Simul. 19, 1247–1255 (2014)
Meng, Q., Li, W., He, B.: Smooth and peaked solitary wave solutions of the Broer–Kaup system using the approach of dynamical system. Commun. Theor. Phys. 62, 308–314 (2014)
He, B., Meng, Q.: Explicit kink-like and compacton-like wave solutions for a generalized KdV equation. Nonlinear Dyn. 82, 703–711 (2015)
He, B., Meng, Q.: Three kinds of periodic wave solutions and their limit forms for a modified KdV-type equation. Nonlinear Dyn. 86, 811–822 (2016)
He, B., Meng, Q.: Explicit exact periodic wave solutions and their limit forms for a long waves–short waves model. J. Appl. Anal. Comput. 4, 1503–1533 (2017)
Wei, M., Sun, X., Zhu, H.: Bifurcations of traveling wave solutions for a generalized Camassa–Holm equation. J. Appl. Anal. Comput. 6, 1851–1862 (2018)
Byrd, P., Friedman, M.: Handbook of Elliptic Integrals for Engineers and Scientists. Springer, Berlin (1971)
Acknowledgements
The author is thankful to the referees for helpful comments on this article.
Funding
This work was supported by National Natural Science Foundation of China (No. 41461110, 11461001) and Guangxi College Enhancing Youths Capacity Project (KY2016LX315, KY2016YB404).
Author information
Authors and Affiliations
Contributions
The author read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The author declares that there is no conflict of interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Equatio (14) can be rewritten as
thus, we can obtain
1. From 267.02, 342.02 and 342.03 in [22],
where \(f_{2}\) defined by 361.64 in [22] is
2. From 267.01, 342.02 and 342.03 in [22],
where \(a_{1}^{2}=-\frac{(z_{1}-z_{2})^{2}}{4}\), \(b_{1}=\frac{z_{1}+z _{2}}{2}\), \(a_{2}=-\frac{(z_{3}-z_{4})^{2}}{4}\), \(b_{2}=\frac{z_{3}+z _{4}}{2}\),
Hence, from the computation above, Eq. (15) is obtained.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wei, M. Bifurcations and exact traveling wave solutions for a modified Degasperis–Procesi equation. Adv Differ Equ 2019, 126 (2019). https://doi.org/10.1186/s13662-019-2007-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2007-6