
Abstract
Electromagnetic (EM) imaging aims to produce large-scale, high-resolution soil conductivity maps that provide essential information for Earth subsurface exploration. To rigorously generate EM subsurface models, one must address both the forward problem and the inverse problem. From these subsurface resistivity maps, also referred to as volumes of resistivity distribution, it is possible to extract useful information (lithology, temperature, porosity, permeability, among others) to improve our knowledge about geo-resources on which modern society depends (e.g., energy, groundwater, and raw materials, among others). However, this ability to detect electrical resistivity contrasts also makes EM imaging techniques sensitive to metallic structures whose EM footprint often exceeds their diminutive stature compared to surrounding materials. Depending on target applications, this behavior can be advantageous or disadvantageous. In this work, we review EM modeling and inverse solutions in the presence of metallic structures, emphasizing how these structures affect EM data acquisition and interpretation. By addressing the challenges posed by metallic structures, our aim is to enhance the accuracy and reliability of subsurface EM characterization, ultimately leading to improved management of geo-resources and environmental monitoring. Here, we consider the latter through the lens of a triple helix approach: physics behind metallic structures in EM modeling and imaging, development of computational tools (conventional strategies and artificial intelligence schemes), and configurations and applications. The literature review shows that, despite recent scientific advancements, EM imaging techniques are still being developed, as are software-based data processing and interpretation tools. Such progress must address geological complexities and metallic casing measurements integrity in increasing detail setups. We hope this review will provide inspiration for researchers to study the fascinating EM problem, as well as establishing a robust technological ecosystem to those interested in studying EM fields affected by metallic artifacts.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Article Highlights
-
Forward and inverse modeling of steel wells remains a challenging task from a computational and numerical perspective
-
Better understanding of EM fields near metallic artifacts is needed for efficient geo-resources exploration and management
-
Diverse numerical methods, meshing approaches, and computational strategies enhance EM modeling and imaging with metallic artifacts
-
For EM modeling and imaging with metallic structures, a multidisciplinary approach is vital
1 Introduction
Geophysical imaging, a branch of geophysics, is focused on studying images of the Earth’s interior. EM imaging techniques aim to produce large-scale high-resolution soil maps that can provide essential information for de-risk any applications focusing on geo-resource exploration. The rigorous generation of EM subsurface models requires solving the forward problem and the inverse problem. In the forward problem, also referred to as forward modeling, synthetic EM fields of the subsurface are computed. Then, in the inverse problem, forward modeling EM responses are iteratively approximated to the real EM data. EM forward modeling is typically a nonlinear mapping, and EM inversion is a nonlinear approximation, which belongs to mathematical regression problems. To maintain clarity throughout this paper, we adopt the term “modeling” to denote the forward problem and employ “imaging” to signify the inverse problem. Furthermore, we consider the EM “footprint” as the spatial distribution and characteristics of the EM response generated by subsurface structures.
Nowadays, EM surveys, both aerial and ground-based, are widely used methods for subsurface exploration. They have been perfected for hydrocarbon exploration as they enable the detection of conductivity contrasts resulting from variations in lithology or fluid properties (Newman and Alumbaugh 1997; Eidesmo et al. 2002; Avdeev 2005; Constable 2006; Srnka et al. 2006; Orange et al. 2009; Constable 2010). The same technological tools, however, can be deployed to detect either minerals or fluids and to monitor their migration. Given its transversality, EM modeling and imaging are widely used in other geophysical near-surface prospecting scenarios, such as mineral and resource mining (Sheard et al. 2005; Queralt et al. 2007; Yang and Oldenburg 2012), \(\text {CO}_{2}\) storage characterization (Girard et al. 2011; Vilamajó et al. 2013), geothermal reservoir imaging and characterization (Piña-Varas et al. 2015; Coppo et al. 2016), crustal conductivity studies (Hördt et al. 1992, 2000; Ledo et al. 2002; Campanyà et al. 2012), and hydrogeological (Chambers et al. 2006; Chang et al. 2017; Zhang et al. 2016), among others.
Combined with an exponential growth in computer performance in the last decade, our capacity to transform EM data into more accurate 3D resistivity distribution maps can now be massively deployed. EM modeling and imaging are carried out by complex algorithms running in both modest and high-performance computers (HPC). These simulation tools allow us to reproduce different Earth medium’s response to external excitation and analyze observed data to infer 3D subsurface resistivity models as correct as possible. The advancement of 3D EM modeling routines has seen significant progress in recent years. Examples of such codes include SimPEG (Heagy et al. 2017), emg3d (Werthmüller 2017), PETGEM (Castillo-Reyes et al. 2018), and custEM (Rochlitz et al. 2019). It is worth noting that these referenced codes share the common feature of being open source. These EM modeling algorithms have been proved to validate 3D geological models by direct comparison between data and synthetics in different application fields.
Such EM modeling routines can be employed to analyze 3D land-based realistic configurations in the presence of metallic infrastructures such as power networks (Wirianto et al. 2010), pipelines (Klanica et al. 2023), railways (Pádua et al. 2002; Qi 2023), industrial facilities, and wells, among others. The assessment of EM fields in the presence of metallic artifacts has gained attention recently, and several numerical and computational schemes have been studied in different scenarios. Since metallic structures alter the EM field pattern of deep targets, their study in the realm of geo-electromagnetic modeling is fundamental to avoid erroneous or incomplete interpretations. Regardless the numerical scheme or application context, these fundamental research works have demonstrated that the presence of metallic structures in the modeling can be beneficial for generating accurate 3D EM maps (e.g., improving the signal-to-noise ratio, helping to channel currents to depths much greater). In this domain, pioneer works based on analytical or semi-analytic approaches (Wait 1972; Wait and Hill 1973; Kaufman 1990; Kong et al. 2009; Cuevas 2014) have still a great value as a validation of the numerical methods and solutions, and as a tool to better understand the physics behind the distortion of EM fields due to metallic structures. More recently, works in this line include those presented by Cuevas (2022) and Cuevas (2024), offering insights on the topic.
The realistic numerical solution for 3D resistivity models with embedded metallic structures is a challenging issue for two main reasons. First, dealing with high electrical conductivity and magnetic permeability contrast embedded in geological materials, as well as metallic artifacts and wells, produces ill-conditioned linear systems. Second, to accurately capture the footprint of EM fields when large-scale variations (e.g., ranging from cm to km) are present, we require different resolution levels of discretization. As a result, modeling and imaging routines demand efficient meshing strategies to incorporate these metallic structures while using as few mesh elements as possible. Nonetheless, although numerically challenging, 3D geo-electromagnetic modeling and imaging in the presence of realistic metallic artifacts is feasible given the recent improvement in numerical methods and computing power. Out of these studies, the works by Um et al. (2015), Vilamajó et al. (2015), Puzyrev et al. (2017), Heagy et al. (2017), Cuevas and Pezzoli (2018), Wilt et al. (2020), and Castillo-Reyes et al. (2021) stand out.
In this paper, we review the state-of-the-art developments for EM modeling and imaging in the presence of metallic-cased wells. While our analysis primarily focuses on vertical metal casings, we also discuss other metallic infrastructures, for which most of the conclusions derived from this review remain valid. The paper’s contribution is threefold. First, we examine the physical insights behind metallic artifacts in 3D geo-electromagnetic modeling and imaging from a general perspective. Here, we discuss the physical implications of metallic artifacts on EM footprint. Second, we study the development of algorithms (numerical methods and computational schemes) to generate accurate 3D resistivity distribution maps of the subsurface. Pros and cons of each technique and technological gaps to specific problems are discussed. Thirdly, we examine successful applications of these methods reported in the literature for this analysis. Here, we focus the analysis on two aspects: (i) The effects or disturbances on EM responses measured at deployed stations and (ii) the effects of metallic structures that act as a source/transmitter. Drawing from our literature review, we discuss tailoring schemes to suit application needs and address future challenges in this context.
2 Insights of Metallic Structures in EM Imaging
EM modeling and imaging tools play a key role in investigating, analyzing, and interpreting subsurface electric resistivity distribution. These computational routines are widely exploited for characterization and monitoring of energy reservoirs (e.g., oil, gas, and geothermal), imaging of geologic storage (e.g., CO\(_2\) sequestration), and freshwater reservoir prospecting through mapping resistivity variations. EM data acquisition is inexpensive and has a small footprint in the terrain in comparison with seismic methods. As a drawback, the diffusive nature of EM responses limits the resolution of the obtained volumes of resistivity distribution. Accordingly, EM data are commonly employed as complement to seismic datasets (Harris and MacGregor 2006; Eidsvik et al. 2008; Hansen and Mittet 2009; Harris et al. 2009; Du and MacGregor 2010; Tveit et al. 2020).
Because regions of interest are usually urbanized and industrialized areas, it is expected that metallic infrastructures are present in the vicinity of EM transmitters or receivers. This setting yields a distortion of EM fields recorded at receivers. Therefore, studying this behavior is crucial to avoid misinterpretation of resistivity models. Recent examples stress this phenomenon in EM modeling and imaging include Um et al. (2015); Vilamajó et al. (2016); Heagy et al. (2017); Park et al. (2017); Reeck et al. (2020); Um et al. (2020); Castillo-Reyes et al. (2021); Heagy and Oldenburg (2022); Orujov et al. (2022a); Heagy and Oldenburg (2023). Regardless of the numerical scheme or application contexts, the authors identify two critical aspects of EM modeling affected by metallic structures: (i) modeling complexity from a numerical perspective and (ii) physical behavior and its impact on EM imaging quality. Below we discuss each aspect separately.
-
(i)
Numerical complexity: Modeling steel wells remains a challenging task from a numerical perspective. The large-scale variations of structures range from cm to km and their conductivity values are million times more conductive than geologic features, making conventional EM imaging routines unsuitable to face these problems. With recent modeling advancements and HPC readily accessible, there is renewed interest in facing and understanding the physical behavior of resistivity models containing metallic structures. As a consequence, a considerable number of EM routines have been developed to handle such modeling tasks in recent years (Um et al. 2015; Yang et al. 2016; Heagy et al. 2017; Puzyrev et al. 2017; Weiss 2017; Castillo-Reyes et al. 2018; Kohnke et al. 2018; Orujov et al. 2020; Hu and Yang 2021). The capacities and limitations of state-of-the-art EM modeling are discussed further in Sect. 3.
-
(ii)
Physical behavior and influence on EM fields The contrast in electric and magnetic properties between metallic infrastructure and geological materials results in two main effects: galvanic and inductive. Galvanic effects involve changes in charge density at boundaries and induced currents along metallic structures. These effects intensify when active dipoles are near or within the structure, particularly when the source is at the base of a metallic casing Cuevas (2022, 2024). Since steel structures are highly conductive, it is recommended not to place transmitters and measurement stations in the vicinity of metallic artifacts to avoid distortions Grayver et al. (2013); Um et al. (2020). However, and depending on the target and the setups, the signal-to-noise ratios in such modeling regions can be improved by the presence of steel structures (Vilamajó et al. 2015, 2016; Puzyrev et al. 2017; Cuevas and Pezzoli 2018; Anderson 2019; Wilt et al. 2020; Castillo-Reyes et al. 2021). Some studies attempt to address this issue through post-processing (Siemon et al. 2011; Reeck et al. 2020) or aim to mitigate their influence through careful survey design (Swidinsky et al. 2013). Furthermore, the modeling of metallic structures can improve our capacities to detect and image deep localized targets (Sill and Ward 1978; Schenkel and Morrison 1990; Yang et al. 2009; Colombo and McNeice 2013; Tietze et al. 2015; Um et al. 2015; Heagy and Oldenburg 2022). The impact of metallic structures on EM imaging is discussed in more detail in Sect. 4.
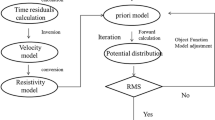
Given the points mentioned above, assessment of EM responses under the presence of metallic wells continues to be of difficulty and interest of the scientific community. Figure 1 displays the evolution of EM modeling from a holistic perspective. The relevance of this figure comes from placing the events that played a significant role in shaping the understanding of EM imaging in the presence of metallic wells. This graphical synthesis of the evolutionary process of EM modeling strategies is helpful for observing the influence of numerical methods, parallel solvers and data storage system advancement, availability of high-quality datasets, and, more recently, artificial intelligence solutions. In the following sections, we focus on completing our review in these relevant aspects as well.

Visual history of EM imaging based on this literature review
3 Development of Geo-Electromagnetic Algorithms
3D EM imaging algorithms are of great interest in designing survey layouts for understanding and verifying experimental measurements with the purpose of EM data inversion. These simulation tools are instrumental for understanding physical responses and assessing the target detectability of great interest in several diverse applications. Consequently, the development of 3D EM imaging algorithms has increased in the last decades. The net result of this effort is a diverse set of available tools to solve the EM forward/inverse problem in the presence of steel artifacts. This section describes the state-of-the-art developments for EM imaging with embedded metallic structures. We focus our analysis on the three main EM imaging topics: numerical schemes, gridding, and computational aspects.
3.1 Numerical Strategies
Maxwell’s equations govern the EM forward modeling in their diffusive form both in time domain or frequency domain (Zhdanov 2009). Several techniques for solving these fundamental equations have been developed. These numerical developments are based on four major approaches: finite differences (FD; (Mackie et al. 1994; Newman and Alumbaugh 2002; Davydycheva et al. 2003)), finite volumes (FV; (Hermeline 2009; Jahandari and Farquharson 2014)), finite elements (FE; (Jin 2015; Um et al. 2013; Key and Ovall 2011)), and integral equations (IE; (Raiche 1974; Wannamaker et al. 1984; Wannamaker 1991; Xiong and Tripp 1997)). We refer to Avdeev et al. (2002), Avdeev (2005), Börner (2010), and Pankratov and Kuvshinov (2016) for comprehensive reviews of numerical method developments for geo-electromagnetic modeling. Below we discuss the most relevant aspects of each numerical scheme within the context of EM imaging in the presence of metallic infrastructures and wells.
3.1.1 Finite Difference (FD) Scheme
The FD scheme for EM modeling was introduced by Yee (1966). Ward and Hohmann (1988) and Shlager and Schneider (1995) illustrate their rapid growth for solving Maxwell’s equations in the 1970 s and 1980 s. Druskin and Knizhnerman (1994), Mackie et al. (1994), and Gandi (1998) also develop and promote FD schemes in the 1990 s. After that, several works have been published dealing with FD schemes for forward and inverse problem in geo-electromagnetics (Alumbaugh et al. 1996; Newman and Alumbaugh 2002; Davydycheva et al. 2003; Streich 2009). The popularity of FD for EM imaging and inversion is due to its relatively straightforward computational implementation and fairly simple geometry handling. In addition, the structured nature of FD codes can be implemented efficiently on vector architectures which makes feasible solving realistic and complex problems on HPC. However, the main FD drawbacks is the inability to work on unstructured grids. Therefore, stair-case gridding strategies are needed to represent complex geological bodies, curved objects/boundaries, or other small geometrical details. As a result, mesh sizes can quickly increase when model regions do not fit rectangular meshes. This is particularly evident in cases such as models featuring realistic topography or bathymetry or those containing bodies of varying spatial scales (e.g., commonly in EM imaging when metallic infrastructures/wells are presented). It is worth mentioning that octree grids (semi-unstructured meshes) offer more flexibility by dividing the hexahedral elements close to the refinement region into smaller cells (Grayver and Bürg 2014). However, this approach is restricted at some point due to regular meshes limitations (Haber and Heldmann 2007b; Jahandari et al. 2017).
The FD method has been applied to study resistivity models with embedded metallic structures despite its spatial discretization limitations. Wilt and Alumbaugh (2003) present a review of successful case studies of two non-traditional EM techniques for characterization and monitoring of energy reservoirs (e.g., oil and geothermal). Furthermore, the authors present the potential of EM imaging for water flood tasks. Synthetic EM data were modeled and inverted to build 2D resistivity maps and study the pattern of EM fields in the vicinity of the metallic borehole. This work establishes that imaging and inversion of EM data could reveal helpful information about the reservoir and its content. Commer et al. (2015) presents a FD time-domain algorithm to compute EM responses in the presence of highly conductive steel infrastructure. The authors revisited the literature and proposed an approach to use large time steps in comparison with previous works, alleviating the generally high computational cost (e.g., the typical approach is to use small time steps on an extremely fine mesh). To validate FD method, Commer et al. (2015) carried out simulations for hydraulic fracturing studies and demonstrate the potential of metallic-cased boreholes to illuminate deep target zones. Later, Puzyrev et al. (2017) introduce a full 3D and parallel FD scheme to investigate the metallic-cased well effect and its applicability on the borehole-to-surface configuration of the Hontomín CO\(_2\) storage site (experimental site located in the North of Spain). Here, different setups (e.g., source position, resistivity model, steel-cased dimensions) were studied. The numerical EM responses show a good agreement with real field data. Although the used FD mesh is extremely fine, the authors report considerable improvements in computational cost due to the capacities of massively parallel computations. More recently, Wilt et al. (2020) employ a FD method to investigate the metallic-cased borehole integrity. By studying the continuity of electrical current flow, the authors were able to analyze the properties of the steel wellbore in different conditions (e.g., transmitter position, resistivity distributions, fluid used during drilling). The applicability of this method is evident for subsurface resource extraction, energy storage, and hazardous waste disposal.
Regardless of the application context, the authors of the mentioned FD approaches highlight two aspects to discuss and resolve. First, the adapted mesh design reduces the computational cost of solving resistivity models with embedded structures of considerably different scales. Second, the efficient solution of the linear system of equations (LSE) in cutting-edge massive parallel computing architectures. Here, reordering algorithms for sparse matrices and vector-based implementations (e.g., GPU-based schemes) are required. Noteworthy, FDTD schemes on curvilinear coordinates fitting body geometries to solve Maxwell equations have been used for decades (Holland 1983; Janaswamy and Liu 1997; Xie et al. 2002). Here, the most representative works are those that have been developed by Hue et al. (2005); Lee and Teixeira (2007); Lee et al. (2011).
3.1.2 Finite Volume (FV) Scheme
FV methods discretize the differential form of Maxwell’s equations. These methods are versatile and applicable to cell-centered, staggered, and unstructured meshes, enabling the representation of geological bodies with complex geometries.
The FV methods for EM modeling were introduced by Ward and Hohmann (1988) and developed and promoted by Madsen and Ziolkowski (1990) and Clemens and Weiland (2001). Later, several and diverse FV-based works have been published for EM imaging in geophysics (Haber et al. 2000; Haber and Ascher 2001; Haber and Heldmann 2007a; Hermeline 2009; Jahandari and Farquharson 2014; Guo et al. 2020).
The applicability of FV schemes for EM imaging in the presence of metallic structures has been tackled recently by using SimPEG code (Heagy et al. 2017). More concretely, a FV approach for modeling EM problems where steel-cased boreholes are present was introduced by Heagy and Oldenburg (2019a). Here, the authors investigated the EM field pattern on cylindrically symmetric and 3D cylindrical meshes for computational domains with large physical property contrasts and a large disparity in length scales. The upgraded version of SimPEG presented in Heagy and Oldenburg (2019a) demonstrates the value of FV computational tools to simulate, explore, and understand the behavior of EM fields when modeling steel-cased structures. Later, Heagy and Oldenburg (2019b) examine strategies to approximate steel-cased structures to reduce the computational cost of the FV simulations. Furthermore, the impact of physical parameters (e.g., background resistivity, steel-cased resistivity, and dimensions) on the amplitude of EM responses is analyzed. More recently, Hu and Yang (2021) used a FV scheme to simulate EM effects of metallic-cased structures for high-quality monitoring of the fracturing process. The authors proposed a FV mesh where the edges have a specific resistivity value. Such mesh edges correspond to the boundaries of thin resistive objects. Although the method provides a reference for the optimal deployment of EM recorders, its applicability is limited to typical frequencies. Finally, Heagy and Oldenburg (2022) perform FV simulations to investigate galvanic currents as well as image currents that are induced in the subsurface. Here, the authors studied the EM field pattern for monitoring applications.
The authors of FV schemes also stressed the importance of understanding the impact of metallic wells in EM fields. However, the inclusion of permeability effects and large-scale 3D EM modeling and inversion, mainly when physical features of the steel structure are unknown, are open questions.
3.1.3 Integral Equation (IE) Scheme
In IE-based formulations, Maxwell’s equations in differential form are treated as integral equations that require Green’s function (Duffy 2001). Following this procedure, the scattering form (SF) of Maxwell’s equations is obtained. The subsequent steps include discretizing the SF, solving the resulting dense LSE, and post-processing the EM responses. The IE method only meshes the scattering regions (e.g., anomalous areas) instead of the entire computational domain, which represent the main IE advantages over the FD, FV, and FE methods. As a result, IE formulations have been proposed to save computational resources (e.g., run-time and memory consumption), especially for 3D models, during the forward modeling. However, IE schemes usually require simple background input resistivity models (low-resistivity variations), which may not always be available in the realm of 3D EM imaging. We refer to Avdeev et al. (2002) and Zhdanov et al. (2006) for comprehensive reviews of IE methods for 3D geo-electromagnetic modeling.
The IE approach for the solution of in-homogeneous EM responses was first proposed by Dmitriev (1969) and Hohmann (1971). Later, Wait (1972) and Wait and Hill (1973) employ an IE method to compute EM responses of a half-space domain containing an infinite line conductor and a vertical cylinder of finite length. A volume IE scheme on hexahedral meshes to compute 3D EM responses was also introduced by Hohmann (1975). Later, Holladay and West (1984) employ an IE strategy to simulate hollow, infinite-length cylinders, and finite-length cylindrical shells embedded in a uniform half-space. The comparison between synthetic and experimental data demonstrated that EM fields are significantly altered by the presence of steel oil well casings. Qian and Boerner (1995) developed an IE method to model layered Earth setups in the presence of line conductors. Despite the excellent agreement between simulated data and reference solutions, the authors stressed the challenge of solving more realistic and complicated setups.
The method of moments (MoM), actively developed by the mining sector, is another IE scheme that has been applied to compute synthetic EM responses in the presence of steel structures. In the MoM, the resistive objects are discretized as a set of smaller segment lines. The sum of these small segments results in an approximation of electric dipole sources. Tang et al. (2015) applied the MoM principles to model a half-space where a steel well is treated as a grounded electrode in a oil and gas reservoir monitoring. Later, Patzer et al. (2017) employed an MoM scheme to investigate the interaction of EM fields when multiple metallic structures are embedded in 3D resistivity models. Kohnke et al. (2018) developed an MoM-based modeling routine to compute EM responses of multiple 3D metallic-cased wells in oil and gas production environments. Despite the algorithm supporting transmitter of arbitrary frequency and location and steel-cased wells of arbitrary geometry, only layered Earth resistivity models are considered. Anderson (2019) also introduced a modeling routine inspired on the MoM for reservoir monitoring including electrically conductive steel structures. More recently, Orujov et al. (2020) introduced an IE methodology to simulate horizontal metallic pipelines on the seafloor. To verify the robustness of the proposed method, the authors simulated different horizontal pipeline metallic structures. Orujov et al. (2022a) reported considerable reduction ratios in computational effort for the solution of layered resistivity models. These studies also examines the capabilities of a hybrid MoM scheme to model and invert EM data over steel-cased wells. Two test sites are considered, one located in eastern Colorado and the other at the Geophysical Discovery Lab (GDL) on the Colorado School of Mines campus. The experiments show that using this hybrid MoM approach makes it possible to reduce subsurface conductivity model artifacts introduced by the steel casing, enabling the geology around the steel infrastructure to be characterized.
3.1.4 Finite Element (FE) Scheme
Like the methods mentioned above, the FE is a widely used numerical technique for obtaining approximate solutions to boundary-value problems (BVP). The FE principle is to replace a whole continuous computational domain by a number of subdomains in which interpolation functions with unknown coefficients represent the unknown problem solution. Thus, the solution of the entire system is approximated by a finite number of unknown coefficients. The sparse LSE is obtained by applying variational methods such as the Ritz or Galerkin formulations (Burnett 1987). Finally, the sparse LSE is solved, and the FE interpolation functions are employed to post-process the EM fields.
The FE solutions for EM modeling are categorized into nodal-based and edge-based families. For accurate nodal-based FE computations, the divergence-free condition of the EM responses needs to be imposed to mitigate possible spurious solutions of the numerical modeling (Jin et al. 1999). A traditional strategy to address this issue is to formulate the EM problem in terms of electric potentials. However, numerical convergence can drop due to numerical differentiation required to compute EM responses (Um et al. 2013; Grayver and Kolev 2015). In contrast, the edge-based solutions provide stable numerical approximations by proper discretization of the curl space to which the EM fields belong (Nédélec 1980; Jin et al. 1999). Regardless of the chosen FE basis function type, FE approaches allow precise representations of complex geological geometries with less severe increase in problem sizes.
The use of FE methods for geo-electromagnetic imaging dates back to at least the 1970s, where 2D solutions to direct currents resistivity problems were investigated (Coggon 1971). Later, Rodi (1976) introduced a FE scheme to simulate passive EM methods on quadrilateral meshes. A considerable improvement in accuracy ratios and computational effort for 2D EM modeling was by the FE algorithm presented in Rijo (1977). Other pioneering works on 2D EM modeling are those presented by Wannamaker et al. (1986) and Wannamaker et al. (1987). For EM modeling in 3D space, the computational cost of FE increased dramatically. Therefore, with the development of computing power, FE algorithms for 3D EM modeling gained a proficient increase development (Mur 1991; Zyserman and Santos 2000; Schwarzbach 2009; Key and Ovall 2011; Schwarzbach et al. 2011; da Silva et al. 2012; Puzyrev et al. 2013; Castillo-Reyes et al. 2018; Rochlitz et al. 2019; Castillo-Reyes et al. 2022b). It is worth noting that none of the referenced FE codes supports variable magnetic permeability, which is both a desirable feature and a significant challenge (see Sect. 2) in the domain of numerical EM modeling and EM imaging, particularly in the presence of metallic artifacts.
Since FE schemes can overcome the issues regarding structured meshes due to their full flexibility concerning complex geometrical structures using unstructured meshes, it has been widely used for EM modeling when small metallic structures are present. One of the first attempts of 3D EM modeling using the FE method dates to the 1990 s, when Wu and Habashy (1994) presented numerical simulation methods of metallic well responses and their validation against experimental data in oil reservoirs. Later, Um et al. (2015) presented a time-domain FE algorithm to simulate scenarios where the steel-cased well is used as a virtual transmitter to improve the sensing capacity of deep targets. An adaptive time stepping is proposed to reduce the computational modeling cost. Also, the steel-cased well is approximated with a rectangular prism, which improves overall mesh quality without sacrificing quality in the computed EM responses. Another time-lapse 3D FE method to compute 3D EM responses was presented by Tang et al. (2015), where vertical metallic-cased borehole is used as a transmitter to excite the resistivity model. Despite the considerable computational cost, the comparison between synthetic and analytical data demonstrated that steel-cased wells could be used as source electrodes to improve reservoir monitoring tasks.
Weiss et al. (2016) conducted FE simulations to assess the usefulness of direct-current resistivity data for characterizing subsurface fractures. This study involved a geophysical experiment, where a grounded current source was deployed within a steel-cased borehole. The proposed method is advantageous, in terms of computational cost, for detecting and monitoring the time evolution of electrically conducting fractures. Other FE relevant work was presented by Cuevas and Pezzoli (2018) where an in-depth analysis of EM fields arising in the vicinity of metallic-cased wells is performed. The FE approximations reproduce with sufficient reliability the behavior of EM fields on challenging oil and gas models. Recently, a novel FE approach to simulate the casing effects on EM measurements was proposed by Um et al. (2020). To avoid using extremely fine meshes, the authors modeled the metallic casing as a combination of a short solid conductive prism and a long linewise perfect electric conductor (PEC; (Zhu and Cangellaris 2006)). Since PEC discretizations are volumeless, an excessive number of small elements in the vicinity of the steel casing is not needed, thus reducing the computational cost considerably. Finally, Castillo-Reyes et al. (2021) combined high-order meshes with adaptive gridding. The authors considered different setups of a steel-cased well in a geothermal application context. A solid cylinder is used to model the steel-cased well. An adaptive-meshing technique has been validated in land contexts, particularly to incorporate small structures into the full 3D modeling routine. Numerical results presented by these authors are almost identical with respect to real data measurements and confirm that metallic casing presence strongly influences EM responses. Although, its effect are limited to the close vicinity of the steel-cased well.
3.2 Meshing
Mesh design is fundamental to the formulations and implementation of numerical methods and defines the realistic degree of geometrical representation of geological structures. Recently, Spitzer (2022) reviewed the different types of FE used to model vector EM fields and scalar potentials, and discussed the types of meshes underlying the discretization schemes with respect to their ability to represent arbitrary geometries. Mesh design falls into two classes: structured meshes and unstructured meshes. The generation of structured meshes is relatively simpler than unstructured grids that may be time consuming. Here, we discuss the most relevant aspects of each meshing approach.
FD-based formulations mainly dominate the use of structured meshes. In this approach, the SF of the governing equations is transformed into a curvilinear coordinate system aligned with the target surface. This process can be easily applied to modeling simple geometries. Additionally, nodal neighbor connectivity for structured meshes simplifies its computational implementation. However, this also limits its application scope, making it unsuitable for modeling highly complex geometries. Furthermore, when refinement of specific regions is required (e.g., source or receiver positions), unnecessary small mesh spacing in the other areas of the computational domain is produced. Given its simple implementation and despite spatial discretization limitations, structured meshes have been applied to compute EM responses in the presence of metallic structures (Wilt and Alumbaugh 2003; Commer et al. 2015; Puzyrev et al. 2017; Wilt et al. 2020).
Cylindrical meshes are another type of structured grids. These meshes are defined in terms of radial position, vertical position, and azimuthal position. They belong to the tensor mesh class and are particularly valuable for solving differential equations with rotational symmetry. Codes based on cylindrical meshes offer computational efficiency and the capability to resolve fine-scale physics (Heagy et al. 2017). However, cylindrical meshes are most suitable for problems exhibiting rotational or axial symmetry. They may not be appropriate for scenarios lacking such symmetry, where other mesh types like Cartesian or unstructured meshes are more suitable. Additionally, handling complex boundaries, especially those with irregular shapes or interfaces, can pose challenges when using cylindrical meshes compared to alternative mesh types. Special techniques are often necessary to address these complexities, potentially leading to increased computational overhead and requiring additional code development effort (Spitzer 2022).
The design and use of unstructured meshes were proposed to overcome the inherent geometrical discretization limitations of structured grids. In this type of meshes, the SF of the governing equations is discretized by the FV or FE method. Unstructured meshes can accurately segment curved boundaries of challenging geological bodies such as topography, bathymetry, or small structures like boreholes. While unstructured meshes offer geometric advantages, their utilization in EM modeling and imaging with finely meshed casings rapidly becomes numerically prohibitive and highly ill-conditioned. Therefore, the use of adaptive mesh refinement technologies is needed. These strategies positively impact the size of sparse LSE arising from numerical discretization. As a result, using unstructured meshes and goal-oriented meshing for FE computations has gained wide influence. A variety of efficient FE meshing techniques, automatic or non-automatic, have been proposed for EM modeling (Key and Ovall 2011; Schwarzbach et al. 2011; Ren et al. 2013; Grayver and Kolev 2015; Castillo-Reyes et al. 2018, 2019, 2022a; Yang 2023). The main objective of these strategies is to produce accurate EM responses at discrete locations (e.g, receiver positions) while avoiding excessive mesh refining around such regions.
Despite its benefits in terms of accuracy and computational effort, tailored meshing (or goal-oriented meshing approaches) for EM imaging in the presence of metallic structures is an open topic. As main difficulties of unstructured meshing: (i) large number of grid elements to discretize the geometries (e.g., circular geometries of steel-cased wells) and (ii) poor mesh quality from mixing extreme multi-scale grid elements. One of the first attempts to build adapted mesh in this regard was presented by Um et al. (2017), where a tetrahedral mesh generation strategy for 3D marine controlled-source modeling was introduced. The applicability of this approach was evaluated for monitoring oil fluid movements. Here, several source-receiver configurations were employed to investigate the EM fields sensitivity to resistivity variations at reservoir depths. The numerical experiments demonstrated that the mesh density does not strongly depend on the maximum source-receiver offset due to the numerical dispersion error oscillations. As a result, the authors identify three main advantages of the proposed meshing technique: (i) Adapted meshes can effectively reduce the number of elements around receivers and steel-cased wells, (ii) the design of meshes with regions of different characteristic element sizes allows the modeling of large computational domains, and (iii) tailored meshes for a subset of source-receiver configurations makes it possible to compute them simultaneously using parallel computers.
Another novel meshing approach to solve EM scattering problems in the presence of thin conductors was presented by Weiss (2017). To avoid the excessive number of elements concentrated in a volumetrically small region of the computational domain, this approach employs tetrahedral FE meshes where the thin steel structure is approximated by a set of connected edges with resistivity values explicitly defined. The benchmarking tests demonstrated that these FE meshes are favorable in terms of accuracy and computational cost. Note that this approach is sequential. In addition to the previous approach, another meshing technique is designed to reduce meshing cost. Methods like the MoM and techniques involving edge or surface conductivity of the input mesh, as well as thin-sheet modeling, belong to this category (Kohnke et al. 2018).
The aforementioned valuable works use adaptive-meshing technologies in conjunction with low-order FE formulations. However, the use of higher-order FE methods for modeling EM problems was recently reported (Schwarzbach et al. 2011; Grayver and Kolev 2015; Castillo-Reyes et al. 2019; Rochlitz et al. 2019). To our knowledge, the first attempt of using a high-order FE method on tailored meshes to compute EM responses in the presence of small metallic-cased wells was presented by Castillo-Reyes et al. (2021). Here, the authors validated an adaptive-meshing technique and its incorporation into a full 3D high-order FE EM modeling tool. The proposed tailored meshing technique has been evaluated in a geothermal exploration context, and different transmitter-receiver configurations on several 3D resistivity models have been modeled. It has been observed that the tailored meshing proved to be capable of dealing with multiple resolution discretizations and challenging resistivity models (synthetic and experimental data). Furthermore, a rigorous convergence test showed that the design of adapted meshes provide accurate EM responses while avoiding unnecessary refinement in the whole computational domain. Recently, Castillo-Reyes et al. (2023) evaluated the benefits and computational effort (e.g., run-time and memory consumption) of high-order FE, goal-oriented mesh refinement, and PEC formulations. The numerical results confirm that the studied numerical schemes benefit computing EM responses for realistic 3D EM models with small embedded steel structures.
3.3 Computational Strategies
Modeling and inversion of 3D EM datasets using cutting-edge computational strategies have a fundamental role in solving the next generation of geoscience problems. In real-life setups, these problems are complex and computationally expensive. A multidisciplinary collaboration strategy is key to understanding and solving the physical equations, preprocessing and post-process the associated data with physical experiments, and building interpretations from the analysis of the obtained numerical results. Below we discuss the most relevant aspects in terms of computation complexity for the solution and interpretation of EM data in the presence of metallic structures.
3.3.1 Solvers
Regardless of the chosen selected numerical scheme and target application, EM modeling and imaging methods can be categorized into frequency-domain and time-domain approaches. In both instances, these methods entail algebraic problems that simplify the governing Maxwell’s equations into a linear system of equations (LSE). This LSE can be written as \({\mathbb {A}} \varvec{x=b}\), where \({\mathbb {A}}\) is the matrix defined by the input resistivity model and mesh discretization, \({\varvec{x}}\) is the vector of unknown EM fields or degrees of freedom (dof), and \({\varvec{b}}\) is given by a source term and boundary conditions. Note that matrix \({\mathbb {A}}\) is sparse, complex, and symmetric for FD, FV, and FE formulations. For IE-based solutions, \({\mathbb {A}}\) is dense, complex, and asymmetric.
The resulting LSE can be solved in an iterative or direct manner. These solving approaches are comparable in terms of memory demands and convergence rates. Below, we delve into the most pertinent aspects of each one.
Iterative solvers (IS) usually require less memory and are often the preferred strategy for solving very large LSE. Furthermore, IS can achieve better scalability ratios in massively parallel computers. As a result, IS have been used to solve LSE arising from EM modeling (Newman and Alumbaugh 1997; Puzyrev et al. 2013; Castillo-Reyes et al. 2018). Here, the parallel iterative methods provided by the PETSc library (Balay et al. 2019) arise as the most popular. However, the use of IS for EM modeling with metallic structures is scarce because meshes with large-scale variations and highly resistivity contrasts lead to ill-conditioned sparse matrices. This numerical instability, quantified by the condition number of matrix \({\mathbb {A}}\), often results in poor convergence of the IS (Schwarzbach 2009; Castillo-Reyes et al. 2019). As a result, ad hoc preconditioning techniques have been proposed to speed up the IS convergence. Among these iterative preconditioners, Jacobian and successive over-relaxation preconditioners arise as the most simple and cheaper options from a computational perspective (Axelsson 1996; Um et al. 2013; Castillo-Reyes et al. 2018). Preconditioners based on multigrid methods are more advanced solutions (Mulder 2006; Koldan et al. 2014; Grayver and Kolev 2015). In addition, the computational effort of IS grows linearly with the number of sources (e.g., number of \({\varvec{b}}\) vectors).
Pivoting and matrix scaling techniques allow direct solvers (DS) to mitigate error growth during matrix factorizations. Once \({\mathbb {A}}\) factorization is available, simple forward/backward substitutions allow modeling multiple source scenarios, with one \({\varvec{b}}\) for each source. Despite the benefits from a numerical perspective, the main disadvantage of DS is that, especially for large-scale problems, the computation of the vector solution \({\varvec{x}}\) can be memory-consuming prohibitive. Furthermore, the number of floating-point operations (flops) required to perform the matrix factorization is huge and grows non-linearly with the LSE size. Consequently, the use of DS for 3D EM modeling and imaging problems has traditionally been considered computationally expensive. However, the continuous improvement in sparse DS and computing power led to applying DS solutions even to large-scale 3D EM forward and inverse problems. Here, the sparse direct methods provided by WSMP (Gupta 2000), PaStiX (Hénon et al. 2002), SuperLU_DIST (Li and Demmel 2003), PARDISO (Schenk and Gärtner 2004), UMFPACK (Davis 2004), SuperLU (Li 2005), and MUMPs (Amestoy et al. 2016) arise as the most popular.
Given numerical advantages and long with the availability of modern massively parallel computers, the use of DS has gained traction to solve EM imaging problems with embedded metallic structures. Here, the MUMPs solver have been widely employed in for oil and gas applications (Streich 2009; Grayver et al. 2013; Shantsev et al. 2017; Um et al. 2020) and for geothermal energy reservoir characterization (Castillo-Reyes et al. 2021, 2023). The PARDISO solver has been also used for 3D EM modeling of the casing effect on a borehole-to-surface in an oil and gas setup (Puzyrev et al. 2017; Heagy and Oldenburg 2019a, b, 2022). In all these MUMPs and PARDISO, an excellent agreement between simulated data and reference solutions have been observed. Furthermore, the authors stressed the challenge of not exceeding the memory limits and maintaining a tractable computational cost, particularly for inversion of 3D EM data.
Despite the notable advancements achieved in the field, the efficient resolution of subsurface modeling and inversion problems remains a significant challenge. One particular issue in simulating EM behavior in the presence of metallic structures is the high material contrast between steel and air. Steel wells exhibit a high electrical conductivity, approximately \(10^{6}\) S/m, while air acts as a near insulator, with a conductivity of around \(10^{-14}\) S/m. Despite the significant contrasts in electrical conductivity, spanning 20 orders of magnitude, several techniques have been developed and successfully validated to mitigate substantial numerical errors that could potentially lead to incorrect results. Pioneering works in this context include those presented by Gillman and Barnett (2013), Um et al. (2015), Heagy and Oldenburg (2019b), Um et al. (2020), Chen et al. (2021), Heagy and Oldenburg (2022), Helsing et al. (2022), and Orujov et al. (2022a).
3.3.2 Parallelism
High-performance computing (HPC) has widely proved to play a crucial role in technology innovation in almost all areas of science and industry (Osseyran and Giles 2015). The topics of 3D EM modeling and imaging are not foreign to massively parallel computing resources. With the impressive advance of HPC technology in the 1990s, computation of EM fields for modeling and inversion has matured considerably. Furthermore, parallel computing technologies has allowed us to deal with extremely large and challenging problems, making modeling and inversion of EM dataset practical for real industrial use. Often cited publications about HPC role for geo-electromagnetics are Alumbaugh et al. (1996), Newman and Alumbaugh (1997), Oristaglio and Spies (1999), Zyserman and Santos (2000), Zhdanov and Wannamaker (2002), Key and Ovall (2011), Grayver et al. (2013), Puzyrev et al. (2013), Koldan et al. (2014), Newman (2014), Grayver and Kolev (2015), Heagy et al. (2017), Castillo-Reyes et al. (2018), Castillo-Reyes et al. (2019), Rochlitz et al. (2019), and Werthmüller et al. (2021).
Parallel solutions to EM imaging and inverse problems aim to face the large-scale computing needs that imposed by the physical diffusion of EM wavefields and computational demands for accurate solutions. Regardless the numerical method, application context, and computational architecture, state-of-the-art EM imaging methods should be efficiently implemented on HPC and be sought for:
-
(i)
Providing accurate solutions in a feasible run-time. The LSE that results from the EM modeling problem is sparse, large, and highly ill-conditioned. Hence, HPC technologies are essential to solving (iteratively or directly) these LSE effectively. This issue is particularly relevant for LSE arising from industrial-scale problems (might involve over \(100\,000\) LSE solutions if it fuels an inversion process (Osseyran and Giles 2015)). The arrival of heterogeneous HPC platforms enables new parallel approaches to speed up solver computations. Modern graphics processing units (GPUs) offer tremendous potential for performance and efficiency in numerous and diverse large-scale applications for science and engineering. Since GPUs are suitable for computationally intensive scientific tasks, it is interesting to try accelerating solver computations by turning general-purpose processor implementations into GPU architectures. We refer to the following papers for GPU implementations in the context of EM modeling and inverse modeling: Commer (2011), Sommer et al. (2013), Dagostini et al. (2021), Yang (2021), Yang (2023), and Demirci (2022).
-
(ii)
Tackling problems efficiently on HPC architectures. HPC implementations require careful considerations of memory hierarchies, communication modes, and algorithm scalability, among implementation details. Since HPC is evolving in a wave of impressive advances, these aspects are fundamental for efficient parallel EM computations. Furthermore, these computational considerations will be even more representative for the upcoming exascale supercomputing era (Shalf et al. 2011). Thus, research on new parallel programming paradigms to increase the performance of EM modeling routines and better use of HPC resources is critical.
-
(iii)
Providing flexible workflows with easy addition/remotion of software components. Parallel computing environments are complex, and using flexible frameworks for developing HPC software packages for EM imaging reduce the development costs of new functionalities. In the presence of single or multiple EM (CSEM, MT, gravity) datasets, these frameworks should offer amenable coupling and execution of alternative modules for forward and inverse modeling, LSE solution, result assessment, and uncertainty quantification, to define effective numerical strategies. Of great importance in that these frameworks must favor software portability, fault tolerance, and input/output visualization. Framework flexibility, robustness, and portability would allow the interpretation of dense coverage and multi-component data volumes. For instance, SimPEG has been developed toward these goals (Heagy et al. 2017).
Nevertheless, these remarkable benefits also give rise to a set of practical challenges that warrant careful consideration. While the concept of parallelization over a range of frequencies appears to be a straightforward approach (Zyserman and Santos 2000; Key and Ovall 2011; Puzyrev et al. 2013; Grayver and Kolev 2015; Yang 2023), the practical implementation of certain strategies, such as domain decomposition (Zyserman and Santos 2000; Elías et al. 2022), which involves dividing the computational domain into smaller data subdomains local mesh with a subset of data for parallel processing (Yang and Oldenburg 2016; Yang et al. 2019), faces inherent limitations when dealing with simulations involving metallic structures. This issue becomes particularly pronounced due to the considerable spatial footprint associated with the source utilized in these simulations, which is typically substantial in the case of metallic wells. As a result, direct application of domain decomposition schemes is not readily feasible when the source possesses a significant spatial extent, as is often the case in the context of metallic wells. Consequently, employing conventional domain decomposition techniques may not be practical or efficient, leading to a substantial computational demand that necessitates the utilization of a large number of mesh elements to accurately simulate EM behavior in the presence of metallic artifacts.
In essence, the complex nature of subsurface EM modeling, particularly in scenarios involving metallic wells, necessitates the exploration of innovative HPC strategies that can effectively manage the inherent challenges associated with the large spatial footprint of sources and large conductivity contrasts. These challenges underscore the importance of ongoing research efforts to develop tailored approaches that balance computational efficiency with the need for accurate and reliable simulations in the presence of metallic artifacts.
3.3.3 Artificial Intelligence (AI)
AI technologies employ algorithms that allow computers to simulate and solve problems that usually require human intelligence. The simulation of human intelligence processes with minimal human intervention can match or exceed human performance. To mimic human perception, learning, and reasoning, AI requires many parameters and large dataset sizes to train complex algorithms. With recent computing power, data storage system advancements, and availability of high-quality datasets, AI technologies have transitioned from theory to application. In particular, artificial neural networks (ANNs) focused on mimicking human brain operations represent an AI technology with a vast number of applications in Earth sciences (for instance, see Ashena and Thonhauser (2015) and Sun et al. (2022), for a general review). While we find a significant number of ANN geophysical applications, models assisting the processing of EM data carrying effects from metallic bodies are very recent and scarce. We provide some reference works for comparison in the following paragraphs.
For geophysical prospecting tasks, ANN have already been successfully applied in seismic imaging and inversion (Baddari et al. 2009; Lewis and Vigh 2017; Xiong et al. 2018; Yang and Ma 2019; Zheng et al. 2019; Iturrarán-Viveros et al. 2021), geophysical workflow optimization (Van der Baan and Jutten 2000; Araya-Polo et al. 2019; Biswas et al. 2019; Di et al. 2020), and uncertainty quantification (Das et al. 2019; Siahkoohi et al. 2020). ANN has been proved useful for modeling and inverting EM datasets. In this regard, pioneer works by Puzyrev (2019) and Puzyrev and Swidinsky (2021) introduced ANN strategies for inversion of controlled-source EM responses in frequency and time domain. Manoj and Nagarajan (2003) and Conway et al. (2019) also effectively employed ANN for processing time-series of MT data. ANN technologies have been also applied for imaging and inversion of borehole resistivity measurements Shahriari et al. (2020b, 2020a); Zhu et al. (2020). None of these works accounts for the presence of metallic structures in the modeling space.
Alternatively, Wan et al. (2021) develops a robust multi-layer perceptron for the detection of underground metal objects that works in combination with the kernel principal component analysis method for data dimensionality reduction. This network presents only one hidden layer with 50 neurons and employs the limited-memory Broyden–Fletcher–Goldfarb–Shanno algorithm for weight optimization. Li and Yang (2021) present a deep CNN to model fluid distribution in hydraulic fracturing scenarios that include steel-cased wells. This network results suitable for real-time predictions and behave reliably for data with ambient noise and casing conductivity inaccuracies. The synthetic training and validation dataset presents 30K samples, and the total number of network weights is close to 3.1 million. The optimization algorithm for weight estimations is a stochastic gradient descent.
Lastly, the following works provide ANN-based solutions with a high potential for the detection of buried metallic structures. Chiu et al. (2023) propose a deep CNN that processes measurements of the scattered field for accurate form reconstruction of objects with different shapes. This deep CNN has been applied to some synthetic tests in the presence of low noisy data. The loss training function is the mean square error, and the activation function is the rectified linear unit (ReLU). Ozkaya and Seyfi (2018) develop a deep dictionary learning method, with an adjustable number of hidden layers, able to apply different classification algorithms and achieve high detection performance in ground penetrating radar (GPR) applications. For training and testing, a database of 180 GPR synthetic images including objects with different geometries made of five different materials. Panda et al. (2016) present a ANN for detection of delamination/voids and metal bars embedded in buried concrete structures for health monitoring applications. The model corresponds to a three-layered feed-forward ANN where the input, hidden, and output layer presents 70, 30, and 10 neurons, respectively. Network training employs a synthetic dataset and the Levenberg–Marquard algorithm for weight optimization. It also employs a cross-entropy activation function with an L2-regularization term for over-fitting reduction.
4 Configurations and Applications
In the 1980s and 1990s, during the development of logging measurements, many holes were cased with metallic casing, and concern over its effects on EM measurements pushed for analytical and later numerical studies, as well as laboratory experiments (Wu and Habashy 1994). The main question was whether EM logging measurements could be used as a tool for reservoir characterization and monitoring, considering the distortion caused by metallic effects. Therefore, nowadays, the presence of metallic structures, particularly metallic casing, is seen as an opportunity to improve measurements rather than causing noise or distortion. Numerous simulations, using analytical and numerical approaches, have shown how deep targets can be characterized and monitored using active EM geophysical techniques due to the presence of pipes and metallic casing. In this context, Table 1 provides an overview of codes for EM modeling and inversion in the presence of metallic structures.
Summarizing different configurations is complex due to the vast number of combinations of arrays, tools, and setups. While there is a considerable amount of numerical simulation work (Commer et al. 2015; Tang et al. 2015; Um et al. 2015; Vilamajó et al. 2015, 2016; Cuevas and Pezzoli 2018; Shahriari et al. 2020a; Um et al. 2020; Castillo-Reyes et al. 2021; Shahriari et al. 2021; Heagy and Oldenburg 2022; Castillo-Reyes et al. 2023), there are relatively few studies reporting real or experimental data (Tietze et al. 2015; Vilamajó et al. 2015; Puzyrev et al. 2017; Orujov et al. 2020; Wilt et al. 2020; Castillo-Reyes et al. 2021). Figure 2 outlines the possible configurations of the source with respect to the metallic structure and target in the subsoil. Typically, grounded sources are used to take advantage of the metal properties, both in on shore context and in marine one, where the sources are towed thought the water near the sea floor and onshore contexts. Common configurations include the use of horizontal electrical dipoles (HED) (\(T_{x1}\) at the surface seabed or land, and \(T_{x2}\) when one pole of the dipole is connected to the casing (Streich and Swidinsky 2023), and vertical electrical dipoles (VED) (\(T_{z1}\) inside the casing but not in contact with it, or \(T_{z2}\) as a deep source at the bottom of the casing and without contact with it). Inductive sources, such as the vertical magnetic dipole (VMD) or horizontal magnetic dipole, are also considered, particularly when dealing with sources within the pipe. Similarly, the receivers, typically electric passive dipoles for measuring the electric field or coils for measuring the magnetic field, can be placed in equivalent positions. For practical and technical reasons, surface profiles (radially centered in the well or metallic structure, or inline) are commonly used to obtain the fields at different offsets.

Overview of possible source configurations in a casing or metallic structures environment. \(\rho _{i}\) represents the electric resistivity/conductivity of each material. The target can be a fault, a reservoir, a CO\(_2\) deposit, or whatever one wishes to characterize at depth. The background formation can be varied, typically semi-stratified. Furthermore, the VED may either located inside or at the bottom, ensuring that they remain entirely isolated from direct contact with the metal casing. The VED are positioned inside (\(T_{z1}\)) or at the bottom (\(T_{z2}\)) of the casing but is kept isolated from direct contact with the metallic structure
The selection of frequency range and mode of operation is crucial for each configuration. Transmitters for the sources can operate in DC (resistivity method), low frequencies (less than 10 Hz), or high frequencies (higher than 100 Hz), each with different penetration depths and consequently, varying resolution, sensitivity, and complexity. Choosing between time domain, where the transmitter operates using step-off waveforms, or frequency domain, where the transmitter operates using continuous periodic forms, is also an important decision, each with its own advantages and disadvantages. Although, theoretically, working in either domain should be equivalent due to the Fourier transform relationship between them, practical implementation, including measurements, data processing, and inversion, often reveals differences (Mörbe et al. 2020). Typically, time-domain measurements may offer a broader depth range if the equipment has a wide dynamic range, but they may also suffer from higher levels of environmental EM noise. Conversely, frequency-domain measurements generally exhibit greater lateral sensitivity and resolution, particularly when the frequency range of interest is well-defined. It is noteworthy that contemporary equipment capabilities, as well as processing and inversion tools in both domains, are highly robust. Therefore, the choice between time and frequency domains ultimately depends on the available tools and the specific properties of the exploration target (Streich 2016).
The DC configuration is notable for being pioneering and facilitating analytical approaches (Kaufman 1990; Kaufman and Wightman 1993). Theoretical studies (analytical, semi-analytical, or numerical) are commonly performed in the time domain as it provides a more intuitive way to observe the EM field at early, transition, and late times. Frequency domain simulations and real data are more frequently used for realistic simulations.
It is worth noting that there are concerns regarding the repeatability of EM measurements in the context of monitoring or time-lapse EM. These concerns stem from potential errors in the range of the measured changes in the EM field, as discussed in studies by Orange et al. (2009) and Streich (2016). This issue becomes particularly relevant when considering the improved signal-to-noise ratios achieved in borehole-to-surface field experiments.
From a physical perspective, the strong contrast in electric and magnetic properties between metallic infrastructures (such as casings or pipes) and geological materials (with electrical conductivity contrasts of up to five orders of magnitude and magnetic permeability contrasts typically of two orders of magnitude) results in two superimposed phenomena: galvanic and inductive effects. Galvanic effects correspond to changes in charge density at the boundaries and induced currents channeled along the metallic structures. These effects are more significant when active dipoles are located in close proximity or even inside the structure (e.g., inside the well) and when the source (active dipoles) is at the bottom of a metallic casing and very close to it.
Typically, a metallic casing is simulated as a long electric source or a set of vertical or horizontal dipoles, functioning as an antenna (Kaufman 1990; Schenkel and Morrison 1990; Kong et al. 2009; Cuevas 2014). This antenna has a strong effect that can be advantageous or disadvantageous depending on the target. The metallic casing can increase the EM signal-to-noise ratio and help illuminate deep structures or resistivity anomalies associated with the presence or displacement of a CO\(_2\) bubble (Um et al. 2015) or fluids (Colombo et al. 2018), depending on the specific study context. Several studies consider different values for the electrical conductivities of metallic or stainless-steel casings, as well as their length, thickness, and even internal structure. The most sensitive parameters are the length and inner-outer radius of the casing, along with the conductivity contrast between the casing and the geological formation in contact with it. Figure 3 shows a simple model illustrating the antenna effect corresponding to a 200-m-long metallic casing. The source, a VED, is located at \(z=-204\) m (4 m below the casing). It demonstrates how the responses are affected compared to what would be produced by the same dipole at \(z=-2\) m without casing.

Horizontal electric field amplitude \(|E_x|\) for a simple model with a metallic casing, where the VED (\(T_z\)) is located 4 m below the casing. The length of the casing is 200 m, and the background is a homogeneous medium with a resistivity of 20 \(\Omega \,\)m. For comparison, the solid line corresponds to responses without casing, but with the VED (\(T_z\)) positioned very shallow at 2 m depth. In both cases, a frequency of emission of 2 Hz was used. These responses were simulated using the PETGEM code (Castillo-Reyes et al. 2018)
Furthermore, to address key practical questions about the behavior of EM fields distorted by the casing effect (Puzyrev et al. 2017) conducted 3D frequency-domain EM modeling considering the casing effect and investigated its applicability to the borehole-to-surface configuration of the Hontomín CO\(_2\) storage site. The simulation results confirm that borehole-to-surface EM tools are sensitive to resistive targets located not too far away from the source in the presence of steel-cased wells. For clarity and illustrative purposes, Fig. 4 presents the original one by Puzyrev et al. (2017), depicting the ratios of the amplitudes of the horizontal electric field for different positions of the small CO\(_2\) plume.

Ratios of amplitudes of horizontal electric field for different frequencies and various positions of a small CO\(_2\) pilot plume, as investigated by Puzyrev et al. (2017). The size of the plume is 185 x 185 x 14 m. Its bottom is located at \(1\,470\) m, and its top touches the tubing at \(1\,456\) m. The VED source is positioned at a depth of \(1\,480\) m, 10 m below the target. It has a homogeneous saturation of 50%, resulting in a post-injection to preinjection resistivity contrast of 4
Further aspects include unexploded ordnance (UXO) detection and similar tasks where the geometry and precise locations of potential targets are unknown. In these situations, it is particularly challenging to identify and locate UXO or similar hazardous objects, which may be buried underground or hidden in various terrains. Traditionally, these surveys adopt a mapping approach, which often involves systematic scanning of the area to map out anomalies or areas of interest. This approach is commonly used in techniques like airborne time-domain electromagnetic (TEM) or helicopter electromagnetic (HEM) surveys. In such surveys, EM sensors are used to measure the electrical conductivity of the subsurface, and variations in these measurements may indicate the presence of buried metallic objects like UXO. However, the inherent uncertainty regarding the size, shape, and depth of potential targets makes detection and characterization challenging. To address this, machine learning (ML) approaches have been increasingly applied to enhance data interpretation (Heagy et al. 2020). These ML techniques leverage the available data to develop models that can better distinguish between natural geological anomalies and potential hazardous objects. They can also help estimate the location and properties of the detected targets more accurately, aiding in the safe and efficient removal or neutralization of UXO and reducing potential risks to human safety.
Inductive effects have been less studied. They arise when the metallic structures also exhibit magnetic properties, resulting in small variations in the field and can be considered as time-varying secondary sources (Cuevas and Pezzoli 2018). Recently, Heagy and Oldenburg (2023) extended the study and demonstrated cases in which the magnetic effects can be more significant. This work provides an excellent examination of the relationship between currents and magnetic fields in the casing for a simple model. However, as these authors point out, further studies are necessary to explore how to incorporate magnetic permeability into the modeling and subsequent inversions. Moreover, some authors suggest that induced polarization (IP), widely utilized in mining due to its sensitivity to metals, can produce effects in EM data (Holladay and West 1984; Mulder 2006; Kang and Oldenburg 2016). However, there is a scarcity of research at the intersection of IP effects and EM modeling and imaging in the presence of metallic artifacts. Although cited works provide valuable insights, a research gap remains in this area.
5 Discussion
Once insights behind EM modeling and imaging in the presence of metallic artifacts, development of EM modeling and imaging algorithms, and applications and configurations were studied, in this section, we discuss recommendations for EM modeling and imaging in the presence of metallic structures. Additionally, we outline a comprehensive future development agenda, emphasizing the need for advancements in software tools and addressing geological complexities. Through these discussions, we aim to provide valuable insights for researchers and encourage the development of a robust technological ecosystem to satisfy application needs.
5.1 Tailoring Strategies to Application Needs
After examining the main points raised in this review, one can see that it is complex to judge which is the best modeling strategy, due to different applications have different requirements. However, preferable modeling strategies can be employed for models that contain similar features as the presented ones:
-
(i)
Numerical method. When modeling EM fields around metallic structures, it is important to choose numerical methods that can accurately capture the complex behavior near conductive materials. FD is suitable for EM imaging, with straightforward implementation and efficient on vector computing architectures. However, unable to handle unstructured grids, requiring stair-case gridding for complex geometries. FV is also suitable for EM imaging, discretizing Maxwell’s equations with a straightforward formulation. It can be applied to unstructured meshes, enabling representation of complex geological bodies. On the other hand, the IE method can be efficient for forward modeling as it meshes only scattering regions, saving computational resources. However, IE formulations require simple background resistivity models, limiting its applicability in 3D EM imaging in the presence of metallic structures. Finally, the FE method provides straightforward and reliable numerical formulations for solving the EM problem. Its utilization of unstructured FE meshes offers the flexibility to effectively handle small metallic structures and accurately represent intricate geometries, all while avoiding a substantial increase in problem size. Since each method has its strengths and limitations when modeling EM phenomena with metallic structures, in choosing the numerical method, we must consider the specific problem requirements, geometry complexity, and available computational resources.
-
(ii)
Meshing. Proper meshing is crucial for accurate and efficient EM modeling, especially in the presence of metallic structures. Structured meshes, such as Cartesian grids (e.g., FD schemes), can be advantageous when the geometry is relatively regular. They offer simplicity and ease of implementation. However, unstructured meshes, such as triangular or tetrahedral meshes (e.g., FV and FE), are more flexible and can better represent complex geometries and irregular structures. In the vicinity of metallic structures, it may be necessary to refine the mesh to capture the EM fields accurately. Here, the use of tailored meshing is highly recommended.
-
(iii)
Solver. The choice of solvers can significantly impact the computational efficiency and accuracy of EM modeling. IS are often preferred for large-scale EM modeling with metallic structures due to their lower memory requirements and better scalability on parallel computers. However, they can suffer from poor convergence when dealing with ill-conditioned sparse matrices. To improve convergence, ad hoc preconditioning techniques like Jacobian and successive over-relaxation can be employed. DS provide a direct solution to the LSE in EM modeling and offer numerical stability. They are suitable for handling multiple source scenarios efficiently but can be computationally expensive, especially for large-scale problems, due to memory and computational requirements. However, DS gained popularity for EM imaging with metallic structures due to numerical advantages and modern parallel computing availability.
-
(iv)
Parallel computing and AI schemes: To tackle the computational demands of large-scale EM modeling, parallel computing and AI schemes can be employed. Parallel computing techniques, such as domain decomposition, allow distributing the computational workload across multiple processors or computing nodes. This can significantly speed up the simulations and enable the handling of larger models. Additionally, AI techniques, such as ANNs, can be utilized to accelerate the modeling process. ANNs can learn the mapping between input parameters and EM responses, enabling fast predictions and reducing the computational burden associated with inversion or optimization tasks.
By combining appropriate numerical methods, meshing strategies, solvers, and leveraging HPC and AI schemes, EM modeling in the presence of metallic structures can be more accurate, efficient, and scalable. However, it is important to carefully assess the specific requirements of the problem at hand and choose the techniques that best suit the complexity and scale of the application.
5.2 Future Challenges
EM field simulation techniques in the presence of metallic structures have been developed to solve different problems in complex geometry models with realistic physical parameters (e.g., high-resistivity contrasts), differing in numerical accuracy and computational speed. Despite this effort, a substantial agenda exists for EM imaging in the presence of metallic artifacts. Such progress must address in:
-
(i)
Advancements in modeling and inverse EM problems. One significant challenge on the horizon in the field of EM modeling and imaging involves the development of methods capable of accommodating variable permeability. While notable progress has been achieved in addressing thin, highly conductive features, as exemplified by Weiss et al. (2016) in discretizing the product of conductivity and cross-sectional area along cell edges, this approach does not readily extend to accounting for variations in magnetic permeability. As emphasized by Weiss et al. (2016) and (Weiss 2017), and subsequently demonstrated by Heagy and Oldenburg (2023) and others, magnetic permeability can exert a substantial influence on EM data. Effectively integrating variable permeability into EM modeling and inversion techniques represents a promising area for further exploration. Another pressing challenge revolves around refining upscaling techniques and modeling strategies for accurately representing thin, highly conductive structures within subsurface models. Despite notable progress, there remains ample room for developing more comprehensive solutions to address these features accurately. Furthermore, future research should prioritize the development of practical inversion strategies capable of efficiently and accurately reconstructing subsurface properties from EM data. While considerable efforts have been directed toward modeling to attain accurate EM responses, there is ample room for improvement in the realm of inversion. Some strategies developed to reduce computational requirements have yielded satisfactory results (Cuevas 2021; Orujov et al. 2022a), indicating that there is a path forward in inversion research. These strategies should harness the capabilities of present and near-future computational architectures, such as exascale computing, to meet the growing demands of EM modeling and inversion tasks. Additionally, there is a need to emphasize time-lapse inversion techniques, especially in applications involving dynamic subsurface processes. Finally, it is imperative to explore a wide array of applications in the realm of EM imaging. Beyond monitoring subsurface fluid reservoirs, there is a burgeoning interest in locating and characterizing orphaned and abandoned wells. This shift highlights the urgency of developing advanced EM techniques to address the environmental and safety concerns associated with these neglected well sites.
-
(ii)
Developing suitable test beds for 3D EM modeling and imaging that are benchmarks of different application contexts. While performing a 3D EM inversion of contaminated casing data may not be the most effective approach, conducting a thorough 3D EM modeling of the metallic structure is paramount. This step aids in comprehending the physical behavior of EM scattered fields and potentially mitigating their impact on real data. Furthermore, incorporating sensitivity studies into the modeling process further enhances our understanding and facilitates the removal of unwanted effects. Previous studies (e.g., Bøe et al. (2017) and Morten et al. (2017), both examining pipelines with real CSEM data) have demonstrated various strategies for identifying and correcting inherent effects within the data. These methods typically involve filtering or modifying the affected data prior to inversion. For instance, Orujov et al. (2022a) conducted a CSEM experiment with data contaminated by metal well effects, comparing inversion results with and without casing. These studies provide valuable insights for developing a comprehensive data bank.
-
(iii)
Developing even more robust EM workflows. The presence of metallic structures presents unique challenges, necessitating specialized modeling and imaging algorithms that account for interactions between EM fields and metallic materials in real-world scenarios with high accuracy and reliability. Addressing these challenges requires additional effort to explore and validate innovative approaches, such as DL-based and exascale HPC-enabled solutions for EM modeling and imaging. This progress could address four key aspects. First, it can solve the initial problem of establishing complete EM data for DL-based solutions (Puzyrev 2019). Second, while coupled physics-DL approaches can mitigate the severe dependence on data to some extent, the generalization of these DL-based EM schemes is widely questioned due to data dependency. Therefore, further research on the portability of trained DL models needs to be developed (Puzyrev 2019; Puzyrev and Swidinsky 2021). The third aspect should focus on DL-based solutions for multi-physics imaging, thus extending their applicability to complex and untested setups. Finally, increasing the maturity and democratization of exascale HPC-enabled EM workflows is essential for handling massive datasets with accuracy and computational efficiency. Analyzing emerging technologies and their potential, such as quantum computing (Piattini et al. 2021), is critical for the near future.
-
(iv)
Strengthening multidisciplinary research. This will encourage us further to advance our knowledge and interpretation ability of EM fields when metallic structures are presented. Although individual studies quantifying aspects of the EM field footprint are valuable in their own respect, the largest advances will be made by taking interdisciplinary approaches (geology, geophysics, EM engineering, mathematics, computer science, and data science) to develop the concepts behind EM imaging. The multi- and cross-disciplinary research should focus on obtaining better-resolved EM responses in scenarios incorporating multiple and even more realistic metallic structures, full electrical anisotropy, and IP at outer structure surface, among others.
Reviewing the developments of the past decade in EM modeling and inverse applications around metallic wells, we observe notable progress in methodologies and computational capabilities. However, significant challenges persist, particularly in enhancing target illumination around well casings. These hurdles are compounded by the complexities of subsurface environments, resource limitations, and the indispensable requirement for interdisciplinary collaboration. Additionally, technical issues like casing geometry continue to present ongoing challenges.
To establish the routine application of EM techniques around well casings, it is imperative to confront these multifaceted issues. This endeavor necessitates the advancement of modeling techniques, the seamless integration of diverse data types, substantial resource investments (equipment and computing), and a resolute commitment to environmental and safety considerations. Through these concerted efforts, we unlock a future marked by an enhanced understanding of the subsurface and sustainable resource management.
6 Conclusions
In this paper, we provide a comprehensive review of geo-electromagnetic modeling and imaging solutions in the presence of metallic structures. Our analysis framework encompasses the study of three aspects: physics behind metallic structures in EM modeling and imaging, development of computational tools (conventional strategies and artificial intelligence schemes), and configurations and applications.
We begin by discussing key insights regarding the impact of metallic structures on EM imaging. Next, we delve into a detailed analysis of the four most widely employed numerical methods in EM modeling and imaging: the FD, FV, IE, and FE methods. We also examine the role of meshing technologies in the numerical study of EM fields, considering their implications for accurate representation of complex geometries and small metallic structures. Furthermore, we explore modern computational techniques that address the challenges of solving current and next-generation geo-electromagnetic problems. This includes a discussion on LSE solvers, parallel computing strategies, and the integration of AI methods in EM modeling and imaging workflows. Additionally, we present an in-depth analysis of various configurations and applications within the context of EM modeling and imaging in the presence of metallic structures.
Our analysis primarily centers on vertical metal casings. However, we broaden our discussion to include other metallic infrastructures, recognizing that the conclusions drawn from this review are broadly applicable to these additional structures. The types of metallic structures present in the area where EM surveys are conducted can be quite diverse. The most common ones are wells (with metallic casing) and pipelines, both of which we have included in this review. Although they have different geometric characteristics (pipelines typically being horizontal and potentially compromising a lot of data, while wells are more local and deeper), the challenges and modeling strategies remain the same: Significant property contrast between the metallic structure and the surrounding rock necessitates refinement of meshes, while simultaneously dominating data on a much larger scale. Wells are of particular interest as they enable the illumination of deep structures considering sources at depth and allow for reservoir monitoring and tracking. Regarding monitoring, one might wonder if, when conducting time-lapse measurements (in the presence of any metallic structure), the effect of the structure remains minimal as changes in the data are considered. According to numerical simulations by Orujov et al. (2022b), casing effects are fully eliminated by subtracting time-lapse data and such infrastructure must be fully incorporated into forward models for time-lapse EM inversion. A very different problem arises when the location of the structure is unknown (as in the case of UXO or pipelines), and therefore cannot be modeled. In such cases, as mentioned earlier, strategies based on AI or ML must be employed, and there is much work to be done.
We identify the lack of standardized methodology for data acquisition, processing, and interpretation as the main limitation of this literature review. The variability in approaches and techniques across different studies makes it challenging to compare and generalize results. Furthermore, limited information on the accuracy and reliability of the models used adds complexity to the evaluation of methodologies. However, despite these challenges, this review provides valuable insights into the current state, challenges, and future directions of computational technologies for EM wavefield modeling and subsurface recovery in the presence of metallic structures. We anticipate that this review will foster interdisciplinary collaboration among physics, geophysics, mathematics, and computer science disciplines, enabling the rational design and reproducible construction of geological models in realistic applications.
References
Alumbaugh DL, Newman GA, Prevost L, Shadid JN (1996) Three-dimensional wideband electromagnetic modeling on massively parallel computers. Radio Sci 31(1):1–23
Amestoy P, Brossier R, Buttari A, L’Excellent J-Y, Mary T, Métivier L, Miniussi A, Operto S (2016) Fast 3D frequency-domain full-waveform inversion with a parallel block low-rank multifrontal direct solver: application to OBC data from the North Sea3D FD FWI with BLR direct solver. Geophysics 81(6):R363–R383
Anderson EC (2019) The effects of conductive well casings on electromagnetic surveys: experimental studies and numerical modelling, Colorado School of Mines
Araya-Polo M, Farris S, Florez M (2019) Deep learning-driven velocity model building workflow. Lead Edge 38(11):872a1-872a9
Ashena R, Thonhauser G (2015) Application of artificial neural networks in geoscience and petroleum industry. Artif Intell Approach Pet Geosci 127–166
Avdeev DB (2005) Three-dimensional electromagnetic modelling and inversion from theory to application. Surv Geophys 26(6):767–799
Avdeev DB, Kuvshinov AV, Pankratov OV, Newman GA (2002) Three-dimensional induction logging problems, part I: an integral equation solution and model comparisons. Geophysics 67(2):413–426
Axelsson O (1996) Iterative solution methods. Cambridge University Press, Cambridge
Baddari K, Aïfa T, Djarfour N, Ferahtia J (2009) Application of a radial basis function artificial neural network to seismic data inversion. Comput Geosci 35(12):2338–2344
Balay S, Abhyankar S, Adams M, Brown J, Brune P, Buschelman K, Dalcin L, Dener A, Eijkhout V, Gropp W et al (2019) PETSc users manual
Biswas R, Sen MK, Das V, Mukerji T (2019) Prestack and poststack inversion using a physics-guided convolutional neural network. Interpretation 7(3):SE161–SE174
Bøe L, Park J, Sauvin G, Vöge M (2017) Improvement of resistivity imaging for an offshore CO\(_2\) storage by filtering out seabed pipeline influence. In: EAGE/SEG Research Workshop 2017, cp–522, European Association of Geoscientists & Engineers
Börner R-U (2010) Numerical modelling in geo-electromagnetics: advances and challenges. Surv Geophys 31(2):225–245
Burnett DS (1987) Finite element analysis: from concepts to applications. Prentice Hall
Campanyà J, Ledo J, Queralt P, Marcuello A, Liesa M, Muñoz JA (2012) New geoelectrical characterisation of a continental collision zone in the west-central pyrenees: constraints from long period and broadband magnetotellurics. Earth Planet Sci Lett 333:112–121
Castillo-Reyes O, de la Puente J, Cela JM (2018) PETGEM: a parallel code for 3D CSEM forward modeling using edge finite elements. Comput Geosci 119:126–136. https://doi.org/10.1016/j.cageo.2018.07.005
Castillo-Reyes O, de la Puente J, García-Castillo LE, Cela JM (2019) Parallel 3D marine controlled-source electromagnetic modeling using high-order tetrahedral nédélec elements. Geophys J Int 219:39–65. https://doi.org/10.1093/gji/ggz285
Castillo-Reyes O, Queralt P, Marcuello A, Ledo J (2021) Land CSEM simulations and experimental test using metallic casing in a geothermal exploration context: Vallès basin (NE spain) Case Study. IEEE Trans Geosci Remote Sens. https://doi.org/10.1109/TGRS.2021.3069042
Castillo-Reyes O, Amor-Martin A, Botella A, Anquez P, García-Castillo LE (2022) Tailored meshing for parallel 3D electromagnetic modeling using high-order edge elements. J Comput Sci 63:101813. https://doi.org/10.1016/j.jocs.2022.101813
Castillo-Reyes O, Modesto D, Queralt P, Marcuello A, Ledo J, Amor-Martin A, de la Puente J, García-Castillo LE (2022) 3D magnetotelluric modeling using high-order tetrahedral nédélec elements on massively parallel computing platforms. Comput Geosci 160:105030. https://doi.org/10.1016/j.cageo.2021.105030
Castillo-Reyes O, Rulff P, Schankee Um E, Amor-Martin A (2023) Meshing strategies for 3D geo-electromagnetic modeling in the presence of metallic infrastructure. Comput Geosci. https://doi.org/10.1007/s10596-023-10247-w
Chambers JE, Kuras O, Meldrum PI, Ogilvy RD, Hollands J (2006) Electrical resistivity tomography applied to geologic, hydrogeologic, and engineering investigations at a former waste-disposal site. Geophysics 71(6):B231–B239
Chang P-Y, Chang L-C, Hsu S-Y, Tsai J-P, Chen W-F (2017) Estimating the hydrogeological parameters of an unconfined aquifer with the time-lapse resistivity-imaging method during pumping tests: case studies at the Pengtsuo and Dajou sites, Taiwan. J Appl Geophys 144:134–143
Chen J, Schäfer F, Huang J, Desbrun M (2021) Multiscale cholesky preconditioning for ill-conditioned problems. ACM Trans Graph (TOG) 40(4):1–13
Chiu C-C, Chien W, Yu K-X, Chen P-H, Lim EH (2023) Electromagnetic imaging for buried conductors using deep convolutional neural networks. Appl Sci 13(11)
Clemens M, Weiland T (2001) Discrete electromagnetism with the finite integration technique. Prog Electromagn Res 32:65–87
Coggon J (1971) Electromagnetic and electrical modeling by the finite element method. Geophysics 36(1):132–155
Colombo D, McNeice GW (2013) Quantifying surface-to-reservoir electromagnetics for waterflood monitoring in a Saudi Arabian carbonate reservoir. Geophysics 78(6):E281–E297
Colombo D, McNeice G, Cuevas N, Pezzoli M (2018) Surface to borehole electromagnetics for 3D waterflood monitoring: results from first field deployment. In: SPE annual technical conference and exhibition OnePetro
Commer M (2011) Three-dimensional gravity modelling and focusing inversion using rectangular meshes. Geophys Prospect 59(Modelling methods for geophysical imaging: trends and perspectives) 966–979
Commer M, Hoversten GM, Um ES (2015) Transient-electromagnetic finite-difference time-domain earth modeling over steel infrastructure. Geophysics 80(2):E147–E162
Constable S (2006) Marine electromagnetic methods-a new tool for offshore exploration. Lead Edge 25(4):438–444
Constable S (2010) Ten years of marine CSEM for hydrocarbon exploration. Geophysics 75(5):75A67–75A81
Conway D, Alexander B, King M, Heinson G, Kee Y (2019) Inverting magnetotelluric responses in a three-dimensional earth using fast forward approximations based on artificial neural networks. Comput Geosci 127:44–52
Coppo N, Darnet M, Harcouet-Menou V, Wawrzyniak P, Manzella A, Bretaudeau F, Romano G, Lagrou D, Girard J-F (2016) Characterization of deep geothermal energy resources in low enthalpy sedimentary basins in Belgium using electro-magnetic methods–CSEM and MT results. In: European Geothermal Congress 2016
Cuevas NH (2014) Analytical solutions of EM fields due to a dipolar source inside an infinite casing. Geophysics 79(5):E231–E241
Cuevas NH (2021) An approximate inversion scheme for surface-borehole electromagnetic in the presence of steel casing: 1D implementation. Geophysics 86(2):E111–E121
Cuevas NH (2022) Insights on electromagnetic scattering by steel casings in surface-to-borehole and borehole-to-surface methods. Lead Edge 41(2):93–99
Cuevas NH (2024) Insights on electromagnetic field distribution due to a vertical electric dipole source inside an infinite steel casing. Geophysics 89(2):E47–E59
Cuevas NH, Pezzoli M (2018) On the effect of the metal casing in surface-borehole electromagnetic methods. Geophysics 83(3):E173–E187
da Silva NV, Morgan JV, MacGregor L, Warner M (2012) A finite element multifrontal method for 3D CSEM modeling in the frequency domain. Geophysics 77(2):E101–E115
Dagostini JI, da Silva H CP, Pinto VG, Velho RM, Gastal ES, Schnorr LM (2021) Improving workload balance of a marine CSEM inversion application. In: 2021 IEEE international parallel and distributed processing symposium workshops (IPDPSW), pp 704–713. IEEE
Das V, Pollack A, Wollner U, Mukerji T (2019) Convolutional neural network for seismic impedance inversion CNN for seismic impedance inversion. Geophysics 84(6):R869–R880
Davis TA (2004) UMFPACK V4.3—an unsymmetric-pattern multifrontal method. ACM Trans Math Softw (TOMS) 30(2):196–199
Davydycheva S, Druskin V, Habashy T (2003) An efficient finite-difference scheme for electromagnetic logging in 3D anisotropic inhomogeneous media. Geophysics 68(5):1525–1536
Demirciİ (2022) 3-D modeling of airborne and land-based controlled-source electromagnetic data: comparison on CPU and GPU platform 2022(1):1–5
Di H, Li Z, Maniar H, Abubakar A (2020) Seismic stratigraphy interpretation by deep convolutional neural networks: a semisupervised workflow. Geophysics 85(4):WA77–WA86
Dmitriev V (1969) Electromagnetic fields in inhomogeneous media. Moscow State University
Druskin V, Knizhnerman L (1994) Spectral approach to solving three-dimensional Maxwell’s diffusion equations in the time and frequency domains. Radio Sci 29(4):937–953
Du Z, MacGregor LM (2010) Reservoir characterization from joint inversion of marine CSEM and seismic AVA data using genetic algorithms: a case study based on the Luva Gas field, in SEG Technical Program Expanded Abstracts 2010, pp 737–741. Society of Exploration Geophysicists
Duffy D (2001) Green’s functions with applications. CRC Press, Applied Mathematics
Eidesmo T, Ellingsrud S, MacGregor L, Constable S, Sinha M, Johansen S, Kong F, Westerdahl H (2002) Sea bed logging (SBL), a new method for remote and direct identification of hydrocarbon filled layers in deepwater areas. First Break 20(3):144–152
Eidsvik J, Bhattacharjya D, Mukerji T (2008) Value of information of seismic amplitude and CSEM resistivity. Geophysics 73(4):R59–R69
Elías MW, Zyserman FI, Rosas-Carbajal M, Manassero MC (2022) Three-dimensional modelling of controlled source electro-magnetic surveys using non-conforming finite element methods. Geophys J Int 229(2):1133–1151
Gandi O (1998) Advances in computational electrodynamics-the finite-difference time-domain method, Taflove, Ed., (Artech House, Boston)
Gillman A, Barnett A (2013) A fast direct solver for quasi-periodic scattering problems. J Comput Phys 248:309–322
Girard J-F, Coppo N, Rohmer J, Bourgeois B, Naudet V, Schmidt-Hattenberger C (2011) Time-lapse CSEM monitoring of the Ketzin (Germany) \(\text{ CO}_{2}\) injection using 2 \(\times \) MAM configuration. Energy Procedia 4:3322–3329
Grayver AV, Bürg M (2014) Robust and scalable 3-d geo-electromagnetic modelling approach using the finite element method. Geophys J Int 198(1):110–125
Grayver AV, Kolev TV (2015) Large-scale 3D geoelectromagnetic modeling using parallel adaptive high-order finite element method. Geophysics 80(6):E277–E291
Grayver AV, Streich R, Ritter O (2013) Three-dimensional parallel distributed inversion of CSEM data using a direct forward solver. Geophys J Int 193(3):1432–1446
Guo Z, Egbert G, Dong H, Wei W (2020) Modular finite volume approach for 3D magnetotelluric modeling of the Earth medium with general anisotropy. Phys Earth Planet Int 309:106585
Gupta A (2000) WSMP: Watson sparse matrix package (Part-I: direct solution of symmetric sparse systems), IBM TJ Watson Research Center, Yorktown Heights, NY. Tech. Rep, RC, p 21886
Haber E, Ascher UM (2001) Fast finite volume simulation of 3D electromagnetic problems with highly discontinuous coefficients. SIAM J Sci Comput 22(6):1943–1961
Haber E, Heldmann S (2007) An octree multigrid method for quasi-static Maxwell’s equations with highly discontinuous coefficients. J Comput Phys 223(2):783–796
Haber E, Heldmann S (2007) An octree multigrid method for quasi-static Maxwell’s equations with highly discontinuous coefficients. J Comput Phys 223(2):783–796
Haber E, Ascher U, Aruliah D, Oldenburg D (2000) Fast simulation of 3D electromagnetic problems using potentials. J Comput Phys 163(1):150–171
Haber E, Schwarzbach C, Shekhtman R (2016) Modeling electromagnetic fields in the presence of casing, in SEG Technical Program Expanded Abstracts 2016, pp 959–964, Society of Exploration Geophysicists
Hansen KR, Mittet R (2009) Incorporating seismic horizons in inversion of CSEM data, in SEG Technical Program Expanded Abstracts 2009, pp 694–698, Society of Exploration Geophysicists
Harris P, MacGregor L (2006) Determination of reservoir properties from the integration of CSEM, seismic, and well-log data. First Break 24(11)
Harris P, Du Z, MacGregor L, Olsen W, Shu R, Cooper R (2009) Joint interpretation of seismic and CSEM data using well log constraints: an example from the Luva field. First Break 27(5)
Heagy LJ, Oldenburg DW (2019) Modeling electromagnetics on cylindrical meshes with applications to steel-cased wells. Comput Geosci 125:115–130
Heagy LJ, Oldenburg DW (2019) Direct current resistivity with steel-cased wells. Geophys J Int 219(1):1–26
Heagy LJ, Oldenburg DW (2022) Electrical and electromagnetic responses over steel-cased wells. Lead Edge 41(2):83–92
Heagy LJ, Oldenburg DW (2023) Impacts of magnetic permeability on electromagnetic data collected in settings with steel-cased wells. Geophys J Int 234(2):1092–1110
Heagy LJ, Cockett R, Kang S, Rosenkjaer GK, Oldenburg DW (2017) A framework for simulation and inversion in electromagnetics. Comput Geosci 107:1–19
Heagy LJ, Oldenburg DW, Pérez F, Beran L (2020) Machine learning for the classification of unexploded ordnance (UXO) from electromagnetic data. In: SEG international exposition and annual meeting, p D031S068R005, SEG
Helsing J, Karlsson A, Rosén A (2022) An efficient full-wave solver for eddy currents. Comput Math Appl 128:145–162
Hénon P, Ramet P, Roman J (2002) PaStiX: a high-performance parallel direct solver for sparse symmetric positive definite systems. Parallel Comput 28(2):301–321
Hermeline F (2009) A finite volume method for approximating 3D diffusion operators on general meshes. J Comput Phys 228(16):5763–5786
Hohmann GW (1971) Electromagnetic scattering by conductors in the earth near a line source of current. Geophysics 36(1):101–131
Hohmann GW (1975) Three-dimensional induced polarization and electromagnetic modeling. Geophysics 40(2):309–324
Holladay JS, West G (1984) Effect of well casings on surface electrical surveys. Geophysics 49(2):177–188
Holland R (1983) Finite-difference solution of Maxwell’s equations in generalized nonorthogonal coordinates. IEEE Trans Nucl Sci 30(6):4589–4591
Hördt A, Druskin VL, Knizhnerman LA, Strack K-M (1992) Interpretation of 3-D effects in long-offset transient electromagnetic (LOTEM) soundings in the Münsterland area (Germany). Geophysics 57(9):1127–1137
Hördt A, Dautel S, Tezkan B, Thern H (2000) Interpretation of long-offset transient electromagnetic data from the Odenwald area, Germany, using two-dimensional modelling. Geophys J Int 140(3):577–586
Hoversten GM, Commer M, Haber E, Schwarzbach C (2015) Hydro-frac monitoring using ground time-domain electromagnetics. Geophys Prospect 63(6):1508–1526
Hu Y, Yang D (2021) 3D finite volume modeling of steel casings in controlled source electromagnetic surveys using the concept of edge conductivity. In: SEG/AAPG/SEPM First international meeting for applied geoscience & energy, OnePetro
Hue Y-K, Teixeira FL, Martin LS, Bittar MS (2005) Three-dimensional simulation of eccentric LWD tool response in boreholes through dipping formations. IEEE Trans Geosci Remote Sens 43(2):257–268
Iturrarán-Viveros U, Muñoz-García AM, Castillo-Reyes O, Shukla K (2021) Machine learning as a seismic prior velocity model building method for full-waveform inversion: a case study from Colombia. Pure Appl Geophys 178(2):423–448
Jahandari H, Farquharson CG (2014) A finite-volume solution to the geophysical electromagnetic forward problem using unstructured grids. Geophysics 79(6):E287–E302
Jahandari H, Ansari S, Farquharson CG (2017) Comparison between staggered grid finite-volume and edge-based finite-element modelling of geophysical electromagnetic data on unstructured grids. J Appl Geophys 138:185–197
Janaswamy R, Liu Y (1997) An unstaggered colocated finite-difference scheme for solving time-domain Maxwell’s equations in curvilinear coordinates. IEEE Trans Antennas Propag 45(11):1584–1591
Jin J-M (2015) The finite element method in electromagnetics. Wiley, Hoboken
Jin J-M, Zunoubi M, Donepudi KC, Chew WC (1999) Frequency-domain and time-domain finite-element solution of Maxwell’s equations using spectral lanczos decomposition method. Comput Methods Appl Mech Eng 169(3–4):279–296
Kang S, Oldenburg DW (2016) On recovering distributed IP information from inductive source time domain electromagnetic data. Geophys J Int 207(1):174–196
Kaufman AA (1990) The electrical field in a borehole with a casing. Geophysics 55(1):29–38
Kaufman AA, Wightman WE (1993) A transmission-line model for electrical logging through casing. Geophysics 58(12):1739–1747
Key K, Ovall J (2011) A parallel goal-oriented adaptive finite element method for 2.5-D electromagnetic modelling. Geophys J Int 186(1):137–154
Klanica R, Pek J, Hill G (2023) Magnetotelluric power line noise removal using temporally varying sinusoidal subtraction of the grid utility frequency. Pure Appl Geophys 1–15
Kohnke C, Liu L, Streich R, Swidinsky A (2018) A method of moments approach to model the electromagnetic response of multiple steel casings in a layered earth. Geophysics 83(2):WB81–WB96
Koldan J, Puzyrev V, de la Puente J, Houzeaux G, Cela JM (2014) Algebraic multigrid preconditioning within parallel finite-element solvers for 3-D electromagnetic modelling problems in geophysics. Geophys J Int 197(3):1442–1458
Kong F, Roth F, Olsen P, Stalheim S (2009) Casing effects in the sea-to-borehole electromagnetic method. Geophysics 74(5):F77–F87
Ledo J, Queralt P, Martí A, Jones AG (2002) Two-dimensional interpretation of three-dimensional magnetotelluric data: an example of limitations and resolution. Geophys J Int 150(1):127–139
Lee HO, Teixeira FL (2007) Cylindrical FDTD analysis of LWD tools through anisotropic dipping-layered earth media. IEEE Trans Geosci Remote Sens 45(2):383–388
Lee HO, Teixeira FL, San Martin LE, Bittar MS (2011) Numerical modeling of eccentered LWD borehole sensors in dipping and fully anisotropic earth formations. IEEE Trans Geosci Remote Sens 50(3):727–735
Lewis W, Vigh D (2017) Deep learning prior models from seismic images for full-waveform inversion. In: SEG technical program expanded abstracts 2017, pp 1512–1517. Society of Exploration Geophysicists
Li XS (2005) An overview of SuperLU: algorithms, implementation, and user interface. ACM Trans Math Softw (TOMS) 31(3):302–325
Li XS, Demmel JW (2003) SuperLU_DIST: a scalable distributed-memory sparse direct solver for unsymmetric linear systems. ACM Trans Math Softw (TOMS) 29(2):110–140
Li Y, Yang D (2021) Electrical imaging of hydraulic fracturing fluid using steel-cased wells and a deep-learning method. Geophysics 86(4):E315–E332
Mackie RL, Smith JT, Madden TR (1994) Three-dimensional electromagnetic modeling using finite difference equations: the magnetotelluric example. Radio Sci 29(4):923–935
Madsen NK, Ziolkowski RW (1990) A three-dimensional modified finite volume technique for Maxwell’s equations. Electromagnetics 10(1–2):147–161
Manoj C, Nagarajan N (2003) The application of artificial neural networks to magnetotelluric time-series analysis. Geophys J Int 153(2):409–423
Mörbe W, Yogeshwar P, Tezkan B, Hanstein T (2020) Deep exploration using long-offset transient electromagnetics: interpretation of field data in time and frequency domain. Geophys Prospect 68(6):1980–1998
Morten J, Berre L, de Ryhove SdlK, Markhus V (2017) 3D CSEM inversion of data affected by infrastructure. In: 79th EAGE conference and exhibition 2017, vol. 2017, pp 1–5. European Association of Geoscientists & Engineers
Mulder W (2006) A multigrid solver for 3D electromagnetic diffusion. Geophys Prospect 54(5):633–649
Mur G (1991) Finite-element modeling of three-dimensional electromagnetic fields in inhomogeneous media. Radio Sci 26(01):275–280
Newman G, Alumbaugh D (1997) Three-dimensional massively parallel electromagnetic inversion-I. Theory. Geophys J Int 128(2):345–354
Newman GA (2014) A review of high-performance computational strategies for modeling and imaging of electromagnetic induction data. Surv Geophys 35(1):85–100
Newman GA, Alumbaugh DL (2002) Three-dimensional induction logging problems, part 2: a finite-difference solution. Geophysics 67(2):484–491
Nédélec J-C (1980) Mixed finite elements in R3 35(3):315–341
Orange A, Key K, Constable S (2009) The feasibility of reservoir monitoring using time-lapse marine CSEM. Geophysics 74(2):F21–F29
Oristaglio M, Spies B (1999) Three-dimensional electromagnetics. Society of Exploration Geophysicists
Orujov G, Anderson E, Streich R, Swidinsky A (2020) On the electromagnetic response of complex pipeline infrastructure. Geophysics 85(6):E241–E251
Orujov G, Streich R, Swidinsky A (2022) Modeling and inversion of electromagnetic data collected over steel casings: an analysis of two controlled field experiments in Colorado. Lead Edge 41(2):114–121
Orujov G, Swidinsky A, Streich R (2022) Do metal infrastructure effects cancel out in time-lapse electromagnetic measurements? Geophysics 87(2):E91–E101
Osseyran A, Giles M (2015) Industrial applications of high-performance computing: best global practices, vol. 25, CRC Press
Ozkaya U, Seyfi L (2018) Deep dictionary learning application in GPR b-scan images. SIViP 12:1567–1575
Pádua MB, Padilha AL, Vitorello Í (2002) Disturbances on magnetotelluric data due to DC electrified railway: a case study from southeastern Brazil. Earth Planets Space 54(5):591–596
Panda S, Akhter Z, Akhtar MJ (2016) Subsurface imaging of concrete structures using neural network approach. In: 2016 IEEE MTT-S international microwave and RF conference (IMaRC), pp 1–4. IEEE
Pankratov O, Kuvshinov A (2016) Applied mathematics in EM studies with special emphasis on an uncertainty quantification and 3-D integral equation modelling. Surv Geophys 37:109–147
Park J, Sauvin G, Vöge M (2017) 2.5 D inversion and joint interpretation of CSEM data at Sleipner CO\(_{2}\) storage. Energy Procedia 114:3989–3996
Patzer C, Tietze K, Ritter O (2017) Steel-cased wells in 3-D controlled source EM modelling. Geophys J Int 209(2):813–826
Piattini M, Peterssen G, Pérez-Castillo R (2021) Quantum computing: a new software engineering golden age. ACM SIGSOFT Softw Eng Notes 45(3):12–14
Piña-Varas P, Ledo J, Queralt P, Marcuello A, Bellmunt F, Ogaya X, Pérez N, Rodriguez-Losada J (2015) Vertical collapse origin of Las Cañadas caldera (Tenerife, Canary Islands) revealed by 3-D magnetotelluric inversion. Geophys Res Lett 42(6):1710–1716
Puzyrev V (2019) Deep learning electromagnetic inversion with convolutional neural networks. Geophys J Int 218(2):817–832
Puzyrev V, Swidinsky A (2021) Inversion of 1D frequency-and time-domain electromagnetic data with convolutional neural networks. Comput Geosci 149:104681
Puzyrev V, Koldan J, de la Puente J, Houzeaux G, Vázquez M, Cela JM (2013) A parallel finite-element method for three-dimensional controlled-source electromagnetic forward modelling. Geophys J Int 193(2):678–693
Puzyrev V, Vilamajo E, Queralt P, Ledo J, Marcuello A (2017) Three-dimensional modeling of the casing effect in onshore controlled-source electromagnetic surveys. Surv Geophys 38(2):527–545
Qi X (2023) Three-dimensional inversion of controlled-source electromagnetic data for surveying the Jiutianshan high-speed railway tunnel, China. J Appl Geophys 209:104901
Qian W, Boerner D (1995) Electromagnetic modelling of buried line conductors using an integral equation. Geophys J Int 121(1):203–214
Queralt P, Jones AG, Ledo J (2007) Electromagnetic imaging of a complex ore body: 3D forward modeling, sensitivity tests, and down-mine measurements. Geophysics 72(2):F85–F95
Raiche A (1974) An integral equation approach to three-dimensional modelling. Geophys J Int 36(2):363–376
Reeck K, Müller H, Hölz S, Haroon A, Schwalenberg K, Jegen M (2020) Effects of metallic system components on marine electromagnetic loop data. Geophys Prospect 68(7):2254–2270
Ren Z, Kalscheuer T, Greenhalgh S, Maurer H (2013) A goal-oriented adaptive finite-element approach for plane wave 3-D electromagnetic modelling. Geophys J Int 194(2):700–718
Rijo L (1977) Modeling of electric and electromagnetic data. Ph.D. thesis, The University of Utah
Rochlitz R, Skibbe N, Günther T (2019) custEM: customizable finite-element simulation of complex controlled-source electromagnetic data. Geophysics 84(2):F17–F33
Rodi WL (1976) A technique for improving the accuracy of finite element solutions for magnetotelluric data. Geophys J Int 44(2):483–506
Schenk O, Gärtner K (2004) Solving unsymmetric sparse systems of linear equations with PARDISO. Futur Gener Comput Syst 20(3):475–487
Schenkel CJ, Morrison HF (1990) Effects of well casing on potential field measurements using downhole current sources. Geophys Prospect 38(6):663–686
Schwarzbach C (2009) Stability of finite element solutions to Maxwell’s equations in frequency domain. Ph.D. thesis
Schwarzbach C, Börner R-U, Spitzer K (2011) Three-dimensional adaptive higher order finite element simulation for geo-electromagnetics-a marine CSEM example. Geophys J Int 187(1):63–74
Shahriari M, Pardo D, Moser B, Sobieczky F (2020) A deep neural network as surrogate model for forward simulation of borehole resistivity measurements. Procedia Manuf 42:235–238
Shahriari M, Pardo D, Picón A, Galdran A, Del Ser J, Torres-Verdín C (2020) A deep learning approach to the inversion of borehole resistivity measurements. Comput Geosci 24(3):971–994
Shahriari M, Pardo D, Rivera JA, Torres-Verdín C, Picon A, Del Ser J, Ossandon S, Calo VM (2021) Error control and loss functions for the deep learning inversion of borehole resistivity measurements. Int J Numer Methods Eng 122(6):1629–1657
Shalf J, Dosanjh S, Morrison J (2011) Exascale computing technology challenges. In: High performance computing for computational science–VECPAR 2010: 9th international conference, Berkeley, CA, USA, June 22–25, 2010, Revised Selected Papers 9, pp 1–25. Springer
Shantsev DV, Jaysaval P, De LK, De Ryhove S, Amestoy PR, Buttari A, l’Excellent J-Y, T M (2017) Large-scale 3-D EM modelling with a block low-rank multifrontal direct solver. Geophys J Int 209(3):1558–1571
Sheard S, Ritchie T, Christopherson KR, Brand E (2005) Mining, environmental, petroleum, and engineering industry applications of electromagnetic techniques in geophysics. Surv Geophys 26(5):653–669
Shlager KL, Schneider JB (1995) A selective survey of the finite-difference time-domain literature. IEEE Antennas Propag Mag 37(4):39–57
Siahkoohi A, Rizzuti G, Herrmann F (2020) A deep-learning based Bayesian approach to seismic imaging and uncertainty quantification. In: EAGE 2020 annual conference & exhibition online, vol. 2020, pp 1–5. European Association of Geoscientists & Engineers
Siemon B, Steuer A, Ullmann A, Vasterling M, Voß W (2011) Application of frequency-domain helicopter-borne electromagnetics for groundwater exploration in urban areas. Phys Chem Earth Parts A/B/C 36(16):1373–1385
Sill WR, Ward SH (1978) Electrical energizing of well casings. University of Utah, Department of Geology and Geophysics
Sommer M, Hölz S, Moorkamp M, Swidinsky A, Heincke B, Scholl C, Jegen M (2013) GPU parallelization of a three dimensional marine CSEM code. Comput Geosci 58:91–99
Spitzer K (2022) Electromagnetic modeling using adaptive grids—a reflection on the term geometry. In: 25th EM induction workshop, vol 2022, pp 1–5. International Association of Geomagnetism and Aeronomy
Srnka LJ, Carazzone JJ, Ephron MS, Eriksen EA (2006) Remote reservoir resistivity mapping. Lead Edge 25(8):972–975
Streich R (2009) 3D finite-difference frequency-domain modeling of controlled-source electromagnetic data: direct solution and optimization for high accuracy. Geophysics 74(5):F95–F105
Streich R (2016) Controlled-source electromagnetic approaches for hydrocarbon exploration and monitoring on land. Surv Geophys 37:47–80
Streich R, Swidinsky A (2023) On method-of-moments modelling of electromagnetic sources connected to metallic well casings. Geophys J Int 234(2):1476–1483
...Sun Z, Sandoval L, Crystal-Ornelas R, Mousavi SM, Wang J, Lin C, Cristea N, Tong D, Carande WH, Ma X, Rao Y, Bednar JA, Tan A, Wang J, Purushotham S, Gill TE, Chastang J, Howard D, Holt B, Gangodagamage C, Zhao P, Rivas P, Chester Z, Orduz J, John A (2022) A review of Earth artificial intelligence. Comput Geosci 159:105034
Swidinsky A, Edwards RN, Jegen M (2013) The marine controlled source electromagnetic response of a steel borehole casing: applications for the NEPTUNE Canada gas hydrate observatory. Geophys Prospect 61(4):842–856
Tang W, Li Y, Swidinsky A, Liu J (2015) Three-dimensional controlled-source electromagnetic modelling with a well casing as a grounded source: a hybrid method of moments and finite element scheme. Geophys Prospect 63(6):1491–1507
Tietze K, Ritter O, Veeken P (2015) Controlled-source electromagnetic monitoring of reservoir oil saturation using a novel borehole-to-surface configuration. Geophys Prospect 63(6):1468–1490
Tveit S, Mannseth T, Park J, Sauvin G, Agersborg R (2020) Combining CSEM or gravity inversion with seismic AVO inversion, with application to monitoring of large-scale CO\(_{2}\) injection. Comput Geosci 24(3):1201–1220
Um ES, Commer M, Newman GA (2013) Efficient pre-conditioned iterative solution strategies for the electromagnetic diffusion in the Earth: finite-element frequency-domain approach. Geophys J Int p ggt071
Um ES, Commer M, Newman GA, Hoversten GM (2015) Finite element modelling of transient electromagnetic fields near steel-cased wells. Geophys J Int 202(2):901–913
Um ES, Kim S-S, Fu H (2017) A tetrahedral mesh generation approach for 3D marine controlled-source electromagnetic modeling. Comput Geosci 100:1–9
Um ES, Kim J, Wilt M (2020) 3D borehole-to-surface and surface electromagnetic modeling and inversion in the presence of steel infrastructure. Geophysics 85(5):E139–E152
Van der Baan M, Jutten C (2000) Neural networks in geophysical applications. Geophysics 65(4):1032–1047
Vilamajó E, Queralt P, Ledo J, Marcuello A (2013) Feasibility of monitoring the Hontomín (Burgos, Spain) CO\(_{2}\) storage site using a deep EM source. Surv Geophys 34(4):441–461
Vilamajó E, Rondeleux B, Queralt P, Marcuello A, Ledo J (2015) A land controlled-source electromagnetic experiment using a deep vertical electric dipole: experimental settings, processing, and first data interpretation. Geophys Prospect 63(6):1527–1540
Vilamajó E, Puzyrev V, Queralt P, Marcuello A, Ledo J (2016) Study of the casing effect on borehole-to-surface onshore CSEM. In: 78th EAGE conference and exhibition 2016, vol. 2016, pp 1–5. European Association of Geoscientists & Engineers
Wait JR (1972) The effect of a buried conductor on the subsurface fields for line source excitation. Radio Sci 7(5):587–591
Wait JR, Hill DA (1973) Excitation of a homogeneous conductive cylinder of finite length by a prescribed axial current distribution. Radio Sci 8(12):1169–1176
Wan Y, Li T, Wang P, Duan S, Zhang C, Li N (2021) Robust and efficient classification for underground metal target using dimensionality reduction and machine learning. IEEE Access 9:7384–7401
Wannamaker PE (1991) Advances in three-dimensional magnetotelluric modeling using integral equations. Geophysics 56(11):1716–1728
Wannamaker PE, Hohmann GW, SanFilipo WA (1984) Electromagnetic modeling of three-dimensional bodies in layered earths using integral equations. Geophysics 49(1):60–74
Wannamaker PE, Stodt JA, Rijo L (1986) Two-dimensional topographic responses in magnetotellurics modeled using finite elements. Geophysics 51(11):2131–2144
Wannamaker PE, Stodt JA, Rijo L (1987) A stable finite element solution for two-dimensional magnetotelluric modelling. Geophys J Int 88(1):277–296
Ward SH, Hohmann GW (1988) Electromagnetic theory for geophysical applications. In: Electromagnetic Methods in Applied Geophysics: Voume 1, Theory, pp 130–311. Society of Exploration Geophysicists
Weiss CJ (2017) Finite-element analysis for model parameters distributed on a hierarchy of geometric simplices. Geophysics 82(4):E155–E167
Weiss CJ, Aldridge DF, Knox HA, Schramm KA, Bartel LC (2016) The direct-current response of electrically conducting fractures excited by a grounded current source. Geophysics 81(3):E201–E210
Werthmüller D (2017) An open-source full 3D electromagnetic modeler for 1D VTI media in Python: empymod. Geophysics 82(6):WB9–WB19
Werthmüller D, Rochlitz R, Castillo-Reyes O, Heagy L (2021) Towards an open-source landscape for 3-D CSEM modelling. Geophys J Int 227(1):644–659. https://doi.org/10.1093/gji/ggab238
Wilt M, Alumbaugh D (2003) Oil field reservoir characterization and monitoring using electromagnetic geophysical techniques. J Petrol Sci Eng 39(1–2):85–97
Wilt MJ, Um ES, Nichols E, Weiss CJ, Nieuwenhuis G, MacLennan K (2020) Casing integrity mapping using top-casing electrodes and surface-based electromagnetic fields. Geophysics 85(1):E1–E13
Wirianto M, Mulder W, Slob E (2010) A feasibility study of land CSEM reservoir monitoring in a complex 3-D model. Geophys J Int 181(2):741–755
Wu X, Habashy TM (1994) Influence of steel casings on electromagnetic signals. Geophysics 59(3):378–390
Xie Z, Chan C-H, Zhang B (2002) An explicit fourth-order orthogonal curvilinear staggered-grid FDTD method for Maxwell’s equations. J Comput Phys 175(2):739–763
Xiong W, Ji X, Ma Y, Wang Y, AlBinHassan NM, Ali MN, Luo Y (2018) Seismic fault detection with convolutional neural network. Geophysics 83(5):O97–O103
Xiong Z, Tripp AC (1997) 3-D electromagnetic modeling for near-surface targets using integral equations. Geophysics 62(4):1097–1106
Yang D, Oldenburg DW (2012) Three-dimensional inversion of airborne time-domain electromagnetic data with applications to a porphyry deposit. Geophysics 77(2):B23–B34
Yang D, Oldenburg DW (2016) Survey decomposition: a scalable framework for 3D controlled-source electromagnetic inversion. Geophysics 81(2):E69–E87
Yang D, Oldenburg D, Heagy L (2016) 3D DC resistivity modeling of steel casing for reservoir monitoring using equivalent resistor network. In: 2016 SEG international exposition and annual meeting, OnePetro
Yang D, Guan S, Chen Z (2019) Parallel 3D modeling of marine controlled source electromagnetic data using survey decomposition. In: SEG international exposition and annual meeting, p D033S068R001, SEG
Yang F, Ma J (2019) Deep-learning inversion: a next-generation seismic velocity model building method. Geophysics 84(4):R583–R599
Yang P (2021) Boost the efficiency of 3D CSEM modelling using graphics processing units. In: 82nd EAGE annual conference & exhibition, vol. 2021, pp 1–5. European Association of Geoscientists & Engineers
Yang P (2023) libEMM: a fictious wave domain 3D CSEM modelling library bridging sequential and parallel GPU implementation. Comput Phys Commun 288:108745
Yang W, Torres-Verdín C, Hou J, Zhang Z (2009) 1D subsurface electromagnetic fields excited by energized steel casing. Geophysics 74(4):E159–E180
Yee K (1966) Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media. IEEE Trans Antennas Propag 14(3):302–307
Zhang G, Zhang G-B, Chen C-C, Chang P-Y, Wang T-P, Yen H-Y, Dong J-J, Ni C-F, Chen S-C, Chen C-W et al (2016) Imaging rainfall infiltration processes with the time-lapse electrical resistivity imaging method. Pure Appl Geophys 173(6):2227–2239
Zhdanov MS (2009) Geophysical electromagnetic theory and methods, vol. 43, Elsevier
Zhdanov MS, Wannamaker PE (2002) Three-dimensional electromagnetics. In: Proceedings of the second international symposium. Elsevier
Zhdanov MS, Lee SK, Yoshioka K (2006) Integral equation method for 3D modeling of electromagnetic fields in complex structures with inhomogeneous background conductivity. Geophysics 71(6):G333–G345
Zheng Y, Zhang Q, Yusifov A, Shi Y (2019) Applications of supervised deep learning for seismic interpretation and inversion. Lead Edge 38(7):526–533
Zhu G, Gao M, Kong F, Li K (2020) A fast inversion of induction logging data in anisotropic formation based on deep learning. IEEE Geosci Remote Sens Lett 17(12):2050–2054
Zhu Y, Cangellaris A (2006) Multigrid Finite Element Methods for Electromagnetic Field Modeling. IEEE Press Series on Electromagnetic Wave Theory, Wiley
Zyserman FI, Santos JE (2000) Parallel finite element algorithm with domain decomposition for three-dimensional magnetotelluric modelling. J Appl Geophys 44(4):337–351
Acknowledgements
The work of O.C-R., P.Q., P.P., and J. L. have received funding from the MCIN/AEI /10.13039/501100011033 (Spain) and from the European Union NextGenerationEU/PRTR under the project GEOTHERPAL-EM_TED2021-131882B-C42 and -C41.
Funding
Open Access funding provided thanks to the CRUE-CSIC agreement with Springer Nature.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Castillo-Reyes, O., Queralt, P., Piñas-Varas, P. et al. Electromagnetic Subsurface Imaging in the Presence of Metallic Structures: A Review of Numerical Strategies. Surv Geophys (2024). https://doi.org/10.1007/s10712-024-09855-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10712-024-09855-7