
Abstract
The goal of this paper is to characterize the dynamic behavior of porous materials containing parallel cylindrical voids. Unlike static approaches, micro-inertia effects are accounted for in the modeling which infer a strong dependence of the dynamic response upon void geometry. Since cylindrical voids are considered, the void radius and void length both play a crucial role in the overall response of the porous material. A theoretical approach is developed, founded on the dynamic homogenization scheme proposed by Molinari and Mercier (J Mech Phys Solids 49:1497–1516, 2001) for spherical voids embedded in a viscoplastic matrix material. Considering a cylindrical unit cell, a constitutive response of porous material containing cylindrical void is developed for general homogeneous boundary conditions. For illustrative purpose, the analysis focuses on axisymmetric loadings considering a perfectly plastic matrix material. Micro-inertia effects are exemplified considering various loading conditions such as, among others, spherical loading and plane strain loading. In particular, the peculiar effect of the length of the cylindrical void is revealed. Indeed, particular attention has been paid to the response of short and elongated cylindrical voids. All predictions of the present model are verified against numerical simulations developed for various axisymmetric loading paths. Our findings can be used in several applications such as thick wall honeycomb structures or additively manufactured materials submitted to dynamic loading.














Similar content being viewed by others

Abbreviations
- \(a_0,\ a\) :
-
Initial and current void radii
- \(b_0,\ b\) :
-
Initial and current cell external radii
- \(\mathbf{d},\ \mathbf{D}\) :
-
Microscopic (local) and macroscopic strain rate tensors
- \(f_0,\ f\) :
-
Initial and current porosities
- \(\mathbf{L}\) :
-
Macroscopic velocity gradient tensor
- \(l_0,\ l\) :
-
Initial and current void half lengths
- \((O,\ \mathbf{e}_1,\ \mathbf{e}_2,\ \mathbf{e}_3)\) :
-
Cartesian coordinate system
- t :
-
Time
- \(\mathbf{v}\) :
-
Velocity field
- \(V,\ \delta V\) :
-
Volume and boundary of the RVE
- \(\varvec{x}\) :
-
Position vector
- \(\tilde{\varvec{x}}\) :
-
Projection in the plane (\(\mathbf{e}_1,\mathbf{e}_2\)) of the position vector \(\varvec{x}\)
- \(\varvec{\gamma }\) :
-
Acceleration vector
- \(\varvec{\varOmega }\) :
-
Macroscopic spin tensor
- \(\rho \) :
-
Matrix mass density
- \(\varvec{\sigma },\ \varvec{\varSigma }\) :
-
Microscopic (local) and macroscopic stress tensors
- \(\tilde{\sigma },\ \sigma _0\) :
-
Effective stress and yield stress in the matrix
- \({\varvec{\varSigma }}^\text {static},\ {\varvec{\varSigma }}^\text {dyn}\) :
-
Static and dynamic stress tensors
- \(\varPhi \) :
-
Stress potential
- \(\varPhi _\text {G}\) :
-
Gurson yield function
- \(\bar{\mathbf{d}},\ \bar{\varvec{\gamma }}\) :
-
Strain rate and acceleration derived from the trial velocity field \(\bar{\mathbf{v}}\)
References
Budiansky B, Hutchinson JW, Slutsky S (1982) Void growth and collapse in viscous solids. In: Hopkins HG, Sewell MJ (eds) Mechanics of solids. Pergamon Press, Oxford
Carroll MM, Holt AC (1972) Static and dynamic pore collapse relations for ductile porous materials. J Appl Phys 43(4):1626–1636
Czarnota C, Mercier S, Molinari A (2006) Modelling of nucleation and void growth in dynamic pressure loading, application to spall test on tantalum. Int J Fract 141:177–194
Czarnota C, Jacques N, Mercier S, Molinari A (2008) Modelling of dynamic ductile fracture and application to the simulation of plate impact tests on tantalum. J Mech Phys Solids 56:1624–1650
Czarnota C, Molinari A, Mercier S (2017) The structure of steady shock waves in porous metals. J Mech Phys Solids 107:204–228
Eftis J, Nemes JA (1992) Modelling of impact-induced spall fracture and post spall behavior of a circular plate. Int J Fract 53:301–324
Freund LB, Hutchinson JW, Lam PS (1986) Analysis of high-strain-rate elastic-plastic crack growth. Eng Fract Mech 23(1):119–129
Glennie EB (1972) The dynamic growth of a void in a plastic material and application to fracture. J Mech Phys Solids 20:415–429
Gologanu M, Leblond JB, Devaux J (1993) Approximate models for ductile metals containing nonspherical voids—case of axisymmetric prolate ellipsoidal cavities. J Mech Phys Solids 41:1723–1754
Gurson AL (1977) Continuum theory of ductile rupture by void nucleation and growth: part \(\rm I\)—yield criteria and flow rules for porous ductile media. J Eng Mater Technol 99:2–15
Jacques N, Czarnota C, Mercier S, Molinari A (2010) A micromechanical constitutive model for dynamic damage and fracture of ductile materials. Int J Fract 162:159–175
Johnson JN (1981) Dynamic fracture and spallation in ductile solids. J Appl Phys 52:2812–2825
Klöcker H (1991) Analyse théorique de la croissance d’une cavité dans un matériau viscoplastique. Ph.D. thesis, Ecole Nationale Supérieure des Mines de Saint Etienne, France
Leblond J, Perrin G, Suquet P (1994) Exact results and approximate models for porous viscoplastic solids. Int J Plast 10(3):213–235
Leblond JB, Roy G (2000) A model for dynamic ductile behavior applicable for arbitrary triaxialities. Comptes Rendus de l’Académie des Sciences 328(5):381–386
McClintock FM (1968) A criterion for ductile fracture by the growth of holes. J Appl Mech 35:363–371
Molinari A, Mercier S (2001) Micromechanical modelling of porous materials under dynamic loading. J Mech Phys Solids 49:1497–1516
Molinari A, Jacques N, Mercier S, Leblond JB, Benzerga AA (2015) A micromechanical model for the dynamic behavior of porous media in the void coalescence stage. Int J Solids Struct 71:1–18
Ortiz M, Molinari A (1992) Effect of strain hardening and rate sensitivity on the dynamic growth of a void in a plastic material. J Appl Mech 114:48–53
Plesset MS (1949) The dynamics of cavitation bubbles. J Appl Mech 16:222–282
Rayleigh JWS (1917) Pressure developped in a liquid during the collapse of a spherical cavity. Philo Mag 34:94–98
Rice JR, Tracey D (1969) On the ductile enlargement of voids in triaxial stress fields. J Mech Phys Solids 17:201–217
Roy G (2003) Vers une modélisation approfondie de l’endommagement ductile dynamique. Investigation expérimentale d’une nuance de tantale et développements théoriques. Ph.D. thesis, Ecole Nationale Supérieure de Mécanique et d’Aéronautique, Université de Poitiers, France
Sartori C, Mercier S, Jacques N, Molinari A (2015) Constitutive behavior of porous ductile materials accounting for micro-inertia and void shape. Mech Mater 80:324–339
Sartori C, Mercier S, Molinari A (2019) Analytical expression of mechanical fields for gurson type porous models. Int J Solids Struct 163:25–39
Simo JC, Hughes TJR (1998) Computational inelasticity, Interdisciplinary applied mathematics. Springer, Berlin
Tong W, Ravichandran G (1995) Inertial effects on void growth in porous viscoplastic materials. J Appl Mech 62:633–639
Torki M, Benzerga A, Leblond JB (2015) On void coalescence under combined tension and shear. J Inst Met 82(7):1–15
Torki M, Tekoglu C, Leblond JB, Benzerga A (2017) Theoretical and numerical analysis of void coalescence in porous ductile solids under arbitrary loadings. Int J Plast 91:160–181
Tracey DM (1971) Strain-hardening and interaction effects on the growth of voids in ductile fracture. Eng Fract Mech 3(3):301–315
Versino D, Bronkhorst C (2018) A computationally efficient ductile damage model accounting for nucleation and micro-inertia at high triaxialities. Comput Methods Appl Mech Eng 333:395–420
Wang ZP (1994) Growth of voids in porous ductile materials at high strain rate. J Appl Phys 76:1535–1542
Wang ZP (1997) Void-containing nonlinear materials subject to high-rate loading. J Appl Phys 81:7213–7227
Wu XY, Ramesh KT, Wright TW (2003) The dynamic growth of a single void in a viscoplastic material under transient hydrostatic loading. J Mech Phys Solids 51:1–26
Acknowledgements
The research conducted in this work has received funding from the European Union’s Horizon 2020 Programme (Excellent Science, Marie-Sklodowska-Curie Actions) under REA grant agreement 675602 (Project OUTCOME)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
Formulation of the macroscopic dynamic stress tensor
1.1 General formulation
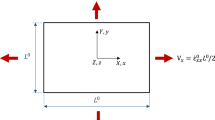
The macroscopic dynamic stress tensor \({\varvec{\varSigma }}^\text {dyn}\) is evaluated in this section with use of the following kinematic boundary condition:
with \({\varvec{x}}=x_1{\mathbf{e}_1}+x_2{\mathbf{e}_2}+x_3{\mathbf{e}_3}\) being the position vector.
\(\mathbf{L}\) is the macroscopic velocity gradient tensor, related to the macroscopic strain rate \(\mathbf{D}\) and spin tensor \({\varvec{\varOmega }}\) by the following relationships:
With the boundary condition (47), Eqs. (3) and (9) become:
with
More information can be found in Molinari and Mercier (2001).
The dynamic stress tensor \({\varvec{\varSigma }}^\text {dyn}\) is evaluated considering that the porous material is represented by the hollow cylinder and that the approximate velocity field is of the form:
where \(B=\frac{\text {tr}(\mathbf{D})}{2} \left( \frac{b}{r}\right) ^2-\frac{\mathbf{D}_{33}}{2}\) and \({\hat{\mathbf{L}}}\) is defined as in Eq. (21) replacing \(\mathbf{D}\) by \(\mathbf{L}\). The adopted velocity field satisfies the kinematic condition (47) together with the matrix incompressibility condition. From Eq. (52), the variation of the velocity \(\delta {\mathbf{v}}\) due to the change \(\delta \mathbf{L}\) of \(\varvec{\mathbf{L}}\) at the boundary and the acceleration are:
where \({\tilde{\mathbf{v}}}=v_1{\mathbf{e}_1}+v_2{\mathbf{e}_2}\). Combining Eqs. (52–54), the integral term \(I=\frac{1}{|V|}\int _V \rho \varvec{\gamma }\delta \mathbf{v}\) of Eq. (51) can be written as:
The volume |V| of the RVE is \(2l\pi b^2\). Note that particles are present only for \(a\le r\le b\). After some calculations leading to an explicit relation for \(I=\frac{1}{|V|}\int _V \rho \varvec{\gamma }\delta \mathbf{v}dV\), the use of Eq. (51) provides the components of the dynamic stress tensor. \({\varSigma }^\text {dyn}_{11}\), \({\varSigma }^\text {dyn}_{22}\) and \({\varSigma }^\text {dyn}_{33}\) are given by Eqs. (23–25) while the other components are expressed as:
where \({\mathbf{C}}=\hat{\mathbf{D}}\cdot \hat{\mathbf{D}}\) and \({\hat{\mathbf{C}}}\) is defined as in Eq. (21) replacing \(\mathbf{D}\) by \(\mathbf{C}\).
The dynamic stress tensor reveals particular aspects that are commented in the main text, see Sect. 3.1.
1.2 Case where \({\varvec{\varOmega }}=\mathbf{0}\)
The case where \(\mathbf{L}\) is symmetric corresponds to the velocity field (20) of Sect. 2.2. The dynamic stress tensor components \(\varSigma ^\text {dyn}_{11}\), \(\varSigma ^\text {dyn}_{22}\) and \(\varSigma ^\text {dyn}_{33}\) are still given by Eqs. (23), (24) and (25) respectively. Since \({\mathbf{C}}=\hat{\mathbf{D}}\cdot \hat{\mathbf{D}}\) in this case is symmetric, the other components are obtained directly from Eqs. (56–61), leading to Eqs. (26–30). As also stated in Sect. 2.1, the dynamic stress tensor is not symmetric even when spin effects are disregarded. For spherical voids, without spin contribution the dynamic stress tensor is symmetric, Molinari and Mercier (2001). The results are due to the geometrical configuration of the RVE which is not isotropic.
1.2.1 Axisymmetric case
For an axisymmetric configuration without shear contributions, the velocity field used by Tracey (1971) is of the form of Eq. (20) with \(\mathbf{D}\) expressed as:
From Eqs. (23–30), the only non zero components of \({\varvec{\varSigma }}^\text {dyn}\) are:
with
Note that the case of uniaxial extension considered in Molinari et al. (2015) for the dynamic coalescence of cylindrical unit cell is retrieved from Eqs. (63–65) by setting \(D_{11}=\dot{D}_{11}=0\).
In addition to the previous axisymmetric configuration, under plane strain conditions, \(D_{33}=0\), the following relationships are obtained:
Note that when \(D_{33}=0\) (i.e. the length of the cylinder remains constant, \(l=l_0\)), the porosity evolution is solely governed by \(D_{11}\) through \(\dot{f}=2(1-f) D_{11}\). Using in addition Eq. (66) and \(\dot{a}/a=D_{11}/f\) (matrix incompressibility), since the static stress is expressed in terms of \(D_{11}\) and f, it appears that under imposed in plane stress (i.e. \(\varSigma _{11}\) is known), the radial strain rate component \(D_{11}\) can be obtained. As a consequence, when \(D_{33}=0\), one can determine the porosity evolution from the stress components in the (\(\mathbf{e}_1, \mathbf{e}_2\)) plane. But, interestingly, inertia effects related to radial expansion are transferred also to \(\varSigma _{33}^\text {dyn}\). This implies that limiting the analysis to the 2D plane configuration may leave aside substantial information on the role played by micro-inertia. As a matter of fact, the axial stress needed to constrain the length of the cylinder in a dynamic problem cannot be captured by such 2D in plane approach.
Finite element modeling
To validate the proposed constitutive model, dynamic micromechanical computations have been carried out with the finite element code ABAQUS/Explicit. Various axisymmetric models have been developed to depict the dynamic response under (i) plane strain condition (ii) hydrostatic loading conditions and (iii) other loading cases considered in the paper. Since the matrix material is taken as rigid (elastically undeformable), a large value of the Young’s modulus has been adopted (6000 GPa) in all finite element calculations. In addition, to approach the incompressibility condition for the matrix, a value of 0.499 for the Poisson’s ratio has been used.
Recall that for all configurations addressed in the paper, the proposed analytical approach has been accurately compared to results obtained from numerical simulations. Here, only some examples have been selected to bring the comparison.
1.1 Plane strain configuration

Finite element cylindrical unit cell of length l, inner radius a and external radius b used for various loading cases. The mesh is made with 4 node axisymmetric elements (CAX4R) of element size of 20 \(\upmu \)m \(\times \) 40 \(\upmu \)m
For this case, the unit cell, illustrated on Fig. 15, is meshed with 4 nodes axisymmetric elements with reduced integration (CAX4R). The initial element size is about 20 \(\upmu \)m \(\times \) 40 \(\upmu \)m. Since the unit cell is expanded in the radial direction, elements are initially elongated in the axial direction, so as to prevent the element aspect ratio from excessive values during the deformation process. Kinematic conditions of the following form are considered:
which account for the condition of symmetry at \(\partial B_0\) and ensure the plane strain condition at \(\partial B_l\). In addition, the following stress boundary conditions prevail (expressed in the cylindrical coordinate system):
and
An example has been selected to illustrate the agreement between the analytical modeling and the numerical simulations. The case corresponds to the configuration of Sect. 4.1, Fig. 2a, with \(\dot{p}\) = 10 MPa/ns. For the reference material of Table 1, Fig. 16 shows that analytical results (solid line) coincide with Finite Element simulations (dots). In particular, the reduction of the axial stress \(\varSigma _{33}\) occurring at large deformation while the lateral stress is still increasing, is reproduced by both approaches, as observed in Fig. 16b. Note that \(\varSigma _{33}\) is evaluated from the ratio of the axial force on \(\partial B_l\) divided by the current area \(\pi b^2\).

FEM calculations and analytical result comparison for plane strain loading. Time evolution of a the porosity and b the axial stress. The stress rate is \(\dot{p}\) = 10 MPa/ns. The reference material with parameters listed in Table 1 is considered
1.2 Hydrostatic loading
There is no difficulty to prescribe \(\varSigma _{11}=\varSigma _{22}\) at the external boundary of the unit cell (\(r=b\)). Imposing \(\varSigma _{33}\) on the top surface (\(0\le r \le b\)) where a void is present for \(0\le r\le a\) is not straightforward. To overcome this difficulty, two strategies have been developed aiming at defining a model able to verify the proposed approach in case of hydrostatic loading. They give identical results and for completeness purpose, both will be presented in this appendix.
1.2.1 Boundary conditions inherited from the analytical model
The first approach relies on a two-step formalism. The solution of the considered configuration (prescribed hydrostatic loading condition) is searched by using the analytical approach presented in this paper. The resulting velocity field in the axial direction, denoted by \(v_3^{\text {th.}}\), is collected and used as a boundary condition in the finite element model of Fig. 15. Including the condition of symmetry, the set of kinematic boundary conditions is expressed as:
complemented with the stress boundary conditions expressed by Eqs. (69–70).
It has been shown that under intense imposed velocity \(v_3^{\text {th.}}\), the shape of the unit cell can strongly deviate from its cylindrical shape. As a consequence, a supplementary constraint turned out to be necessary to prevent the unit cell from unexpected shape change. Specifically, the nodes located at the inner and outer vertical boundaries of the cylindrical void (\(\partial B_a\) and \(\partial B_b\) in Fig. 15) are linked through a set of linear multi-point constraints so that, at each time of the deformation process, these surfaces remain vertical.

Closed cylindrical unit cell of length l, inner radius a and external radius b having a thin plate of thickness \(t_p\) on the top. CAX4R elements with initial size of 20 \(\upmu \)m \(\times \) 40 \(\upmu \)m are used
1.2.2 Closed unit-cell
The second approach consists of adopting a closed unit cell composed of a thin layer added at the top of the cylindrical void, see Fig. 17. If the top layer thickness, denoted by \(t_p\) in Fig. 17, is sufficiently small, and the additional domain is of negligible mass, it should not affect the overall response of the unit cell under dynamic loading. Thus, imposing the macroscopic stress tensor component at the top layer is immediate. This strategy however requires additional kinematic constraints in order to prevent the unit cell from excessive and unexpected distortion. Specifically, the inner surfaces identified by \(\partial B_a\) and \(\partial B_{t_p}\) on Fig. 17 as well as the outer surfaces \(\partial B_l\) and \(\partial B_{b}\) remain planar. In addition, the condition of symmetry (70) still prevails. The lateral stress \(\dot{p} t\) is prescribed according to Eq. (70), and the axial stress \(\varSigma _{33}=\dot{p} t\) is imposed at the top surface.
1.2.3 Validation on the reference case
The two strategies are compared against analytical results of Fig. 5 obtained for \(\dot{p}\) = 10 MPa/ns, \(l_0\) = 2000 \(\upmu \)m and other material parameters listed in Table 1. In our calculation, the thickness of the top layer was 10 \(\upmu \)m and it was confirmed that a lower value does not affect the response of the unit cell. Fig. 18 shows the evolution of the porosity versus time and serves at verifying the analytical approach. Fig. 18 also illustrates the equivalence between the two finite element models of Sects. B.2.1 and B.2.2.

Time evolution of the porosity for a porous medium with cylindrical void under the stress rate \(\dot{p}\) = 10 MPa/ns and considering the reference material with \(l_0\) = 2000 \(\upmu \)m and other parameters listed in Table 1. Comparison between analytical results and FEM calculations for spherical loading. The approach using the analytically inherited velocity field and the closed unit cell give comparable results
Rights and permissions
About this article

Cite this article
Subramani, M., Czarnota, C., Mercier, S. et al. Dynamic response of ductile materials containing cylindrical voids. Int J Fract 222, 197–218 (2020). https://doi.org/10.1007/s10704-020-00441-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10704-020-00441-7