
Abstract
Old-growth forests (OGF) provide valuable ecosystem services such as habitat provision, carbon sequestration or recreation maintaining biodiversity, carbon storage, or human well-being. Long-term human pressure caused OGFs in Europe to be rare and scattered. Their detailed extent and current status are largely unknown. This review aims to identify potential methods to map temperate old-growth forests (tOGF) by remote sensing (RS) technology, highlights the potentials and benefits, and identifies main knowledge gaps requesting further research. RS offers a wide range of data and methods to map forests and their properties, applicable from local to continental scale. We structured existing mapping approaches in three main groups. First, parameter-based approaches, which are based on forest parameters and usually applied on local to regional scale using detailed data, often from airborne laser scanning (ALS). Second, direct approaches, usually employing machine learning algorithms to generate information from RS data, with high potential for large-area mapping but so far lacking operational applications and related sound accuracy assessment. Finally, indirect approaches integrating various existing data sets to predict OGF existence. These approaches have also been used for large area mapping with a main drawback of missing physical evidence of the identified areas to really hold OGFs as compared to the likelihood of OGF existence. In conclusion, studies dealing with the mapping of OGF using remote sensing are quite limited, but there is a huge amount of knowledge from other forestry-related applications that is yet to be leveraged for OGF identification. We discuss two scenarios, where different data and approaches are suitable, recognizing that one single system cannot serve all potential needs. These may be hot spot identification, detailed area delineation, or status assessment. Further, we pledge for a combined method to overcome the identified limitations of the individual approaches.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
For a very long time, human activities have had a vast impact on the European forest landscape. Since the mid-Holocene, forests have been cleared for agriculture, grazed by domestic cattle, and intensively managed and altered for wood production [1, 2]. As a result, forests with little or no traces of human intervention—often referred to as “primary forests”—have become extremely rare. According to some studies [3, 4], the extent of primary forests in Europe covers approximately 1.4 million ha, or 0.13% of the total forest area.
The Food and Agriculture Organization has developed a global definition of the term “primary forest” published in 2020: “Primary forests are naturally regenerated forests of native tree species, where there are no clearly visible indications of human activities and ecological processes are not significantly disturbed” [5]. However, due to the scarcity of primary forests in Europe, a wider concept is needed to identify forests with a high degree of naturalness and conservation value. In this context, the concept of old-growth forests is gaining attention, also of policy makers [6].
This concept of old-growth forests (OGF) has been developed for the Pacific Northwest of the USA by Franklin [7] and Spies [8]. It has been implemented in the rest of North America in the 1990s [9, 10], and, since the early 2000s, it has started to appear also more and more in Europe [11,12,13,14,15,16,17,18,19,20,21,22]. A wide range of definitions and descriptions exist, but the common denominator is that it refers to forest ecosystems containing advanced structural stages of natural forest development such as the presence of more large old trees, higher structural complexity, and larger amounts of deadwood in advanced decay stage in comparison to communities of the same forest type.
According to the Convention on Biological Diversity (CBD), “Old growth forest stands are stands in primary or secondary forests that have developed the structures and species normally associated with old primary forest of that type have sufficiently accumulated to act as a forest ecosystem distinct from any younger age class” [23]. Old growth is thus not necessarily “virgin” or “primeval,” but can also re-develop following human disturbances [10]. These may have developed through deliberate or unintentional non-intervention over shorter or longer time. When applying the above definition of OGF, the total area may reach around 3% of the total forest area in Europe [24]. A definition and description for old-growth forests is currently under development for Europe, describing them as formerly managed forests that have redeveloped structural features that are typically associated with primary forests after a period of non-intervention.
Though rather small in extent and highly fragmented, primary and OGF habitats in Europe are essential for ecosystem conservation and they are highly valuable for Europe’s biodiversity [1, 4, 25]. Moreover, the forests internal microclimate characterized by a cooling effect and the forests potential to capture significant amounts of carbon dioxide make a valuable contribution to climate regulation [26,27,28,29] and may provide better ecosystem services than managed forests [30]. Although their values have been known for a long time and many areas have been largely protected, other areas were and are still under threat in different countries [31, 32]. Within the frame of the Biodiversity strategy to 2030, the European Union (EU) demands to put all remaining primary and old-growth forest of Europe under strict protection [6]. In order to enforce protective measures, the extent of primary and old-growth forests needs to be known and the status of the forests must be monitored to detect deterioration or monitor restoration progresses. This is also the aim of the EU-funded LIFE project PROGNOSES, which has a focus on ancient and primeval beech forests of the Carpathians and other regions of Europe. This study is a part of the project’s efforts to improve mapping and monitoring of such temperate OGFs in Europe.
Old-growth forests are not defined or identified by a single attribute [33], but a combination of several factors may serve as important indicators. This is even more critical, if forests from different ecosystems are considered (Mediterranean, temperate, boreal). To cope with the complexity, we focus our review on temperate OGFs (tOGFs) in Europe, nonetheless integrating studies from other areas, as long as they refer to characteristics that are relevant to or easily transferable to temperate European forests. In Sect. 4, we discuss some aspects on transferability, links, and limitations with regard to other OGFs. There is a wide variability and combination of features exhibited in OGFs, and the features do not simply “add-up” as the sum of a series of rigid criteria [34]. The extreme complexity of ecological processes that shapes natural forests’ dynamics [35], especially late-successional ones, demonstrated to converge to stand structural complexity [12], and more variably to biomass-related attributes. OGFs may therefore be described or delineated based on a set of multiple criteria that may or may not be simultaneously present. Furthermore, instead of applying strict dichotomous decisions on determining old growth, there is also a strong tendency to apply a gradual scale (index of “old-growthness” or OGI) to indicate the extent to which a forest meets specific criteria or approximates certain reference values [36,37,38]. Although there is no common definition of OGF, a review of literature on OGF criteria and indicators revealed strong commonalities between the studies. Table 1 summarizes the most commonly used OGF criteria, the related references, and also highlights, which remote sensing (RS) derived forest parameter(s) could be used to generate the respective OGF criterion. Although not all of the references cited in the table strictly relate to OGF, but could be used for OGF mapping due to similar or even the same criteria.
A review on OGF definitions [39] identifies three broad groups of criteria: (i) structural and compositional features, (ii) successional processes, and (ii) biogeochemical processes. Structural and compositional features comprise the existence of large old trees, numerous large logs and snags, diverse tree community, multi-layered canopy, structural complexity, and/or canopy gaps. Successional processes are related to external disturbances, either man-made (harvesting) or nature-made (wind-throw, forest fires, or climate change). Biogeochemical processes include decay stages, closed nutrient cycles, and increased understory vegetation. The authors of [40] defined six criteria to differentiate old-growth forests from other forests: (i) existence of large trees per species and site; (ii) wide variation in tree sizes and tree spacing; (iii) accumulations of large-size (in relation to the living trees) dead standing and fallen trees; (iv) decadence in the form of broken or deformed tops or bole and root decay; (v) multiple canopy layers; and (vi) canopy gaps and understory patchiness.
In their publication, the authors [41] identified (i) the absence of signs of human activity like artificial structures, stumps, cattle grazing alongside with (ii) a natural forest composition, (iii) presence of veteran trees, and (iv) standing and lying dead wood as the main criteria to differentiate primary forest from other forests. Again, there is the difference between primary forests and OGF, but a significant overlap in criteria used to distinguish either of them from other (NOGF, non-primary) forests. In a global meta-study [12], the most important criteria to differentiate old-growth forests from other forests were identified separately for all continents. For Europe, (i) age of the trees, (ii) presence of large and very large trees, and (iii) the amount of coarse woody debris (CWD) were identified as the most decisive parameters. Other authors [42] also found the most significant differences between managed and old-growth forests in (i) the presence of large trees (mean diameter), (ii) presence of CWD, and (iii) volume of living trees (similar to biomass). The authors of [37] defined (i) the successional status, (ii) development stage, (iii) tree species diversity, (iv) proportion of native species, (v) variability of tree dimensions and density, (vi) density of regeneration layer, (vii) amount of dead wood, (viii) decay stage, and (ix) the existence of microhabitats as important criteria in the definition of OGF. Several studies reported on the strict dependence of living and dead biomass attributes on site conditions, and established minimum or range values for biomass attributes within the same bioclimatic zone, and found that maximum tree age and stand structural complexity converged to naturalness-related ecological processes [12, 16]. A summary of the identified OGF criteria is given in Table 1.
For proper mapping and monitoring of forests, traditional terrestrial assessments have been performed using sample plots. Such plots are usually a circle or a square with 0.03–0.15 ha of size. Manual in situ methods are used to map and monitor forest properties at these plots, which is often difficult and time consuming [43]. In addition, a comparison of existing in situ survey methods for forest biodiversity assessment highlighted that no common methodology is used in Europe [44]. This applies even more to old-growth forests due to often remote and not easily accessible locations of these forests, which is in many cases the reason for their very existence. Alternative approaches using remote sensing (RS) and geo-information technology may help in this endeavor [45]. Already in 2012, a study [46] stated that Earth Observation (EO) has a role to play in monitoring biodiversity in general. Further, another source [24] stated that “while the identification of undocumented primary and old-growth forests in the field remains crucial, inventorying and monitoring applications might benefit from using state-of-art remote sensing technology.” However, already in 1998, Norheim [47] found strong differences in OGF extent depending on RS data and methods used. Most authors [3, 48, 49] agree that remote sensing–based classification or indirect habitat modeling with geo-information technology is means to identify “potential” old-growth forests, which can consecutively be evaluated in more detail by targeted field surveys.
The initial premise for this review was the structuring of OGF mapping approaches from a RS point of view in three groups: the parameter-based approaches, the indirect approaches, and the direct approaches. They are schematically outlined in Fig. 1. First, parameter-based approaches are based on (several) individual forest parameters as listed in Table 1. Studies either use individual forest parameters derived from RS data within the study itself or from existing forest-related data (such as national forest inventories or biomass assessments). Second, indirect approaches employ existing thematic geospatial data as proxies to model the potential existence or absence of OGF. Such proxy data are for example: roads, settlements, specific land use categories, socio-economic indicators such as population density, and climate data. They sometimes also use occurrence or absence of specific indicator biota like insects or fungi. Third, the direct approaches use RS data to directly classify OGF without any intermediate step. This third group has gained increased interest with the development of more efficient machine learning methods in recent years. In addition to these three groups, also several combinations of the three approaches are possible. In the following subchapters, we review the data and methods used for each of the three approaches.

Schematic illustration of the three main approaches to map OGF based on remote sensing and other geospatial data
Based on this premise, the aim of this study was to analyze and review each approach regarding previously used RS data and methods. This is to provide a comprehensive picture on common agreements, the status of research (i.e., what is already well known), and the main knowledge gaps in the identification and mapping of OGF. Further, we highlight the main conceptual differences between the three approaches. Finally, we give an outlook to the next steps and future trends in OGF mapping and monitoring.
2 Methodology
The review methodology used in this study is twofold: first (Sect. 2.1), existing publications are reviewed to compile the state-of-the-art for the three approaches. The search was following the PRISMA approach [50] performed in two stages: first, we searched in journals with “remote sensing” in the title for all publications including the term “old-growth forest” (and similar terms, see Fig. 2) in the Elsevier SCOPUS database. This search was followed by a screening and eligibility check eliminating records with a focus on non-temporal OGFs and studies merely taking place on an OGF site but not targeting the differentiation of OGF/NOGF. In addition to this structured search, we also included studies based on the knowledge of the authors and their networks. Due to the common project (LIFE project PROGNOSES) dealing with the mapping of old-growth beech forests in Europe, there is a clear focus/bias in this part of the literature selection. Finally, in a qualitative survey, we first sorted the resulting OGF records into the three approaches. Second, we grouped the parameter-based approaches according to RS input data type. For each of the approaches, examples are shown in the respective results sections.

Literature review for mapping approaches (2.1) following the PRISMA guidelines
The second part of the review (Sect. 2.2) is a quantitative assessment of classification methods used within all three approaches. These classification methods are of cross-cutting nature, as a specific classification method, e.g., Random Forest, can be used either to classify a specific parameter within the parameter-based approach or to classify OGF directly. For this assessment, a separate literature search was performed, as this part of the search is not restricted to the classification of OGF. More details on that methodology are given in Sect. 2.2.
2.1 Review of Mapping Approaches
Concerning the parameter-based approach, the first step was to relate the OGF criteria identified in the introduction to forest parameters that can be generated from RS data, see Table 1 for the result. Next, an extensive search was conducted for publications targeting these forest parameters. It has to be mentioned that many of these forest parameters are used for other applications than OGF classification; thus, the publications reviewed do not necessarily have a focus on tOGF. This is also represented in the number of studies given in Fig. 2: 171 parameter-based records without tOGF focus compared to 31 parameter-based records with tOGF focus. The second step sorted identified publications per forest parameter by input RS data type to get an overview on which parameters can be gathered from which data sources. The data types reviewed in this publication are: Airborne Laser Scanning (ALS), optical very high-resolution (VHR) data, optical high-resolution (HR) data, and Synthetic Aperture Radar (SAR) data. Each type is briefly explained below.
ALS is an active remote sensing technology able to provide 3D characteristics because it penetrates the forest canopy and, therefore, delivers information on forest vertical structure, with point densities typically between 1 and 100 points/m2. Accordingly, the level of accuracy and the capability to map a certain forest parameter vary with the point density. The emitted laser pulses can either be recorded as discrete returns (single or multiple return system) or as one continuous return (full-waveform system) [51]. Generally, wall-to-wall mapping is possible, but usually rather costly in terms of acquisition as well as processing time and computational capacity.
For this study, all optical imagery with a pixel size smaller or equal to 5 m is considered to be VHR data. Usually, these are orthophotos from aerial surveys or from VHR satellite data (e.g., Pleiades, World View) and contain four bands (visible and near infrared). Wall-to-wall assessment is possible and the acquisition costs depend on the sensor used. Several VHR sensors also allow stereo-processing, which can be used to deduce 3D information of the canopy [52,53,54,55]. However, in contrast to ALS, there is no penetration of the crown and thus no information below the upper canopy.
Optical HR data has a spatial resolution between 5 and 30 m. The most frequently used imagery is from the European Space Agency’s Sentinel-2 and NASA’s Landsat mission since they are available free of charge. They have multispectral bands ranging from visible and near to shortwave infrared, allow for wall-to-wall assessment, and have a high repeat rate (frequent images) which enables to incorporate temporal characteristics of spectral reflection in the analysis. The high repeat rates result in dense image time series which enable time series analyses that also take into account the change in spectral reflectance. Moreover, the Landsat mission has been providing continuous Earth observation data since 1972 which allows historical analysis for the last five decades [56].
Finally, SAR is an active sensing system of different wavelengths (X, L, C, S, P with X being the shortest and P being the longest wavelength). Longer wavelengths can penetrate the vegetation and give information on the forest structure and biomass. Wall-to-wall assessment is possible and repeat rate is similar to HR data. The costs depend on band and sensor; there are no acquisition costs for C band Sentinel-1 data.
Aside from the parameter-based approach, we also used all available sources to generate a comprehensive review of existing studies for direct and indirect approaches to map OGF in temperate forests of Europe. In full awareness that this review does not cover all studies ever done in this field, we are however confident to show the broad picture.
2.2 Quantitative Assessment of Classification Methods
For the second part of the review, we searched the SCOPUS database in Journals with “remote sensing” in the journal title and “forest” or “tree” in the title, abstract, or keywords (search string: SRCTITLE ( “remote sensing”) AND TITLE-ABS-KEY ( “forest” OR “tree”)). This led to 1242 publications. Instead of dealing with each publication individually, we categorized the methods into algorithm groups. The following eleven algorithms/algorithm groups were identified:
-
1.
Thresholding, local maximum or local minimum approaches
-
2.
Regions growing and watershed approaches
-
3.
Spectral mixture analysis
-
4.
Template matching
-
5.
(Multiple) linear and non-linear regression
-
6.
Bayesian approaches
-
7.
Support Vector Machine (SVM)
-
8.
Clustering algorithms
-
9.
Dimensionality reduction algorithms
-
10.
Random forest (RF) and ensemble learning approaches
-
11.
Artificial neural (ANN) network and deep learning (DL) approaches
Exemplarily, the search string for the first category would be: SRCTITLE ( “remote sensing”) AND TITLE-ABS-KEY ( (“forest” OR “tree”) AND (“thresholding” OR “local maximum” OR “local minimum”)). In order to see the temporal development of the different algorithms, we sorted the publications by publication date into 5-year intervals starting from 1997 until the end of 2021.
3 Results
The results of the first review are given in Sects. 3.1, 3.2, and 3.3 per approach. Section 3.4 summarizes the results of the methods review.
3.1 Parameter-Based Approach
For the parameter-based approach, the first step is to link OGF criteria to remote sensing–based parameters. Table 1 reviews the literature regarding this connection. Each potential OGF criterion is shown in the first column, the respective identified RS parameters in the last. Details and references for the OGF criteria are given in the middle.
The second part reviews the RS data types which can be used to map the above-mentioned forest parameters. The type of input remote sensing data is of high relevance, since it determines not only the achievable forest parameters and extent of study area, but also relates to costs and accuracies.
The result of the conducted literature analysis (202 records) is a matrix (Table 2) with the columns representing different input remote sensing data types and the rows representing the target forest parameters. The aim of this matrix is to provide an overview of the data types that have been used to map the target forest parameters. Thus, also not OGF-related studies are included as long as they aim to generate the same forest parameters. Although this matrix will never be complete, we are confident that the main studies are captured and that knowledge gaps are correctly depicted. This matrix is also meant to serve as a quick reference work to allow scientists to easily find the relevant study they may be interested in. Gray color marks those cells in the matrix, where a derivation of the respective forest parameter from this data type is not (yet) possible due to physical restrictions, e.g., deriving individual tree crowns from optical HR data. All papers, which specifically aim at mapping forest parameters to distinguish OGF from NOGF, are printed bold. If authors combined different data sets to generate a single forest parameter, they are mentioned in the same row repeatedly in different columns, as for example [65]. Similarly, if authors used the same data set to derive multiple forest parameters, they are mentioned in the same column repeatedly.
Depending on the data used and forest parameter to be mapped, assessment on two different levels can be conducted (mentioned in brackets in Table 2): individual tree detection (ITD) or area-based assessments (ABA). The area to be looked at can be a forest stand, a moving window, or a raster. ITD assessment relies on detailed input data such as ALS [66] or optical VHR data [67]. ABA and ITD can also be combined, as shown in Fig. 3. Many forest parameters are generated per stand (e.g., canopy cover), while single tree detection based on ALS data is also included as stem numbers per ha. A comprehensive review of methods for individual tree assessments with a focus on LiDAR data, but also including studies based on optical and SAR data, was published in 2016 [68]. Similarly, an international comparison of tree detection approaches based on optical and LiDAR data was performed in the early 2010ers [69].

Generation of several forest parameters from ALS and Sentinel-2 satellite data, wall-to-wall mapping, one segment shown as example
There are also several research activities using point-wise data, i.e., terrestrial laser scanning (TLS) or, more recently, space-borne laser scanning (SLS) to map forest parameters, with some of them specifically related to OGF [70,71,72,73,74]. However, for brevity reasons, we will not go into further detail on TLS and SLS in this paper. For more information on forest parameter retrieving with TLS, the reader is referred to a related review article [75].
For the identification of individual trees (tree position, tree height, and/or tree crown), two broad categories of methods can be distinguished: raster-based methods and point cloud–based methods. Raster-based methods use one or more images with an arbitrary number of bands as input. The information the pixel values represent can either be optical [101, 103, 104] or SAR backscatter information [76, 101], or they represent height (e.g., mean, maximum, dominant height at pixel area) or pulse intensities derived from 3D point clouds that are projected into 2D [69, 81, 270, 271]. Assessment approaches based on point clouds, e.g., 3D data, derived from LiDAR, photogrammetric/radargrammetric processing, or from interferometric SAR [109], are targeting at the 3-dimensional shape of certain features, e.g., cone- or dome-shaped features representing tree crowns or cylinders assumed to represent tree stems[81, 99]. The majority of all studies using height information (either raster based or point cloud based) to delineate tree crowns or tree objects used clustering [82, 85, 87, 91, 111, 272] or region growing algorithms [69, 76, 80, 81, 84, 87, 89, 95, 103, 104]. More recently, deep learning has also been used for this purpose [99, 102]. For area-based height assessments (stand height and height distribution), regression-based methods are predominantly used [116, 122, 123, 125, 128,129,130,131, 138, 211], but also RF [122, 124, 138, 140], SVM [138, 140], or ANN [240] is applied.
Methods to assess canopy cover are manifold and range from thresholding of height metrics [117, 168] and regression algorithms [116, 167, 178, 181] to regression and decision trees and various other well-established machine learning algorithms such as Gradient Boost, SVM, or ANN [169, 171, 173, 179, 180, 182, 240]. It has been successfully demonstrated that object-based approaches applying a comprehensive, empirically defined set of rules based on spectral and/textural image characteristics are particularly suitable when optical VHR imagery is available [170, 172, 176]. Canopy gaps are mostly detected by applying empirically defined thresholds for height metrics or spectral values [170, 185, 187, 191, 192, 196, 200, 201], but also RF and SVM as well as spectral mixture analysis have been used [198, 204]. Instead of providing absolute information, e.g., gap or no gap, some studies provide canopy cover percentages or gap probabilities for a certain analysis unit which can be a single image pixel or an analysis grid of certain extent [184, 186, 199]. In some way related to canopy cover is the assessment of the history of forest cover using RS data. Several papers returned from the SCOPUS search dealt with this assessment in Asia [181, 273, 274].
To classify tree species based on RS data (either ITD or ABA), RF and SVM algorithms are the classifier of choice in many studies [49, 211, 249, 252, 256, 263,264,265, 268, 269, 275,276,277]. In addition, the linear discriminant analysis method [87, 246], regression [149], and, more recently, also deep learning algorithms have been employed to map tree species [90, 260].
Various studies dealing with the differentiation between dead and living trees use regression-based methods [85, 149, 150, 152, 153, 159, 159, 161], but also SVM [106], RF [158], or deep learning [156] has been used for this purpose. In addition, for the detection of lying deadwood also template matching algorithms were employed [164].
For the determination of the vertical structure of a forest, e.g., number of tree layers, mostly height information acquired by ALS is used because laser pulses can penetrate the canopy. Depending on the wavelengths, this is also true for some SAR sensors. The used methods range from straightforward thresholding operations [115, 228, 231], regression models [227], clustering algorithms [82] to newer ensemble learning and instance-based algorithms such as RF or SVM [230], and deep learning [229]. More recently, attempts have been made to investigate the use of optical data and the combination of optical and SAR data in a classification approach building on neural networks to derive forest vertical structure [226, 237, 238]. Figure 3 shows an example of several forest parameters being mapped for the same area; the input data sets are ALS and Sentinel-2 optical HR images.
3.2 Indirect Approach
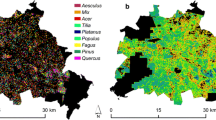
Instead of mapping the physical existence of OGF, the indirect approach aims at identifying areas of possible existence of OGF. This information can be a valuable element in OGF mapping. All indirect approaches are based on other existing (geospatial) data sets, sometimes combined with other data sets, such as questionnaires and literature review [4]. This study compiled a database of primary forests of Europe (including OGF) by using a boosted regression tree algorithm to model the current distribution of primary forests using different biophysical, socio-economic, and forest-related predictor variables. Based on the calculated model, a comprehensive 1 km × 1 km resolution map representing the likelihood of the occurrence of primary forest in Europe was produced. Figure 4 (left) shows the final map of the likelihood of the occurrence of primary forests in the Carpathians.

The result of two mapping exercises using indirect approaches to map likelihood of primary forest in the Carpathians. Left: Map of highest likelihood of primary forest occurrence in Europe based on [4] with data from [283]. Right: Presence of High Conservation Value Forests in Romania from [280]. Green indicates prime HCVF, light blue indicates managed forests, and purple indicates forests with restoration potential towards HCVF
On global scale, the authors of [278] mapped forest management by downscaling of existing data from national and subnational forest management of 2000 collected in the Forest Resource Assessment of the Food and Agricultural Organization of the United Nations and enhanced by subnational statistics for some countries. The classification was performed on two levels, each having three categories. Level 1 (forest classes) includes primary, naturally regrown and planted forest, while Level 2 distinguishes between forest uses. The authors calculated a multinomial logit fit model using a set of 21 predictor variables representing the categories accessibility, governance, soil, climate and terrain conditions, and forest properties to generate global likelihood maps of 1 km × 1 km spatial resolution. The predictor variables are based on the PREDICTS database (Projecting Responses of Ecological Diversity in Changing Terrestrial Ecosystems [279]).
The Romanian Carpathians were in the focus of an approach to map high conservation value forest (HCVF), which includes OGF [280]. The work of this study is based on three different data sources: forest loss data from Romania from 1955 to 1965 derived from historical Corona spy satellite data [281], digitized historical military topographic maps between 1968 and 1978, and maps of forest disturbance regimes across Europe from 1986 until 2016 derived from Landsat satellite image data [282]. The third data set was further used to assess the canopy’s structural complexity based on different spectral-temporal metrics from Landsat and ALOS-2 PALSAR-2 imagery. Additionally, they evaluated anthropogenic pressure by calculating a human pressure index based on additional data on transportation network, population density, and local reliance on firewood. Combining the structural complexity and anthropogenic pressure, they generated a comprehensive forest map of the Romanian Carpathians with four classes (primary HCVF, HCVF at risk, managed forest, and restoration forest). Figure 3 (right) shows the result of their modeling.
As a summary, Table 3 lists all predictor variables used in the three reviewed studies. There are 5 predictor variables that were used in all of them (highlighted in bold in the table): tree cover or forest maps, topographic information on elevation and slope, population density, and travel time to the nearest city.
3.3 Direct Approach
In accordance with the geographic origin of the term “old-growth forest” laid out in the introduction, the first studies employing direct assessment approaches of OGF by means of remote sensing data focus on temperate coniferous forests of the western US [234, 284, 285]. Although not directly in the focus of our review due to a different geographic area, we briefly review some main US studies below. To differentiate between young forests, mature forests, and OGF within a coniferous forest stand, the authors of [234] employed Landsat 5 and regression analysis and obtained 75% accuracy for the OGF class. By making use of Landsat 7 Enhanced Thematic Mapper imagery and an unsupervised classification approach, the authors of [285] successfully classified old and mature coniferous forest in eight different ecoregions in the Pacific Northwest, USA. The achieved overall classification accuracies vary between 89 and 94% for the different ecoregion.
Also set in the USA, the authors of [286] used ALS data to map forest successional stages across a structurally diverse, mixed-species forest in Northern Idaho. They calculated different ALS metrics describing the forest height and canopy cover. The RF algorithm was used to model six different classes of successional stages with an overall accuracy of about 95%. In their study which was also based on ALS data, the authors of [287] tested whether young secondary forests have distinct canopy structural characteristics compared to primary forest and if forests located in higher altitude have a lower complex structure than forests in lower altitudes. Their results were not significantly indicating that structural complexity is linearly related to forest age or elevation range. Instead, they found that structure varies within and among forest age groups, leading to the conclusion that forest development is not sequential but can follow multiple pathways.
Coming back to Europe, a more recent study [288] produced a map of potential primary forest in the Romanian Carpathians. The authors employed optical Sentinel-2 data and developed an object-based classification approach. Forest segments are generated using the Sentinel-2 data and refined by manual revision. Based on existing field measurements, they developed a classification approach based on empirical thresholds for the leaf area index (LAI) and the LAI (leaf water content) to distinguish young forest stands from primary and OGF. Based on the results produced by [288] and further existing and verified OGF inventories in combination with additional information gathered during field surveys and other mapping projects, OGF in Romania was mapped by visual assessment of historic and current VHR data [48]. They used historical CORONA satellite images as well as aerial and VHR satellite image time series provided by Google Earth and other optical data providers to identify potential further OGF areas not yet included in existing inventories. The results of this mapping exercise are depicted in Fig. 5.

Map of primary forests in Romania from [48]
By employing a machine learning algorithm, the authors of [49] mapped OGF directly developing an object-based approach using mean and standard deviation values of optical Sentinel-2 10 and 20 m bands as well as six vegetation indices and Grey Level Co-occurrence Matrix textural features. Existing OGF reference plots provided by WWF Ukraine and additionally acquired NOGF plots served as segments for the object-based classification. By using a random forest classifier, the authors identified OGF with an overall accuracy of about 85%.
Table 4 provides a summary of the data, metrics, and algorithms used in reviewed publications. In studies using optical satellite imagery, either from Landsat or Sentinel-2 sensors, spectral band and the Normalized Difference Vegetation Index (NDVI) are used. Landsat based studies also employed the Tasseled Cap (TC) Brightness (TCB), Greenness (TCG), and Wetness (TCW).
3.4 Results of Classification Methods Review
This part of the review is to assess which classification methods have been used previously and how this has developed over the past 25 years. Table 5 shows the number of publications in Elsevier’s SCOPUS database over time. Visualized in Fig. 6, it can clearly be seen that the use of random forest or (other) ensemble learning approaches has increased significantly in the past 10 years. Artificial neural networks and deep learning have become widely used only in the last five years.

Number of publications per period using the identified methods/method groups
4 Discussion
With the new EU Biodiversity strategy to 2030 calling to protect remaining primary and old-growth forests in Europe, the scientific community has also increased efforts on identifying and monitoring of primary and OGFs. One remaining challenge lies in the absence of a common definition and related criteria and thresholds, which are now being worked on at a European level. Nonetheless, there are certain criteria indicating OGF which can be related to forest parameters that, in turn, can be derived by means of remote sensing. Since remote sensing technology has proven to be of valuable support for forestry applications, such as forest inventories, it offers a unique opportunity to support mapping and monitoring of OGFs.
This study provides a review on existing literature with a set of certain limitations. These limitations may present a notable bias in the subject matter covered and therefore need to be addressed to provide the readership with the clear picture to put the results of this review in perspective. First, since the systematic search did not return the expected number of studies, pre-existing knowledge of the authors has been included. Therefore, also the results are to a large extent based on pre-existing knowledge of the authors. Second, due to the focus on European temperate OGF, the review is based mainly on European literature, with a low coverage of articles dealing with tOGFs elsewhere. Third, articles dealing with “old-growth” forests but qualified with other terms (e.g., “primeval,” “primary,” “overmature”) have not been considered. Fourth, journals of forest ecology and management were not considered if the articles were not previously known by the authors, as the search was limited to journals with “remote sensing” in the title.
Three approaches has been identified in this review: the parameter-based, the indirect, and the direct approach. From the review, we see that the direct approach has been developed and mostly been used in North America and only recently was applied in the Carpathians in Europe [48, 49, 287]. One reason might be the availability of higher resolution data, which is more important for small-structured forest patches in Europe as compared to larger and more homogeneous areas in the USA and Canada. Another reason for the higher popularity of the parameter-based approach in Europe might also be the availability of data and information for other purposes (forest monitoring, management, habitat mapping), that could easily be re-used for OGF mapping.
There is a big potential to apply direct approaches more widely in Europe, as examples from the Carpathians already show. Certainly, adaptations might be needed, especially, if the approaches should be applied to other ecoregions like the Mediterranean or the boreal forest zones of Europe. This is however even more true for the transfer of parameter-based approaches.
Finally, indirect approaches are not easily transferable from one region to another, as existing frame conditions, available data, and OGF definitions strongly differ. Especially the distance to roads or settlements is not as important in Europe as it might be on other areas, e.g., if an OGF is under protection. There are several tOGF assigned as UNESCO Natural World Heritage, which are very close to or even surrounded by settlements and streets. Thus, the indirect approach has clear limitations for applicability in Europe and should rather be used in combination with other approaches or with regionally adapted thresholds (see scenario 1).
A broad spectrum of methods and approaches have already been developed to identify and map OGF, often on specific case studies. This makes it impossible to compare achieved accuracies due to different procedures of accuracy assessment, including sampling design and accuracy measures calculated, reference data, and site conditions. In order to allow for a thorough comparison of methods and achievable results, we urge for a systematic international comparison of methods for OGF classification on a homogenized data set and a common evaluation approach (similar to the comparison of tree detection algorithms from [69]). A further complication resides in the multi-parameter nature of OGF classification. While one forest parameter might be very accurately mapped, this does not necessarily result in accurate OGF mapping. It may well be that moderate accuracies for several forest parameters may be more important for correct OGF classification due to the trade-off and complementarity between parameters. Keeping this and also the costs of different data sets in mind, there is not one solution for all. As a result, it is impossible to draw any general conclusions which of the three approaches (parameter-based, indirect or direct) is to be preferred.
Based on this literature study, therefore, we propose two scale-dependent optimal scenarios to be tested in practice.
-
(a)
Scenario 1: Regional to continental-wide evaluation of tOGF
The aim of this scenario is to identify so far unknown tOGF stands on a broader geographical scale, e.g., regional, country-wide, or continental-wide. Generally, the larger the assessment area, the more important it is to use highly automated assessment approaches based on freely available RS data and existing reference data. Therefore, direct approaches using free and open RS data, like the Copernicus optical and SAR data sets, in combination with other meaningful geospatial data sets in an automatic machine learning procedure seem to be the most suitable and efficient approach, which has been shown in examples mainly from North America. The main obstacle of a scenario using the direct approach is the availability of sufficient, reliable, representative, and consistent reference data covering all types of OGF occurring in the area of investigation. In ideal circumstances, enough reference data is available to perform training of the selected algorithm and validation of results with an independent data set. However, since the number of conducted studies using direct approaches based on up-to-date machine learning methods is rather small (see Sect. 3.3), future research is crucial to exploit the full mapping potential. The second option for such an assessment would be an indirect approach using a wide variety of existing geospatial data to “predict” the presence of potential tOGFs with mathematical models, as done for example in [280] or in [4] with the related aim to detect “potential” primary and tOGF in Europe. Ideally, both the direct and the indirect approach should be jointly applied in a combinatory method. The fact that there is not one single, binary denominator of tOGF might also be a major challenge in applying one approach on continental scale. Therefore, it will probably be necessary to geographically split the mapping area in contained strata in order to account for different dominant criteria and threshold values, often related to growth conditions and forest composition.
-
(b)
Scenario 2: Detailed mapping for quantifiable monitoring and/or decision support
The general assumption for this scenario is that detailed ground-truth data is already available, quantifying specific old-growth indicators for (potential) tOGF stands and their surroundings. In this case, a parameter-based approach using ALS data in combination with additional satellite or airborne data would be most suitable. The applications for this more local scenario can be twofold. A first application is the more detailed delineation of the borders of known tOGF areas and the characteristics of their surroundings. This mapping can provide valuable information and recommendations for policy makers for the definition of new or expanding of existing protection zones or it may serve as a basis for setting up an in situ field assessment network. The second application is the monitoring of known tOGFs over time in order to assess their conservation and quality. A parameter-based approach can objectively assess the different RS forest parameters listed in Table 1 to support the assessment of the respective tOGF criteria. However, since ALS data and/or very high-resolution optical data is needed to provide detailed information on local scale, developing and maintaining such a monitoring system are always associated with additional costs for acquisition of RS data.
5 Summary and Knowledge Gaps
In conclusion, the number of publications dealing with tOGF mapping as main focus found in this study is rather limited. However, there is a lot of knowledge from other forestry-related applications that map forest parameters using RS currently underexploited for its use to assess OGF. This is a chance to leverage the full potential of remote sensing technology independent of the primary application focus. In terms of methods, we identified three groups: parameter-based approaches, direct approaches, and indirect approaches. The first type of approach is mostly suitable for local assessments with a clear focus on ALS data, due to its ability to penetrate the canopy and deliver information on the vertical and horizontal structure of the forest. A second reason is the high resolution, which allows to detect individual trees and gather their specific properties such as size and position. In combination with optical data to derive tree species information, this data currently returns highest accuracy values and largest level of detail. However, using ALS data and optical VHR data is usually rather cost-intensive. Therefore, its use for large-area assessment, e.g., country and continental-wide, is usually not feasible. For such large-area assessments, both the direct and indirect approaches have been used, typically employing HR optical and SAR data as well as other geospatial data sets. The applied algorithms to map different forest parameters or OGF directly range from regression algorithms to region growing, ensemble learning (especially RF), SVM, and newer ANN and deep learning architectures with a clear recent focus on RF, SVM, and ANN including deep learning algorithms.
We could identify five main knowledge and research gaps. The first issue is the absence of commonly accepted definitions, indicators, and threshold values to define and assess OGF, even when restricted to temperate forests (tOGF). Both, an acknowledged definition for OGF itself and also for indicators of “old-growth-ness,” are lacking. A second challenge relates to one specifically important OGF criterion, dead wood amounts. Data on dead wood are often lacking from traditional forest inventories and RS assessments of forest stands in Europe. In the parameter-based approach, the most important need is to develop more accurate and more efficient dead wood assessment methods. Third, for the direct approach, large comparative studies on accuracy assessments are needed. Fourth, a combination of direct and indirect approaches should be tested, as it could provide important data combinations that can improve the accuracy of assessments, as it may reduce the errors of the individual methods. And fifth and finally, the absence of reference values for primary temperate forests in Europe are lacking. Such reference values are essential to assess the level of old-growth-ness of a forest. This is not only problematic for dendrometric parameters, but also for species composition, where we are to rely on hypothetical extrapolation of natural forest types and their species composition.
Nevertheless, the increasing spatial and temporal resolution of area-wide RS data, especially from satellite data across large areas, provides a large potential for forest classifications and assessments, that no longer should rely on statistical data from ground-based sample grids (like NFIs). The further development of RS methodology in forest classification and its application will be beneficial not only for the mapping of OGF, but also as inputs for national restoration plans and to monitor the spatial trends in the degradation or restoration status [289] of forest ecosystems in Europe and elsewhere.
Availability of Data and Material
Data sharing not applicable to this article as no data sets were generated or analyzed during the current study.
References
da Silva, L. P., Heleno, R. H., Costa, J. M., Valente, M., Mata, V. A., Gonçalves, S. C., da Silva, A. A., Alves, J., & Ramos, J. A. (2019). Natural woodlands hold more diverse, abundant, and unique biota than novel anthropogenic forests: A multi-group assessment. European Journal of Forest Research, 138, 461–472. https://doi.org/10.1007/s10342-019-01183-5
Kaplan, J. O., Krumhardt, K. M., & Zimmermann, N. (2009). The prehistoric and preindustrial deforestation of Europe. Quaternary Science Reviews, 28, 3016–3034. https://doi.org/10.1016/j.quascirev.2009.09.028
Sabatini, F. M., Bluhm, H., Kun, Z., Aksenov, D., Atauri, J. A., Buchwald, E., Burrascano, S., Cateau, E., Diku, A., Duarte, I. M., et al. (2020) European Primary Forest Database (EPFD) v2.0. bioRxiv. https://doi.org/10.1101/2020.10.30.362434
Sabatini, F. M., Burrascano, S., Keeton, W. S., Levers, C., Lindner, M., Pötzschner, F., Verkerk, P. J., Bauhus, J., Buchwald, E., Chaskovsky, O., et al. (2018). Where are Europe’s last primary forests? Diversity and Distributions, 24, 1426–1439. https://doi.org/10.1111/ddi.12778
The State of the World’s Forests. (2020). FAO and UNEP, 2020; ISBN 978-92–5-132419-6.
European Commission. (2021). Directorate general for environment. EU Biodiversity Strategy for 2030: Bringing Nature Back into Our Lives.; Publications Office: LU.
Franklin, J. F. (1981). Ecological characteristics of old-growth Douglas-fir forests; 118; US Department of Agriculture, Forest Service, Pacific Northwest Forest and Range Experiment Station.
Spies, T. A. (2004). Ecological concepts and diversity of old-growth forests. Journal of Forestry, 102, 14–20. https://doi.org/10.1093/jof/102.3.14
Frelich, L. E., & Reich, P. B. (2003). Perspectives on development of definitions and values related to old-growth forests. Environmental Reviews, 11, S9–S22. https://doi.org/10.1139/a03-011
Wirth, C., Gleixner, G., Heimann, M. (2009). Old-growth forests: Function, fate and value – An overview. In Old-Growth Forests; Springer Berlin Heidelberg, pp. 3–10.
Bauhus, J., Puettmann, K., & Messier, C. (2009). Silviculture for old-growth attributes. Forest Ecology and Management, 258, 525–537. https://doi.org/10.1016/j.foreco.2009.01.053
Burrascano, S., Keeton, W. S., Sabatini, F. M., & Blasi, C. (2013). Commonality and variability in the structural attributes of moist temperate old-growth forests: A global review. Forest Ecology and Management, 291, 458–479. https://doi.org/10.1016/j.foreco.2012.11.020
Di Filippo, A., Biondi, F., Piovesan, G., & Ziaco, E. (2017). Tree ring-based metrics for assessing old-growth forest naturalness. Journal of Applied Ecology, 54, 737–749.
Gilg, O. (2005). Old-growth forests. Characteristics, conservation and monitoring. Retrieved date 12 May 2023. https://www.reserves-naturelles.org/sites/default/files/librairie/cahier74bis.pdf
Lingua, E., Garbarino, M., Mondino, E. B., & Motta, R. (2011). Natural disturbance dynamics in an old-growth forest: From tree to landscape. Procedia Environmental Sciences, 7, 365–370.
Vandekerkhove, K., Vanhellemont, M., Vrška, T., Meyer, P., Tabaku, V., Thomaes, A., Leyman, A., De Keersmaeker, L., & Verheyen, K. (2018). Very large trees in a lowland old-growth beech (Fagus Sylvatica L.) forest: Density, size, growth and spatial patterns in comparison to reference sites in Europe. Forest Ecology and Management, 417, 1–17. https://doi.org/10.1016/j.foreco.2018.02.033
Ziaco, E., Di Filippo, A., Alessandrini, A., Baliva, M., D’andrea, E., & Piovesan, G. (2012). Old-growth attributes in a network of Apennines (Italy) beech forests: Disentangling the role of past human interferences and biogeoclimate. Plant Biosystems-An International Journal Dealing with all Aspects of Plant Biology, 146, 153–166.
Piovesan, G., Di Filippo, A., Alessandrini, A., Biondi, F., Schirone, B., et al. (2005). Structure, dynamics and dendroecology of an old‐growth fagus forest in the Apennines. Journal of Vegetation Science, 16, 13–28.
Piovesan, G., Bernabei, M., Di Filippo, A., Romagnoli, M., & Schirone, B. (2003). A long-term tree ring beech chronology from a high-elevation old-growth forest of Central Italy. Dendrochronologia, 21, 13–22. https://doi.org/10.1078/1125-7865-00036
Rozas, V. (2001). Detecting the impact of climate and disturbances on tree-rings of Fagus sylvatica L. and Quercus robur L. in a lowland forest in Cantabria, Northern Spain. Annals of Forest Science, 58, 237–251.
Nilsson, S. G., Niklasson, M., Hedin, J., Aronsson, G., Gutowski, J. M., Linder, P., Ljungberg, H., Mikusiński, G., & Ranius, T. (2003). Erratum to “Densities of large living and dead trees in old-growth temperate and boreal forests.” Forest Ecology and Management, 178, 355–370. https://doi.org/10.1016/S0378-1127(03)00084-7
Emborg, J., Christensen, M., & Heilmann-Clausen, J. (2000). The structural dynamics of Suserup Skov, a near-natural temperate deciduous forest in Denmark. Forest Ecology and Management, 126, 173–189. https://doi.org/10.1016/S0378-1127(99)00094-8
CBD. (2006). Convention on biological diversity indicative definitions taken from the report of the ad hoc technical expert group on forest biological diversity.
Barredo, J. I., Brailescu, C., Teller, A., Sabatini, F. M., Mauri, A., Janouskova, K. (2021). European Commission; Joint Research Centre Mapping and Assessment of Primary and Old-Growth Forests in Europe. ISBN 978-92-76-34230-4.
Eckelt, A., Müller, J., Bense, U., Brustel, H., Bußler, H., Chittaro, Y., Cizek, L., Frei, A., Holzer, E., Kadej, M., et al. (2018). “Primeval forest relict beetles” of Central Europe: A set of 168 umbrella species for the protection of primeval forest remnants. Journal of Insect Conservation, 22, 15–28. https://doi.org/10.1007/s10841-017-0028-6
Franklin, J. F., Spies, T. A., Pelt, R. V., Carey, A. B., Thornburgh, D. A., Berg, D. R., Lindenmayer, D. B., Harmon, M. E., Keeton, W. S., Shaw, D. C., et al. (2002). Disturbances and structural development of natural forest ecosystems with silvicultural implications, using Douglas-fir forests as an example. Forest Ecology and Management, 155, 399–423. https://doi.org/10.1016/S0378-1127(01)00575-8
Frey, S. J. K., Hadley, A. S., Johnson, S. L., Schulze, M., Jones, J. A., Betts, M. G. (2016). Spatial models reveal the microclimatic buffering capacity of old-growth forests. Science Advances, 2, e1501392. https://doi.org/10.1126/sciadv.1501392
Fritz, Ö., Niklasson, M., & Churski, M. (2009). Tree age is a key factor for the conservation of epiphytic lichens and bryophytes in beech forests. Applied Vegetation Science, 12, 93–106. https://doi.org/10.1111/j.1654-109X.2009.01007.x
Luyssaert, S., Schulze, E.-D., Börner, A., Knohl, A., Hessenmöller, D., Law, B. E., Ciais, P., & Grace, J. (2008). Old-growth forests as global carbon sinks. Nature, 455, 213–215. https://doi.org/10.1038/nature07276
de Assis Barros, L., Venter, M., Elkin, C., & Venter, O. (2022). Managing forests for old-growth attributes better promotes the provision of ecosystem services than current age-based old-growth management. Forest Ecology and Management, 511, 120130. https://doi.org/10.1016/j.foreco.2022.120130
Knorn, J., Kuemmerle, T., Radeloff, V. C., Keeton, W. S., Gancz, V., Biris, I.-A., Svoboda, M., Griffiths, P., Hagatis, A., & Hostert, P. (2012). Continued loss of temperate old-growth forests in the Romanian Carpathians despite an increasing protected area network. Environmental Conservation, 40, 182–193. https://doi.org/10.1017/s0376892912000355
Mikusiński, G., Bubnicki, J. W., Churski, M., Czeszczewik, D., Walankiewicz, W., Kuijper, D. P. J. (2018). Is the impact of loggings in the last primeval lowland forest in Europe underestimated? The conservation issues of Bialowie. Biological Conservation, 227, 266–274. https://doi.org/10.1016/j.biocon.2018.09.001
Martin, M., & Valeria, O. (2022). “Old” is not precise enough: Airborne laser scanning reveals age-related structural diversity within old-growth forests. Remote Sensing of Environment, 278, 113098. https://doi.org/10.1016/j.rse.2022.113098
Greenberg, C. H., McLeod, D. E., & Loftis, D. L. (1997). An old-growth definition for western and mixed mesophytic forests; U.S. Department of Agriculture, Forest Service, Southern Research Station: Asheville, NC, p. SRS-GTR-16.
Bergeron, Y., & Harper, K. A. (2009). Old-growth forests in the Canadian boreal: The exception rather than the rule? In Old-growth forests; Wirth, C., Gleixner, G., Heimann, M., Eds.; Ecological Studies; Springer Berlin Heidelberg: Berlin, Heidelberg, 207, pp. 285–300. ISBN 978-3-540-92705-1.
Kimmins, J. P. (2003). Old-growth forest: An ancient and stable sylvan equilibrium, or a relatively transitory ecosystem condition that offers people a visual and emotional feast? Answer—It depends. The Forestry Chronicle, 79. https://doi.org/10.5558/tfc79429-3.
Meyer, P., Aljes, M., Culmsee, H., Feldmann, E., Glatthorn, J., Leuschner, C., & Schneider, H. (2021). Quantifying old-growthness of lowland European beech forests by a multivariate indicator for forest structure. Ecological Indicators, 125, 107575. https://doi.org/10.1016/j.ecolind.2021.107575
de Assis Barros, L., & Elkin, C. (2021). An index for tracking old-growth value in disturbance-prone forest landscapes. Ecological Indicators, 121, 107175. https://doi.org/10.1016/j.ecolind.2020.107175
Wirth, C., Messier, C., Bergeron, Y., Frank, D., & Fankhänel, A. (2009). Old-growth forest definitions: A pragmatic view (pp. 11–33). Springer.
Buchwald, E. (2005). A hierarchical terminology for more or less natural forests in relation to sustainable management and biodiversity conservation. Food and Agriculture Organization of the United Nations.
Mikoláš, M., Ujházy, K., Jasík, M., Wiezik, M., Gallay, I., Polák, P., Vysoký, J., Čiliak, M., Meigs, G. W., & Svoboda, M. (2019). Primary forest distribution and representation in a Central European landscape: Results of a large-scale field-based census. Forest Ecology and Management, 449, 117466.
Motta, R., Garbarino, M., Berretti, R., Meloni, F., Nosenzo, A., & Vacchiano, G. (2015). Development of old-growth characteristics in uneven-aged forests of the Italian alps. European Journal of Forest Research, 134, 19–31. https://doi.org/10.1007/s10342-014-0830-6
Inoue, T., Nagai, S., Yamashita, S., Fadaei, H., Ishii, R., Okabe, K., ... & Suzuki, R. (2014). Unmanned aerial survey of fallen trees in a deciduous broadleaved forest in eastern Japan. PloS One, 9(10), e109881. https://doi.org/10.1371/journal.pone.0109881
Winter, S., Chirici, G., McRoberts, R. E., Hauk, E., & Tomppo, E. (2008). Possibilities for harmonizing national forest inventory data for use in forest biodiversity assessments. Forestry, 81, 33–44. https://doi.org/10.1093/forestry/cpm042
Hoffman, K. M., Trant, A. J., Nijland, W., & Starzomski, B. M. (2018). Ecological legacies of fire detected using plot-level measurements and LiDAR in an old growth coastal temperate rainforest. Forest Ecology and Management, 424, 11–20. https://doi.org/10.1016/j.foreco.2018.04.020
Gerard, F., et al. (2012). Assessing the role of EO in biodiversity monitoring. Options for integrating in-situ observations with EO within the context of the EBONE concept; EBONE: European Biodiversity Observation Network: Design of a plan for an integrated biodiversity observing system in space and time.
Norheim, R. A. (1998). Why so different? Examining the methodologies used in two old growth forest mapping projects. In Proceedings of the Proceedings of the 1998 International Geoscience and Remote Sensing Symposium (IGARSS), 3, 1620–1622.
Schickhofer, M., & Schwarz, U. (2019). Inventory of potential primary and old-growth forest areas in Romania (PRIMOFARO). Identifying the Largest in Act Forests in the Temperate Zone Oft HeE Uropean Union.
Spracklen, B. D., & Spracklen, D. V. (2019). Identifying European old-growth forests using remote sensing: A study in the Ukrainian Carpathians. Forests, 10, 127. https://doi.org/10.3390/f10020127
Moher, D., Liberati, A., Tetzlaff, J., & Altman, D. G. (2009). The PRISMA group preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. PLoS Medicine, 6, e1000097. https://doi.org/10.1371/journal.pmed.1000097
Lim, K., Treitz, P., Wulder, M., St-Onge, B., & Flood, M. (2003). LiDAR remote sensing of forest structure. Progress in Physical Geography, 27, 88–106.
Bohlin, J., Wallerman, J., & Fransson, J. E. (2012). Forest variable estimation using photogrammetric matching of digital aerial images in combination with a high-resolution DEM. Scandinavian Journal of Forest Research, 27, 692–699.
Neigh, C. S. R., Masek, J. G., Bourget, P., Cook, B., Huang, C., Rishmawi, K., & Zhao, F. (2014). Deciphering the precision of stereo IKONOS canopy height models for US forests with G-LiHT airborne LiDAR. Remote Sensing, 6, 1762–1782. https://doi.org/10.3390/rs6031762
Piermattei, L., Marty, M., Ginzler, C., Pöchtrager, M., Karel, W., Ressl, C., Pfeifer, N., & Hollaus, M. (2019). Pléiades satellite images for deriving forest metrics in the Alpine region. International Journal of Applied Earth Observation and Geoinformation, 80, 240–256. https://doi.org/10.1016/j.jag.2019.04.008
St-Onge, B., Hu, Y., & Vega, C. (2008). Mapping the height and above-ground biomass of a mixed forest using lidar and stereo Ikonos images. International Journal of Remote Sensing, 29, 1277–1294.
Wulder, M. A., Masek, J. G., Cohen, W. B., Loveland, T. R., & Woodcock, C. E. (2012). Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sensing of Environment, 122, 2–10. https://doi.org/10.1016/j.rse.2012.01.010
Keddy, P. A., & Drummond, C. G. (1996). Ecological properties for the evaluation, management, and restoration of temperate deciduous forest ecosystems. Ecological Applications, 6, 748–762. https://doi.org/10.2307/2269480
Duncker, P. S., Barreiro, S. M., Hengeveld, G. M., Lind, T., Mason, W. L., Ambrozy, S., & Spiecker, H. (2012). Classification of forest management approaches: A new conceptual framework and its applicability to European forestry. Ecology and Society, 17, art51. https://doi.org/10.5751/ES-05262-170451.
Christensen, M., Hahn, K., Mountford, E. P., Ódor, P., Standovár, T., Rozenbergar, D., Diaci, J., Wijdeven, S., Meyer, P., Winter, S., et al. (2005). Dead wood in European beech (Fagus Sylvatica) forest reserves. Forest Ecology and Management, 210, 267–282. https://doi.org/10.1016/j.foreco.2005.02.032
Marchi, N., Pirotti, F., & Lingua, E. (2018). Airborne and terrestrial laser scanning data for the assessment of standing and lying deadwood: Current situation and new perspectives. Remote Sensing, 10, 1356. https://doi.org/10.3390/rs10091356
Curovic, M., Spalevic, V., Sestras, P., Motta, R., Catalina, D. A. N., Garbarino, M., Vitali, A., & Urbinati, C. (2020). Structural and ecological characteristics of mixed broadleaved old-growth forest (Biogradska Gora-Montenegro). Turkish Journal of Agriculture and Forestry, 44, 428–438.
Motta, R., Garbarino, M., Berretti, R., Bjelanovic, I., Borgogno Mondino, E., Čurović, M., ... & Nosenzo, A. (2014). Structure, spatio-temporal dynamics and disturbance regime of the mixed beech–silver fir–Norway spruce old-growth forest of Biogradska Gora (Montenegro). Plant Biosystems-An International Journal Dealing with all Aspects of Plant Biology, 149, 966–975. https://doi.org/10.1080/11263504.2014.945978
Cheng, C., Chen, Y., Juan, H., & Yeh, K.-S. (2005). Classification of old-growth cypress in Chilan mountains using photogrammetry and remote sensing.
Martin, M., Cerrejón, C., & Valeria, O. (2021). Complementary airborne LiDAR and satellite indices are reliable predictors of disturbance-induced structural diversity in mixed old-growth forest landscapes. Remote Sensing of Environment, 267, 112746. https://doi.org/10.1016/j.rse.2021.112746
Benson, M. L., Pierce, L., Bergen, K., & Sarabandi, K. (2021). Model-based estimation of forest canopy height and biomass in the Canadian Boreal forest using radar, LiDAR, and optical remote sensing. IEEE Transactions on Geoscience and Remote Sensing, 59, 4635–4653. https://doi.org/10.1109/TGRS.2020.3018638
Jeronimo, S. M. A., Kane, V. R., Churchill, D. J., McGaughey, R. J., & Franklin, J. F. (2018). Applying LiDAR individual tree detection to management of structurally diverse forest landscapes. Journal of Forestry, 116, 336–346. https://doi.org/10.1093/jofore/fvy023
White, J. C., Coops, N. C., Wulder, M. A., Vastaranta, M., Hilker, T., & Tompalski, P. (2016). Remote sensing technologies for enhancing forest inventories: A review. Canadian Journal of Remote Sensing, 42, 619–641.
Zhen, Z., Quackenbush, L., & Zhang, L. (2016). Trends in automatic individual tree crown detection and delineation—Evolution of LiDAR data. Remote Sensing, 8, 333. https://doi.org/10.3390/rs8040333
Kaartinen, H., Hyyppä, J., Yu, X., Vastaranta, M., Hyyppä, H., Kukko, A., Holopainen, M., Heipke, C., Hirschmugl, M., Morsdorf, F., et al. (2012). An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sensing, 4, 950–974.
Potapov, P., Li, X., Hernandez-Serna, A., Tyukavina, A., Hansen, M. C., Kommareddy, A., Pickens, A., Turubanova, S., Tang, H., Silva, C. E., et al. (2021). Mapping global forest canopy height through integration of GEDI and Landsat data. Remote Sensing Environment 253, 112165. https://doi.org/10.1016/j.rse.2020.112165
Qi, W., Lee, S.-K., Hancock, S., Luthcke, S., Tang, H., Armston, J., & Dubayah, R. (2019). Improved forest height estimation by fusion of simulated GEDI Lidar data and TanDEM-X InSAR data. Remote Sensing of Environment, 221, 621–634. https://doi.org/10.1016/j.rse.2018.11.035
Spracklen, B., & Spracklen, D. V. (2021). Determination of structural characteristics of old-growth forest in Ukraine using spaceborne LiDAR. Remote Sensing, 13, 1233. https://doi.org/10.3390/rs13071233
Willim, K., Stiers, M., Annighöfer, P., Ehbrecht, M., Ammer, C., & Seidel, D. (1907). Spatial patterns of structural complexity in differently managed and unmanaged beech-dominated forests in Central Europe. Remote Sensing, 2020, 12. https://doi.org/10.3390/rs12121907
Willim, K., Stiers, M., Annighöfer, P., Ammer, C., Ehbrecht, M., Kabal, M., ... & Seidel, D. (2019). Assessing understory complexity in beech-dominated forests (Fagus sylvatica L.) in Central Europe—From managed to primary forests. Sensors, 19, 1684. https://doi.org/10.3390/s19071684
Dan, L., Yong, P., & CaiRong, Y. (2012). A review of TLS application in forest parameters retrieving. World Resources Institute, 25, 34–39.
Hastings, J. H., Ollinger, S. V., Ouimette, A. P., Sanders-DeMott, R., Palace, M. W., Ducey, M. J., Sullivan, F. B., Basler, D., & Orwig, D. A. (2020). Tree species traits determine the success of LiDAR-based crown mapping in a mixed temperate forest. Remote Sensing, 12, 309. https://doi.org/10.3390/rs12020309
Leckie, D. G., Gougeon, F. A., Tinis, S., Nelson, T., Burnett, C. N., & Paradine, D. (2005). Automated tree recognition in old growth conifer stands with high resolution digital imagery. Remote Sensing of Environment, 94, 311–326.
Kamińska, A., Lisiewicz, M., & Stereńczak, K. (2021). Single tree classification using multi-temporal ALS data and CIR imagery in mixed old-growth forest in Poland. Remote Sensing, 13, 5101. https://doi.org/10.3390/rs13245101
Bian, Y., Zou, P., Shu, Y., & Yu, R. (2014). Individual tree delineation in deciduous forest areas with LiDAR point clouds. Canadian Journal of Remote Sensing, 40(2), 152-163. https://doi.org/10.1080/07038992.2014.943700
Dalponte, M., & Coomes, D. A. (2016). Tree-centric mapping of forest carbon density from airborne laser scanning and hyperspectral data. Methods in Ecology and Evolution, 7, 1236–1245. https://doi.org/10.1111/2041-210X.12575
Dersch, S., Heurich, M., Krueger, N., & Krzystek, P. (2021). Combining graph-cut clustering with object-based stem detection for tree segmentation in highly dense airborne lidar point clouds. ISPRS Journal of Photogrammetry and Remote Sensing, 172, 207–222. https://doi.org/10.1016/j.isprsjprs.2020.11.016
Ferraz, A., Bretar, F., Jacquemoud, S., Gonçalves, G., Pereira, L., Tomé, M., & Soares, P. (2012). 3-D mapping of a multi-layered Mediterranean forest using ALS data. Remote Sensing of Environment, 121, 210–223. https://doi.org/10.1016/j.rse.2012.01.020
Heurich, M. (2008). Automatic recognition and measurement of single trees based on data from airborne laser scanning over the richly structured natural forests of the Bavarian Forest National Park. Forest Ecology and Management, 255, 2416–2433. https://doi.org/10.1016/j.foreco.2008.01.022
Holmgren, J., & Lindberg, E. (2019). Tree crown segmentation based on a tree crown density model derived from airborne laser scanning. Remote Sensing Letters, 10, 1143–1152. https://doi.org/10.1080/2150704X.2019.1658237
Krzystek, P., Serebryanyk, A., Schnörr, C., Červenka, J., & Heurich, M. (2020). Large-scale mapping of tree species and dead trees in šumava national park and bavarian forest national park using lidar and multispectral imagery. Remote Sensing, 12, 661. https://doi.org/10.3390/rs12040661
Li, W., Guo, Q., Jakubowski, M. K., & Kelly, M. (2012). A new method for segmenting individual trees from the lidar point cloud. Photogrammetric Engineering and Remote Sensing, 78, 75–84. https://doi.org/10.14358/PERS.78.1.75
Lindberg, E., Eysn, L., Hollaus, M., Holmgren, J., & Pfeifer, N. (2014). Delineation of tree crowns and tree species classification from full-waveform airborne laser scanning data using 3-D ellipsoidal clustering. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 7(7), 3174-3181.https://doi.org/10.1109/JSTARS.2014.2331276
Lu, X., Guo, Q., Li, W., & Flanagan, J. (2014). A bottom-up approach to segment individual deciduous trees using leaf-off lidar point cloud data. ISPRS Journal of Photogrammetry and Remote Sensing, 94, 1–12. https://doi.org/10.1016/j.isprsjprs.2014.03.014
Mongus, D., & Žalik, B. (2015). An efficient approach to 3D single ree-crown delineation in LiDAR data. ISPRS Journal of Photogrammetry and Remote Sensing, 108, 219–233. https://doi.org/10.1016/j.isprsjprs.2015.08.004
Mustafić, S., & Schardt, M. (2019). Deep-Learning-basierte Baumartenklassifizierung auf Basis von multitemporalen ALS-Daten; Wichmann Verlag: DE. ISBN 978-3-87907-669-7.
Pang, Y., Wang, W., Du, L., Zhang, Z., Liang, X., Li, Y., & Wang, Z. (2021). Nyström-based spectral clustering using airborne LiDAR point cloud data for individual tree segmentation. International Journal of Digital Earth, 1–25. https://doi.org/10.1080/17538947.2021.1943018
Paris, C., Valduga, D., & Bruzzone, L. (2015) A hierarchical approach to the segmentation of single dominant and dominated trees in forest areas by using high-density LiDAR data. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS); IEEE: Milan, Italy; pp. 65–68.
Reitberger, J., Schnörr, C., Krzystek, P., & Stilla, U. (2009). 3D segmentation of single trees exploiting full waveform LIDAR data. ISPRS Journal of Photogrammetry and Remote Sensing, 64(6), 561-574. https://doi.org/10.1016/j.isprsjprs.2009.04.002
Sačkov, I., Kulla, L., & Bucha, T. (2019). A comparison of two tree detection methods for estimation of forest stand and ecological variables from airborne LiDAR data in central european forests. Remote Sensing, 11, 1431. https://doi.org/10.3390/rs11121431
Silva, C. A., Hudak, A. T., Vierling, L. A., Loudermilk, E. L., O’Brien, J. J., Hiers, J. K., ... & Khosravipour, A. (2016). Imputation of individual longleaf pine ( Pinus Palustris Mill.) tree attributes from field and LiDAR data. Canadian Journal of Remote Sensing, 42, 554–573. https://doi.org/10.1080/07038992.2016.1196582
St-Onge, B., Jumelet, J., Cobello, M., & Véga, C. (2004). Measuring individual tree height using a combination of stereophotogrammetry and lidar. Canadian Journal of Forest Research, 34, 2122–2130. https://doi.org/10.1139/x04-093
Tang, S., Dong, P., & Buckles, B. P. (2013). Three-dimensional surface reconstruction of tree canopy from lidar point clouds using a region-based level set method. International Journal of Remote Sensing, 34, 1373–1385. https://doi.org/10.1080/01431161.2012.720046
Vega, C., Hamrouni, A., El Mokhtari, S., Morel, J., Bock, J., Renaud, J.-P., Bouvier, M., & Durrieu, S. (2014). PTrees: A point-based approach to forest tree extraction from lidar data. International Journal of Applied Earth Observation and Geoinformation, 33, 98–108. https://doi.org/10.1016/j.jag.2014.05.001
Windrim, L., & Bryson, M. (2020). Detection, segmentation, and model fitting of individual tree stems from airborne laser scanning of forests using deep learning. Remote Sensing, 12, 1469. https://doi.org/10.3390/rs12091469
Yin, W., Yang, J., Yamamoto, H., & Li, C. (2015). Object-based larch tree-crown delineation using high-resolution satellite imagery. International Journal of Remote Sensing, 36, 822–844. https://doi.org/10.1080/01431161.2014.999165
Ardila, J. P., Bijker, W., Tolpekin, V. A., & Stein, A. (2012). Context-sensitive extraction of tree crown objects in urban areas using VHR satellite images. International Journal of Applied Earth Observation and Geoinformation, 15, 57–69. https://doi.org/10.1016/j.jag.2011.06.005
Braga, G., Peripato, J. R., Dalagnol, V., Ferreira, R. P., Tarabalka, M., & Aragão, L. E. (2020). Tree crown delineation algorithm based on a convolutional neural network. Remote Sensing, 12, 1288. https://doi.org/10.3390/rs12081288
Hirschmugl, M., Ofner, M., Raggam, H., & Schardt, M. (2007). Single tree detection in very high resolution remote sensing data. Remote Sensing of Environment, 110, 533–544.
Skurikhin, A. N., McDowell, N. G., & Middleton, R. S. (2016). Unsupervised individual tree crown detection in high-resolution satellite imagery. Journal of Applied Remote Sensing, 10, 010501. https://doi.org/10.1117/1.JRS.10.010501
Song, C., Dickinson, M. B., Su, L., Zhang, S., & Yaussey, D. (2010). Estimating average tree crown size using spatial information from Ikonos and QuickBird images: Across-sensor and across-site comparisons. Remote Sensing of Environment, 114, 1099–1107. https://doi.org/10.1016/j.rse.2009.12.022
Windrim, L., Carnegie, A. J., Webster, M., & Bryson, M. (2020). Tree detection and health monitoring in multispectral aerial imagery and photogrammetric pointclouds using machine learning. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 13, 2554-2572. https://doi.org/10.1109/JSTARS.2020.2995391
Hallberg, B., Smith-Jonforsen, G., & Ulander, L. M. H. (2005). Measurements on individual trees using multiple VHF SAR images. IEEE Transactions on Geoscience and Remote Sensing, 43, 2261–2269. https://doi.org/10.1109/TGRS.2005.855622
Kononov, A. A., & Ka, M.-H. (2008). Model-associated forest parameter retrieval using VHF SAR data at the individual tree level. IEEE Transactions on Geoscience and Remote Sensing, 46, 69–84. https://doi.org/10.1109/TGRS.2007.907107
Magnard, C., Morsdorf, F., Small, D., Stilla, U., Schaepman, M. E., & Meier, E. (2016). Single tree identification using airborne multibaseline SAR interferometry data. Remote Sensing of Environment, 186, 567–580. https://doi.org/10.1016/j.rse.2016.09.018
Maksymiuk, O., Schmitt, M., Auer, S., & Stilla, U. (2014). Single tree detection in millimeterwave SAR data by morphological attribute filters. Proc. Jahrestag. DGPF, 34.
Schmitt, M., Brück, A., Schönberger, J., & Stilla, U. (2013). Potential of airborne single-pass millimeterwave InSAR data for individual tree recognition, 11.
Korpela, I. (2004). Individual tree measurements by means of digital aerial photogrammetry. The Finnish Society of Forest Science.
St-Onge, B., & Grandin, S. (2019). Estimating the height and basal area at individual tree and plot levels in Canadian subarctic lichen woodlands using stereo WorldView-3 images. Remote Sensing, 11, 248. https://doi.org/10.3390/rs11030248
Kumar, P., & Krishna, A. P. (2019). InSAR-based tree height estimation of hilly forest using multitemporal Radarsat-1 and Sentinel-1 SAR data. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 12(12), 5147–5152. https://doi.org/10.1109/JSTARS.2019.2963443
Rahimizadeh, N., Sahebi, M. R., Babaie Kafaky, S., & Mataji, A. (2021). Estimation of trees height and vertical structure using SAR interferometry in uneven-aged and mixed forests. Environmental Monitoring and Assessment, 193, 298. https://doi.org/10.1007/s10661-021-09095-x
Lefsky, M. A., Cohen, W. B., Acker, S. A., Parker, G. G., Spies, T. A., & Harding, D. (1999). Lidar remote sensing of the canopy structure and biophysical properties of Douglas-fir western hemlock forests. Remote Sensing of Environment, 70, 339–361. https://doi.org/10.1016/S0034-4257(99)00052-8
Barros de Assis, L. (2019). Assesssing set aside old-growth forests with airborne LiDAR metrics.; University of Northern British Columbia: University of Northern British Columbia, Prince George.
Means, J. E., Acker, S. A., Fitt, B. J., Renslow, M., Emerson, L., & Hendrix, C. J. (2000). Predicting forest stand characteristics with airborne scanning lidar. Photogrammetric Engineering and Remote Sensing, 66, 1367–1372.
Zellweger, F., Braunisch, V., Baltensweiler, A., & Bollmann, K. (2013). Remotely sensed forest structural complexity predicts multi species occurrence at the landscape scale. Forest Ecology and Management, 307, 303–312. https://doi.org/10.1016/j.foreco.2013.07.023
Giannico, V., Lafortezza, R., John, R., Sanesi, G., Pesola, L., & Chen, J. (2016). Estimating stand volume and above-ground biomass of urban forests using LiDAR. Remote Sensing, 8, 339. https://doi.org/10.3390/rs8040339
Lagomasino, D., Fatoyinbo, T., Lee, S., Feliciano, E., Trettin, C., & Simard, M. (2016). A comparison of mangrove canopy height using multiple independent measurements from land, air, and space. Remote Sensing, 8, 327. https://doi.org/10.3390/rs8040327
Lee, J., Im, J., Kim, K., & Quackenbush, L. (2018). Machine learning approaches for estimating forest stand height using plot-based observations and airborne LiDAR data. Forests, 9, 268. https://doi.org/10.3390/f9050268
Persson, H. J. (2016). Estimation of boreal forest attributes from very high resolution Pléiades data. Remote Sensing, 8, 736. https://doi.org/10.3390/rs8090736
Wittke, S., Yu, X., Karjalainen, M., Hyyppä, J., & Puttonen, E. (2019). Comparison of two-dimensional multitemporal Sentinel-2 data with three-dimensional remote sensing data sources for forest inventory parameter estimation over a boreal forest. International Journal of Applied Earth Observation and Geoinformation, 76, 167–178. https://doi.org/10.1016/j.jag.2018.11.009
Yu, X., Hyyppä, J., Karjalainen, M., Nurminen, K., Karila, K., Vastaranta, M., Kankare, V., Kaartinen, H., Holopainen, M., Honkavaara, E., et al. (2015). Comparison of laser and stereo optical, SAR and InSAR point clouds from air- and space-borne sources in the retrieval of forest inventory attributes. Remote Sensing, 7, 15933–15954. https://doi.org/10.3390/rs71215809
Hirschmugl, M. (2008). Derivation of forest parameters from UltracamD data. phdthesis, Graz University of Technology.
Immitzer, M., Stepper, C., Böck, S., Straub, C., & Atzberger, C. (2016). Use of WorldView-2 stereo imagery and National Forest Inventory data for wall-to-wall mapping of growing stock. Forest Ecology and Management, 359, 232–246.
Persson, H. J., & Perko, R. (2016). Assessment of boreal forest height from WorldView-2 satellite stereo images. Remote Sensing Letters, 7, 1150–1159. https://doi.org/10.1080/2150704X.2016.1219424
Vastaranta, M., Wulder, M. A., White, J. C., Pekkarinen, A., Tuominen, S., Ginzler, C., Kankare, V., Holopainen, M., Hyyppä, J., & Hyyppä, H. (2013). Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update. Canadian Journal of Remote Sensing, 39, 382–395. https://doi.org/10.5589/m13-046
Haarpaintner, J., Trier, Ø., Salberg, A.-B., Aarsten, D., Gobakken, T., Næsset, E. (2018). Multi-sensor forest vegetation height mapping methods for Tanzania. European Journal of Remote Sensing, 51. https://doi.org/10.1080/22797254.2018.1461533
Hall, R., Skakun, R., Arsenault, E., & Case, B. (2006). Modeling forest stand structure attributes using Landsat ETM+ data: Application to mapping of aboveground biomass and stand volume. Forest Ecology and Management, 225, 378–390.
Murtha, P. A., & Pollock, R. J. (1996). Airborne SAR studies of North Vancouver Island rainforests. Canadian Journal of Remote Sensing, 22, 175–183. https://doi.org/10.1080/07038992.1996.10874651
Treuhaft, R. N., Moghaddam, M., & Yoder, B. J. (1997). Forest vertical structure from multibaseline interferometric radar for studying growth and productivity. In Proceedings of the Proceedings of the 1997 International Geoscience and Remote Sensing Symposium (IGARSS), 4, 1884–1886.
Balzter, H., Rowland, C. S., & Saich, P. (2007). Forest canopy height and carbon estimation at Monks Wood National Nature Reserve, UK, using dual-wavelength SAR interferometry. Remote Sensing of Environment, 108, 224–239. https://doi.org/10.1016/j.rse.2006.11.014
Karjalainen, M., Kankare, V., Vastaranta, M., Holopainen, M., & Hyyppä, J. (2012). Prediction of plot-level forest variables using TerraSAR-X stereo SAR data. Remote Sensing of Environment, 117, 338–347. https://doi.org/10.1016/j.rse.2011.10.008
Kumar, S., Khati, U. G., Chandola, S., Agrawal, S., & Kushwaha, S. P. S. (2017). Polarimetric SAR interferometry based modeling for tree height and aboveground biomass retrieval in a tropical deciduous forest. Advances in Space Research, 60, 571–586. https://doi.org/10.1016/j.asr.2017.04.018
Lei, Y., Treuhaft, R., & Gonçalves, F. (2021). Automated estimation of forest height and underlying topography over a Brazilian tropical forest with single-baseline single-polarization TanDEM-X SAR interferometry. Remote Sensing of Environment, 252, 112132. https://doi.org/10.1016/j.rse.2020.112132
Lei, Y., & Siqueira, P. (2014). Estimation of forest height using spaceborne repeat-pass L-band InSAR correlation magnitude over the US state of Maine. Remote Sensing, 6, 10252–10285. https://doi.org/10.3390/rs61110252
Perko, R., Raggam, H., Deutscher, J., Karlheinz, G., & Schardt, M. (2011). Forest assessment using high resolution SAR data in X-Band. Remote Sensing, 3, 792–815. https://doi.org/10.3390/rs3040792
Pourshamsi, M., Xia, J., Yokoya, N., García, M., Lavalle, M., Pottier, E., & Balzter, H. (2021). Tropical forest canopy height estimation from combined polarimetric SAR and LiDAR using machine-learning. ISPRS Journal of Photogrammetry and Remote Sensing, 172, 79–94. https://doi.org/10.1016/j.isprsjprs.2020.11.008
Sexton, J., Bax, T., Siqueira, P., Swenson, J., & Hensley, S. (2009). A comparison of lidar, radar, and field measurements of canopy height in pine and hardwood forests of southeastern North America. Forest Ecology and Management, 257, 1136–1147. https://doi.org/10.1016/j.foreco.2008.11.022
Tighe, M. L., King, D., Balzter, H., & McNairn, H. (2009). Comparison of canopy height models derived from STRM/NED and NEXTMAP® USA elevation data, 9.
Jiang, F., Zhao, F., Ma, K., Li, D., & Sun, H. (2021). Mapping the forest canopy height in Northern China by synergizing ICESat-2 with Sentinel-2 using a stacking algorithm. Remote Sensing, 13, 1535.
Popescu, S. C., Zhao, K., Neuenschwander, A., & Lin, C. (2011). Satellite lidar vs. small footprint airborne lidar: Comparing the accuracy of aboveground biomass estimates and forest structure metrics at footprint level. Remote Sensing of Environment, 115, 2786–2797. https://doi.org/10.1016/j.rse.2011.01.026
Pesonen, A., Maltamo, M., Eerikäinen, K., & Packalèn, P. (2008). Airborne laser scanning-based prediction of coarse woody debris volumes in a conservation area. Forest Ecology and Management, 255, 3288–3296. https://doi.org/10.1016/j.foreco.2008.02.017
Jarron, L. R., Coops, N. C., MacKenzie, W. H., & Dykstra, P. (2021). Detection and quantification of coarse woody debris in natural forest stands using airborne LiDAR. Forestry Sciences, 67, 550–563. https://doi.org/10.1093/forsci/fxab023
Maltamo, M., Kallio, E., Bollandsås, O. M., Næsset, E., Gobakken, T., & Pesonen, A. (2014). Assessing dead wood by airborne laser scanning. In Forestry applications of airborne laser scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer Netherlands: Dordrecht, Vol. 27, pp. 375–395. ISBN 978-94-017-8662-1.
Yao, W., Krzystek, P., & Heurich, M. (2012). Identifying standing dead trees in forest areas based on 3D single tree detection from full waveform lidar data. The ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, I–7, 359–364. https://doi.org/10.5194/isprsannals-I-7-359-2012
Amiri, N., Krzystek, P., Heurich, M., & Skidmore, A. (2019). Classification of tree species as well as standing dead trees using triple wavelength ALS in a temperate forest. Remote Sensing, 11, 2614. https://doi.org/10.3390/rs11222614
Bater, C., Coops, N., Gergel, S., & Goodwin, N. (2007). Towards the estimation of tree structural class in northwest coastal forests using lidar remote sensing.
Casas, Á., García, M., Siegel, R. B., Koltunov, A., Ramírez, C., & Ustin, S. (2016). Burned forest characterization at single-tree level with airborne laser scanning for assessing wildlife habitat. Remote Sensing of Environment, 175, 231–241. https://doi.org/10.1016/j.rse.2015.12.044
Kim, Y., Yang, Z., Cohen, W. B., Pflugmacher, D., Lauver, C. L., & Vankat, J. L. (2009). Distinguishing between live and dead standing tree biomass on the North Rim of Grand Canyon National Park, USA using small-footprint lidar data. Remote Sensing of Environment, 113, 2499–2510. https://doi.org/10.1016/j.rse.2009.07.010
Polewski, P., Yao, W., Heurich, M., Krzystek, P., & Stilla, U. (2015). Active learning approach to detecting standing dead trees from ALS point clouds combined with aerial infrared imagery. In Proceedings of the Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, pp. 10–18.
Wing, B. M., Ritchie, M. W., Boston, K., Cohen, W. B., & Olsen, M. J. (2015). Individual snag detection using neighborhood attribute filtered airborne lidar data. Remote Sensing of Environment, 163, 165–179. https://doi.org/10.1016/j.rse.2015.03.013
Guo, Q., Kelly, M., Gong, P., & Liu, D. (2007). An object-based classification approach in mapping tree mortality using high spatial resolution imagery. GIScience Remote Sensing, 44, 24–47. https://doi.org/10.2747/1548-1603.44.1.24
Jiang, S., Yao, W., & Heurich, M. (2019). Dead wood detection based on semantic segmentation of VHR aerial CIR imagery using pptimized FCN-Densenet.; Copernicus GmbH.
Kelly, M., Shaari, D., Guo, Q., & Liu, D. (2004). A comparison of standard and hybrid classifier methods for mapping hardwood mortality in areas affected by “sudden oak death.” Photogrammetric Engineering and Remote Sensing, 70, 1229–1239. https://doi.org/10.14358/PERS.70.11.1229
Lopes Queiroz, G., McDermid, G. J., Castilla, G., Linke, J., & Rahman, M. M. (2019). Mapping coarse woody debris with random forest classification of centimetric aerial imagery. Forests, 10, 471. https://doi.org/10.3390/f10060471
Pasher, J., & King, D. J. (2009). Mapping dead wood distribution in a temperate hardwood forest using high resolution airborne imagery. Forest Ecology and Management, 258, 1536–1548. https://doi.org/10.1016/j.foreco.2009.07.009
Matsala, M., Myroniuk, V., Bilous, A., Terentiev, A., Diachuk, P., & Zadorozhniuk, R. (2020). An indirect approach to predict deadwood biomass in forests of Ukrainian Polissya using Landsat images and terrestrial data. Stud Definition, 73, 107–124.
Fernandez-Carrillo, A., Patočka, Z., Dobrovolný, L., Franco-Nieto, A., & Revilla-Romero, B. (2020). Monitoring bark beetle forest damage in Central Europe. A remote sensing approach validated with field data. Remote Sensing, 12(21), 3634. https://doi.org/10.3390/rs12213634
Mücke, W., Hollaus, M., Pfeifer, N., Schroiff, A., & Deák, B. (2013). Comparison of discrete and full-waveform ALS for dead wood detection. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2, 199–204. https://doi.org/10.5194/isprsannals-II-5-W2-199-2013
Blanchard, S. D., Jakubowski, M. K., & Kelly, M. (2011). Object-based image analysis of downed logs in disturbed forested landscapes using lidar. Remote Sensing, 3, 2420–2439. https://doi.org/10.3390/rs3112420
Lindberg, E., Hollaus, M., Mücke, W., Fransson, J. E., & Pfeifer, N. (2013). Detection of lying tree stems from airborne laser scanning data using a line template matching algorithm. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, II-5/W2, 169–174. https://doi.org/10.5194/isprsannals-II-5-W2-169-2013
Polewski, P., Yao, W., Heurich, M., Krzystek, P., & Stilla, U. (2015). Detection of fallen trees in ALS point clouds using a normalized cut approach trained by simulation. ISPRS Journal of Photogrammetry and Remote Sensing, 105, 252–271. https://doi.org/10.1016/j.isprsjprs.2015.01.010
Polewski, P., Yao, W., Heurich, M., Krzystek, P., & Stilla, U. (2014). Detection of fallen trees in ALS point clouds by learning the normalized cut similarity function from simulated samples. The ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, II–3, 111–118. https://doi.org/10.5194/isprsannals-II-3-111-2014
Korhonen, L., Packalen, P., & Rautiainen, M. (2017). Comparison of Sentinel-2 and Landsat 8 in the estimation of boreal forest canopy cover and leaf area index. Remote Sensing of environment, 195, 259–274. https://doi.org/10.1016/j.rse.2017.03.021
Arumäe, T., & Lang, M. (2018). Estimation of canopy cover in dense mixed-species forests using airborne lidar data. European Journal of Remote Sensing, 51, 132–141.
Stojanova, D., Panov, P., Gjorgjioski, V., Kobler, A., & Džeroski, S. (2010). Estimating vegetation height and canopy cover from remotely sensed data with machine learning. Ecological Informatics, 5, 256–266.
Rehush, N., & Waser, L. T. (2017). Assessing the structure of primeval and managed beech forests in the Ukrainian Carpathians using remote sensing. Canadian Journal of Forest Research, 47, 63–72. https://doi.org/10.1139/cjfr-2016-0253
Bulut, S., Günlü, A., & Keleş, S. (2019). Estimation of forest development stage and crown closure using different classification methods and satellite images: A case study from Turkey. Journal of Forest Science, 65, 18–26. https://doi.org/10.17221/127/2018-JFS
Koju, U. A., Zhang, J., Maharjan, S., Zhang, S., Bai, Y., Vijayakumar, D. B. I. P., & Yao, F. (2019). A two-scale approach for estimating forest aboveground biomass with optical remote sensing images in a subtropical forest of Nepal. Journal of Forest Research, 30, 2119–2136. https://doi.org/10.1007/s11676-018-0743-1
Ma, Q., Su, Y., & Guo, Q. (2017). Comparison of canopy cover estimations from airborne LiDAR, aerial imagery, and satellite imagery. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, PP, 1–12. https://doi.org/10.1109/JSTARS.2017.2711482
McPherson, G. E., Simpson, J. R., Xiao, Q., & Chunxia, W. (2008). Los Angeles 1-Million Tree Canopy Cover Assessment; U.S. Department of Agriculture, Forest Service, Pacific Southwest Research Station: Albany, CA, p. PSW-GTR-207. https://doi.org/10.2737/PSW-GTR-207
Melin, M., Korhonen, L., Kukkonen, M., & Packalen, P. (2017). Assessing the performance of aerial image point cloud and spectral metrics in predicting boreal forest canopy cover. ISPRS Journal of Photogrammetry and Remote Sensing, 129, 77–85. https://doi.org/10.1016/j.isprsjprs.2017.04.018
Toney, C., Liknes, G., Lister, A., & Meneguzzo, D. (2010). Assessing alternative measures of tree canopy cover: Photo-interpreted NAIP and ground-based estimates, 7.
Banerjee, K., & Bandyopadhyay, D. J. (2014). Forest canopy density mapping using advance geospatial technique. International Journal of Innovative Science and Research Technology, 1, 358–363.
Coulston, J. W., Moisen, G. G., Wilson, B. T., Finco, M. V., Cohen, W. B., & Brewer, C. K. (2012). Modeling percent tree canopy cover: a pilot study. Photogrammetric Engineering and Remote Sensing, 78, 715–727.
Godinho, S., Guiomar, N., & Gil, A. (2018). Estimating tree canopy cover percentage in a Mediterranean silvopastoral systems using Sentinel-2A imagery and the stochastic gradient boosting algorithm. International Journal of Remote Sensing, 39, 4640–4662. https://doi.org/10.1080/01431161.2017.1399480
Homer, C., Dewitz, J., Fry, J., Coan, M., Hossain, N., Larson, C., ... & Wickham, J. (2001). Completion of the national land cover database for the conterminous United States. Photogrammetric Engineering and Remote Sensing, 2007, 73.
Huang, X., Wu, W., Shen, T., Xie, L., Qin, Y., Peng, S., Zhou, X., Fu, X., Li, J., & Zhang, Z. (2021). Estimating forest canopy cover by multiscale remote sensing in Northeast Jiangxi, China. Land, 10, 433.
Devaney, J., Barret, B., Barrett, F., Redmond, J., O’Halloran, J. (2015). Forest cover estimation in Ireland using radar remote sensing: A comparative analysis of forest cover assessment methodologies. PLoS ONE, 27.
Naidoo, L., Mathieu, R., Main, R., Kleynhans, W., Wessels, K., Asner, G., & Leblon, B. (2015). Savannah woody structure modelling and mapping using multi-frequency (X-, C- and L-band) synthetic aperture radar data. ISPRS Journal of Photogrammetry and Remote Sensing, 105, 234–250. https://doi.org/10.1016/j.isprsjprs.2015.04.007
Armston, J., Disney, M., Lewis, P., Scarth, P., Phinn, S., Lucas, R., Bunting, P., & Goodwin, N. (2013). Direct retrieval of canopy gap probability using airborne waveform lidar. Remote Sensing of Environment, 134, 24–38. https://doi.org/10.1016/j.rse.2013.02.021
Asner, G. P., Kellner, J. R., Kennedy-Bowdoin, T., Knapp, D. E., Anderson, C., & Martin, R. E. (2013). Forest canopy gap distributions in the southern Peruvian Amazon. PloS One, 8, e60875. https://doi.org/10.1371/journal.pone.0060875
Chen, X. T., Disney, M. I., Lewis, P., Armston, J., Han, J. T., & Li, J. C. (2014). Sensitivity of direct canopy gap fraction retrieval from airborne waveform lidar to topography and survey characteristics. Remote Sensing of Environment, 143, 15–25. https://doi.org/10.1016/j.rse.2013.12.010
Dietmaier, A., McDermid, G. J., Rahman, M. M., Linke, J., & Ludwig, R. (1919). Comparison of LiDAR and digital aerial photogrammetry for characterizing canopy openings in the Boreal Forest of Northern Alberta. Remote Sensing, 2019, 11. https://doi.org/10.3390/rs11161919
Gaulton, R., & Malthus, T. J. (2010). LiDAR mapping of canopy gaps in continuous cover forests: A comparison of canopy height model and point cloud based techniques. International Journal of Remote Sensing, 31, 1193–1211. https://doi.org/10.1080/01431160903380565
Heiskanen, J., Korhonen, L., Hietanen, J., & Pellikka, P. K. E. (2015). Use of airborne lidar for estimating canopy gap fraction and leaf area index of tropical montane forests. International Journal of Remote Sensing, 36, 2569–2583. https://doi.org/10.1080/01431161.2015.1041177
Hopkinson, C., & Chasmer, L. E. (2007). Modelling canopy gap fraction from lidar intensity. In Proceedings of the ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007; IAPRS Espoo, Finland, pp. 190–194.
Vepakomma, U., St-Onge, B., & Kneeshaw, D. (2008). Spatially explicit characterization of boreal forest gap dynamics using multi-temporal lidar data. Remote Sensing of Environment, 112, 2326–2340. https://doi.org/10.1016/j.rse.2007.10.001
White, J. C., Tompalski, P., Coops, N. C., & Wulder, M. A. (2018). Comparison of airborne laser scanning and digital stereo imagery for characterizing forest canopy gaps in coastal temperate rainforests. Remote Sensing of Environment, 208, 1–14. https://doi.org/10.1016/j.rse.2018.02.002
Kane, V. R., Gersonde, R. F., Lutz, J. A., McGaughey, R. J., Bakker, J. D., & Franklin, J. F. (2011). Patch dynamics and the development of structural and spatial heterogeneity in Pacific Northwest forests. Canadian Journal of Forest Research, 41, 2276–2291. https://doi.org/10.1139/x11-128
Rugani, T., Diaci, J., & Hladnik, D. (2013). Gap dynamics and structure of two old-growth beech forest remnants in Slovenia. PLoS One, 8, e52641. https://doi.org/10.1371/journal.pone.0052641
Garbarino, M., Mondino, E. B., Lingua, E., Nagel, T. A., Dukić, V., Govedar, Z., & Motta, R. (2012). Gap disturbances and regeneration patterns in a Bosnian old-growth forest: A multispectral remote sensing and ground-based approach. Annals of Forest Science, 69, 617–625. https://doi.org/10.1007/s13595-011-0177-9
Hobi, M. L., Ginzler, C., Commarmot, B., & Bugmann, H. (2015). Gap pattern of the largest primeval beech forest of Europe revealed by remote sensing. Ecosphere, 6, art76. https://doi.org/10.1890/es14-00390.1
Espírito-Santo, F. D. B., Keller, M. M., Linder, E., Oliveira Junior, R. C., Pereira, C., & Oliveira, C. G. (2014). Gap formation and carbon cycling in the Brazilian Amazon: Measurement using high-resolution optical remote sensing and studies in large forest plots. Plant Ecology & Diversity, 7, 305–318. https://doi.org/10.1080/17550874.2013.795629
Malahlela, O., Cho, M. A., & Mutanga, O. (2014). Mapping canopy gaps in an indigenous subtropical coastal forest using high-resolution WorldView-2 data. International Journal of Remote Sensing, 35, 6397–6417. https://doi.org/10.1080/01431161.2014.954061
Pilaš, I., Gašparović, M., Novkinić, A., & Klobučar, D. (2020). Mapping of the canopy openings in mixed beech–fir forest at Sentinel-2 subpixel level using UAV and machine learning approach. Remote Sensing, 12, 3925. https://doi.org/10.3390/rs12233925
Pithon, S., Jubelin, G., Guitet, S., & Gond, V. (2013). A statistical method for detecting logging-related canopy gaps using high-resolution optical remote sensing. International Journal of Remote Sensing, 34, 700–711. https://doi.org/10.1080/01431161.2012.706719
Zielewska-Büttner, K., Adler, P., Ehmann, M., & Braunisch, V. (2016). Automated detection of forest gaps in spruce dominated stands using canopy height models derived from stereo aerial imagery. Remote Sensing, 8, 175. https://doi.org/10.3390/rs8030175
Azizi, Z., Najafi, A., & Sohrabi, H. (2014). Forest canopy density estimating using satellite images, vol 37. Proceedings of 21st International Society for Photogrammetry and Remote Sensing (ISPRS) Congress, Part B8. Beijing, (vol. 37, pp. 1127–1130).
Mahboob, J., & Iqbal, F. (2012). Forest crown closure assessment using multispectral satellite imagery. African Journal of Agricultural Research, 7, 5033–5042. https://doi.org/10.5897/AJAR11.1937#sthash.SacyvMVU.dpuf
Negron-Juarez, R. I., Chambers, J. Q., Marra, D. M., Ribeiro, G. H. P. M., Rifai, S. W., Higuchi, N., & Roberts, D. (2011). Detection of subpixel treefall gaps with Landsat imagery in Central Amazon forests. Remote Sensing Envionment, 115, 3322–3328.
Numbisi, F. N., & Van Coillie, F. (2020). Does Sentinel-1A backscatter capture the spatial variability in canopy gaps of tropical agroforests? A proof-of-concept in cocoa landscapes in Cameroon. Remote Sensing, 12, 4163.
Dubayah, R.; Sheldon, S.; Clark, D.; Hofton, M.; Blair, J.; Hurtt, G.; Chazdon, R.L. Estimation of tropical forest height and biomass dynamics using lidar remote sensing at La Selva, Costa Rica. J. Geophys. Res. Biogeosciences 2010, 115.
Chen, G., Hay, G. J., & St-Onge, B. (2012). A GEOBIA framework to estimate forest parameters from lidar transects, Quickbird imagery and machine learning: A case study in Quebec, Canada. International Journal of Applied Earth Observation and Geoinformation, 15, 28–37. https://doi.org/10.1016/j.jag.2011.05.010
Lefsky, M. A., Cohen, W. B., Harding, D. J., Parker, G. G., Acker, S. A., & Gower, S. T. (2002). Lidar remote sensing of above-ground biomass in three biomes. Global Ecology and Biogeography, 11, 393–399. https://doi.org/10.1046/j.1466-822x.2002.00303.x
Matasci, G., Hermosilla, T., Wulder, M. A., White, J. C., Coops, N. C., Hobart, G. W., & Zald, H. S. J. (2018). Large-area mapping of Canadian boreal forest cover, height, biomass and other structural attributes using Landsat composites and lidar plots. Remote Sensing of Environment, 209, 90–106. https://doi.org/10.1016/j.rse.2017.12.020
Schardt, M., Granica, K., Hirschmugl, M., Deutscher, J., Mollatz, M., Steinegger, M., ... & Linser, S. (2015). The assessment of forest parameters by combined LiDAR and satellite data over alpine regions - EUFODOS implementation in Austria. Journal of the National Cancer Center Forest Research Institute Zvolen, 61, 3–11. https://doi.org/10.1515/forj-2015-0008
Fassnacht, F. E., Mangold, D., Schäfer, J., Immitzer, M., Kattenborn, T., Koch, B., & Latifi, H. (2017). Estimating stand density, biomass and tree species from very high resolution stereo-imagery – Towards an all-in-one sensor for forestry applications? Forestry, 1–19. https://doi.org/10.1093/forestry/cpx014
Maack, J., Kattenborn, T., Fassnacht, F. E., Enßle, F., Hernández, J., Corvalán, P., & Koch, B. (2015). Modeling forest biomass using very-high-resolution data—Combining textural, spectral and photogrammetric predictors derived from spaceborne stereo images. European Journal of Remote Sensing, 48, 245–261. https://doi.org/10.5721/EuJRS20154814
Vastaranta, M., Yu, X., Luoma, V., Karjalainen, M., Saarinen, N., Wulder, M. A., White, J. C., Persson, H. J., Hollaus, M., Yrttimaa, T., et al. (2018). Aboveground forest biomass derived using multiple dates of WorldView-2 stereo-imagery: Quantifying the improvement in estimation accuracy. International Journal of Remote Sensing, 39, 8766–8783. https://doi.org/10.1080/01431161.2018.1492176
Hame, T., Rauste, Y., Antropov, O., Ahola, H. A., & Kilpi, J. (2013). Improved mapping of tropical forests with optical and SAR imagery, Part II: Above ground biomass estimation. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 6, 92–101. https://doi.org/10.1109/JSTARS.2013.2241020
Harris, N. L., Gibbs, D. A., Baccini, A., Birdsey, R. A., de Bruin, S., Farina, M., Fatoyinbo, L., Hansen, M. C., Herold, M., Houghton, R. A., et al. (2021). Global maps of twenty-first century forest carbon fluxes. Nature Climate Change, 11, 234–240. https://doi.org/10.1038/s41558-020-00976-6
Chowdhury, T. A., Thiel, C., Schmullius, C., & Stelmaszczuk-Grska, M. (2013). Polarimetric parameters for growing stock volume estimation using ALOS PALSAR L-band data over Siberian forests. Remote Sensing, 5, 5725–5756. https://doi.org/10.3390/rs5115725
Fransson, J. E. S., Smith, G., Walter, F., Gustavsson, A., & Ulander, L. M. H. (2004). Estimation of forest stem volume in sloping terrain using CARABAS-II VHF SAR data. Canadian Journal of Remote Sensing, 30, 651–660. https://doi.org/10.5589/m04-026
Gama, F. F., Dos Santos, J. R., & Mura, J. C. (2010). Eucalyptus biomass and volume estimation using interferometric and polarimetric SAR data. Remote Sensing, 2, 939–956. https://doi.org/10.3390/rs2040939
Melon, P., Martinez, J. M., Le Toan, T., Ulander, L. M. H., & Beaudoin, A. (2001). On the retrieving of forest stem volume from VHF SAR data: Observation and modeling. IEEE Transactions on Geoscience and Remote Sensing, 39, 2364–2372. https://doi.org/10.1109/36.964972
Santi, E., Chiesi, M., Fontanelli, G., Lapini, A., Paloscia, S., Pettinato, S., Ramat, G., & Santurri, L. (2021). Mapping woody volume of Mediterranean forests by using SAR and machine learning: A case study in Central Italy. Remote Sensing, 13, 809. https://doi.org/10.3390/rs13040809
Tanase, M. A., Marin, G., Belenguer-Plomer, M. A., Borlaf, I., Popescu, F., & Badea, O. (2020). Deep neural networks for forest growing stock volume retrieval: A comparative analysis for l-band sar data. In IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium (pp. 4975–4978). IEEE.
Thiel, C., & Schmullius, C. (2014). Impact of tree species on magnitude of PALSAR interferometric coherence over Siberian forest at frozen and unfrozen conditions. Remote Sensing, 6, 1124–1136. https://doi.org/10.3390/rs6021124
Thiel, C., Thiel, C., & Schmullius, C. (2009). Operational large-area forest monitoring in Siberia using ALOS PALSAR summer intensities and winter coherence. IEEE Transactions on Geoscience and Remote Sensing, 47, 3993–4000.
Dees, M., Straub, C., & Koch, B. (2012). Can Biodiversity study benefit from information on the vertical structure of forests? Utility of LiDAR remote sensing. Current Science, 102, 1181–1187.
Hirschmugl, M., Bronner, G., Cepirlo, N., Berger, V., Kirchmair, H., & Schardt, M. (2019). Assessment of vertical structure from ALS data in natural forests. In Proceedings of the Proceedings of SILVILASER 2019; Iguazu Falls.
Kwon, S.-K., Jung, H.-S., Baek, W.-K., & Kim, D. (2017). Classification of forest vertical structure in South Korea from aerial orthophoto and lidar data using an artificial neural network. Applied Sciences, 7, 1046. https://doi.org/10.3390/app7101046
Latifi, H., Heurich, M., Hartig, F., Müller, J., Krzystek, P., Jehl, H., & Dech, S. (2016). Estimating over- and understorey canopy density of temperate mixed stands by airborne LiDAR data. Forestry, 89, 69–81. https://doi.org/10.1093/forestry/cpv032
Leiterer, R., Torabzadeh, H., Furrer, R., Schaepman, M. E., & Morsdorf, F. (2015). Towards automated characterization of canopy layering in mixed temperate forests using airborne laser scanning. Forests, 6, 4146–4167. https://doi.org/10.3390/f6114146
Park, S.-H., Jung, H.-S., Lee, S., & Kim, E.-S. (2021). Mapping forest vertical structure in Sogwang-ri forest from full-waveform lidar point clouds using deep neural network. Remote Sensing, 13, 3736.
Yu, J.-W., Yoon, Y.-W., Baek, W.-K., & Jung, H.-S. (2021). Forest vertical structure mapping using two-seasonal optic images and LiDAR DSM acquired from UAV platform through random forest, XGBoost, and support vector machine Approaches. Remote Sensing, 13, 4282.
Zimble, D. A., Evans, D. L., Carlson, G. C., Parker, R. C., Grado, S. C., & Gerard, P. D. (2003). Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sensing of Environment, 87, 171–182. https://doi.org/10.1016/S0034-4257(03)00139-1
Crespo-Peremarch, P., Fournier, R. A., Nguyen, V. T., van Lier, O. R., & Ruiz, L. Á. (2020). A comparative assessment of the vertical distribution of forest components using full-waveform airborne, discrete airborne and discrete terrestrial laser scanning data. Forest Ecology and Management, 473, 118268. https://doi.org/10.1016/j.foreco.2020.118268
Hansen, M. J., Franklin, S. E., Woudsma, C., & Peterson, M. (2001). Forest structure classification in the North Columbia mountains using the Landsat TM Tasseled Cap wetness component. Canadian Journal of Remote Sensing, 27, 20–32. https://doi.org/10.1080/07038992.2001.10854916
Cohen, W. B., Spies, T. A., & Fiorella, M. (1995). Estimating the age and structure of forests in a multi-ownership landscape of Western Oregon, U.S.A. International Journal of Remote Sensing, 16, 721–746. https://doi.org/10.1080/01431169508954436
Nel, E. M., Wessman, C. A., & Veblen, T. T. (1994). Digital and visual analysis of thematic mapper imagery for differentiating old growth from younger spruce-fir stands. Remote Sensing of Environment, 48, 291–301. https://doi.org/10.1016/0034-4257(94)90003-5
Congalton, R. G., Green, K., & Teply, J. (1993). Mapping old growth forests on national forest and park lands in the Pacific Northwest from remotely sensed data. Photogrammetric Engineering and Remote Sensing, 59, 529–535.
Lee, Y.-S., Lee, S., & Jung, H.-S. (2020). Mapping forest vertical structure in Gong-Ju, Korea using Sentinel-2 satellite images and artificial neural networks. Applied Sciences, 10, 1666. https://doi.org/10.3390/app10051666
Lee, Y.-S., Lee, S., Baek, W.-K., Jung, H.-S., Park, S.-H., & Lee, M.-J. (2020). Mapping forest vertical structure in Jeju Island from optical and radar satellite images using artificial neural network. Remote Sensing, 12, 797. https://doi.org/10.3390/rs12050797
Morley, P. J., Donoghue, D. N. M., Chen, J.-C., & Jump, A. S. (2019). Quantifying structural diversity to better estimate change at mountain forest margins. Remote Sensing of Environment, 223, 291–306. https://doi.org/10.1016/j.rse.2019.01.027
Brigot, G., Simard, M., Colin-Koeniguer, E., & Boulch, A. (2019). Retrieval of forest vertical structure from PolInSAR data by machine learning using LIDAR-derived features. Remote Sensing, 11, 381. https://doi.org/10.3390/rs11040381
El Moussawi, I., Ho Tong Minh, D., Baghdadi, N., Abdallah, C., Jomaah, J., Strauss, O., ... & Ngo, Y. N. (2019). Monitoring tropical forest structure using SAR tomography at L-and P-band. Remote Sensing, 11(16), 1934. https://doi.org/10.3390/rs11161934
Minh, D. H. T., Le Toan, T., Rocca, F., Tebaldini, S., d’Alessandro, M. M., & Villard, L. (2014). Relating P-band synthetic aperture radar tomography to tropical forest biomass. IEEE Transactions on Geoscience and Remote Sensing, 52, 967–979.
Neumann, M., Ferro-Famil, L., & Reigber, A. (2010). Estimation of forest structure, ground, and canopy layer characteristics from multibaseline polarimetric interferometric SAR data. IEEE Transactions on Geoscience and Remote Sensing, 48, 1086–1104. https://doi.org/10.1109/TGRS.2009.2031101
Tello, M., Cazcarra-Bes, V., Pardini, M., & Papathanassiou, K. (2018). Forest structure characterization from SAR tomography at L-band. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 11, 3402–3414. https://doi.org/10.1109/JSTARS.2018.2859050
Zhang, Y., He, C., Xu, X., & Chen, D. (2016). Forest vertical parameter estimation using PolInSAR imagery based on radiometric correction. ISPRS International Journal of Geo-Information, 5, 186.
Axelsson, A., Lindberg, E., & Olsson, H. (2018). Exploring multispectral ALS data for tree species classification. Remote Sensing, 10, 183. https://doi.org/10.3390/rs10020183
Brandtberg, T., Warner, T. A., Landenberger, R. E., & McGraw, J. B. (2003). Detection and analysis of individual leaf-off tree crowns in small footprint, high sampling density lidar data from the eastern deciduous forest in North America. Remote Sensing of Environment, 85, 290–303. https://doi.org/10.1016/S0034-4257(03)00008-7
Donoghue, D. N. M., Watt, P. J., Cox, N. J., & Wilson, J. (2007). Remote sensing of species mixtures in coniferous plantations using LiDAR height and intensity data. Remote Sensing of Environment, 110, 509–522.
Ghosh, A., Fassnacht, F. E., Joshi, P. K., & Koch, B. (2014). A framework for mapping tree species combining hyperspectral and LiDAR data: Role of selected classifiers and sensor across three spatial scales. International Journal of Applied Earth Observation and Geoinformation, 26, 49–63. https://doi.org/10.1016/j.jag.2013.05.017
Heinzel, J., & Koch, B. (2011). Exploring full-waveform LiDAR parameters for tree species classification. International Journal of Applied Earth Observation and Geoinformation, 13, 152–160. https://doi.org/10.1016/j.jag.2010.09.010
Holmgren, J. (2004). Persson, \textbackslashAA Identifying species of individual trees using airborne laser scanner. Remote Sensing of Environment, 90, 415–423.
Ballanti, L., Blesius, L., Hines, E., & Kruse, B. (2016). Tree species classification using hyperspectral imagery: A comparison of two classifiers. Remote Sensing, 8, 445. https://doi.org/10.3390/rs8060445
Leckie, D. G., Tinis, S., Nelson, T., Burnett, C., Gougeon, F. A., Cloney, E., & Paradine, D. (2005). Issues in species classification of trees in old growth conifer stands. Canadian Journal of Remote Sensing, 31, 175–190.
Bohlin, J., Olsson, H., Olofsson, K., & Wallerman, J. (2006). Tree species discrimination by aid of template matching applied to digital air photos. In Proceedings of the Proceedings of Workshop on 3D Remote Sensing in Forestry; Koukal, T., Schneider, W., Eds.; Vienna, pp. 199–203.
Cross, M., Scambos, T., Pacifici, F., Vargas-Ramirez, O., Moreno-Sanchez, R., & Marshall, W. (2019). Classification of tropical forest tree species using meter-scale image data. Remote Sensing, 11. https://doi.org/10.3390/rs11121411
Dalponte, M., Bruzzone, L., & Gianelle, D. (2012). Tree species classification in the Southern Alps based on the fusion of very high geometrical resolution multispectral/hyperspectral images and LiDAR data. Remote Sensing of Environment, 123, 258–270. https://doi.org/10.1016/j.rse.2012.03.013
Erikson, M. (2004). Species classification of individually segmented tree crowns in high-resolution aerial images using radiometric and morphologic image measures. Remote Sensing of Environment, 91, 469–477.
Fassnacht, F. E., Latifi, H., Stereńczak, K., Modzelewska, A., Lefsky, M., Waser, L. T., Straub, C., & Ghosh, A. (2016). Review of studies on tree species classification from remotely sensed data. Remote Sensing of Environment, 186, 64–87.
Franklin, S. E., Hall, R. J., Moskal, L. M., Maudie, A. J., & Lavigne, M. B. (2000). Incorporating texture into classification of forest species composition from airborne multispectral images, 21, 61–79.
Guo, Y., Li, Z., Chen, E., Zhang, X., Zhao, L., Xu, E., Hou, Y., & Sun, R. (2020). An end-to-end deep fusion model for mapping forests at tree species levels with high spatial resolution satellite imagery. Remote Sensing, 12, 3324. https://doi.org/10.3390/rs12203324
Immitzer, M., Böck, S., Einzmann, K., Vuolo, F., Pinnel, N., Wallner, A., & Atzberger, C. (2018). Fractional cover mapping of spruce and pine at 1 ha resolution combining very high and medium spatial resolution satellite imagery. Remote Sensing of Environment.
Lelong, C. C., Tshingomba, U. K., & Soti, V. (2020). Assessing Worldview-3 multispectral imaging abilities to map the tree diversity in semi-arid parklands. International Journal of Applied Earth Observation and Geoinformation, 93, 102211. https://doi.org/10.1016/j.jag.2020.102211
Grabska, E., Hostert, P., Pflugmacher, D., & Ostapowicz, K. (2019). Forest stand species mapping using the Sentinel-2 time series. Remote Sensing, 11, 1197. https://doi.org/10.3390/rs11101197
Hoscilo, A., & Lewandowska, A. (2019). Mapping forest type and tree species on a regional scale using multi-temporal Sentinel-2 data. Remote Sensing, 11. https://doi.org/10.3390/rs11080929
Immitzer, M., Neuwirth, M., Böck, S., Brenner, H., Vuolo, F., & Atzberger, C. (2019). Optimal input features for tree species classification in Central Europe based on multi-temporal Sentinel-2 data. Remote Sensing, 11, 2599.
Immitzer, M., Vuolo, F., Einzmann, K., Atzberger, C. (Eds.) (2016). Verwendung von Multispektralen Sentinel-2 Daten Fr Die Baumartenklassifikation Und Vergleich Mit Anderen Satellitensensoren. Publikationen der DGPF: Dreilndertagung der DGPF, der OVG und der SGPF in Bern, Schweiz, Vol. Band 25.
Persson, Å. J. U. H., Holmgren, J., Söderman, U., & Olsson, H. (2004). Tree species classification of individual trees in Sweden by combining high resolution laser data with high resolution near-infrared digital images. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 36(8), pp. 204–207.
Wessel, M., Brandmeier, M., & Tiede, D. (2018). Evaluation of different machine learning algorithms for scalable classification of tree types and tree species based on Sentinel-2 data. Remote Sensing, 10, 1419. https://doi.org/10.3390/rs10091419
Udali, A., Lingua, E., & Persson, H. J. (2021). Assessing forest type and tree species classification using Sentinel-1 C-band SAR data in Southern Sweden. Remote Sensing, 13, 3237. https://doi.org/10.3390/rs13163237
Heurich, M., Schneider, T., & Kennel, E. (2003, September). Laser scanning for identification of forest structures in the Bavarian forest national park. In Proceedings of the Scandlaser Scientific Workshop on Airborne Laser Scanning of Forests, pp. 98–107.
Latifi, H., Fassnacht, F. E., Müller, J., Tharani, A., Dech, S., & Heurich, M. (2015). Forest inventories by LiDAR data: A comparison of single tree segmentation and metric-based methods for inventories of a heterogeneous temperate forest. International Journal of Applied Earth Observation and Geoinformation, 42, 162–174. https://doi.org/10.1016/j.jag.2015.06.008
Yao, W., & Wei, Y. (2013). Detection of 3-D individual trees in urban areas by combining airborne LiDAR data and imagery. IEEE Geoscience and Remote Sensing Letters, 10, 1355–1359. https://doi.org/10.1109/LGRS.2013.2241390
Brandt, J. S., Kuemmerle, T., Li, H., Ren, G., Zhu, J., & Radeloff, V. C. (2012). Using Landsat imagery to map forest change in southwest China in response to the national logging ban and ecotourism development. Remote Sensing of Environment, 121, 358–369. https://doi.org/10.1016/j.rse.2012.02.010
Loboda, T. V., Zhang, Z., O’Neal, K. J., Sun, G., Csiszar, I. A., Shugart, H. H., & Sherman, N. J. (2012). Reconstructing disturbance history using satellite-based assessment of the distribution of land cover in the Russian Far East. Remote Sensing of Environment, 118, 241–248. https://doi.org/10.1016/j.rse.2011.11.022
Hologa, R., Scheffczyk, K., Dreiser, C., & Gärtner, S. (2021). Tree species classification in a temperate mixed mountain forest landscape using random forest and multiple datasets. Remote Sensing, 13, 4657. https://doi.org/10.3390/rs13224657
Modzelewska, A., Fassnacht, F. E., & Stereńczak, K. (2020). Tree species identification within an extensive forest area with diverse management regimes using airborne hyperspectral data. International Journal of Applied Earth Observation and Geoinformation, 84, 101960. https://doi.org/10.1016/j.jag.2019.101960
Shi, Y., Wang, T., Skidmore, A. K., & Heurich, M. (2020). Improving LiDAR-based tree species mapping in Central European mixed forests using multi-temporal digital aerial colour-infrared photographs. International Journal of Applied Earth Observation and Geoinformation, 84, 101970. https://doi.org/10.1016/j.jag.2019.101970
Schulze, K., Malek, Ž, & Verburg, P. H. (2019). Towards better mapping of forest management patterns: A global allocation approach. Forest Ecology and Management, 432, 776–785. https://doi.org/10.1016/j.foreco.2018.10.001
Hudson, L. N., Newbold, T., Contu, S., Hill, S. L., Lysenko, I., De Palma, A., Phillips, H. R., Senior, R. A., Bennett, D. J., & Booth, H. (2014). The PREDICTS database: A global database of how local terrestrial biodiversity responds to human impacts. Ecology and Evolution, 4, 4701–4735.
Munteanu, C., Senf, C., Nita, M. D., Sabatini, F. M., Oeser, J., Seidl, R., & Kuemmerle, T. (2022). Using historical spy satellite photographs and recent remote sensing data to identify high‐conservation‐value forests. Conservation Biology, 36(2), e13820. https://doi.org/10.1111/cobi.13820
Nita, M. D., Munteanu, C., Gutman, G., Abrudan, I. V., & Radeloff, V. C. (2018). Widespread forest cutting in the aftermath of World War II captured by broad-scale historical Corona spy satellite photography. Remote Sensing of Environment, 204, 322–332. https://doi.org/10.1016/j.rse.2017.10.021
Senf, C., & Seidl, R. (2020). Mapping the forest disturbance regimes of Europe. Nature Sustainability, 4, 63–70. https://doi.org/10.1038/s41893-020-00609-y
Sabatini, F. M., Keeton, W. S., Lindner, M., Svoboda, M., Verkerk, P. J., Bauhus, J., Bruelheide, H., Burrascano, S., Debaive, N., Duarte, I., et al. (2020). Protection gaps and restoration opportunities for primary forests in Europe. Diversity and Distributions, 26, 1646–1662. https://doi.org/10.1111/ddi.13158
Fiorella, M., & Ripple, W. J. (1995). Determining successional stage of temperate coniferous forests with Landsat satellite data. Geographic Information Analysis: An Ecological Approach for the Management of Wildlife on the Forest Landscape.
Jiang, H., Strittholt, J. R., Frost, P. A., & Slosser, N. C. (2004). The classification of late seral forests in the Pacific Northwest, USA using Landsat ETM+ imagery. Remote Sensing of Environment, 91, 320–331. https://doi.org/10.1016/j.rse.2004.03.016
Falkowski, M. J., Evans, J. S., Martinuzzi, S., Gessler, P. E., & Hudak, A. T. (2009). Characterizing forest succession with lidar data: An evaluation for the Inland Northwest, USA. Remote Sensing of Environment, 113, 946–956. https://doi.org/10.1016/j.rse.2009.01.003
Kane, V. R., Bakker, J. D., McGaughey, R. J., Lutz, J. A., Gersonde, R. F., & Franklin, J. F. (2010). Examining conifer canopy structural complexity across forest ages and elevations with LiDAR data. Canadian Journal of Forest Research, 40, 774–787. https://doi.org/10.1139/X10-064
Kathmann, F., Ciutea, A., Biris, I. A., Ibisch, P. L., & Salageanu, V. (2017). Potential primary forests map of Romania. Buchar. Greenpeace. Retrieved May 12, 2023. https://www.greenpeace.org/static/planet4-romania-stateless/2019/07/f16ecbe6-f16ecbe6-potential_primary_forests_map_of_romania_low_res.pdf
Albrich, K., Thom, D., Rammer, W., & Seidl, R. (2021). The long way back: Development of Central European mountain forests towards old‐growth conditions after cessation of management. Journal of Vegetation Science, 32. https://doi.org/10.1111/jvs.13052
Funding
Open access funding provided by JOANNEUM RESEARCH Forschungsgesellschaft mbH. This manuscript was written within the framework of “LIFE PROGNOSES - LIFE PRotection of Old Growth Forests in Europe: Natural heritage, Outline, Synthesis and Ecosystem Services” project funded by the LIFE Programme of the European Commission under Grant Agreement “LIFE20 PRE/BE/0000111 – LIFE PROGNOSES.”
Author information
Authors and Affiliations
Contributions
C.S. and M.H. wrote the main manuscript text. C.S. prepared Fig. 1; M.H. prepared Fig. 2. The tables were produced jointly by C.S., M.H., A.D., V.B., H.K., and K.V. Further, K.V. wrote large parts of the introduction. K.V., H.K., and V.B. wrote main parts of Sect. 4. All authors reviewed the manuscript several times. The authors would like to appreciate the anonymous reviewers’ comments, which helped to improve the manuscript.
Corresponding author
Ethics declarations
Ethics Approval
Not applicable.
Consent to Participate
Not applicable.
Consent for Publication
Not applicable.
Conflict of Interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hirschmugl, M., Sobe, C., Di Filippo, A. et al. Review on the Possibilities of Mapping Old-Growth Temperate Forests by Remote Sensing in Europe. Environ Model Assess 28, 761–785 (2023). https://doi.org/10.1007/s10666-023-09897-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10666-023-09897-y