
Abstract
We are concerned with stability of numerical methods for delay differential systems of neutral type. In particular, delay-dependent stability of numerical methods is investigated. By means of the H-matrix norm, a necessary and sufficient condition for the asymptotic stability of analytic solution of linear neutral differential systems is derived. Then, based on the argument principle, sufficient conditions for delay-dependent stability of Runge–Kutta and linear multi-step methods are presented, respectively. Furthermore, two algorithms are provided for checking delay-dependent stability of analytical and numerical solutions, respectively. Numerical examples are given to illustrate the main results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
We are concerned with linear delay differential system of neutral type with a single delay described by
with the condition
where \(u(t)\in \mathbb {R}^{d},\) parameter matrices \(L, M, N\in \mathbb {R}^{d\times d}\) and delay \(\tau >0.\) Throughout the present paper, the NDDE system refers to Eq. (1.1) with (1.2).
Stability of delay and neutral systems can be divided into two categories according to its dependence upon the size of delays. The stability which does not depend on delays is called delay-independent, otherwise it is referred to as delay-dependent (they are discussed in [1, 2, 4, 9,10,11, 19]). Each case is extended to the neutral type and the reader can refer to [2, 10] for the delay-independent and to [2, 9, 11, 19] for the delay-dependent case. Then, the stability of numerical methods is also divided into delay-independent and delay-dependent according to which system the method is applied to. The present paper is devoted to study the delay-dependent stability of numerical methods for the systems of neutral type, for we believe it gives more precise insight of the methods.
Although numerical delay-independent stability has been discussed in [1, 2, 10], only a few works have been reported for the delay-dependent case [2, 7, 13, 18]. The literature [2, 7, 18] proposed the delay-dependent stability of numerical methods for the system
and called it as D-stability. However, as pointed out in [2], delay-dependent stability of numerical methods for the system is a real challenge. In fact, in [18] it is proved that for any A-stable natural Runge–Kutta method for system (1.3) and for any step-size \(h={\tau }/{m}\) (m is a positive integer), there exists an asymptotically stable linear system of dimension \(d=4\) for which \( u_{n}\rightarrow 0 \quad \text{ as }\quad n\rightarrow \infty \) does not hold. Later, the same negative result for \(d=2\) is obtained in [7]. In short, no A-stable natural Runge–Kutta method for system (1.3) is D-stable.
This suggests that the definition of D-stability is too restricted. Its definition requires the resulting difference system from a Runge–Kutta method is asymptotically stable for all asymptotically stable system (1.3) and for all the step-sizes. Hence almost all the standard Runge–Kutta methods are excluded in the D-stability sense. However, practical computations shows it is not the case. Our experiences are as follows. When we numerically solve an asymptotically stable NDDE system, it is possible that by carefully choosing a small step-size \(h={\tau }/{m}\) numerical solutions by a standard Runge–Kutta or linear multi-step method exhibit an asymptotically stable behaviour. Thus we are motivated to present a relaxed definition for delay-dependent stability of numerical methods. We will give a new definition of delay-dependent stability, which only requires the conditions of asymptotically stable difference system derived from a numerical method for an asymptotically stable NDDE system with a certain integer giving the step-size \(h={\tau }/{m}\).
This paper is organized as follows. A necessary and sufficient condition for the asymptotic stability of analytic solution of linear neutral differential systems is derived in Sect. 2. In Sect. 3, the new delay-dependent stability of Runge–Kutta and linear multi-step methods are discussed, respectively. Numerical examples in Sect. 4 are provided to illustrate the main results. Conclusions are given in Sect. 5.
Throughout the paper, for a complex matrix F, \(\Vert F \Vert \) means any matrix norm. The Hermitian conjugate of a complex vector or matrix is denoted by \(\varvec{x}^{*}\) or \(F^{*}\). The \(j^{\text {th}}\) eigenvalue of F is denoted by \(\lambda _{j}(F)\). The symbol \(\rho (F)\) represents its spectral radius. \(\mathrm{Re}\,z\) and \(\mathrm{Im}\,z\) stand for the real and the imaginary parts of a complex number z, respectively. The open left half-plane \(\{s: \mathrm{Re}\,s<0\}\) is denoted by \(\mathbb {C}^{-}\) and the right half-plane \(\{s: \mathrm{Re}\,s\ge 0\}\) by \(\mathbb {C}^{+}\).
2 Preliminaries
In this section, several lemmas and definitions are reviewed which will be used in Sects. 3 and 4.
A function P(s) is said to be meromorphic in a domain D if it is analytic throughout D except poles. The following argument principle is well-known.
Lemma 2.1
(e.g. [5]) Suppose that
-
(i)
a function P(s) is meromorphic in the domain interior to a positively oriented simple closed contour \(\gamma ;\)
-
(ii)
P(s) is analytic and nonzero on \(\gamma ;\)
-
(iii)
counting multiplicities, Z is the number of zeros and Y is the number of poles of P(s) inside \(\gamma .\)
Then
where \(\triangle _{\gamma }\arg P(s)\) represents the change of the argument of P(s) along \(\gamma \).
The following result is useful to check the existence of inverse matrix.
Lemma 2.2
(e.g. [17]) For a complex matrix F, if \(\rho (F)<1,\) then the matrix \((I-F)^{-1}\) exists and
Now we review the H-matrix norm based on Stein Eq. [12].
Definition 2.1
(e.g. [17]) A matrix \(F\in \mathbb {C}^{d \times d}\) is said to be stable with respect to the unit circle if all its eigenvalues \(\lambda _{i}(F)\ (1\le i\le d)\) lie inside the unit circle, that is, \(|\lambda _{i}(F)|<1\) holds for all \(1\le i\le d\).
Lemma 2.3
(e.g. [17]) Assume \(F, V\in \mathbb {C}^{d \times d}\) and furthermore V be positive definite. The matrix F is stable with respect to the unit circle, if and only if there exists a positive definite matrix H satisfying Stein equation
Furthermore, the matrix Eq. (2.1) has a unique solution H if and only if \(\lambda _i(F^{*})\cdot \lambda _j(F) \ne 1\) holds for all possible indices i and j.
Then, the Lemma guarantees the unique existence of H in our case of Lemma 2.3, for we assume a stable matrix F with respect to the unit circle. Furthermore, we note that the matrix H is computable in our case and computing algorithms have been developed (e.g. [6]). In fact, the software Matlab has the functions slstst (for stable Stein equations) and slgest (for generalized Stein equations) ([3]). Thus an introduction of H-norm by the following definition is meaningful in conjunction with the stable matrix with respect to the unit circle.
Definition 2.2
(e.g. [12]) For any vector \(\varvec{x}\), any matrix F and any positive definite matrix H, the H-norm of \(\varvec{x}\) and F are defined, respectively, by
By the above definition, we have the following formula for estimating the H-norm of F.
Lemma 2.4
For any matrix \(F\in \mathbb {C}^{d \times d}\) and any positive definite matrix H, we introduce the positive Cholesky decomposition of H as \(H_{0}=\sqrt{H}\) and put \(\tilde{F}=H_{0}F{H_{0}}^{-1}\). Then we have
where \(\lambda _{\max }(W)\) stands for the maximal eigenvalue of a symmetric matrix W.
Proof
By Definition 2.2, we can calculate
which is the desired result. \(\square \)
For a stable matrix, the following Lemma asserts an evaluation of its H-norm by \(\rho (H)\).
Lemma 2.5
[12] If a matrix \(F\in \mathbb {C}^{d \times d}\) is stable, then there exists a unique positive definite matrix H which satisfies the following Stein equation
and the equality
holds.
Proof
Because of the condition \(\rho (F)<1\), Lemma 2.3 gives the positive definite matrix H satisfying the equation \(F^{*}HF-H=-I\). Then, by virtue of Definition 2.2 we can obtain
which implies the assertion of (2.5). \(\square \)
3 Stability criterion
In this section, by means of the H-matrix norm, a necessary and sufficient condition for asymptotic stability of the NDDE system is presented to extend the results in [11]. We will consider the stability of the system (1.1). Its characteristic equation reads
whose root is called a characteristic root. The asymptotic stability of the NDDE system is determined by the location of the characteristic roots. That is, the system is asymptotically stable if and only if all the characteristic roots lie in the open left complex half-plane \(\mathbb {C}^-\) [9].
If there exists unstable characteristic roots of (3.1), i.e., \(P(s)=0\) for \(\mathrm{Re}\,s\ge 0\), they are bounded due to the following result.
Theorem 3.1
Assume that condition \(\rho (N)<1\) holds. Let s be an unstable characteristic root of Eq. (3.1) of system (1.1), i.e., \(\mathrm{Re}\,s\ge 0\), then there exists a positive definite matrix H, satisfying Stein equation \(H - N^{*} H N = I\), which gives the bound of s as
Remark 3.1
Taking Lemmata 2.3, 2.4 and 2.5 into consideration, we can calculate the H-norm of matrices L, M and N in the following manner. Put \(H_0 = \sqrt{H}\), \(\tilde{L}=H_{0}L{H_{0}}^{-1}\) and \(\tilde{M}=H_{0}M{H_{0}}^{-1}\), then we have
Proof of Theorem 3.1
Since N is a stable matrix, by means of Lemma 2.5, there is a positive definite matrix H giving \(\Vert N\Vert _H<1\). The matrix H is determined by the Stein equation. As we are discussing an unstable root, we assume \(\mathrm{Re}\,s \ge 0\) throughout the proof. Since the identity \(\lambda _{j}(N\exp (-\tau s))=\exp (-\tau s)\lambda _{j}(N)\) is obvious for \(j=1, \ldots , d\), we can estimate as
Hence we have \(\rho (N\exp (-\tau s)) \le \rho (N)<1\), which assures the existence of \((I-N\exp (-\tau s))^{-1}\) by Lemma 2.2. Introduction of
rewrites P(s) as
Since \(\rho (N\exp (-\tau s)) < 1\), the equation
must hold. This implies the s is an eigenvalue of the matrix W(s) and there exists an integer \(j\ (1\le j\le d)\) such that
Since \(\mathrm{Re}\,s\ge 0,\) we have
According to (3.5) and (3.6), we can estimate
Thus the proof is completed. \(\square \)
The theorem means that there is a bounded region in the right-half complex plane \(\mathbb {C}^+\) which includes all the unstable characteristic roots of (3.1).
Remark 3.2
Since \(\rho (N)\le \Vert N\Vert \) holds generally, the condition \(\rho (N)< 1\) in Theorem 3.1 is weaker than the condition \( \Vert N\Vert < 1\) in [11]. Hence the theorem is an extension of the results in [11].
Definition 3.1
Assume that the conditions of Theorem 3.1 hold and the bound \(\beta \) is obtained. The half-disk \(D_{\beta }\) in s-plane is the closed set given by
Moreover, the boundary of \(D_{\beta }\) is denoted by \(\varGamma _{\beta }\). See Fig.1, where \(d_{1}=i\beta ,d_{2}=-i\beta .\)

Set \(D_{\beta }\)
By means of the argument principle, a computable criterion for system (1.1) can be derived. Now we present the main result in this section. The following theorem will exclude all the unstable characteristic root of Eq. (3.1) from the set \( D_{\beta }\).
Theorem 3.2
Assume that the conditions of Theorem 3.1 hold and the bound \(\beta \) is obtained. Then the system (1.1) is asymptotically stable if and only if the two conditions
and
hold, where P(s) is defined by (3.1) and \(\triangle _{\varGamma _{\beta }}\arg P(s)\) has the same meaning in Lemma 2.1. See Fig. 1.
Proof
Suppose the system is asymptotically stable. All zeros of P(s) are located on the left half plane \(\mathbb {C}^-\). It means that \(P(s)\ne 0\) when \(\mathrm{Re}\,s\ge 0\). By the argument principle, we have that (3.7) and (3.8) hold.
Conversely, assume that the conditions (3.7) and (3.8) hold. According to Theorem 3.1, it means that P(s) never vanishes for \(\mathrm{Re}\,s\ge 0\). Hence (3.7) and (3.8) imply the system (1.1) is asymptotically stable. Thus the proof completes. \(\square \)
Now we describe an algorithm to check the stability due to Theorem 3.2.
Algorithm 1
- Step 0:
-
Solve Stein equation
$$\begin{aligned} H - N^{*} H N = I \end{aligned}$$and obtain the positive definite matrix H. Put \(H_0 = \sqrt{H}\), \(\tilde{L}=H_{0}L{H_{0}}^{-1}\) and \(\tilde{M}=H_{0}M{H_{0}}^{-1}\), and calculate
$$\begin{aligned} \qquad \Vert L\Vert _H=\sqrt{\lambda _{\max }(\tilde{L}^{*}\tilde{L})},\quad \Vert M\Vert _H=\sqrt{\lambda _{\max }(\tilde{M}^{*}\tilde{M})},\quad \Vert N\Vert _H=\sqrt{1-\frac{1}{\rho (H)}}\ \end{aligned}$$and
$$\begin{aligned} \beta \mathop {=}\limits ^\mathrm{def}\frac{||L||_H+||M||_H}{1-||N||_H}. \end{aligned}$$Then as the boundary of \(D_{\beta }\) we have the curve \(\varGamma _{\beta }\), which consists of two parts, i.e., the segment \(\{ s = i t;\ -\beta \le t \le \beta \}\) and the half-circle \(\{ s;\ | s | = \beta \ \text{ and }\ -\pi /2 \le \mathrm{arg}\, s \le \pi /2 \}\).
- Step 1:
-
Take a sufficiently large integer \(n \in \mathbb {N}\) and distribute n node points \(\{ s_{j} \}\ (j = 1, 2, \ldots , n)\) on \(\varGamma _{\beta }\) as uniformly as possible. For each \(s_{j}\), we evaluate \(P(s_{j})\) by computing the determinant as
$$\begin{aligned} P(s_j) = \det \left[ s_{j}I - L - M\exp \left( -\tau s_{j}\right) - s_{j}N\exp \left( -\tau s_{j}\right) \right] . \end{aligned}$$Also we decompose \(P(s_j)\) into its real and imaginary parts.
- Step 2:
-
We examine whether \(P(s_{j})=0\) holds for each \(s_j\) (\(j =1, \ldots , n\)) by checking its magnitude satisfies \(| P(s_{j}) |\le \delta _{1}\) with the preassigned tolerance \(\delta _{1}\). If it holds, i.e., \(s_{j}\in \varGamma _{\beta }\) is a root of P(s), then the NDDE system is not asymptotically stable and stop the algorithm. Otherwise, to go to the next step.
- Step 3:
-
We examine whether \(\triangle _{\varGamma _{\beta }}\arg P(s)=0\) holds along the sequence \(\{ P(s_{j}) \}\) by checking \(|\triangle _{\varGamma _{\beta }}\arg P(s)| \le \delta _{2}\) with the preassigned tolerance \(\delta _{2}\). If it holds, it means that the change of the argument is 0 along the sequence \(\{ P(s_{j}) \},\) then the system is asymptotically stable, otherwise not stable.
Remark 3.3
Algorithm 1 avoids a computation of the coefficients of the characteristic polynomial P(s). Instead it evaluates the determinant \(P(s_{\ell })\) through the elementary row (or column) operations which are relatively efficient ways [14].
4 Delay-dependent stability of numerical methods
In this section, a delay-dependent stability of both Runge–Kutta (RK) and linear multi-step (LM) methods for linear delay differential systems of neutral type is discussed. Based on the argument principle, sufficient conditions for delay-dependent stability of the numerical methods are presented.
First, we assume the numerical solution we are now discussing gives a sequence of approximate values \(\{ u_0, u_1, \ldots , u_n, \ldots \}\) of \(\{ u(t_0), u(t_1), \ldots , u(t_n), \ldots \}\) of (1.1) on certain equidistant step-values \(\{ t_n (= n h) \}\) with the step-size h. We introduce the following new definition of delay-dependent stability of numerical methods for system (1.1).
Definition 4.1
Assume that the NDDE system is asymptotically stable for given matrices L, M, N and a delay \(\tau \). A numerical method is called weakly delay-dependently stable for system (1.1) if there exists a positive integer m such that the step-size \(h={\tau }/{m}\) and the numerical solution \(u_{n}\) with h satisfies
for any initial function.
Remark 4.1
In [2, 7, 18], the definition of delay-dependent stability, which is called D-stability there, is too restricted since it requires for all asymptotically stable delay differential system (1.3) and for all the natural numbers m the resulting numerical solution is asymptotically stable. Therefore, almost all the standard RK methods are excluded in the D-stability sense. It is obvious that Definition 4.1 is weaker than D-stability in the literature.
4.1 Runge–Kutta case
For the initial value problem of ordinary differential equations (ODEs)
an s-stage (implicit) Runge–Kutta method for ODEs (4.1) is defined (e.g., [16]) by
with
We associate the s-square matrix A and the s-dimensional vector \(\varvec{b}\) as
We analyse RK method which is extended to apply to the NDDE system. Taking advantage of the constant step-size \(h = \tau /m\), we can employ the so-called natural Runge–Kutta scheme [1, 2] for (1.1) given by
and
where the symbol \(K_{\ell ,i}\) means the i-th stage value of the RK at the \(\ell \)-th step-point.
Lemma 4.1
The characteristic polynomial \(P_{RK}(z)\) of the linear difference system (4.4) and (4.5) is given by
where the s-dimensional vector \(\varvec{e}\) is defined by \(\varvec{e}=(1,1,\ldots ,1)^\mathrm{T}.\)
Proof
The difference system (4.4) and (4.5) can be expressed with the Kronecker product as follows:
where the (ds)-dimensional vector \(K_{n}\) means
Hence the dimension of the vector \(\displaystyle { \left[ \begin{array}{c} K_{n} \\ u_{n+1} \end{array}\right] }\) becomes \((s+1)d\).
Taking z-transform to (4.7) and introducing as \(\displaystyle { Z\left\{ \left[ \begin{array}{c} K_{n-m-1} \\ u_{n-m} \end{array}\right] \right\} }= V(z)\), we obtain that
Hence, the characteristic polynomial of difference system is given as desired. \(\square \)
For an explicit RK method, that is, the one with \(a_{ij} = 0\) for \(i \le j\), we have the following result.
Theorem 4.1
For an explicit RK method, assume that
-
(i)
the NDDE system is asymptotically stable for given matrices L, M, N and delay \(\tau \) (therefore, Theorem 3.2 holds);
-
(ii)
the RK method is of s-stage and natural with the step-size \(h={\tau }/{m}\);
-
(iii)
The characteristic polynomial \(P_{RK}(z)\) never vanishes on the unit circle \(\mu =\{z:|z|=1\}\) and its change of argument satisfies
$$\begin{aligned} \frac{1}{2\pi }\triangle _{\mu }\arg P_{RK}(z) = d(s+1)(m+1). \end{aligned}$$(4.8)
Then the RK method for the NDDE system is weakly delay-dependently stable.
Proof
The difference system (4.7) is asymptotically stable if and only if all the characteristic root of \(P_{RK}(z)=0\) lie in the inner of the unit circle. Notice that the coefficient matrix of the term \(z^{m+1}\) in \(P_{RK}(z)=0\) is
Since the Runge–Kutta method is explicit, \(\lambda _{i}(A)=0\) holds for \(i=1, \ldots , s.\) It means that all the eigenvalues of matrix \(h(A\bigotimes L)\) vanish because of
with \(i=1, \ldots , s\) and \(j=1, \ldots , d\). Thus that matrix \(I_{sd}-h(A\bigotimes L)\) is nonsingular by Lemma 2.2 and the matrix
is also nonsingular. Since the degree of \(P_{RK}(z)\) is \(d (s+1) (m+1)\), it has \(d (s+1) (m+1)\) roots in total by counting their multiplicity. By the argument principle, the condition (iii) implies that the condition \(|z| < 1\) holds for all the \(d (s+1) (m+1)\) roots of \(P_{RK}(z)=0\). The proof completes. \(\square \)
For an implicit RK method applied to the NDDE system, we derive the following result.
Theorem 4.2
For an implicit RK method, assume that
-
(i)
the conditions (i),(ii) and (iii) in Theorem 4.1 hold;
-
(ii)
the product \(h \lambda _i(A) \lambda _j(L)\) never equals to unity for all \(i\ (1 \le i \le s)\) and \(j\ (1 \le j \le d)\).
Then the RK method for the NDDE system is weakly delay-dependently stable.
Proof
The proof can be carried out similarly to that of Theorem 4.1. Notice that the condition (ii) ensures the matrix
is nonsingular since the matrix \(I_{sd}-h(A\bigotimes L)\) is nonsingular. Thus the degree of the polynomial \(P_{RK}(z)\) becomes \(d (s+1) (m+1)\). \(\square \)
4.2 Linear multi-step case
When applied to ODEs (4.1), a linear k-step method is given as follows (e.g., [16]):
where h stands for the step-size, \(\alpha _{j},\) \(\beta _{j}\) are the formula parameters satisfying \(\alpha _k = 1\) and \(|\alpha _0| + |\beta _0| \ne 0\). and \(f_j = f(t_j, y_j)\). As in the case of RK method, in order to apply the LM method to the delay differential systems of neutral type (1.1), we employ the step-size h of an integral fraction of \(\tau \), i.e., \(h={\tau }/{m}\) for a certain \(m \in \mathbb {N}\).
For the application to the linear system (1.1), we introduce the same reformulation given by [10]. That is, with an auxiliary variable v(t) the system (1.1) is rewritten as the simultaneous system:
and
Then, an application of the method (4.9) to (4.10) and (4.11) yields
and
This reformulation can ease the derivation of its characteristic polynomial.
Lemma 4.2
The characteristic polynomial of (4.12) and (4.13) is given by
Proof
Equation (4.12) derives
which, together with (4.12) and (4.13), leads
The above is the difference equation to be solved after eliminating v’s. Taking its Z-transform and putting \(Z\{u_{n-m}\}=U(z)\), we obtain
Hence, the characteristic polynomial is given as desired. \(\square \)
For delay-dependent stability of an LM method, we have the following result.
Theorem 4.3
Assume that
-
(i)
the NDDE system is asymptotically stable for given matrices L, M, N and delay \(\tau \);
-
(ii)
for the underlying LM method with the step-size \(h={\tau }/{m}\), the matrix \(\alpha _{k}I-h\beta _{k}L\) is nonsingular;
-
(iii)
the characteristic polynomial \(P_{LM}(z)\) never vanishes on the unit circle \(\mu =\{z:|z|=1\}\) and its change of argument satisfies
$$\begin{aligned} \frac{1}{2\pi }\triangle _{\mu }\arg P_{LM}(z)=d(k+m). \end{aligned}$$(4.16)
Then the LM method for the NDDE system is weakly delay-dependently stable.
Proof
The difference system (4.15) is asymptotically stable if and only if all the characteristic roots of \(P_{LM}(z)=0\) lie in the inside of the unit circle. Because of the condition (ii) the parameter matrix \(\alpha _{k}I-h\beta _{k}L\) of the term \(z^{m+k}\) in (4.14) is nonsingular. Therefore, we know that the degree of \(P_{LM}(z)\) is \(d(k+m)\). Hence \(P_{LM}(z)=0\) has \(d(k+m)\) roots. By means of the argument principle, the condition (iii) means that all the \(d(k+m)\) roots of \(P_{LM}(z)=0\) lie inside of the unit circle \(|z|=1\). \(\square \)
Remark 4.2
When LM methods are explicit, \(\beta _{k}=0,\) we have that \(\alpha _{k}I-h\beta _{k}L=I\) for \(\alpha _{k}=1,\) i.e., condition (ii) of Theorem 3.3 holds automatically.
Now we can describe an algorithm to check the conditions of Theorems 4.1, 4.2 and 4.3. This is parallel to Algorithm 1.
Algorithm 2
- Step 1:
-
Taking a sufficiently big \(n \in \mathbb {N}\), we compute n nodes \(\{ z_0, z_1, \ldots , z_{n-1} \}\) upon the unit circle \(\mu \) of z-plane so as \(\mathrm{arg}\, z_{\ell } = (2 \pi ) \ell /n\). For each \(z_{\ell }\ (\ell =0,1 \ldots n-1)\), we evaluate the characteristic polynomials of the numerical scheme. That is, in RK case, we evaluate it by computing the determinant
$$\begin{aligned} P(z_{\ell })= & {} \det \left\{ \left[ \begin{array}{cc} I_{sd}-h(A\bigotimes L) &{} 0 \\ -\varvec{b}^\mathrm{T}\bigotimes I_{d} &{} I_{d} \end{array}\right] {z_{\ell }}^{m+1} - \left[ \begin{array}{cc} 0 &{} h(\varvec{e}\bigotimes L) \\ 0 &{} I_{d} \end{array}\right] {z_{\ell }}^{m} \right. \\&-\left. \left[ \begin{array}{cc} h(A\bigotimes M)+I_{s}\bigotimes N &{} 0 \\ 0 &{} 0\end{array}\right] z_{\ell } - \left[ \begin{array}{cc} 0 &{} h(\varvec{e}\bigotimes M) \\ 0 &{} 0 \end{array}\right] \right\} , \end{aligned}$$while in LM case by computing the determinant
$$ P(z_{\ell }) = \det \left[ \sum _{j=0}^{k}\left( (\alpha _{j}I - h\beta _{j}L)z_{\ell }^{m} - \alpha _{j}N-h\beta _{j}M\right) z_{\ell }^{j}\right] . $$Also we decompose \(P(z_{\ell })\) into its real and imaginary parts.
- Step 2:
-
We examine whether \(P(z_{\ell })=0\) holds for each \(z_{\ell }\) \((\ell = 0, 1, \ldots , n-1)\) by checking its magnitude satisfies \(| P(z_{\ell }) |\le \delta _{1}\) with the preassigned small positive tolerance \(\delta _{1}\). If it holds, i.e., \(z_{\ell }\in \mu \) is a root of P(z), then the numerical scheme for the NDDE system is not asymptotically stable and stop the algorithm. Otherwise, to go to the next step.
- Step 3:
-
We examine whether \(\frac{1}{2\pi }\triangle _{\mu }\arg P(z_{\ell })=d(s+1)(m+1)\) in RK case (or \(d(k+m)\) in LM case ) holds along the sequence \(\{ P(z_{\ell })\}\) by checking \(|\frac{1}{2\pi }\triangle _{\mu }\arg P(z_{\ell })-d(s+1)(m+1)|\le \delta _{2}\) in RK case ( or \(|\frac{1}{2\pi }\triangle _{\mu }\arg P(z_{\ell })-d(k+m)|\le \delta _{2}\) in LM case ) with the preassigned tolerance \(\delta _{2}.\) If it holds, it means that the change of the argument along the sequence \(\{ P(z_{\ell })\}\) is \(d(s+1)(m+1)\) in RK case (or \(d(k+m)\) in LM case ), then the numerical scheme for the NDDE system is asymptotically stable, otherwise not stable.
Remark 4.3
From the above three theorems, in order to solve numerically an asymptotically stable delay differential system of neutral type by an RK or LM method, it is enough for us to choose a positive integer m such that the resulting difference system is asymptotically stable. When the positive integer m is determined, the step-size \(h= {\tau }/{m}\) is obtained such that the RK or LM method can work. Theorems 4.1, 4.2 and 4.3 do not contradict the results reported in [7, 18] which assert for any A-stable natural RK method for system (1.3) and for any step-size \(h={\tau }/{m},\) (where m is a positive integer) there exists an asymptotically stable linear system for which the resulting system is not asymptotically stable, i.e., \(u_{n}\rightarrow 0 \quad \text{ as }\quad n\rightarrow \infty \) does not hold.
Remark 4.4
Both Schur–Cohn and Jury stability criteria [15] need information of all the coefficients of the characteristic polynomial \(P_{RK}(z)\) (or \(P_{LM}(z)\)). It is a well-known ill-posed problem to compute all the coefficients of the characteristic polynomial for a high dimensional matrix [8]. Although Schur–Cohn and Jury stability criteria can be applied to the resulting difference systems from RK and LM methods in theoretical sense, they can not work well in practice when m or d are big. Algorithm 2 avoids computation of the coefficients of the characteristic polynomial \(P_{RK}(z)\) (or \(P_{LM}(z)\)). It evaluates the determinant \(P_{RK}(z_{\ell })\) or \(P_{LM}(z_{\ell })\) through the elementary row (or column) operations which are relatively efficient ways [14].
5 Numerical examples
In this section, two numerical examples are given to demonstrate the main results in Sects. 2 and 3. The matrix norm \(\Vert F \Vert _{2}\) is defined by
which is equal to the special case of the H-norm for \(H = I\), i.e., \(\Vert F\Vert _{I} = \Vert F \Vert _{2}\) holds. The number of significant digits is 4, and all the equality signs hold in this sense. The classical fourth-order RK formulas for ODEs (4.1), which is given as
is our underlying scheme of the natural RK for (1.1).
Example 1
The two-dimensional linear neutral system (1.1) with the parameter matrices
We have that \(\rho (N)=0.9<1,\) i.e, condition (1.2) holds. Since \(\Vert N\Vert _{2}=1.0065>1,\) we have to solve Stein equation to obtain a matrix H such that \(\Vert N\Vert _{H}<1.\) We have that
Furthermore,
Since \(\Vert N\Vert _{H}<1,\) we have that
Let the initial vector function be
-
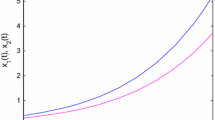
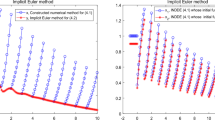
The case of \(\tau =1.1\). Algorithm 1 is employed to check stability of the system. As we have \(\triangle _{\varGamma _{\beta }}\arg P(s)=0\) along the curve \(\varGamma _{\beta }\), Theorem 3.2 tells that the system with the given parameter matrices is asymptotically stable. Now using Algorithm 2 with \(n=3.2\times 10^{5}\) to check delay-dependent stability of the RK method for the system. When \(m=100,\) we obtain that \(\triangle _{\mu }\arg P_{RK}(z) = d(s+1)(m+1)=2(4+1)(100+1)=1010.\) Theorem 4.1 asserts the RK method is weakly delay-dependently stable. The numerical solution, which is converging to 0, is depicted in Fig. 2. Conversely, when \(m=10,\) we obtain \(\triangle _{\mu }\arg P_{RK}(z)=97 \ne d(s+1)(m+1)=2(4+1)(10+1)=110\) and the theorem does not hold. The numerical solution is divergent and its behaviour is shown in Fig. 3.
-
The case of \(\tau =3.0\). Again we employ Algorithm 1 to check stability of the system. As we have \(\triangle _{\varGamma _{\beta }}\arg P(s)=2\) along the curve \(\varGamma _{\beta }\), Theorem 3.2 tells that the system with the given parameter matrices is not asymptotically stable. Then the assumptions of Theorem 4.1 do not hold and the numerical solution is not guaranteed to be asymptotically stable. In fact, its figure given in Fig. 4 shows a divergence for \(m=100\). We also carried out several numerical experiments for \(m>100,\) whose numerical solutions are still divergent.

Numerical solutions are asymptotically stable when \(m=100\) for \(\tau =1.1\) in Example 1

Numerical solutions are not stable when \(m=10\) for \(\tau =1.1\) in Example 1

Numerical solutions are not stable when \(m=100\) when \(\tau =3\) in Example 1
Example 2
We take the following four-dimensional linear neutral system with the parameter matrices given by
We have \(\rho (N)=0.08540<1,\) i.e, the condition (1.2) holds. Furthermore,
Since \(\Vert N\Vert _{2}<1,\) we can take \(H=I\) and we have
Let the initial vector function be
-
The case of \(\tau =0.1\). The procedure goes similarly to Example 1. Since our computation gives \(\triangle _{\varGamma _{\beta }}\arg P(s)=0\) along the curve \(\varGamma _{\beta },\) according to Theorem 3.2, we can confirm that the system with the given parameter matrices is asymptotically stable.
Now using Algorithm 2 with \(n=3.2\times 10^{5}\) to check delay-dependent stability of the RK method for the system. In the case of \(m=100\), our computation gives that \(\triangle _{\mu }\arg P_{RK}(z) = d(s+1)(m+1)=4(4+1)(100+1)=2020.\) Thus, by Theorem 4.1, the RK method is weakly delay-dependently stable. In fact, the numerical solution is convergent as shown in Fig. 5. Even when \(m=1,\) we can compute \(\triangle _{\mu }\arg P_{RK}(z) = d(s+1)(m+1)=4(4+1)(1+1)=40.\) Hence again the RK method is weakly delay-dependently stable and the numerical solution is convergent as shown in Fig. 6.
-
The case of \(\tau =0.3\). Since the computation in Algorithm 1 gives \(\triangle _{\varGamma _{\beta }}\arg P(s)=2\) along the curve \(\varGamma _{\beta },\) according to Theorem 3.2, we can confirm that the system with the given parameter matrices is not asymptotically stable. Then, the assumptions of Theorem 4.1 do not hold and the numerical solution is divergent for \(m=100\), whose computed results are shown in Fig. 7. We also carried out several other numerical experiments for \(m>100\), but the numerical solutions are still divergent.

Numerical solutions are asymptotically stable when \(m=100\) for \(\tau =0.1\) in Example 2

Numerical solutions are asymptotically stable when \(m=1\) for \(\tau =0.1\) in Example 2

Numerical solutions are not stable when \(m=100\) for \(\tau =0.3\) in Example 2
The two numerical examples show that our main results work well in the actual computations. Therefore, we can employ them to seek a step-size h so as to give numerically stable solution by Runge–Kutta or linear multi-step method. That is, assume that we are given an asymptotically stable system (1.1), then we can select an appropriate natural number m for the step-size \(h = \tau /m\) which yields an asymptotically stable numerical solution by utilizing our criterion.
6 Conclusions
For the asymptotic stability of analytical solution of the NDDE system (1.1) with (1.2), Theorem 3.2 provides a novel necessary and sufficient condition, which extends the results in the literature. Then, we present a relaxed definition, Definition 4.1, for delay-dependent stability of numerical methods. By applying this, Theorems 4.1, 4.2 and 4.3 provide sufficient conditions for delay-dependent stability of RK and LM methods, respectively. They show that it is possible to seek a step-size \(h={\tau }/{m}\) such that the resulting difference system by a standard RK or a LM method is asymptotically stable for an asymptotically stable NDDE system. Theorems can not guarantee an existence of such a step-size \(h= {\tau }/{m}\) for all asymptotically stable NDDE systems. However, for many cases of the system the theorems can hold. Furthermore, two algorithms are provided for checking delay-dependent stability of analytical and numerical solutions, respectively.
References
Bellen, A., Jackiewicz, Z., Zennaro, M.: Stability analysis of one-step methods for neutral delay-differential equations. Numer. Math. 52, 605–619 (1988)
Bellen, A., Zennaro, M.: Numerical Methods for Delay Differential Equations. Oxford University Press, Oxford (2003)
Benner, P., Sima, V., Slowik, M.: Evaluation of the linear matrix equation solvers in SLICOT. J. Numer. Anal. Ind. Appl. Math. 2, 11–34 (2007)
Breda, D., Maset, S., Vermiglio, R.: Stability of Linear Delay Differential Equatons. Springer, New York (2015)
Brown, J.W., Churchill, R.V.: Complex Variables and Applications. McGraw-Hill Companies Inc. and China Machine Press, Beijing (2004)
Calvetti, D., Levenberg, N., Reichel, L.: Iterative methods for \(X-AXB=C,\). J. Comput. Appl. Math. 86, 73–101 (1997)
Guglielmi, N.: Asymptotic stability barriers for natural Runge–Kutta processes for delay equations. SIAM J. Numer. Anal. 39, 763–783 (2001)
Hairer, E., Nørsett, S.P., Wanner, G.: Solving Ordinary Differnetial Equations I: Nonstiff Problems, 2nd edn. Springer, Berlin (1993)
Hale, J.K., Verduyn, S.M.: Lunel, strong stabilization of neutral functional differential equations. IMA J. Math. Control Inf. 19, 5–23 (2002)
Hu, G.D., Mitsui, T.: Stability analysis of numerical methods for systems of neutral delay-differential equations. BIT 35, 504–515 (1995)
Hu, G.D., Liu, M.: Stability criteria of linear neutral systems with multiple delays. IEEE Trans. Autom. Control 52, 720–724 (2007)
Hu, G.D., Zhu, Q.: Bounds of modulus of eigenvalues based on Stein equation. Kybernetika 46, 655–664 (2010)
Huang, C., Vandewalle, S.: An analysis of delay-dependent stability for ordinary and partial differential equations with fixed and distributed delays. SIAM J. Sci. Comput. 25, 1608–1632 (2004)
Johnson, L.W., Dean Riess, R., Arnold, J.T.: Introduction to Linear Algebra. Prentice-Hall, Englewood Cliffs (2000)
Jury, E.I.: Theory and Application of \(z\)-Transform Method. Wiley, New York (1964)
Lambert, J.D.: Numerical Methods for Ordinary Differential Systems. Wiley, New York (1991)
Lancaster, P.: The Theory of Matrices with Applications. Academic Press, Orlando (1985)
Maset, S.: Instability of Runge–Kutta methods when applied to linear systems of delay differential equations. Numer. Math. 90, 555–562 (2002)
Medvedeva, I.V., Zhabko, A.P.: Synthesis of Razumikhin and Lyapunov–Krasovskii approaches to stability analysis of time-delay systems. Automatica 51, 372–377 (2015)
Acknowledgements
The authors wish to thank Miss Fangyuan Zhao for implementing the numerical experiments. The authors also thank the anonymous reviewer for his valuable comments and suggestions which are helpful to improve this paper. Guang-Da Hu is supported by the National Natural Science Foundation of China (No. 11371053 and No. 61372090). Taketomo Mitsui is partially supported by the Grants-in-Aid for Scientific Research (No. 24540154) supplied by Japan Society for the Promotion of Science.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Christian Lubich.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Hu, GD., Mitsui, T. Delay-dependent stability of numerical methods for delay differential systems of neutral type. Bit Numer Math 57, 731–752 (2017). https://doi.org/10.1007/s10543-017-0650-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10543-017-0650-4
Keywords
- Delay differential systems of neutral type
- Delay-dependent stability
- Runge–Kutta method
- Linear multi-step method
- Argument principle