
Abstract
Biocontrol by wild insects and other organisms is an important service provided to agriculture, but few studies have linked the role of this service to urban garden crop production. In 15 urban food gardens in Sydney, Australia, we assessed predation and parasitism of two sentinel prey species, recorded pest control activities undertaken by gardeners and the produce yielded by garden crops. We observed substantial removal of sentinel prey (mean removal 22% for Tenebrio molitor larvae and 59% for Helicoverpa armigera) but no parasitism. Vertebrate predators primarily consisted of urban adapted birds and mammals common throughout Australian cities. We measured a range of local and landscape scale environmental variables including plant richness and abundance, light, canopy cover, building density and distance to remnant vegetation. We found that gardeners undertook only basic pest control activities with little chemical use, yet high amounts of produce were harvested. Pest control services were poorly explained by environmental variables. Low active pest control activities, and high predation rates suggest pests are either well controlled or in low numbers in the surveyed urban food gardens. Given the vertebrate predators were generalist birds and mammals common to many parts of urban Australia, the provision of predation services to urban gardens by these taxa could be widespread across the continent.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Urban agriculture (UA)—the practice of growing crops within cities—is practiced by over 266 million households worldwide (Hamilton et al. 2013) and is growing in popularity (Mok et al. 2013). Growing food in cities can improve food security (Warren et al. 2015), provide essential nutrients in communities with limited access to fresh food (Mok et al. 2013) and produce a range of other social and environmental benefits (Clinton et al. 2018). Although UA currently only makes up around 5% of global cropland (Thebo et al. 2014), it has a long history of generating supplemental food supplies during times of crisis (Edmondson et al. 2014).
Food production systems in rural areas are often attacked by pests that reduce yields. Animal pests can cause potential losses of up to 18% in key global crops, reduced to realised losses of around 10% due to control measures (Oerke and Dehne 2004). In most rural farming systems, pest control is primarily achieved by using chemical control agents (Hedlund et al. 2020), with $US 16 billion annually spent on insecticides alone (Atwood and Paisley-Jones 2017). However in UA systems, social, legal and public health issues often make chemical pest control less viable, and gardeners are more likely to take an Integrated Pest Management (IPM) approach, relying on multiple means of pest management including biological control (Guitart et al. 2012).
Biological control by the natural enemies of pests reduces pest damage in nearly all farming systems, with these naturally occurring pest control services estimated to be worth $US 63 billion per year globally (Costanza et al. 2014). In rural agricultural systems, semi-natural landscapes surrounding farmland often increase the provision of biological control services by providing habitat and alternative food sources to natural enemies of pests (Veres et al. 2013). Maintenance of these landscapes thus forms part of IPM strategies that can help to keep pests below economically damaging levels whilst minimising the use of pesticides (FAO 2018).
While a great deal of literature has examined the role of natural enemies in rural areas, the environmental features that mediate pest control services to urban systems have been less explored (Philpott and Bichier 2017). Some urban studies have found features similar to those that improve performance of biological control in rural systems, such as floral resources and increased vegetation complexity, to have a similar effect (e.g., Rebek et al. 2005; Yadav et al. 2012; Arnold et al. 2019). Other studies have failed to demonstrate an impact of environmental features on biological control in urban settings (e.g., Gardiner et al. 2014; Lowenstein et al. 2017) and others still have found relationships to vary markedly between locations or types of organisms involved (e.g., Philpott and Bichier 2017; Morales et al. 2018). Along with these inconsistent findings, another limitation of the existing literature is its narrow geographic range, with all studies listed above or reviewed by Arnold et al. (2019) performed in Europe and North America.
This study seeks to better understand pest dynamics in UA, with a focus on the role biological pest control services provides in these systems. Using UA gardens in warm temperate South-Eastern Australia as case studies, we ask the following questions: (1) What pest control methods are primarily employed by UA practitioners? (2) Do the predators and parasitoids found within UA systems provide effective biological pest control services and what is their relationship with urban crop yields? And (3) how are these pest control services influenced by environmental factors within gardens and their surrounds?
Materials and methods
Study sites
We carried out analyses of pest control activity in 15 urban food gardens (or a subset thereof) within the cities of Sydney and Wollongong, New South Wales (NSW), Australia. Gardens varied in terms of structure, tenure, surrounding land use and size (ranging from 42 to 22,255 m2 in total area). All were used year round for growing food plants by primarily amateur gardeners, with the majority of food being for household use and only a small proportion being sold (Supplementary Information S1).
Garden pest control and yield
To understand pest control techniques employed in UA we surveyed 27 gardeners managing plots within the 15 study sites about the methods they use to manage pests within their gardens (Survey questions shown in Supplementary Information S2). Participants were invited to participate by contacting gardening organisations throughout the greater Sydney area. This non-random method of participant recruitment enabled the selection of interested gardeners that were more likely to provide the labour and effort required to carry out the project reliably.
Thirteen of these gardeners also provided data on yields from, and inputs (including pest control products) to, their plots using logbooks (Supplementary Information S3).Whilst self-reported data can potentially introduce measurer bias, it facilitates examination of more gardens than a researcher could directly monitor. The technique is commonly used in UA studies (e.g., Reeves et al. 2013; CoDyre et al. 2015) and the data obtained from the surveys and logbooks used here have also formed part of a broader study of productivity and ecosystem services in UA (McDougall et al. 2019, 2020, 2022). Garden sites were regularly visited by a researcher in order to collect environmental data (see “Predation and parasitism in urban gardens” and “Measurement of environmental variables” below), allowing consistency between reported data and onsite conditions to be monitored. A researcher was also in regular contact with gardeners to ensure logbooks were completed accurately.
Predation and parasitism in urban gardens
We examined the extent to which pests were consumed by natural enemies within gardens using two sentinel organisms that we anticipated would be attacked by different groups of enemies. We used mealworms (Tenebrio molitor larvae) to assess vertebrate predation and cotton budworms (Helicoverpa armigera) to assess predation and parasitism by insects.
Mealworm predation
Mealworms were chosen as a sentinel organism as they are undefended, palatable to a wide range of vertebrates and are commonly used as surrogates for wild arthropod larvae in predation experiments (e.g., Bonati et al. 2008; Halpin et al. 2013). Mealworms were obtained from a commercial pet supply outlet and presented in the field in 210 ml transparent plastic containers, with ten live larvae per container. Odourless horticultural glue (Tree Guard™ – HTC International) was painted midway around the outside of each container to prevent entry by crawling arthropods as pilot studies showed ants quickly located containers in all surroundings tested. With ants excluded we anticipated mealworms would primarily be preyed upon by vertebrates due to this organism’s relatively large size, although larger flying insects may also have had the potential to remove them from containers.
We observed organisms preying on mealworms using Scout Guard 560 K‒8 M motion sensitive infrared and visible light cameras, set to record 10 s of video footage whenever motion was detected within their field of view. We were limited to using four cameras per site due to limited space in some sites that met our placement criteria without creating concerns about privacy or camera security. To increase sample size regarding predation levels we added an additional two containers of mealworms during each trial that were not observed by cameras, for a total of six containers of meal worms presented at each site during each trial. Containers were at least 3 m apart from each other in positions where they were not visible from above.
Trials lasted 24 h and we carried out three trials at each of 14 sites. Trials took place during dry weather between May and August 2017. Following each trial we counted the number of mealworms that had been taken and identified organisms responsible in video footage.
Helicoverpa predation and parasitism
We assessed predation and parasitism by insects using H. armigera as a sentinel organism. This species was chosen as it is a widespread pest in eastern Australia, is preyed on and parasitised by a range of species and has a well understood life cycle and management requirements (Room 1979, 1983). The species has a wide range of host plants and occurs in the Sydney region, Australia (Zalucki et al. 1986).
H. armigera larvae and eggs were obtained from the NSW Department of Primary Industries and were presented in the field as eggs and second instar larvae as these two stages are vulnerable to attack by a different range of parasitoids (King and Coleman 1989). We presented eggs and larvae in 210 ml transparent plastic containers, with each holding 5–13 larvae and an ‘egg card’, a piece of muslin onto which eggs had been oviposited, containing approximately 40 eggs. Larvae were placed on a freshly picked bean leaf (Phaseolus vulgaris) in the containers the night before the trial began, with its stem placed in a water filled floristry phial to assist it maintaining turgor. Egg cards were affixed to the inside wall of the container.
A number of measures were employed to ensure larvae did not escape. A ring of odourless horticultural glue (Tree Guard™ – HTC International) was painted around the rim of the container and the container was glued into the centre of a dull brown coloured pet food bowl filled with water, creating a ‘moat’ around the container. Finally, a piece of 12 mm aperture wire mesh was placed on top of the container to ensure that the leaf could not blow away and to exclude vertebrate predators. While these measures also excluded non-flying arthropod predators, they allowed us to examine the impact of parasitoids and flying predators while ruling out escape by larvae. Placement of containers was as per mealworm trials.
H. armigera trials lasted 48 h. Two trials were conducted using larvae and eggs, in December 2016 and January 2017, each trial taking place for all sites across the same time period. A third trial using only eggs took place in March 2017. Due to concerns by some gardeners about the introduction of this pest, only seven study sites were used. Following completion of each trial we recorded all larvae as dead, alive or missing. Each egg card and each live larva was then reared to determine the presence of parasitoids, as outlined in Supplementary Information S4.
Measurement of environmental variables
We tested the effect on biocontrol services of a number of environmental variables known or suspected to impact on these within rural or urban environments (Tables 1 and 2). Variables examined and their measurement methods are outlined in the following sections.
Garden scale variables
Variables relating to garden vegetation and structure (Table 1) were measured through onsite observations using a number of 3 × 3 m quadrats, the combined area of which equalled 10% of the garden’s area (to a maximum of 50 quadrats), with centre points selected by random number generator. All quadrat measurements were carried out three times, in summer 2016–2017 during or shortly after Helicoverpa trials and two additional times four and eight months prior during spring and autumn. These earlier measurements were included as changes in resources available at one time of year can impact the insect fauna present throughout the year (Isaacs et al. 2009). Variables measured across multiple periods were included in statistical models based on their mean annual values, along with their summer values (for H. armigera trials) and their autumn values (for mealworm trials).
Floral density (number of flowers per m2) was determined by counting the number of flowers per quadrat (compound flowers were considered a single ‘floral unit’ as per Lowenstein et al (2015)). Number of flowers per quadrat was averaged across each site. Floral area was defined as the total area of floral display (cm2 m-2). Five flowers of each flowering species present were measured as per Hegland and Totland (2005) to determine the average size for each species. Total floral area per quadrat was determined by multiplying number of flowers of each species by the average floral area of that species and this figure was averaged across each site.
The total number of plant species, as well as the subset of species in flower at the time of each measurement, was counted in each quadrat. Garden scale species richness was determined by dividing the total number of species found across all quadrats at a site by the total number of quadrats measured at that site. For sites where more than ten quadrats were measured, to ensure differences in site size did not bias results, species accumulation curves were plotted for both total number of species and number of flowering species to determine if all species present had been found. If curves reached asymptote, we divided the number of species by the number of quadrats required to reach asymptote. If curves did not reach asymptote, or if a site contained fewer than ten quadrats, we divided species number by total number of quadrats.
Vegetation complexity was measured using a Structural Complexity Index as per Shrewsbury and Raupp (2000). Each of the nine 1-m2 squares that made up a quadrat was given a complexity rating between 0 and 5 based on the number of vegetative strata layers it contained and each quadrat’s sum was averaged across each site.
Sunlight exposure was measured using a Li-Cor photometer (Model LI-189) at 30 randomly selected locations within the garden at a height of 1.5 m at noon on a cloudless summer day. Land use diversity was calculated across each garden using Shannon’s Diversity Index by measuring the total size of each garden and the proportions of the site that was covered by different land uses (e.g., cropping beds, lawns, impervious surfaces, etc.) (Matteson and Langellotto 2010).
Landscape scale variables
Landscape scale variables (Table 2) were measured in a 1 km radius around each garden and showed a gradient from moderate to heavy levels of urbanisation. Canopy cover, building density and road length were measured at radii of 100, 500 and 1000 m around each study site.
The proportion of the landscape within each radius covered by tree canopy (greater than 2 m tall) and by building footprints was determined using LIDAR derived point cloud (0.5 m resolution) data (NSW Government Spatial Service 2013) buffered to form polygons using Arc GIS 10.4.1. Total length of roads was determined using a Road Centreline dataset (NSW Government Spatial Service 2018) and summed using Arc GIS. Distance to the nearest patch of bushland at least 1ha in area was measured using Arc GIS. Human population density in the statistical block in which each site was located was obtained from the Australian Bureau of Statistics (2018).
Statistical analysis
Analysis was carried out using R 3.4.4 software (R Development Core Team 2018). Dependent variables were initially modelled against a single fixed explanatory variable (Tables 1 and 2) and relevant random variables (outlined below) using linear models, generalised linear models (GLM) or generalised linear mixed models (GLMM) with the “lme4” package (Bates et al. 2015). For each dependant variable we produced a model for each potential explanatory variable as well as a null model (with a constant used in place of any fixed variables).
Once these models had been produced they were ranked by comparing AICc values – a variation on Akaike Information Criterion (AIC) adjusted for small sample size (Burnham and Anderson 2002). For each dependent variable we determined R2 and p-values for the most highly ranked model and all other models within ΔAICc < 2 of that model more highly ranked (lower AICc) than the null model. In the case of models containing random effects, R2 values used were marginal R2 determined using the “MuMln” package (Barton 2009) whilst p-values were determined with a χ2 test (using likelihood ratio tests) comparing tested models to the null model.
If multiple models were ranked more highly than the null model, a new model with multiple explanatory variables was produced, using the explanatory variables from the three highest ranked single variable models as explanatory variables in this single model. We used a maximum of three variables to avoid overfitting (Makinson et al. 2016) and variables that were strongly correlated (Spearman’s rho > 0.7) or which represented the same environmental feature (e.g., canopy cover at multiple radii) were not modelled together.
Mealworm predation was modelled as the total number of larvae removed from a site across all three trials, each site being considered a single data point. We plotted this number against potential explanatory variables using a GLM with negative Binomial distribution and a log link function. As we only observed mealworms to be preyed on by vertebrates and non-nectivorous vertebrates were unlikely to be impacted by factors such as floral diversity, we compared mealworm removal to only a smaller subset of environmental variables (Tables 1 and 2). Predation of H. armigera was measured as the proportion of larvae removed, with each container considered a separate data point. We fitted models using a GLMM with Binomial distribution (weighted by the number of larvae in each container) with a logit link function and site and trial number as random factors.
Possible relationships between yield and pest control were examined using linear models (with Normal distribution and an identity link function). We examined two measures of yield: produce harvested per m2 of garden plot (after square root transformation) and per hour of human labour invested and compared these to number of mealworms removed at that site at the 12 sites for which we had both yield data and mealworm removal data. Due to the smaller number H. armigera sample sites, not all of which were sites from which we had yield data, we did not compare this figure to yield. Yield models were checked to confirm assumptions of normality and homoscedasticity while all models were checked to confirm assumptions of linearity and goodness of fit.
Results
Pest control and garden yield
The most widely used method of pest control amongst gardeners was the application of organic ‘pesticide’, used by 52% of gardeners (Fig. 1). Organic pesticides included products purchased from commercial outlets (mainly plant oil based) as well as home-made substances consisting of ingredients including oils, soap, milk and extracts of pungent plants such as chilli and garlic. They were primarily a reactive measure, used in response to pest organism presence, rather than proactive measures to prevent pests appearing. The next most widely used technique was manual removal of pests (e.g., pulling off caterpillars by hand). Gardeners embraced biological control to only a limited degree, 22% said they used companion planting to help control pests (e.g., planting marigolds to repel root parasitising nematodes (Hooks et al. 2010)) and only one took deliberate steps to encourage natural enemies of pests, by planting flowering plants they believed would be attractive to them. Just 7% of gardeners used purchased pathogenic biocontrol agents (e.g., Bacillus thuringiensis) and 11% of gardeners took no action to control pests.

Pest control methods employed by gardeners (n = 27)
No gardeners reported using pesticides other than the organic pesticides and biopesticides noted above and all the gardens generally followed organic pest management principles. Despite these limited pest control activities, gardeners generally reported high yields, with an average output of 5.94 kg of produce harvested per m2 of land under cultivation per year. Crops consisted of 62 varieties of fruit, vegetables and herbs from across the 13 gardens for which these data were recorded (Supplementary Information S5).
Predation of mealworms
Totalled across all trials an average of 39 (± 35) mealworms were taken per site (out of a possible 180–22% removal rate) with a broad range from 0 to 128. Fourteen species of vertebrates, 11 birds and three mammals, nine native and five exotic species, were recorded removing meal worms (Table 3). We did not observe any instances of mealworm removal by insects, although insect predators would mostly have been too small to trigger the cameras, so some role for insect predators cannot be ruled out. None of the environmental variables tested had any strong explanatory power in relation to number of mealworms removed, with the most highly ranked model tested being the null model (Null AICc 134.40 vs. most highly ranked substantive model AICc 134.56—Supplementary information S6).
Predation and parasitism of Helicoverpa
Across all sites and trials, an average of 59% of all H. armigera larvae were removed, with the removal rate across sites varying from 50 to 67%. We found no evidence of parasitism amongst larvae that were returned alive. All either metamorphosed into adults or died prior to this stage without parasitoids being observed. We also found no evidence of parasitism of eggs.
The highest ranked model examining proportion of H. armigera removed (AICc 370.45 vs. Null AICc 374.41) used the explanatory variable of area of buildings within 500 m. This model was statistically significant (χ2 = 5.95, df = 1, p = 0.015) with a positive, though very weak, relationship (R2 = 0.012). Five other single variable models ranked more highly than the null model by ΔAICc > 2 (Table 4). All were statistically significant but also showed very weak relationships (R2 values 0.009–0.012). A model with multiple explanatory variables (using the three highest ranked non-correlated variables: buildings 500 m, floral area (full year) and bushland distance) was found to not be statistically significant (R2 = 0.014, χ2 = 7.17, df = 3, p = 0.067).
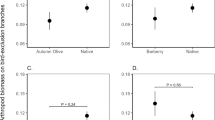
Relationship between predation and yield
We found no significant relationship between yield of produce and removal rate of mealworms, when measured either as weight of crops per m2 of land cultivated (R2 = 0.06, F = 0.628 df = 1,10, p = 0.447) or weight of crops per hour of labour invested (R2 = 0.01, F = 0.097,df = 1,10, p = 0.762).
Discussion
We found that vertebrates and flying insects provided biocontrol services in Australian urban food gardens, with 22% of mealworms and 59% of H. armigera taken by predators. This is consistent with similar studies from other parts of the world that also found substantial numbers of pests removed by predators in urban gardens (e.g., Gardiner et al. 2014; Lowenstein et al. 2017; Philpott and Bichier 2017; Morales et al. 2018). The predator assemblage observed varied substantially between sites but was composed mostly of common urban adapted species. For example magpies, currawongs, butcher birds and noisy miners are amongst the most abundant birds within Australian cities and the brush tailed possum is one of the few native mammals considered to have a commensal relationship with humans (Garden et al. 2006). This implies that vertebrates able to remove pests are likely to be present in many UA systems across the country.
Insect predators readily consumed H. armigera, despite our methodology excluding non-flying arthropod predators such as ants and spiders. Thus, under more field realistic scenarios a greater predation rate may possibly be expected. Despite this we found no evidence of in situ parasitism of larvae or eggs. This may be because predators of H. armigera are often generalists whilst their parasitoids are more specialised (Greathead and Girling 1981). While the species occurs in the Sydney region (Zalucki et al. 1986), records of H. armigera being heavily parasitised come primarily from cotton fields several hundred kilometres away, where it is an abundant pest (Room 1979). Hence parasitism may not have occurred because relevant parasitoids were absent from the studied sites. Alternatively, egg or larval abundance may have been insufficient to attract parasitoids, the detached bean leaves on which larvae were presented may have lacked appropriate chemical cues for parasitoids, or these cues may have been obscured by odours from the plastic containers in which H. armigera were presented (Kyi et al. 1991; Richter 2000). It is possible that using a host which is more noticeable and commonly found in the area may have resulted in greater levels of parasitism.
We found little evidence of environmental variables impacting on biological control. None of the factors measured had a significant effect on removal of meal worms while removal of H. armigera was impacted very weakly, at a level that would not be ecologically relevant (R2 = 0.009–0.012). Whilst birds often respond strongly to environmental features in urban areas (Beninde et al. 2015) none of our analyses showed any relationship with mealworm removal, for which birds were primarily responsible. This may be due to species-specific differences in habitat preference. For example, Australian magpies prefer foraging in open habitats whilst noisy miners prefer moderately dense vegetation (Garden et al. 2006). Thus, changes in vegetation may impact each species in different ways, resulting in no net measurable change in mealworm removal.
Our insect predation results are consistent with a number of previous studies showing individual environmental variables in urban areas poorly explain biocontrol provision (e.g., Gardiner et al. 2014; Lowenstein et al. 2017), although other studies have found strong effects of features such as vegetation complexity and diversity (e.g., Philpott and Bichier 2017; Morales et al. 2018; Arnold et al. 2019). These frequently observed weak relationships may be due to urban environments being highly heterogeneous, with plant community composition being largely controlled by human choices (Lowenstein and Minor 2016), choices that are made independently in hundreds of properties present in any given 1 km radius. This means important components of landscape resources and habitat variability may be missed within the urban matrix (Lizée et al. 2011).
Gardeners undertook limited pest control activities, with the most common actions being reactive targeted pest removal (through use of organic pesticides and manual removal). All gardeners surveyed practiced only organic pest control, despite our recruitment process not specifically targeting organic gardeners. While there may have been some selection bias within our sample, as environmentally conscious gardeners may have been more likely to respond to our request for participation, this finding is consistent with the commonly reported result from other research that, in developed countries, much UA is organic (Guitart et al. 2012).
Average yields recorded by gardeners were more than twice those typically recorded on Australian commercial fruit and vegetable farms, largely due to higher levels of inputs and the growing of mixed-crop plots (McDougall et al. 2019). While we have previously found such yields to be highly correlated with environmental factors (McDougall et al. 2022) they were not associated with predation rates. Hence, in these systems it appears that pests and their control do not strongly impact on yields. This is likely due to the heterogeneity of both gardens, with many species of crops grown together, rather than in monocultures, and the surrounding environments. While the varying nature of crops grown in each garden adds a level of ‘fuzziness’ to this analysis, as different crops inherently produce different yields, this fuzziness did not prevent previous analyses of these yield data from finding robust relationships with other environmental factors (McDougall et al. 2022). Additionally, it should be noted that we did not collect any data on the quality of the produce harvested. Given that the majority of the produce was used for personal consumption, it is possible that some of it may have suffered pest damage that, while not rendering it unconsumable, would still affect its marketability in a commercial setting.
We have found that, within urban gardens in the greater Sydney region, flying insects and common urban vertebrates provided substantial services as potential pest control agents. While the magnitude of these pest control services was poorly explained by environmental variables, it appears that these biocontrol services are sufficient to allow urban gardeners to produce high yields of crops with limited investment in human-mediated pest control.
References
Arnold JE, Egerer M, Daane KM (2019) Local and landscape effects to biological controls in urban agriculture—a review. Insects 10:215
Atwood D, Paisley-Jones C (2017) Pesticides industry sales and usage 2008–2012 market estimates. United States Environmental Protection Authority, Washington
Australian Bureau of Statistics (2018) Census data packs 2016. http://www.abs.gov.au/websitedbs/D3310114.nsf/Home/2016%20DataPacks. Accessed 16 Apr 2018
Bates D, Mächler M, Bolker B, Walker S (2015). “Fitting Linear Mixed-Effects Models Using lme4.” J Stat Softw 67(1):1–48
Barton, K. (2009). MuMIn: multi-model inference. http://r-forge.r-project.org/projects/mumin/
Beninde J, Veith M, Hochkirch A (2015) Biodiversity in cities needs space: a meta-analysis of factors determining intra-urban biodiversity variation. Ecol Lett 18:581–592
Bonati B, Csermely D, Romani R (2008) Lateralization in the predatory behaviour of the common wall lizard (Podarcis muralis). Behav Processes 79:171–174
Burnham KP, Anderson DR (2002) Model selection and multimodel inference: a practical information—theoretic approach. Springer, New York
Clinton N, Stuhlmacher M, Miles A, Aragon N, Wagner M, Georgescu M, Herwig C, Gong P (2018) A global geospatial ecosystem services estimate of urban agriculture. Earths Future 6:40–60
CoDyre M, Fraser EDG, Landman K (2015) How does your garden grow? An empirical evaluation of the costs and potential of urban gardening. Urban For Urban Green 14(1):72–79
Costanza R, de Groot R, Sutton P, Van der Ploeg S, Anderson SJ, Kubiszewski I, Farber S, Turner RK (2014) Changes in the global value of ecosystem services. Glob Environ Change 26:152–158
Edmondson JL, Davies ZG, Gasto KJ, Leake JR (2014) Urban cultivation in allotments maintains soil qualities adversely affected by conventional agriculture. J Appl Ecol 51:880–889
FAO (2018) AGP-integrated pest management. http://www.fao.org/agriculture/crops/core-themes/theme/pests/ipm. Accessed 5 Apr 2018
Garden J, McAlpine C, Peterson ANN, Jones D, Possingham H (2006) Review of the ecology of Australian urban fauna: a focus on spatially explicit processes. Austral Ecol 31:126–148
Gardiner MM, Prajzner SP, Burkman CE, Albro S, Grewal PS (2014) Vacant land conversion to community gardens: influences on generalist arthropod predators and biocontrol services in urban greenspaces. Urban Ecosyst 17:101–122
Greathead DJ, Girling DJ (1981) Possibilities for natural enemies in Heliothis management and the contribution of the commonwealth institute of biological control. In: Reed W, Kumble V (eds) Proceedings of the international workshop on Heliothis management. pp 147–158.
Guitart DA, Pickering C, Byrne J (2012) Past results and future directions in urban community gardens research. Urban For Urban Green 11:364–373
Halpin CG, Skelhorn J, Rowe C (2013) Predators’ decisions to eat defended prey depend on the size of undefended prey. Anim Behav 85:1315–1321
Hamilton AJ, Burry K, Mok HF, Barker SF, Grove JR, Williamson VG (2013) Give peas a chance? Urban agriculture in developing countries. A review. Agron Sustain Dev 34:45–73
Hedlund J, Longo SB, York R (2020) Agriculture, pesticide use, and economic development: a global examination (1990–2014). Rural Sociol 85(2):519–544
Hegland SJ, Totland O (2005) Relationships between species’ floral traits and pollinator visitation in a temperate grassland. Oecologia 145:586–594
Hooks CRR, Wang KH, Ploeg A, McSorley R (2010) Using marigold (Tagetes spp.) as a cover crop to protect crops from plant-parasitic nematodes. Appl Soil Ecol 46:307–320
Isaacs R, Tuell J, Fielder A, Gardiner MM, Landis D (2009) Maximising arthropod-mediated ecosystem services in agricultural landscapes: the role of native plants. Front Ecol Environ 7:196–203
King EG, Coleman RJ (1989) Potential for biological control of Heliothis species. Annu Rev Entomol 34:53–75
Kyi A, Zalucki MP, Titmarsh IJ (1991) An experimental study of early stage survivorship of Helicoverpa armigera (Lepidoptera: Noctuidae) on cotton. Bull Entom Res 81:263–271
Lizée MH, Manel S, Mauffrey JF, Tatoni T, Deschamps-Cottin M (2011) Matrix configuration and patch isolation influences override the species—area relationship for urban butterfly communities. Landsc Ecol 27:159–169
Lowenstein DM, Minor ES (2016) Diversity in flowering plants and their characteristics: integrating humans as a driver of urban floral resources. Urban Ecosyst 19:1735–1748
Lowenstein DM, Matteson KC, Minor ES (2015) Diversity of wild bees supports pollination services in an urbanized landscape. Oecologia 179:811–821
Lowenstein DM, Gharehaghaji M, Wise DH (2017) Substantial mortality of cabbage looper (Lepidoptera: Noctuidae) from predators in urban agriculture is not influenced by scale of production or variation in local and landscape-level factors. Environ Entomol 46:30–37
Makinson JC, Threlfall CG, Latty T (2016) Bee-friendly community gardens: impact of environmental variables on the richness and abundance of exotic and native bees. Urban Ecosyst 20:463–476
Matteson KC, Langellotto GA (2010) Determinates of inner city butterfly and bee species richness. Urban Ecosyst 13:333–347
McDougall R, Kristiansen P, Rader R (2019) Small-scale urban agriculture results in high yields but requires judicious management of inputs to achieve sustainability. Proc Natl Acad Sci 116:129–134
McDougall R, Rader R, Kristiansen P (2020) Urban agriculture could provide 15% of food supply to Sydney, Australia, under expanded land use scenarios. Land Use Policy 94:1–12
McDougall R, Kristiansen P, Latty T, Jones J, Rader R (2022) Pollination service delivery is complex: urban garden crop yields are best explained by local canopy cover and garden scale plant species richness. J Appl Ecol 59:1248–1257
Mok HF, Williamson VG, Grove JR, Burry K, Barker SF, Hamilton AJ (2013) Strawberry fields forever? Urban agriculture in developed countries: a review. Agron Sustain Dev 34:21–43
Morales H, Ferguson B, Marín L, Gutiérrez D, Bichier P, Philpott S (2018) Agroecological pest management in the city: experiences from California and Chiapas. Sustainability 10:2068
NSW Government Spatial Service (2013) Elevation and depth. https://www.spatial.nsw.gov.au/what_we_do/the_natural_environment/elevation_and_depth. Acessed 18 Apr 2018
NSW Government Spatial Service (2018) Clip & Ship. http://maps.six.nsw.gov.au/clipnship.html. Acessed 18 Apr 2018
Oerke EC, Dehne HW (2004) Safeguarding production—losses in major crops and the role of crop protection. Crop Prot 23:275–285
Philpott SM, Bichier P (2017) Local and landscape drivers of predation services in urban gardens. Ecol Appl 27:966–976
R Development Core Team (2018) A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna. http://www.r-project.org
Rebek EJ, Sadof CS, Hanks LM (2005) Manipulating the abundance of natural enemies in ornamental landscapes with floral resource plants. Biol Control 33:203–216
Reeves J, Cheng Z, Kovach J, Kleinhenz MD, Grewal PS (2013) Quantifying soil health and tomato crop productivity in urban community and market gardens. Urban Ecosyst 17:221–238
Richter MR (2000) Social wasp (Hymenoptera: Vespidae) foraging behavior. Annu Rev Entomol 45:121–150
Room PM (1979) Parasites and predators of Heliothis spp. (Lepidoptera : Noctuidae) in cotton in the Namoi Valley, New South Wales. J Aust Entomol Soc 18:223–228
Room PM (1983) Calculations of temperature-driven development by Heliothis spp. (Lepidoptera: Noctuidae) in the Namoi Valley, New South Wales. J Aust Entomol Soc 22:211–215
Shrewsbury PM, Raupp MJ (2000) Evaluation of components of vegetational texture for predicting azalea lace bug, Stephanitis pyrioides (Heteroptera: Tingidae), abundance in managed landscapes. Environ Entomol 29:919–926
Thebo AL, Drechsel P, Lambin EF (2014) Global assessment of urban and peri-urban agriculture: irrigated and rainfed croplands. Environ Res Lett 9:114002
Veres A, Petit S, Conord C, Lavigne C (2013) Does landscape composition affect pest abundance and their control by natural enemies? A review. Agric Ecosyst Environ 166:110–117
Warren E, Hawkesworth S, Knai C (2015) Investigating the association between urban agriculture and food security, dietary diversity, and nutritional status: a systematic literature review. Food Policy 53:54–66
Yadav P, Duckworth K, Grewal PS (2012) Habitat structure influences below ground biocontrol services: a comparison between urban gardens and vacant lots. Landsc Urban Plan 104:238–244
Zalucki MP, Daglish G, Firempong S, Twine P (1986) The biology and ecology of Heliothis armigera (Hubner) and H. punctigera Wallengren (Lepidoptera : Noctuidae) in Australia: what do we know? Aust J Zool 34:779–814
Acknowledgements
We thank the anonymous gardeners who provided data on yields and gardening practices and allowed us access to their land over the course of this project.
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions. This work was supported by an Australian Post-graduate Award Scholarship and a University of New England Completion Scholarship provided to RM. Commonwealth Department of Education and Training.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors have no relevant financial or non-financial interests to disclose.
Ethical approval
All research involving human subjects was approved by the University of New England Human Research Ethics Committee (approval no. HE15-196). All participants provided informed consent in writing before commencing participation in this study.
Additional information
Handling Editor: Dirk Babendreier.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
McDougall, R., Kristiansen, P., Latty, T. et al. Vertebrates and flying insects provide biocontrol services to Australian urban food gardens. BioControl 69, 375–386 (2024). https://doi.org/10.1007/s10526-024-10264-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10526-024-10264-3