
Abstract
This paper presents a study of acceleration demands in low-rise reinforced concrete (RC) buildings with torsion, evaluated by quantifying peak floor accelerations (PFAs) and floor response (acceleration) spectra (FRS). The study was performed with the aim to provide simple empirical formulas to quantify the amplification effects due to torsion, which can occur in most of the existing and new RC buildings. With this goal in mind, a set of eight archetype buildings was selected, characterized by an increasing floor eccentricity obtained by moving the centre of rigidity (CR) away from the centre of mass (CM). Numerical models of the proposed set of archetype RC buildings were considered in both linear elastic and nonlinear configurations. For the latter, the properties of models were widely varied, by systematically modifying parameters of plastic hinges, in order to obtain a sample of 1000 models. Non-structural components (NSCs) were considered linear elastic in all cases. To investigate acceleration demands, a set of forty Eurocode 8 spectrum-compatible ground motion records were used as input. For linear elastic building models, it was observed that the change of demands depends on the position of the NSC (in-plan and in-height), and on the distance between CR and CM. On the other hand, for nonlinear models, additional parameters must be considered, such as the building ductility (μ) and yielding force (Vy). New regression models were proposed for quantifying the observed differences in PFAs and FRS when torsion occurs. The efficiency of the proposed models was assessed by testing the new formulas on an existing case study building, as well as on the well-known SPEAR building.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Over the last 20 years, the seismic response of non-structural components (NSCs) sensitive to accelerations was extensively studied, resulting in new practical and theoretical improvements related to the estimation and quantification of floor acceleration demands, i.e., peak floor accelerations (PFAs) and floor response (acceleration) spectra, FRS (myriads of important works are available about the topic, such as shown by Petrone et al. 2016; Perrone et al. 2019; O’Reilly and Calvi 2021). In general, as summarized in NIST (2017, 2018), the parameters influencing the NSC demands are (1) ground motion properties, e.g., shaking intensity, which also influence other topics related to the effect of earthquakes on buildings (see for example O’Reilly and Calvi 2020; Li and Gardoni 2023; Li and Formisano 2023; Li 2024, which report information about the definition of the seismic demand for the purpose of large-scale vulnerability analysis); (2) building properties (force resisting system, natural periods, ductility, damping, plan and vertical regularities, and floor and roof flexibility); (3) NSC properties (location within the building, natural period, ductility, damping, and overstrength). Some of the above parameters influence the demands more than others. For example, when it comes to PFAs, building properties are of main importance, whereas when it comes to FRS peaks, the NSC ductility and damping are by far the most influential. Furthermore, some of the parameters can be studied more or less easily, whereas some are quite complicated, such as floor and roof flexibility, which were recently studied and quantified by the authors (see Ruggieri and Vukobratović 2023), and the plan and vertical regularities. The latter are practically related to the torsional effects, whose influence on the NSC acceleration demands represents the main topic of this paper.
Elastic torsional response is basically obtained when the centres of mass (CM) and rigidity (CR) do not coincide, which can be due to an asymmetric distribution of mass, or due to an asymmetric layout of load resisting structural elements (e.g., Bhasker and Menon 2022). On the other hand, when considering seismic actions, other sources of torsion exist, such as the spatial components of ground motion records (e.g., Tena-Colunga 2021), or accidental eccentricities due to uncertainties in the building (e.g., Basu and Giri 2015). The definition of effects provided by torsion in buildings exposed to seismic actions was always attractive for the scientific community, as can be seen from some state-of-the-art papers (e.g., Anagnostopoulos et al. 2015), which outlined several important achievements to account for this effect in the new generation design, as well as for a reliable assessment of existing structures (e.g., Peruš and Fajfar 2005; Pettinga et al. 2007; Bosco et al. 2012; Poursha et al. 2014; Kaatsız and Sucuoğlu 2023).
When it comes to NSC acceleration demands, the influence of torsion was rarely considered in the studies of PFAs and FRS, although torsional effects on buildings were widely investigated when referring to other aspects (e.g., estimate of economic losses in buildings, O’Reilly et al. 2017). By looking at the cases where PFAs and FRS were assessed through data retrieved from instrumented buildings, in an early study, Çelebi et al. (1991) monitored a triangular-shaped tall building in Los Angeles, CA, through a system of accelerometers. Based on recorded data, the authors identified the effects of higher modes and irregularity, as well as the ones resulting from the differences in the locations of CRs at the floors. The study of FRS at different storeys showed interesting peculiarities attributed to the torsional acceleration. Taghavi and Miranda (2005), with the purpose of testing the proposed approximate method for the estimation of floor acceleration demands in multi-storey buildings (Miranda and Taghavi 2005), investigated the behaviour of four instrumented existing buildings, of which two had irregular plans. The results showed that the proposed methodology was able to capture the analytical PFAs, also in the irregular cases. Assi et al. (2019) investigated the PFA amplification in two numerical models calibrated on an instrumented torsionally irregular six-storey building in Montreal, Canada. The two models reflected two different construction stages of the building, i.e., the bare frame and the infilled frame configurations. The authors used a set of twelve ground motion records to investigate PFAs, and they concluded that the obtained amplification was higher than the one estimated through the code, as well as that of the bare frame had higher amplification than the infilled one. Anajafi and Medina (2019) examined 59 instrumented buildings, and the effects of floor flexibility and torsion were considered in detail. Regarding the latter, the authors proposed an amplification factor termed \({\gamma }_{Torsion}^{PFA}\), to evaluate the PFA amplification, expressed through the ratio between the maximum recorded PFAs and the average values observed at the building sides. The results, in terms of \({\gamma }_{Torsion}^{PFA}\), showed that for single-storey buildings the amplification ranged between 1 and 1.25, while for multi-storey buildings it tends to increase. FRS were also evaluated, showing an amplified peak response at the roof in cases of more irregular buildings. Degli Abbati et al. (2022) performed a validation of the previously proposed formulation (Degli Abbati et al. 2018), by considering two instrumented unreinforced masonry buildings, and the data obtained during the 2016/2017 Central Italy Earthquake. Both buildings had an irregular layout and non-negligible higher modes. Numerical models were calibrated, and recordings from different main shocks and minor events were used to compare analytical FRS with the ones obtained by applying the method previously proposed by the authors. It was concluded that the methodology provided in Eurocode 8 (2004) was not able to predict FRS in cases in which there are structural nonlinearities, as well as the effects of higher modes and torsion exist.
Considering experimental studies, Mohammed et al. (2008) carried out an experimental program to assess the seismic performance of systems made by primary and secondary elements and characterized by mass and stiffness eccentricity. With the aim of estimating the floor seismic response of the tested eccentric systems, the authors showed that the torsional yielding of the primary systems played a crucial role on the response of the secondary ones, and that the location of the latter could substantially affect the amplification of the FRS peaks.
As clear from above, there are not many torsion-related studies based on the data from instrumented and experimentally examined buildings. On the other hand, the most common studies are the numerical ones, where authors attempted to correlate irregularity sources to PFAs and FRS. Aldeka et al. (2014) investigated the effects of torsion on NSCs acceleration demands with the aim to compare the results with the ones from the Eurocode 8 approach. The reference building was the SPEAR building (Negro et al. 2004; Rozman and Fajfar 2009), although two groups of buildings were investigated. The first one consisted of four buildings designed with different properties (the reference one was designed only for gravity loads, while the other ones were designed according to the new code provisions with an increasing seismic demand). The second group consisted of five buildings with different heights (up to 45 m). The NSCs periods were varied in a discrete way, by comparing them with specific periods where FRS peaks occurred. The results were formed by looking at the more flexible parts of irregular buildings, and it was concluded that most of the amplification took place where displacements were large. In addition, the authors showed the variation of accelerations along the height, pointing out the influence of higher modes. Finally, the authors defined a torsional factor, FT, as the ratio between the PFAs at the most flexible point to the acceleration at the CR, providing a direct relationship with the floor rotation. Later, Aldeka et al. (2015) investigated the numerical results in terms of PFAs obtained by more than 2000 nonlinear time-history (TH) analyses performed on a set of simple buildings in which the stiffness of structural elements was modified in order to obtain an increased eccentricity. The results were provided in terms of eccentricity ratios, and the authors provided an analogous relation to Aldeka et al. (2014), but by relating FT to a new parameter dependent on the floor angular acceleration. Still, they provided a formula to account for the NSC damping. Afterwards, Aldeka et al. (2022) proposed a new code-based approach for accounting torsional irregularity. Namely, the authors investigated 33 new buildings considered within 5000 nonlinear TH analyses, where some parameters were varied, such as the plan layout, seismic capacity, fundamental vibration period, total height, floor rotation, ground type, and eccentricity ratio. The outcome of the study was a modified Eurocode 8 formulation, which included the proposed FT. Surana et al. (2018) investigated in-height irregularities, by quantifying the differences in terms of PFAs and FRS through some case studies, and by comparing the above quantities computed according to several code approaches (Eurocode 8 2004; FEMA P750 2009; ASCE 7 2010) and numerical simulations. The authors defined a new torsional amplification factor, termed TAF, to account for the amplification of FRS peaks. Jain and Surana (2022) extended the previous study, by considering new numerical models with irregularity both in-plan and in-height, and they proposed a new version of the TAF which was obtained through regression models. Lange and Ingle (2021) performed a study on bi-dimensional models having in-height irregularities. By performing several nonlinear TH analyses on the selected models, the authors concluded that the consideration of nonlinearities in buildings reduced PFAs, whereas the mass and stiffness irregularities amplified them. Lange and Ingle (2022) investigated the multidirectional FRS variation given by mass eccentricity, by considering three RC buildings, with three storeys and different configurations of mass eccentricity. Eleven ground motion records were used for the investigation, and the results showed that the mass variation increased the FRS values. In addition, the authors examined the accuracy of the IS 1893 (Part 4) (2015) provisions and found that FRS in the case of torsion are underestimated.
The aim of this paper is to contribute to the state-of-the-art on PFAs and FRS, by considering the influence of torsion in a different way than it was done in the existing literature. For this purpose, a set of eight archetype low-rise (two-storey) RC buildings were selected, according to the approach by Ruggieri and Uva (2020). The sample is characterized by geometrically similar structures, but with an increasing floor eccentricity, defined as distance between the CM and CR, achieved by moving the latter. PFAs and FRS at all nodes of the structures were determined and elaborated, after performing both linear and nonlinear TH analyses, in order to define the evolution of the investigated quantities due to the variation of the in-plan irregularity. In nonlinear models, the parameters of plastic hinges were systematically changed to increase the available sample to up to 1000 models, and then to simulate the large range of possibilities where torsion occurs. By elaborating the obtained data, and by considering the presence of different independent variables, new empirical formulations were derived to optimize the quantification of PFA and FRS differences. The paper is organized as follows: the properties of the initial set of archetype buildings, linear and nonlinear modelling assumptions, and the seismic input are presented in Sect. 2; PFAs are reported in Sect. 3; FRS are presented and discussed in Sect. 4; the validation of the proposed formulas on a case study example is provided in Sect. 5; and conclusions are provided in Sect. 6, which is followed by the references.
2 Archetype buildings, modelling, and seismic input
2.1 Sample definition
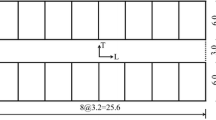
To investigate the effect of torsion on PFAs and FRS, the basic set of buildings consisted of eight low-rise (two-storey) archetype RC buildings analysed in Ruggieri and Uva (2020). The buildings were designed for the same seismic demand and the entire sample was set to present increasing plan irregularity. In detail, a reference model (BREG) was designed according to the Italian Building Code (NTC18 2018) with the “Low” ductility class. BREG is characterized by plan regularity, having the dimension of 9 m in X direction and 10 m in Y direction (see reference system X-Y-Z in Fig. 1). Two bays were set in both main horizontal directions and two storeys were considered with a height of 3 m. For the considered archetype model, the effect of staircase was neglected, with the aims to make the reference model as simple as possible for further analyses, and to avoid introducing additional sources of irregularity. Used structural materials were concrete C28/35 (cubic compression strength equal to 35 MPa) and steel reinforcement B450C (tensile yielding strength equal to 450 MPa). Gravity loads (both dead and live) were considered as suggested by NTC18 (2018), while seismic actions were considered by using a medium-intensity spectrum and a behaviour factor equal to 3.9. At the same time, gravity loads, and the dimension of structural elements were set in order to match both the CM and CR with the structural geometric centre of gravity. After performing the response spectrum analysis, the maximum stresses were used to define steel reinforcement in beams and columns. For BREG, side beams have a section of 30 × 40 cm reinforced at the top and bottom with 5Φ16, central beams are characterized by a section of 40 × 25 cm reinforced at the top and bottom with 6Φ16, while columns are 30 × 50 cm, and they have steel reinforcement of 4 + 4Φ16 per direction. Based on the design of BREG, other archetype models were generated by modifying the cross section of the column No. 6 (see Fig. 1), which was gradually varied in order to change the participating mass in the Y direction, whereas the initial modal parameters were retained in X direction. In detail, the size of the cross-section of the column No. 6 (for both storeys) was retained in the X direction, and it was increased in Y direction, symmetrically to the bay-centre axis. This operation resulted in two main effects: (a) the CR was moved away from the CM along the X direction by keeping the fixed position of the CM; (b) the participating masses for the modes in the X direction were kept equal for all models, while the ones in the Y direction and around the Z axis were changed, governing the increase of the column No. 6 size so that the 5% reduction of the participating mass is obtained for each numerical model. In this way, the set of archetype buildings was designed to couple vibration modes in the Y direction and around the Z axis, and to have an increasing in-plan torsion. Besides BREG, other models were denoted as B75, B70, B65, B60, B55, B50, B45, where the subscripts indicate the participating mass of the main vibration mode in the Y direction of the linear elastic building models. Figure 1 shows the typical structural plan configuration with the indication of how the CR moves with the increment of the column No. 6, and the schematic two-dimensional view. Although specific details of the element cross-sections and steel reinforcement (for all buildings) are not reported here for the sake of brevity, they can be found in the paper by Ruggieri and Uva (2020). Table 1 shows the modal parameters of all archetype buildings, i.e., the first three periods of vibration and the related participating masses.

Structural layout of the archetype RC low-rise buildings and indication of the CR variation with respect to the CM position, according to Ruggieri and Uva (2020); the columns are numbered, where the varied column is the column No. 6, and the CM coincides with the column No. 5
As can be seen from Table 1, all the archetype models can be defined as torsionally stiff, considering that translational periods are always lower than the rotational one (or the ratio between torsional and translational frequencies is always higher than 1), even though there is an inversion of the modes between X and Y by increasing the floor eccentricity. The results shown in Table 1 were obtained by considering linear elastic archetype buildings. For the case at hand, buildings were modelled by using the OpenSees software (McKenna 2011), where both beams and columns were modelled with the elasticBeamColumn elements. Columns were fixed to the ground by using external restraints, and rigid diaphragms were modelled at each floor. Later, the same numerical models were reproduced by considering structural nonlinearities. Structural elements were modelled with beamWithHinges elements, i.e., a lumped plasticity approach was used. Each plastic hinge, placed in the extreme section of each frame element, was assembled through the Pinching4 material, accounting for the deterioration as suggested by Ibarra et al. (2005). A moment-rotation constitutive law was defined for all plastic hinges, according to the prescriptions provided by the Italian building code (NTC18 2018), which is in agreement with the one provided by Eurocode 8-Part 3 (2005). In detail, a quadrilinear constitutive law was considered, constituted by a first branch simulating the concrete cracking, a hardening branch indicating the yielding of the longitudinal steel reinforcement, a softening branch corresponding to the strength degradation of the section, and a final residual moment, assumed as 20% of the yielding moment. Both for columns and beams, only bending mechanisms were considered, and for columns a constant axial stress was assumed, according to the seismic combination of loads. It is worth noting that the assumption of neglecting brittle failures (e.g., shear) in the modelling was due to two main reasons: (a) the reference building was designed as a new structure and, accordingly, capacity design principles were accounted for; (b) the introduced modifications in terms of nonlinearities (see later) allowed us to cover a large range of structural behaviour scenarios (from low- to high- strength/ductile), which include the occurrence of brittle failures when seismic actions are considered. To account for the bi-directional behaviour, constitutive law of the column was computed for both main directions and modelled through the sectionAggregator option. On the other hand, plastic hinges in beams were defined as monodirectional. Brittle mechanisms and node failures were neglected in order to avoid the addition of other variables to the problem under investigation.
An additional aspect taken into account is related to the column No. 6. Considering the variation of the cross section in the Y direction, the nonlinear behaviour in the X direction remained unchanged, while the constitutive law in the Y direction had the ascending overstrength increment and the descending ductility reduction (the variation of moment-rotation law of the column No. 6 in the Y direction is shown in Ruggieri and Uva 2020). Anyway, for this study, the latter aspect was not very important, because the main aim of the work is to perform a parametric study of the nonlinear RC archetype models accounting for the presence of torsion. For this purpose, the constitutive laws of the plastic hinges in structural elements were systematically changed by applying fixed scale factors (SFs) to the following parameters: (a) the variation of the elastic branch length; (b) the variation of the hardening branch length; (c) the variation of the softening branch length. Slopes of the hinge branches (stiffness) were not varied, but only the values of the yielding point and of the ultimate point (both the moment and the rotation) were changed. In this way, two main parameters characterizing the nonlinear behaviour of the models were changed, i.e., the yielding force (Vy) and the ductility (µ) of the system. The adopted SFs were set to 0.1, 0.5, 1, 1.5, 2. This means that by systematically combining the five values of SFs with the three modified branch and eight basic models, the resulting number of models is equal to one thousand. It is worth noting that the selection of SF values has no physical justification, especially when considering the influence of modifications introduced on hysteretic parameters. On the other hand, this limit is certainly balanced by the expected results, where several structural behaviour scenarios under seismic loads can be simulated, covering a wide range of new and existing buildings, going from high- to low- strength/ductility low-rise systems. Figure 2 shows the applied linear elastic and lumped plasticity modelling approaches. In addition, the schematization of the varied constitutive laws is provided. It is also worth mentioning that the generated sample of models allows to retain the torsional effects included in the original design of the archetype buildings (the elastic stiffness in both main directions is unchanged) and, at the same time, the adopted approach allows to considered structures with different nonlinear behaviour (i.e., the simulation of low- and high- strength ductility systems).

Adopted linear elastic and lumped plasticity (rotational springs) modelling approaches, and the variation of the constitutive law for the nonlinear models
2.2 Seismic input
The considered seismic input consisted of 40 ground motion records, selected form the European-Strong-Motion-Database (Ambraseys et al. 2002), which include data from real earthquake events occurred in the European-Mediterranean and the Middle East regions, having magnitude greater than or equal to 4.0. Considering that no strict code-imposed rule is provided by Eurocode 8 regarding the earthquake nature, the selection was performed by using records well-below and well-above the target spectrum. In this way, the authors considered a wider range of potential earthquakes, avoiding employing any record scaling procedure. In addition, omitting the record-scaling option is also justified by the use of code-based spectra for both analysis and design, and the latter is beyond the scope of the paper. The selection was made with the respect to the Eurocode 8 (2004) provisions, considering that the limit differences between mean and target spectra amounted to + 30% and − 10%, by using REXEL (Iervolino et al. 2010). Type 1 elastic spectrum for soil type B (soil factor equals 1.2) with ag = 0.29 g was used (resulting in the peak ground acceleration of 0.35 g). Figure 3 shows the elastic ground motion spectra for all individual records, their mean spectrum, and the target spectrum, all for 5% damping (T denotes the period, g is the acceleration of gravity). It is worth noting that the mean peak ground acceleration of the selected records amounted to 0.43 g.

Elastic acceleration spectra (Sae) of the individual ground motion records, their mean elastic spectrum, and the target Eurocode 8 spectrum (all for 5% damping)
As for the application of the seismic input, the analyses were performed only in the Y direction since it is perpendicular to the floor eccentricity. This is of particular importance for the study because it allows to study the effect of torsion on PFAs and FRS at each node of the structure, both for flexible and stiff sides, and the nodes of the central frame can be considered as well. In the end, it should be noted that selecting ground motion records according to the Eurocode 8 approach implies an input representative of a uniform hazard, which may lead to overestimated structural demands (see for example Bommer and Pinho 2006). Future investigations will aim to reduce the conservativism involved herein, by applying other record selection techniques (e.g., Baker 2011).
3 Peak floor accelerations
3.1 Assessment of PFAs in linear elastic models
All 40 records were applied on the eight linear elastic building models (320 linear TH analyses in total) and accelerations were recorded at all nodes by considering both main directions (note that the records were applied only in the Y direction). Figure 4 shows absolute acceleration time histories in the Y direction at nodes 4 and 6 at the second storey for different irregularity degrees, and for an arbitrarily selected ground motion record (that was always used for plotting time-acceleration series throughout the text). For the sake of clarity, only the relevant part of the response is shown, i.e., the part where the peaks occurred (between 2 and 6 s). It is worth remembering that when accounting for an increment of the in-plan torsion going from BREG to B45, node 4 is located on the flexible side (subjected to larger displacements when seismic action occurs), while node 6 is located on the stiff side (subjected to larger forces when seismic action occurs). As can be seen, there are differences among the recorded absolute accelerations, especially when it comes to peak values. In detail, for node 4 higher peaks were obtained for more regular models (e.g., BREG and B75), while increasing the in-plan torsion reduced the peaks (e.g., B45). Similar trend can be observed for node 6, although higher peaks were obtained for BREG, whereas for other models a decrease occurred. As expected, the obtained results suggest that the presence of torsion varies the distribution of nodal accelerations, leading to the deviations of accelerations in the main direction of loading, which can be represented with two perpendicular components in the considered main directions (i.e., X and Y). The observations related to node 4 reveal a rotation of the main direction in which the acceleration acts, and then an increasing reduction of acceleration in the Y direction and an analogous increment of acceleration in the X direction. Of interest is to observe the differences among the points of the same storey when torsion increases. Figure 5 shows this aspect for models B70 and B55 by using an arbitrarily selected ground motion record, looking at the differences in terms of acceleration in both main directions (i.e., X and Y) among nodes 7, 5, and 3 at the second storey (always considering the relevant part of the response, between 2 and 6 s). Node 7 is located on the flexible side, node 5 coincides with the CM, and node 3 is located on the stiff side.

Comparison of absolute accelerations for an arbitrarily selected ground motion record at nodes 4 (left) and 6 (right) at the second storey, accounting for all elastic archetype models and the Y direction

Comparison of absolute accelerations for an arbitrarily selected ground motion record and nodes 7, 5, and 3 at the second storey, for models B70 (left) and B55 (right), and for Y (vertical) and X (horizontal) directions
When it comes to the acceleration component in the Y direction, some differences can be observed for the considered nodes, at which for both B70 and B55 higher values were obtained at node 7, whereas the lower ones were present at node 3. On the other hand, by looking at the X direction and nodes 7 and 3, report a non-negligible component of acceleration can be seen, compared to the one in the Y direction (i.e., in terms of peaks, acceleration in the X direction amounts to around 30% of the corresponding one in the Y direction). Finally, a negligible component of acceleration in the X direction can be seen at node 5 because it stands on the straight line between the CM and CR. This result, although seems strange at first, explains a physical sense on how the archetypes and the analyses were conceived. Given a very low displacement component in the X direction of CM (i.e., node 5), a relative near-null component of acceleration was observed.
By judging the overall results, a clear trend can be established, as shown in Fig. 6, where for the seismic action perpendicular to the floor eccentricity, the nodes with the same X coordinates have the same component of acceleration in the Y direction, while the nodes with the same Y coordinates have the same component of acceleration in the X direction. Hence, when the in-plan torsion occurs, it is not possible to properly evaluate PFAs just by looking at the values recorded in the CMs (as usually occurs for regular buildings, where all nodes at a particular storey have similar accelerations), but it is necessary to establish a relationship among the PFA at CM and the PFAs at other nodes on flexible and stiff sides. With the aim to establish a relationship between the floor eccentricity (i.e., the in-plan torsion) and the variation of PFA with respect to the CM, the obtained results can be processed, also accounting for the other considered independent variables.

Acceleration components in X and Y directions, when the seismic action is applied in the Y direction (points with the same colour have same accelerations in the direction of an arrow)
To this scope, the PFA of the jth node in the Y direction (PFAY,j) can be related to the PFA at the CM for the same direction (PFACM) according to the following equation:
where RY,j is the ratio between the above quantities. It is worth noting that PFACM does not have the subscript “Y”, because its component in the X direction is quasi-null. For the same reason, the PFA of the jth node in the X direction (PFAX,j) cannot be related in the same way to the one in the CM, because the ratio gives an infinite value. Hence, the X component of acceleration can be related to the Y component through the ratio RX,j:
For the linear elastic models, values of the ratios RY,j and RX,j depend on: (a) the node position in plan; (b) the node position along the height; and (c) floor eccentricity. To address all the above independent variables, and to provide a methodology applicable to all cases, a change of the reference system was introduced. Starting from the reference system shown in Figs. 1 and 6 (X–Y-Z), the origin of the new reference system was set to the CM and, by transforming the axes X and Y to α and β, respectively, the jth node has the coordinates:
where Xj and Yj are the coordinates of the jth node in the previous reference system, αj and βj are the coordinates of the jth node in the new reference system; and LX and LY are the lengths of the sides of the structure, in X and Y directions, respectively. In this way, αj and βj are dimensionless and range from − 1 to 1. For the case at hand, the position of the CM was defined by αCM = 0 and βCM = 0, while the position of the CR was defined by αCR equal to a value ranging from 0 (BREG) and close to 1 (B45) and βCR = 0 (for the exact position of the CRs of the archetype models, see Ruggieri and Uva 2020). According to the definition of floor eccentricity, the new reference system includes the normalized floor eccentricity, which is assumed always positive, and defined as
As for the third axis of the reference system, the Z axis was changed to the γ axis, where the jth node has the following coordinate:
where γj is the coordinate of the jth node in the new reference system, Zj is the coordinate of the jth node in the initial reference system, and HTOT is the total height of the structure. In this way, γj was dimensionless and ranged from 0 to 1. For the case at hand, the position of the nodes led to γj values equal to 0.5 (first storey) and 1 (second storey).
Using the new reference system, the values of RY and RX can be displayed as a function of the αCR, in order to assess the variation of PFAs depending on the increment of in-plan torsion, as reported in Figs. 7 and 8. It is worth specifying that, for simplicity, all results presented in the manuscript were reported in bi-dimensional graphs (as in Figs. 7 and 8), but in all cases more than one independent variable governs the investigated problems and then, a space to more dimensions should be necessary. Coming back to the results, both in Figs. 7 and 8, eight vertical stripes are given, which show the values of αCR from 0 to 0.834, as well as for all considered linear elastic models (ranging from BREG to B45). In detail, Fig. 7 shows the values of RY for the first (γj = 0.5) and second (γj = 1) storeys, for points on the flexible (αj = − 1) and stiff (αj = 1) sides, considering all ground motion records and the corresponding means (points having αj = αCM are not presented because for them RY = 1). Analogously, Fig. 8 shows the values of RX for the first (γj = 0.5) and second (γj = 1) storeys, for points at βj = − 1 and βj = 1, considering all ground motion records and the corresponding means (points having βj = βCM are not presented because they have infinite RX values).

Values of RY for the linear elastic models, at the first (γ = 0.5) and second (γj = 1) storeys, for points on the flexible (αj = − 1) and stiff (αj = 1) sides and their corresponding means, considering all ground motion records

Values of RX for the linear elastic models, at the first (γj = 0.5) and second (γj = 1) storeys, for points on the flexible (βj = − 1) and stiff (βj = 1) sides and their corresponding means, considering all ground motion records
Observing the obtained mean results (black dots), some aspects can be highlighted. First, the values of RY and RX for BREG are equal to 1 and 0, respectively. Second, the values of Ry generally increased at the nodes on the flexible side, while different outcome was observed at the nodes on the stiff side, whereas in many cases the decrease can be observed (RY lower than 1). Still, despite the PFAs at the first storey were lower than the ones at the second storey (not graphically reported, but as expected in low-rise buildings), RY values at the first storey were generally larger than the ones at the second storey, especially on the flexible side. When it comes to RX values, an increase, following the floor eccentricity increase, was observed in all cases. For model B45 and γj = 0.5, and βj = 1, the RX value exceeded the RY.
In order to summarize the above results, regression models were elaborated for each specific node, by covering the extreme possibilities of amplification and by taking into account both main directions (αj = − 1 and αj = 1 for RY, βj = − 1 and βj = 1 for RX). The empirical models were set in order to relate mean values of RX and RY to the normalized floor eccentricity (αCR) and the height of the nodes (γj), considered as the main independent variables. Assuming a linear variation for RY by increasing the height (decrement), and a quadratic variation by increasing the floor eccentricity (as can be observed in Fig. 7), the following polynomial model can be computed:
On the other hand, a linear variation was assumed for RX by increasing the height and the floor eccentricity (as can be observed in Fig. 8) can be considered, and the following model can be established:
where the coefficients c1, c2, c3, c4, d1, d2, and d3 are the coefficients defining the regression models. Table 2 shows the obtained results for all coefficients, and the corresponding coefficients of determination (R2). Figure 9 shows the capacity of the developed models to predict the observed results (red line indicates the optimal prediction, while scattered points indicate capacity of models in terms of prediction).

Observations vs predictions for the proposed regression models of RX and RY
As observed, the proposed regression models predicted the observations fairly well, even though the model for RY on the stiff side has a lower accuracy than the others. Still, it is worth nothing that models with better prediction could be obtained for RX by using a quadratic variation of αCR, but the advantages of the model defined by Eq. (7) are evident: (i) it is intuitive and easy to use; (ii) the values of R2 are large enough to accept the obtained results. In the end, it is worth noting that, as expected, c1 and d1 are equal to 1 and 0 for RY and RX, respectively.
3.2 Assessment of PFAs in nonlinear models
Following the procedure reported in Sect. 3.1, similar outcomes can be provided when structural nonlinearities are taken into account. Nevertheless, some important aspects should be pointed out, considering the main differences between linear elastic and nonlinear models. First, when nonlinearities are present, the information about numerical models is not complete if the yielding force, Vy, and the ductility, µ, are not specified. In fact, these two parameters cover fundamental importance to express the transition in the post-elastic field and the behaviour of the structure after the yielding. Second, while in the linear elastic field the X and Y components of the acceleration can be separately investigated and combined afterwards, in the nonlinear field this is not possible although the effect of the in-plan torsion on PFAs is the same (e.g., the generation of two acceleration components). To support the above observations and, according to the generation of the sample of nonlinear models introduced in Sect. 2.1 (i.e., modification of the plastic hinge parameters with SFs), 1000 archetype models were generated, and all 40 records were applied in the Y direction (for a total of 40,000 nonlinear TH analyses). Figure 10 presents an output analogous to the one reported in Fig. 4, showing the acceleration histories in the Y direction of nodes 4 (flexible side) and 6 (stiff side) at the second storey by varying the irregularity degree, for an arbitrarily selected ground motion record, and by assuming a value of SFs equal to 1 (i.e., like for the linear elastic models, but with unmodified nonlinearities). The results show that for both nodes (4 and 6), higher peaks were not recorded for model BREG, but this depends on the occurrence of plasticization, which can take place in different times. In fact, the absolute peaks were not observed at the same time for all models (as happened in linear elastic cases), but a variation was observed. Still, the main difference from the linear elastic cases resided in the differences of peaks among the models, which was not as evident as expected. This means that the nonlinearities attenuated the effects of the in-plan torsion on PFAs, making the numerical regression proposed in Sect. 3.1 inappropriate.

Comparison of absolute accelerations for an arbitrarily selected ground motion record at nodes 4 (left) and 6 (right) at the second storey, using SFs = 1, accounting for all nonlinear archetype models, and the Y direction
Additional observations can be made, by considering the influence of the SF variation on the plastic hinge constitutive laws, and then on the Vy and µ. Figure 11 shows the accelerations histories between 2 and 6 s in both main directions (i.e., X and Y) for the model B65 considering different SF values (i.e., 0.5, 1, 1.5, applied on the length of the elastic, hardening and softening branches), and for the nodes 7, 5, and 3 at the second storey. Hence, the results on three different systems with different Vy and µ can be observed (when SF = 0.5, Vy and µ are lower than for SF = 1, while when SF = 1.5, Vy and µ are higher than for SF = 1.0). Analogously to the linear elastic cases, some differences can be observed among nodes 3, 5, and 7 when considering acceleration in the Y direction. Also, considering the X direction, acceleration components achieved the 30% of the corresponding acceleration in Y direction, with a negligible component for node 5. Here, a comparison among nonlinear models having different degrees of strength and ductility is of interest. As a matter of fact, the model with higher SF (dotted lines) has higher acceleration peaks, which implies higher values of PFAs (see, for example, the difference among peaks of node 3, Y direction, around 3.5 s, Fig. 11 left).

Comparison of absolute accelerations for an arbitrarily selected ground motion record and nodes 7, 5, and 3 at the second storey, for model B65, using different SFs on the plastic hinge constitutive laws (0.5—dashed lines, 1.0—continuous lines, 1.5—dotted lines), and for Y (vertical) and X (horizontal) directions
Overall, the results obtained for nonlinear cases show similar trends as the ones for the elastic cases, although lower amplification effects occurred. Therefore, the approach used in Sect. 3.1 was once again applied (i.e., a relationship between the floor eccentricity and the variation of the PFA with respect to the CM for the Y direction was established, and acceleration in the X direction were expressed as a quote of the one in the Y direction). However, other independent variables were included, i.e., Vy and µ (parameters that were intrinsically varied by applying the SFs to the plastic hinge constitutive laws). To retrieve these new parameters (characteristic for the global seismic behaviour of each considered structure), from each unit of the sample of generated archetype buildings, a pushover analysis approach was applied. Thus, each archetype building was investigated through a pushover analysis in the Y direction and Vy and µ were computed on the equivalent single-degree-of-freedom systems (ESDoFs). As rule of thumb, pushover analysis can be performed on a structure by using a uniform load profile, ESDoFs can be derived by scaling capacity curves through the coefficient of participating mass and by bilinearizing the curves according to the Eurocode 8 (2004) approach. Hence, Vy can be directly derived as the maximum shear, and µ can be computed as ratio between ultimate and yielding displacements of the bilinear curves. It is worth noting that the proposed approach is practice-oriented, where users can establish Vy and µ based on the pushover analysis, and then to estimate the variation of PFAs for the desired node, in terms of RX and RY. The approach represents a practical way to investigate PFA (de)amplifications in the considered direction, as common when the seismic assessment of existing buildings is performed.
Following the proposed approach, Fig. 12 shows the pushover curves in the Y direction for the archetype buildings (left) and bilinear idealization curves for the ESDoFs (right), where the horizontal displacement is indicated as d and is expressed in meters, while the base shear, indicated as Vb, is reported in dimensionless terms, by employing the weight of the buildings, W. From the pushover curves, it is possible to see the effect of the five SF values, where from the linear elastic field five different spindles of pushover curves were developed. Same observation can be provided in the post-elastic field, especially for the length of the hardening branch and the slope of the softening branch. In addition, it is worth noting that, as designed, the application of the SFs to the plastic hinge constitutive laws does not vary the elastic stiffness of the buildings. Looking at the bilinear curves for the ESDoFs, the parameters of Vy (expressed in terms of the normalized yielding force, Vy/W) and µ can be easily derived, where Vy/W ranged from 0.18 to 0.55 (with some cases having values lower than 0.1), and µ ranged from 1 to around 35 (in some the response remained linear elastic).

Pushover curves in the Y direction for the sample of archetype buildings (left), and the bilinear idealization curves for the ESDoFs (right) obtained by applying the Eurocode 8 (2004) approach
Using the reference system described in Sect. 3.1, the values of RY,NL and RX,NL can be displayed as functions of the αCR (eight vertical stripes, one for each archetype model). Figure 13 shows the values of RY,NL for the first (γj = 0.5) and second (γj = 1) storeys, for points on the flexible (αj = − 1) and stiff (αj = 1) sides, considering all ground motion records and the corresponding means (also in this case points having αj = αCM are not reported because they present RY = 1). Instead, Fig. 14 reports values of RX,NL for the first (γj = 0.5) and second (γj = 1) storeys, for points at βj = − 1 and βj = 1, considering all ground motion records and the corresponding means (also in this case, points having βj = βCM are not reported because they have infinite RX values).

Values of RY,NL for the nonlinear models, at the first (γj = 0.5) and second (γj = 1) storeys, for points on the flexible (αj = − 1) and stiff (αj = 1) sides and their corresponding means, considering all ground motion records

Values of RX,NL for the nonlinear models, at the first (γj = 0.5) and second (γj = 1) storeys, for points on the flexible (βj = − 1) and stiff (βj = 1) sides and their corresponding means, considering all ground motion records
Analogously to the linear elastic cases, the values of RY,NL and RX,NL for BREG are equal to 1 and 0, respectively. In the Y direction, larger amplifications were obtained at nodes on the flexible side, while somewhat smaller were observed at nodes on the stiff side. Overall, comparing the results among linear elastic and nonlinear cases, lower effects were observed in nonlinear cases, where the maximum amplification was around 20% at nodes on the flexible side, and around 10% at nodes on the stiff side. Thus, in general, the RY,NL values at the first and second storeys were similar. Regarding the X direction, the RX,NL values at the first storey were overall larger than the ones at second storey, with percentages ranging from 40 to 60% of the related Y component. The results indicate that by increasing the floor eccentricity no significant change of the RY,NL and RX,NL values was observed (means are on the same, approximately horizontal branch). This implies that nonlinear behaviour strongly reduces the torsional effects. This outcome can be also observed by looking the dispersion of the black dots (i.e., means) in Figs. 13 and 14, where for different levels of µ and Vy/W the RY,NL and RX,NL values do not show large sensitivity to the variation of αCR.
Based on the obtained results, for nonlinear buildings new regression models were established for each specific node, as was done for linear elastic buildings (the same fitting models were used). Note however that the new quantities, characterizing the nonlinear behaviour (µ and Vy/W) were taken into account. Considering that all quantities in play were dimensionless and, in order to uniform the values of µ to the other variables (i.e., the values ranging from 0 to 1), Eqs. (6) and (7) were re-written as:
where the coefficients e1, e2, e3, e4, e5, e6, f1, f2, f3, f4, and f5 are the coefficients defining the new regression models. Table 3 shows the obtained results for all coefficients and the corresponding R2. Figure 15 shows the capacity of the developed models to predict the observed results (red line indicates the optimal prediction, while scattered points indicate the capacity of models in terms of prediction).

Observations vs predictions for the proposed regression models of RX,NL and RY,NL
As in linear elastic cases, the proposed regression models provided fairly good predictions, with the R2 values of 0.7 to 0.8. The model for RY,NL on the stiff side again has a lower accuracy than the others. It is worth noting that the last two graphs of Fig. 15 report some outliers (red dots), which show much higher predicted values than the observed ones. These points were derived from models developed from the regular configuration of the archetype (i.e., βREG), which implies that the proposed formulations, in some cases, overestimate the values of RX,NL. On one hand, this represents a limit for the proposed formulations, but on the other hand, the formulations are unnecessary for regular structures, as they were defined for cases in which the in-plan torsion occurs.
4 Floor response spectra
4.1 Torsional effects on FRS in linear elastic cases
To assess the effects of in-plan torsion on FRS, a linear elastic single-degree-of-freedom (SDOF) oscillator was considered for simulating a linear elastic NSC model. Mass and stiffness of the NSC model were varied in order to obtain NSC periods between 0 s and 4.0 s. In addition, 5% damping of NSCs was assumed in all cases. First, FRS were computed for linear elastic structures, by considering the mean of the 40 records, and by taking into account the results for all nodes, only in the Y direction. It is worth noting that, although acceleration components existed in the X direction, FRS were not considered, for two main reasons: (a) it is more interesting to observe the torsional effects on FRS in the direction of loading, without prejudice that FRS in the other direction can be influenced by the additional acceleration component generated by the in-plan torsion (see Sect. 3.1); (b) in practice, FRS are commonly determined separately for each main direction. As for the PFA, for FRS the reference scheme reported in Fig. 6 was used, where the nodes with the same X coordinates had the same FRS in the Y direction, while the nodes with the same Y coordinates had the same FRS in the X direction. The obtained results for first and second storeys are shown in Fig. 16 (in the range of period, T, from 0 to 1 s), where black lines correspond to FRS at the nodes coinciding with the CM position (i.e., nodes 2, 5, 8), blue lines indicate FRS at the nodes on the flexible side (i.e., nodes 1, 4, 7), whereas red lines indicate FRS at the nodes on the stiff side (i.e., nodes 3, 6, 9).

Mean FRS for linear elastic structural models in the Y direction, considering 1st (left) and 2nd (right) storeys, nodes coinciding with the CM position (black lines), flexible (blue lines) and stiff (red lines) sides
First, as expected, peaks at the second storey are higher than the ones at the first storey. Second, at the first storey peaks corresponding to the second structural mode can be observed, confirming the importance of higher mode effects in FRS determination. The effect of torsion is obvious through several outcomes. Starting from the regular building configuration (BREG), in which FRS at all storey nodes are the same, by increasing the floor eccentricity a gradual reduction of peaks was observed for nodes coinciding with the CM position, with a decrement ranging from 20% (for B75) to 50% (for B45), and this is valid for both storeys. Also, a slight variation of the resonance position from the regular case was observed, which increased when higher torsion was imposed. Looking at the flexible side, a slight variation of the peak amplitudes can be observed, noting that both amplification and deamplification are present. In addition, a slight resonance period change, compared to the regular building case, was observed, which increased with the increase in torsion. When it comes to the stiff side, some small to moderate changes of both peak amplitudes and resonance periods can be seen.
By analysing the obtained results from the practical point of view, in very few cases the BREG FRS were exceeded (nodes on flexible side for B75, B70, B65), making the efforts to investigate the differences from the regular configuration senseless. Instead, the differences among the nodes of the torsional archetype models are of interest, by defining them in terms of peak amplitudes and resonance periods of FRS from the CM to the peripheral nodes. With this goal in mind, two new ratios can be defined. Namely, PY is the ratio of peaks amplitude among nodes belonging to the sides (i.e., flexible and stiff) and CM, while SY is the ratio of resonance periods among nodes belonging to the sides (i.e., flexible and stiff) and CM, which are, respectively, defined as follows:
where SeY,j and Se,CM are the acceleration values at the peaks of FRS in the Y direction at the jth node and at the CM, respectively; and TRZY,j and TRZY,CM are the first mode resonance periods of FRS in the Y direction at the jth node and at the CM, respectively. It is worth pointing out that both PY and SY are referred to the main vibration mode of the structure in the considered direction.
For the linear elastic cases, the values of PY and SY are reported in Fig. 17 versus the value of αCR (in the new reference system), differentiating nodes of the flexible (dark and light blue dots) and stiff (red and violet dots) sides, and first (light blue and violet dots) and second (dark blue and red dots) storeys. Regarding the PY, nodes on the flexible side follow an increasing trend, while nodes on the stiff side, except for B75, generally follow the same trend, but show some discrepancies between storeys. As for the SY, nodes on flexible side have, for both storeys, the resonance periods corresponding to the one at CM, while for nodes on stiff side present a gradual decrease can be seen.

Values of PY and SY for the linear elastic structural models, considering the nodes on the flexible (dark and light blue dots) and stiff (red and violet dots) sides, and first (light blue and violet dots) and second (dark blue and red dots) storeys
In order to quantify the outcomes shown in Fig. 17, regression models were proposed for PY and SY, by relating them with the normalized floor eccentricity, αCR, and the height of the nodes, γj. Regarding the PY, a similar approach to the one used in Sects. 3.1 and 3.2 was applied, by imposing a linear variation with height, and a quadratic variation with αCR, for nodes on both flexible and stiff sides:
On the other hand, for SY, a linear relationship can be established for nodes on the stiff side, while it was not necessary to define a regression model for nodes on the flexible side, because no resonance period shift was observed. (SY nearly equal to 1 for all values of αCR):
In Eqs. (12) and (13), g1, g2, g3, g4, h1, h2, and h3 are the coefficients defining the proposed regression models. Table 4 shows the obtained results for all coefficients and the values of R2. The high values of the latter parameter confirmed the suitability of the proposed models and, for this reason and for the sake of synthesis, graphical representation of a comparison among predicted and observed values was omitted.
4.2 Torsional effects on FRS in nonlinear cases
According to the results reported in Sect. 4.1, a similar analysis procedure was conducted for the nonlinear archetype buildings, in order to assess the torsional effects on FRS when structural nonlinearities are considered. Using the results obtained from the nonlinear TH analyses, the mean FRS in the Y direction were computed, considering all nodes on both flexible and stiff sides. Figure 18 reports the obtained results for first and second storeys, where black lines indicate FRS at the nodes coincident with the CM position (i.e., nodes 2, 5, 8), blue lines indicate FRS at the nodes on the flexible side (i.e., nodes 1, 4, 7), and red lines indicate FRS at the nodes on the stiff side (i.e., nodes 3, 6, 9).

Mean FRS for nonlinear models in the Y direction, considering 1st (left) and 2nd (right) storeys, nodes coinciding with the CM position (black lines), flexible (blue lines) and stiff (red lines) sides
As for the elastic cases, peak amplitudes at the second storey were higher than the ones at the first storey, even though, as expected, inelastic FRS have lower values of peaks compared to elastic FRS. Although the results are less interpretable than the elastic ones (on each graph of Fig. 18, 3000 FRS are shown), several observations can be made. First, both graphs show two main peaks. The graph corresponding to the second storey (Fig. 18, right) has higher peaks at the period near the fundamental vibration mode in the Y direction, while the graph corresponding to the first storey (Fig. 18, left) has higher peaks near the period of the second vibration mode.
The effect of the torsion can be distinguished. Namely, for the regular archetype models overlapping of FRS can be observed for all nodes, while by increasing the floor eccentricity, a divergence of FRS was obtained, reflected through moving among stiff and flexible sides, in terms of peaks and resonance periods. For example, looking at FRS at the second storey, higher peaks were obtained at nodes on the flexible side, while the lower peaks were obtained at nodes on the stiff side. Also in this case, a slight resonance period shift was observed, especially from the irregular cases. Nevertheless, a clear trend for each mode cannot be easily traced, considering the dependence in the problem on additional parameters, i.e., µ and Vy.
Following the approach in Sect. 4.1, and referring to the fundamental vibration mode peak, differences in terms of peaks and resonance periods of FRS from the CM to the peripheral nodes can be defined through the above defined ratios, which in nonlinear field were defined as PY,NL and SY,NL. Analogously to the linear elastic cases, Fig. 19 presents the values of PY,NL and SY,NL versus αCR, differentiating nodes on the flexible (dark blue and light blue dots) and stiff (red and violet dots) sides, and first (light blue and violet dots) and second (dark blue and red dots) storeys.

Values of PY,NL and SY,NL for nonlinear structural models, considering the nodes on the flexible (dark blue and light blue dots) and stiff (red and violet dots) sides, and first (light blue and violet dots) and second (dark blue and red dots) storeys
For the nonlinear cases, the values of PY,NL at nodes on the flexible side were larger than 1, regardless of the storey, while their counterparts at nodes on the stiff side were lower than 1. Generally, the differences in terms of peaks from the CM to the peripheral nodes amounted to up to 50%, with higher dispersion when torsion increases (i.e., higher values of αCR). Also, a gradual increment of peak amplitude at both storeys is present at nodes on the flexible side, while on the stiff side, except for B75, a different trend can be observed between storeys. When it comes to SY,NL, values at nodes on the flexible side were larger than 1, regardless of the storey, while their counterparts on the stiff side were lower than 1. In this case, except for a few dots representing nodes at the first storey and on the stiff side (i.e., red dots) the maximum differences in terms of the resonance period shift from the CM to the peripheral nodes amounted up to 20%, with an overall low dispersion, which tends to increase for the most irregular buildings (i.e., B45). Still, at nodes on the flexible side, for both storeys, FRS indicate the resonance period similar to the one at the CM by increasing αCR, while at nodes on the stiff sides a gradual decrease of the resonance period can be observed, even though the values are generally low.
As done above, regression models were proposed for the obtained values of PY,NL and SY,NL, by relating them with the normalized floor eccentricity, αCR, the height of the nodes, γj, the ductility, μ, and the normalized yielding force, Vy/W. Concerning PY,NL, a linear variation of the peak amplitude with γj, μ, Vy/W, and a quadratic variation of the peak amplitude with αCR was assumed, differentiated for the nodes on flexible and stiff sides, according to the following expression:
For SY, according to the framework proposed so far, analogous regression model to the one in Eq. (14) was established:
In Eqs. (14) and (15), i1, i2, i3, i4, i5, i6, l1, l2, l3, l4, l5, and l6 are the coefficients defining the proposed regression models. Table 5 presents the obtained results for all coefficients, and the values of R2. As can be seen, acceptable values of R2 were obtained for PY,NL, while lower values of R2 were obtained for SY,NL (around 0.3). This can be due to a number of reasons, such as the presence of outliers (e.g., some red dots), and very low values of the resonance period shift. However, in principle, the abovementioned percentage variations can be used to estimate the FRS variations in the presence of torsion. In the end, Fig. 20 reports the capacity of the developed models to predict the observed results for PY,NL (red line indicates the optimal prediction, while scattered points indicate the capacity of models in terms of prediction). The graphical representation of the results for SY,NL is not provided.

Observations vs predictions for the proposed regression models of PY,NL
5 Validation of the proposed regression models
To validate the proposed regression models, a real case study was considered, that is the SPEAR building (Negro et al. 2004; Rozman and Fajfar 2009). The building, built within the SPEAR project, is the representative of most common existing RC buildings in Southern Europe, and it was designed according to old code provisions, without seismic considerations. However, the model used herein, is the one developed by Rozman and Fajfar (2009) and was denoted as “EC8 H” in their work. For the sake of synthesis, structural details are not reported herein, and only the useful data for employing the proposed approach is provided. First, the building is irregular in plan, where the CR is eccentric to the CM in both main directions, for 1.3 m in the X and 1.0 m in the Y directions, respectively (CR is shifted to the left with respect to the CM position). Second, the building has 3 storeys, with a HTOT of 3 m. LX and LY, assumed as the dimension of the rectangle enclosing the building, amount to 9.0 m and 10.5 m, respectively.
The knowledge of the structural details on beams and columns allowed to predispose a detailed nonlinear numerical model, analysed in SAP2000 (CSI 2024), and shown in Fig. 21, left. The model was established by modelling beams and columns like frame elements, and by fixing the base of columns. A rigid diaphragm assumption was applied to each floor. Gravity loads were attributed to the model in terms of appropriate masses, and nonlinearities were simulated by using a lumped plasticity approach, accounting for ductile mechanisms. No brittle mechanisms were considered, such as shear and joint failures, with the aim to avoid the addition of other variables to the problem under investigation.

Numerical model of the SPEAR building (left), and pushover curves in the Y direction (right)
To assess the proposed approach for the estimations of PFA and FRS variations, the change of reference system was involved, and according to Eqs. (4) and (5), the values of αCR and γj were computed for each storey. Still, in order to compute the variation from the CM to the nodes on flexible and stiff sides, two corner nodes were taken into account for each storey, according to the blue and red circles indicated in Fig. 21, left, and marked only for the third storey. For evaluating the additional parameters used in the proposed regression models, i.e., Vy/W and µ, the numerical model was investigated by using a pushover analysis in the Y direction with a uniform load profile. Hence, the values of Vy/W and µ were determined by computing the pushover curve for the ESDoF and the related bilinear idealization. All curves, including the one for the original building (multi-degree-of-freedom, MDoF) are shown in Fig. 21, right.
First, eigenvalue analysis was performed, showing that the main three periods of vibration matched with the ones estimated in Negro et al. (2004). Of interest was also to assess the type of torsional mechanism of the SPEAR building, where the first mode was oriented in the X direction, while the second and third modes were coupled with higher values of M[%] in the Y direction and around the Z direction (rotational), respectively. The results showed that the building can be classified as torsionally stiff.
Nonlinear TH analyses were performed, by applying the same set of 40 ground motion records used for the parametric analysis (see Sect. 2.1). Analyses were run in the Y direction, in order to estimate, for each storey, the variations of PFA and FRS at the nodes on both flexible and stiff sides with respect to the CM. Starting from the PFA, the results in terms of absolute accelerations were collected in the Y and X directions, PFAs were extracted for CM and nodes on flexible and stiff sides, and the values of RY,NL and RX,NL were computed. The obtained results were compared with the ones determined by using the regression models in Eqs. (8) and (9), and by using the coefficients in Table 3. A comparison is shown in Figs. 22, 23, 24, 25, where each figure reports three subplots (one for each storey), showing a histogram containing the RY,NL and RX,NL for each record and a black horizontal line indicating the estimated values obtained by using the proposed regression models.

Observed RY,NL for nodes on the flexible side for each storey (from top to bottom), and black lines indicating the predicted values

Observed RY,NL for nodes on the stiff side for each storey (from top to bottom), and black lines indicating the predicted values

Observed RX,NL for nodes with βj = − 1 for each storey (from top to bottom), and black lines indicating the predicted values

Observed RX,NL for nodes with βj = 1 for each storey (from top to bottom), and black lines indicating the predicted values
When it comes to RY,NL, it can be seen from Figs. 22, 23, 24, 25 that the proposed models provided a good prediction, with the black horizontal lines being in a fairly agreement with each considered case. In all cases, the predicted values were higher than the means of the observed values, which makes the proposal slightly conservative for nodes on flexible side and conservative for nodes on stiff side. Considering the results obtained for RX,NL, fairly good results were again obtained, with some cases where the predicted values were slightly lower than the observed ones (e.g., cases with βj = 1). The overall results are reported in Table 6.
Furthermore, FRS were evaluated in the Y direction for the considered nodes (CM, flexible and stiff sides), accounting for all ground motion records and all storeys. The results are shown in Fig. 26, where FRS and the related means are reported for each storey. As can be observed, the mean FRS have some differences, especially when it comes to the fundamental vibration mode, both in terms of peak amplitudes and resonance periods. In particular, higher peaks were obtained for nodes on the flexible side, while lower peaks were obtained for nodes on the stiff side. A very low resonance period shifts can be seen, which is the result similar to the ones obtained in the parametric study. Also in this case, the proposed regression models were used, and the values of PY,NL and SY,NL were computed for all cases, as shown in Table 7.

FRS and their corresponding means in the Y direction for the CM and nodes on the flexible and stiff sides
The comparison showed that the predicted values of PY,NL were slightly conservative, confirming a good prediction capacity of the proposed models, for FRS both on the flexible and stiff nodes. On the other hand, as expected, the predicted values of SY,NL were not sufficiently accurate (despite the very low percentage differences). However, it is clear that for the case at hand the resonance period shift can easily be overlooked, and only the variation in terms of peak amplitude should be taken into account.
6 Conclusions
The paper presents a study on the influence of the in-plan torsion on peak floor accelerations (PFAs) and floor response spectra (FRS), which is of interest in the seismic analysis, assessment, and design of acceleration-sensitive non-structural components. First, a sample of eight archetype low-rise reinforced concrete (RC) buildings was selected, designed to have increasing floor eccentricity (distance from the centre of the mass, CM, and centre of the rigidity, CR) in one main direction. The sample was investigated in both linear elastic and nonlinear fields. In the case of the latter, the sample was extended up to one thousand units, by systematically varying the constitutive law of plastic hinges. A set of 40 ground motion records was selected and applied as seismic input, in order to derive PFAs and FRS. The outputs of the analyses were elaborated and used to establish empirical regression models able to estimate the observed differences of PFAs and FRS among the CM and nodes on the flexible and stiff sides. The formulations of the models were tested on a real case study example, i.e., the well-known SPEAR building, and their good prediction capacity was demonstrated. The most important outcomes of the study are:
-
1.
By increasing the floor eccentricity, in the direction of analysis, PFAs at the nodes on the flexible side increased with respect to the ones at the CM (up to 50% in the linear elastic field, and up to 20% in nonlinear field), while on the stiff side changes were negligible. Thus, the presence of torsion led to an additional acceleration component in the perpendicular direction of the analysis, which increased with the floor eccentricity, and was expressed as a quote of the PFA in the main direction. The observed values amounted to more than 100% of the PFA in the main direction in the linear elastic cases and ranging from 40 to 60% in nonlinear field. The observed outcomes were related to the floor eccentricity, the height of the considered node, and when moving to nonlinear field, the ductility, and the yielding force.
-
2.
The presence of torsion provided different effects on FRS: (a) a variation of the peak amplitude moving from the CM to the peripheral nodes; (b) a slight resonance period variation. Regarding the first aspect, FRS at nodes on the flexible side had higher peaks than the ones at the CM, while nodes on the stiff side had peaks were similar to the ones obtained at the CM. Different outputs were obtained by moving from the linear elastic to the nonlinear field, where FRS had higher peaks than at the CM for nodes on the flexible side and lower peaks than at the CM for nodes on the stiff side. The differences in the nonlinear field, both for nodes on the flexible and stiff sides, amounted to up to about 20%. Regarding to the resonance period shift, a consistent variation was observed at the nodes of the stiff side in the linear elastic field, while very few variations were seen in nonlinear field, with a maximum difference of up to about 10% from the FRS evaluated at the CM (except for few cases).
Besides the obtained results, it is worth pointing out some limitations of the proposed regression models. First, although the set of 40 ground motion records was used, other sets of records should be applied to check the formulations, given the high sensibility of the results to the applied input. Furthermore, for the time being, the proposed approach should be used only for low-rise buildings. Finally, the main limitation is the fact that the results were obtained by applying the seismic action in one direction. Although such an approach corresponds to rather theoretical cases, it is worth remembering that the main aim of the work was to provide a practical insight into the problem under investigation. In fact, knowing the floor eccentricity, and assuming the node position, one can run a pushover in the perpendicular direction to the eccentricity, extract ductility and yielding force, and compute the proposed ratios (i.e., RY,NL, RX,NL, PY,NL, SY,NL), to estimate the possible PFAs and FRS variation with respect to the CM. This can be a practical way for a fair estimation of PFAs and FRS when torsion occurs.
An extension of the models considered herein should be considered in further studies, by varying some structural parameters neglected in this work. Namely, the investigated archetype buildings were characterized with the fundamental mode period of about 0.3 s, with an intention to represent low-rise RC building configurations. Although the proposed formulations are independent on the natural period, their effectiveness was demonstrated on the case study example with longer fundamental period, i.e., the SPEAR building. Thus, further studies are needed to examine the period influence. In addition, an attention should be also given to the relationship between FRS, centre of strength, and centre of stiffness.
Data availability
The data presented in this study are available on request from the corresponding author.
References
Aldeka AB, Chan AH, Dirar S (2014) Response of non-structural components mounted on irregular RC buildings: comparison between FE and EC8 predictions. Earthq Struct 6(4):351–373. https://doi.org/10.12989/eas.2014.6.4.351
Aldeka AB, Dirar S, Chan AH, Martinez-Vazquez P (2015) Seismic response of non-structural components attached to reinforced concrete structures with different eccentricity ratios. Earthq Struct 8(5):1069–1089. https://doi.org/10.12989/eas.2015.8.5.1069
Aldeka AB, Tziavos NI, Gkantou M, Dirar S, Chan AH (2022) Seismic design of non-structural components mounted on irregular reinforced concrete buildings. J Build Eng 46:103783. https://doi.org/10.1016/j.jobe.2021.103783
Ambraseys N., Smit P., Sigbjörnsson R., Suhadolc P., Margaris B. (2002). Internet-Site for European Strong-Motion Data; European Commission, Research-Directorate General, Environment and Climate Programme, http://isesd.hi.is/
Anagnostopoulos SA, Kyrkos MT, Stathopoulos KG (2015) Earthquake induced torsion in buildings: critical review and state of the art. Earthq Struct 8:305–377. https://doi.org/10.12989/eas.2015.8.2.305
Anajafi H, Medina RA (2019) Lessons learned from evaluating the responses of instrumented buildings in the united states: the effects of supporting building characteristics on floor response spectra. Earthq Spectra 35(1):159–191. https://doi.org/10.1193/081017EQS159M
American Society of Civil Engineers (ASCE). Minimum design loads for buildings and other structures, ASCE Standard, ASCE 7‐10, 2010, Reston, Virginia, United States.
Assi R, Guiro A, Hasanpour GB (2019) Effect of torsion and non-structural components on seismic floors accelerations: a case study building in Montreal. GEN 2019(199):1
Baker JW (2011) Conditional mean spectrum: tool for ground-motion selection. J Struct Eng 137(3):322–331. https://doi.org/10.1061/(ASCE)ST.1943-541X.0000215
Basu D, Giri S (2015) Accidental eccentricity in multistory buildings due to torsional ground motion. Bull Earthq Eng 13:3779–3808. https://doi.org/10.1007/s10518-015-9788-0
Bhasker R, Menon A (2022) A seismic fragility model accounting for torsional irregularity in low-rise non-ductile RC moment-resisting frames. Earthq Eng Struct Dyn 51(4):912–934. https://doi.org/10.1002/eqe.3597
Bommer JJ, Pinho R (2006) Adapting earthquake actions in Eurocode 8 for performance-based seismic design. Earthq Eng Struct Dyn 35(1):39–55. https://doi.org/10.1002/eqe.530
Bosco M, Ghersi A, Marino EM (2012) Corrective eccentricities for assessment by the nonlinear static method of 3D structures subjected to bidirectional ground motions. Earthq Eng Struct Dyn 41(13):1751–1773. https://doi.org/10.1002/eqe.2155
Çelebi M, Şafak E, Youssef N (1991) Torsional response of unique building. J Struct Eng 117(5):1549–1566. https://doi.org/10.1061/(ASCE)0733-9445(1991)117:5(1549)
CSI. SAP2000 (2024) Advanced structural analysis program–manual. Computer and Structures Inc., Berkeley
Degli AS, Cattari S, Lagomarsino S (2018) Theoretically-based and practice-oriented formulations for the floor spectra evaluation. Earthq Struct 15(5):565–581. https://doi.org/10.12989/eas.2018.15.5.565
Degli AS, Cattari S, Lagomarsino S (2022) Validation of a practice-oriented floor spectra formulation through actual data from the 2016/2017 Central Italy earthquake. Bull Earthq Eng 20(13):7477–7511. https://doi.org/10.1007/s10518-022-01498-6
DM 17/01/2018 (2018) Aggiornamento delle Norme Tecniche per le Costruzioni. In: Gazzetta Ufficiale Serie Generale: Rome, Italy (In Italian)
EC8 (2004) EN 1998–1 Eurocode 8: Design of structures for earthquake resistance - Part 1: General rules, seismic actions and rules for buildings, European Committee for Standardization Brussels, Belgium.
EC8 (2005) EN 1998–3 Eurocode 8: Design of structures for earthquake resistance - Part 3: Assessment and retrofitting of buildings, European Committee for Standardization Brussels, Belgium.
Federal Emergency Management Agency (FEMA). NEHRP recommended seismic provisions for new buildings and other structures, FEMA P750, 2009, Washington, D.C.
Ibarra LF, Medina RA, Krawinkler H (2005) Hysteretic models that incorporate strength and stiffness deterioration. Earthquake Eng Struct Dynam 34(12):1489–1511. https://doi.org/10.1002/eqe.495
Iervolino I, Galasso C, Cosenza E (2010) REXEL: computer aided record selection for code-based seismic structural analysis. Bull Earthq Eng 8:339–362. https://doi.org/10.1007/s10518-009-9146-1
IS 1893-Part 4 (2015) Criteria for earthquake resistant design of structures. Industrial structures including stack like structures. Bureau of Indian Standards, New Delhi, India.
Jain A, Surana M (2022) Floor displacement-based torsional amplification factors for seismic design of acceleration-sensitive non-structural components in torsionally irregular RC buildings. Eng Struct 254:113871. https://doi.org/10.1016/j.engstruct.2022.113871
Kaatsız K, Sucuoğlu H (2023) Identification of torsionally stiff and flexible asymmetric systems, and their comparative seismic response evaluation for low-rise frames. J Earthq Eng. https://doi.org/10.1080/13632469.2023.2226250
Landge MV, Ingle RK (2021) Comparative study of floor response spectra for regular and irregular buildings subjected to earthquake. Asian J Civil Eng 22:49–58. https://doi.org/10.1007/s42107-020-00297-1
Landge MV, Ingle RK (2022) Influence of torsional irregularity on tri-directional floor response spectra used in industrial buildings. Innovat Infrastruct Solut 7:1–13. https://doi.org/10.1007/s41062-021-00639-1
Li SQ (2024) Improved seismic intensity measures and regional structural risk estimation models. Soil Dyn Earthq Eng 176:108256. https://doi.org/10.1016/j.soildyn.2023.108256
Li SQ, Formisano A (2023) Updated empirical vulnerability model considering the seismic damage of typical structures. Bull Earthq Eng. https://doi.org/10.1007/s10518-023-01814-8
Li SQ, Gardoni P (2023) Seismic loss assessment for regional building portfolios considering empirical seismic vulnerability functions. Bull Earthq Eng. https://doi.org/10.1007/s10518-023-01793-w
McKenna F (2011) OpenSees: a framework for earthquake engineering simulation. Comput Sci Eng 13(4):58–66. https://doi.org/10.1109/MCSE.2011.66
Miranda E, Taghavi S (2005) Approximate floor acceleration demands in multi-story buildings. I: Formulation. J Struct Eng 131(2):203–211. https://doi.org/10.1061/(ASCE)0733-9445(2005)131:2(203)
Mohammed HH, Ghobarah A, Aziz TS (2008) Seismic response of secondary systems supported by torsionally yielding structures. J Earthq Eng 12(6):932–952. https://doi.org/10.1080/13632460701758588
Negro P, Mola E, Molina FJ, Magonette GE (2004) Full-scale PSD testing of a torsionally unbalanced three-storey non-seismic RC frame. In the 13th World conference on Earthquake Engineering, Vancouver, Canada, No. 968.
NIST (2017) Seismic Analysis, Design, and Installation of Nonstructural Components and Systems – Background and Recommendations for Future Work, NIST GCR 17–917–44, Applied Technology Council, National Institute of Standards and Technology, Gaithersburg, MD, USA.
NIST (2018) Recommendations for Improved Seismic Performance of Nonstructural Components, NIST GCR 18–917- 43, Applied Technology Council, National Institute of Standards and Technology, Gaithersburg, MD, USA.
O’Reilly GJ, Calvi GM (2020) Quantifying seismic risk in structures via simplified demand–intensity models. Bull Earthq Eng 18(5):2003–2022. https://doi.org/10.1007/s10518-019-00776-0
O’Reilly GJ, Calvi GM (2021) A seismic risk classification framework for non-structural elements. Bull Earthq Eng 19(13):5471–5494. https://doi.org/10.1007/s10518-021-01177-y
O’Reilly GJ, Sullivan TJ, Filiatrault A (2017) Implications of a more refined damage estimation approach in the assessment of RC frames. In 16th World Conference on Earthquake Engineering, Santiago Chile, Paper No. 3705.
Perrone D, Calvi PM, Nascimbene R, Fischer EC, Magliulo G (2019) Seismic performance of non-structural elements during the 2016 Central Italy earthquake. Bull Earthq Eng 17(10):5655–5677. https://doi.org/10.1007/s10518-018-0361-5
Peruš I, Fajfar P (2005) On the inelastic torsional response of single-storey structures under bi-axial excitation. Earthq Eng Struct Dyn 34:931–941. https://doi.org/10.1002/eqe.462
Petrone C, Magliulo G, Manfredi G (2016) Floor response spectra in RC frame structures designed according to Eurocode 8. Bull Earthq Eng 14:747–767. https://doi.org/10.1007/s10518-015-9846-7
Pettinga JD, Priestley MN, Pampanin S, Christopoulos C (2007) The role of inelastic torsion in the determination of residual deformations. J Earthq Eng 11(S1):133–157. https://doi.org/10.1080/13632460701280088
Poursha M, Khoshnoudian F, Moghadam AS (2014) The extended consecutive modal pushover procedure for estimating the seismic demands of two-way unsymmetric-plan tall buildings under influence of two horizontal components of ground motions. Soil Dyn Earthq Eng 63:162–173. https://doi.org/10.1016/j.soildyn.2014.02.001
Rozman M, Fajfar P (2009) Seismic response of a RC frame building designed according to old and modern practices. Bull Earthq Eng 7(3):779–799. https://doi.org/10.1007/s10518-009-9119-4
Ruggieri S, Uva G (2020) Accounting for the spatial variability of seismic motion in the pushover analysis of regular and irregular RC buildings in the new Italian building code. Buildings 10(10):177. https://doi.org/10.3390/buildings10100177
Ruggieri S, Vukobratović V (2023) Acceleration demands in single-storey RC buildings with flexible diaphragms. Eng Struct 275:115276. https://doi.org/10.1016/j.engstruct.2022.115276
Surana M, Singh Y, Lang DH (2018) Effect of irregular structural configuration on floor acceleration demand in hill-side buildings. Earthq Eng Struct Dyn 47(10):2032–2054. https://doi.org/10.1002/eqe.3054
Taghavi S, Miranda E (2005) Approximate floor acceleration demands in multistory buildings. II: applications. J Struct Eng 131(2):212–220. https://doi.org/10.1061/(ASCE)0733-9445(2005)131:2(212)
Tena-Colunga A (2021) Conditions of structural irregularity. Relationships with observed earthquake damage in Mexico City in 2017. Soil Dyn Earthq Eng 143:106630. https://doi.org/10.1016/j.soildyn.2021.106630
Acknowledgements
The research of the second author has been supported by the Ministry of Science, Technological Development and Innovation through project no. 451-03-47/2023-01/200156 "Innovative scientific and artistic research from the FTS domain".
Funding
Open access funding provided by Politecnico di Bari within the CRUI-CARE Agreement. The first author acknowledges funding by Italian Ministry of University and Research, within the project ‘PON-Ricerca e Innovazione-2014–2020, CODICE CUP (D.M. 10/08/2021, n. 1062): D95F21002140006; (D.M. 25/06/2021, n. 737): D95F21002160001.
Author information
Authors and Affiliations
Contributions
All authors were personally and actively involved in substantial work leading to the paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethical approval
The submitted work is original and not published elsewhere in any form or language.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ruggieri, S., Vukobratović, V. The influence of torsion on acceleration demands in low-rise RC buildings. Bull Earthquake Eng 22, 2433–2468 (2024). https://doi.org/10.1007/s10518-024-01873-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-024-01873-5