
Abstract
We define decision-making functions which arise from studying the multidimensional generalization of the weighted Bajraktarević means. It allows a nonlinear approach to optimization problems. These functions admit several interesting (from the point of view of decision-making) properties, for example, delegativity (which states that each subgroup of decision-makers can aggregate their decisions and efforts), casuativity (each decision affects the final outcome except two trivial cases) and convexity-type properties. Beyond establishing the most important properties of such means, we solve their equality problem, we introduce a notion of synergy and characterize the null-synergy decision-making functions of this type.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The mathematical models for decision-making create challenging and important problems binding computer science, economy, mathematics and psychology. In one of such models there is a set D of all possible decisions and a finite number n of players (decision makers) with their individual nonnegative weights (efforts) and decisions. Obviously, the sum of all weights cannot be zero and thus (as a vector) it belongs to the set
The issue is to aggregate all the individual decisions with the corresponding weights to one (common) decision. For this purpose, we need the notion of an aggregation function on D, which is defined to be a mapping
For instance, when the set D of decisions is a convex subset of a linear space X, then the weighted arithmetic mean \(\mathscr {A}\), which is defined as
is a well-known aggregation function. Further examples for aggregation functions are as follows (see for example Henson (1998)):
-
(1)
The Primacy Effect \(\mathscr {D}_{PE} :\mathscr {W}(D)\rightarrow D\) is defined by
$$\begin{aligned} {\mathscr {D}_{PE}(x,\lambda ):=x_i, \quad \text {if } \lambda _i \ne 0 \text { and }\lambda _j =0\text { for all } j\in \{1,\dots ,i-1\}.} \end{aligned}$$ -
(2)
The Recency Effect \(\mathscr {D}_{RE} :\mathscr {W}(D)\rightarrow D\) is defined by
$$\begin{aligned} {\mathscr {D}_{RE}(x,\lambda ):=x_i, \quad \text {if } \lambda _i \ne 0 \text { and }\lambda _j =0\text { for all }j\in \{i+1,\dots ,n\}.} \end{aligned}$$ -
(3)
The First Dominating Decision \(\mathscr {D}_{FDD} :\mathscr {W}(D)\rightarrow D\) is given by
$$\begin{aligned} {\mathscr {D}_{FDD}(x,\lambda ):=x_i, \quad \text {if } \lambda _i =\max (\lambda ) \text { and }\lambda _j <\lambda _i \text { for all }j\in \{1,\dots ,i-1\}.} \end{aligned}$$ -
(4)
The First Dominant \(\mathscr {D}_{FD} :\mathscr {W}(D)\rightarrow D\) is given by
$$\begin{aligned}{ \mathscr {D}_{FD}(x,\lambda ):=\mathscr {D}_{FDD}(x,\lambda ^*), \qquad \text{ where } \lambda _i^*:=\sum _{j:x_j=x_i} \lambda _j. }\end{aligned}$$
All functions listed in (1)–(4) are reflexive, eliminative, nullhomogeneous in the weights but not symmetric (see the relevant definitions below). Furthermore, they are all conservative (or selective), which means that the aggregated decision is always one of the individual ones. For a detailed study of (nonweighted) conservative aggregation functions, we refer the reader to the recent study by Couceiro et al. (2018) and Devillet et al. (2019). The theory of means, which seems to be an instrumental field for decision making has been surveyed and applied in several recent and former books, see Gini (1958), Bullen (2003), Bullen et al. (1988), Beliakov et al. (2007, 2016) and Grabisch et al. (2009).
In many settings, D is an infinite set which often refers to the position of the players in a space before the game. An aggregation function unites the positions of all the players into one. An individual nonnegative weight measures the impact of the decision of the corresponding players to the final outcome. In order to introduce plausible and natural properties for aggregation functions, we introduce the concept of decision-making functions on an arbitrary set D. For this aim, we adopt the notion of weighted means (which were defined on an interval) from the paper Páles and Pasteczka (2018) to our more general setting. An aggregation function \(\mathscr {M}:\mathscr {W}(D)\rightarrow D\) is called a decision-making function (on D) if it satisfies the following five conditions:
-
(i)
\(\mathscr {M}\) is reflexive: For all \(x \in D\) and \(\lambda \in \mathbb {R}_+\), we have \(\mathscr {M}(x,\lambda )=x\).
-
(ii)
\(\mathscr {M}\) is nullhomogeneous in the weights: For all \(n \in \mathbb {N}\), \((x_1,\dots ,x_n)\in D^n\), \((\lambda _1,\dots ,\lambda _n)\in W_n\), and \(t \in \mathbb {R}_+\), we have
$$\begin{aligned} {\qquad \mathscr {M}\big ((x_1,\dots ,x_n),(t\lambda _1,\dots ,t\lambda _n)\big ) =\mathscr {M}\big ((x_1,\dots ,x_n),(\lambda _1,\dots ,\lambda _n)\big ).} \end{aligned}$$ -
(iii)
\(\mathscr {M}\) is symmetric: For all \(n \in \mathbb {N}\), \((x_1,\dots ,x_n)\in D^n\), \((\lambda _1,\dots ,\lambda _n)\in W_n\) and for all permutations \(\sigma \) of \(\{1,\dots ,n\}\), we have
$$\begin{aligned} {\qquad \mathscr {M}\big ((x_{\sigma (1)},\dots ,x_{\sigma (n)}), (\lambda _{\sigma (1)},\dots ,\lambda _{\sigma (n)})\big ) =\mathscr {M}\big ((x_1,\dots ,x_n),(\lambda _1,\dots ,\lambda _n)\big ).} \end{aligned}$$ -
(iv)
\(\mathscr {M}\) is eliminative or neglective: For all \(n\ge 2\), \((x_1,\dots ,x_n)\in D^n\) and \((\lambda _1,\dots ,\lambda _n)\in W_n\) with \(\lambda _1=0\), we have
$$\begin{aligned} {\qquad \mathscr {M}\big ((x_1,\dots ,x_n),(\lambda _1,\dots ,\lambda _n)\big ) =\mathscr {M}\big ((x_2,\dots ,x_n),(\lambda _2,\dots ,\lambda _n)\big ).} \end{aligned}$$ -
(v)
\(\mathscr {M}\) is reductive: For all \(n\ge 2\), \((x_1,\dots ,x_n)\in D^n\) with \(x_1=x_2\) and \((\lambda _1,\dots ,\lambda _n)\in W_n\), we have
$$\begin{aligned} {\qquad \mathscr {M}\big ((x_1,\dots ,x_n),(\lambda _1,\dots ,\lambda _n)\big ) =\mathscr {M}\big ((x_2,x_3,\dots ,x_n),(\lambda _1+\lambda _2,\lambda _3,\dots ,\lambda _n)\big ).} \end{aligned}$$
We also introduce the concept of the effort function, which is aiming to aggregate the individual weights (efforts) into one positive number:
A function \(\mathscr {E}:\mathscr {W}(D)\rightarrow \mathbb {R}_+\) is called an effort function (on D) if it satisfies the following five conditions:
-
(i)
\(\mathscr {E}\) is reflexive in the weights: For all \(x \in D\) and \(\lambda \in \mathbb {R}_+\), we have \(\mathscr {E}(x,\lambda )=\lambda \).
-
(ii)
\(\mathscr {E}\) is homogeneous in the weights: For all \(n \in \mathbb {N}\), \((x_1,\dots ,x_n)\in D^n\), \((\lambda _1,\dots ,\lambda _n)\in W_n\), and \(t \in \mathbb {R}_+\), we have
$$\begin{aligned}{\qquad \mathscr {E}\big ((x_1,\dots ,x_n),(t\lambda _1,\dots ,t\lambda _n)\big ) =t\mathscr {E}\big ((x_1,\dots ,x_n),(\lambda _1,\dots ,\lambda _n)\big ).} \end{aligned}$$ -
(iii)
\(\mathscr {E}\) is symmetric.
-
(iv)
\(\mathscr {E}\) is eliminative or neglective.
-
(v)
\(\mathscr {E}\) is reductive.
One can easily see that the map \(\alpha :\mathscr {W}(D)\rightarrow \mathbb {R}_+\) given by
is an effort function, which we call the arithmetic effort function.
The symmetry property of decision-making and effort functions means that there is no distinction between players and also their order is irrelevant for the decision. This property has a far-reaching consequences especially for conservative functions, as it determines the anty-symmetric preference relation on D by \(x\succ y:\!\!\iff x=\mathscr {M}((x,y),(1,1))\) (cf. Devillet (2019) for details). It was proved experimentally that this relation cannot be generalized to multivariable choice; this phenomena is known as a decoy effect (see for example Huber et al. (1982)).
The nullhomogeneity of \(\mathscr {M}\) and the homogeneity of \(\mathscr {E}\) in the weights states that if the weights are scaled by the same factor, then the decision remains unchanged and the effort is scaled by the same factor. The meaning of the elimination principle is that players with zero weight do not affect the decision and the effort. One can easily check that the arithmetic mean is a decision-making function over any convex subset of a linear space.
We introduce now an aggregation-type property which will play a significant role in the sequel. We say that a decision-making function \(\mathscr {M}\) on D is delegative (admits the delegation principle or partial aggregation principle) if, for all \((y,\mu )\in \mathscr {W}(D)\), there exists a pair \((y_0,\mu _0) \in D \times \mathbb {R}_+\) such that
Analogously, we can speak about the delgativity of an effort function \(\mathscr {E}\) on D which means that, for all \((y,\mu )\in \mathscr {W}(D)\), there exists a pair \((y_0,\mu _0) \in D \times \mathbb {R}_+\) such that
Lemma 1
Let \((y,\mu )\in \mathscr {W}(D)\) be fixed. If \(\mathscr {M}:\mathscr {W}(D)\rightarrow D\) is a delegative decision-making function, then (1.1) holds if and only if \(y_0=\mathscr {M}(y,\mu )\). Analogously, if \(\mathscr {E}:\mathscr {W}(D)\rightarrow \mathbb {R}_+\) is a delegative effort function, then (1.2) holds if and only if \(\mu _0=\mathscr {E}(y,\mu )\).
Proof
Using the properties of decision making functions and applying the delegativity of \(\mathscr {M}\) for \((x,\lambda )=(y,\mu )\) twice, we get
Similarly, the properties of effort functions and applying the delegativity of \(\mathscr {E}\) yield
which completes the proof of the lemma. \(\square \)
Motivated by the above statement, a delegative decision-making function \(\mathscr {M}\) and a delegative effort function \(\mathscr {E}\) are called associated if, for all \((y,\mu )\in \mathscr {W}(D)\), the equalities (1.1) and (1.2) hold with \((y_0,\mu _0)=(\mathscr {M}(y,\mu ),\mathscr {E}(y,\mu ))\).
The aim of this paper is to present a construction of a broad class of decision-making and effort functions which arise from studying the so-called weighted Bajraktarević means (whose definition will be recalled at the beginning of Section 3). Despite of the analytical background of this paper, we are convinced that our construction could provide useful models for game theoretical and for decision-making problems.
Our motivation is to present a mean-type approach to studying the Farm Structure Optimization Problem—cf. for example Abd El-Wahed and Abo-Sinna (2001), Czyżak (1990), Słowiński and Teghem (1990), Tzeng and Huang (2014) and Jiuping and Zhou (2011).
2 Observability and conical convexity
A subset S of a linear space X over \(\mathbb {R}\) is called a ray if \(S=R_x:=\mathbb {R}_+x:=\{\lambda x\mid \lambda \in \mathbb {R}_+\}\) holds for some nonzero element \(x\in X\). If \(y\in R_x\), then the unique positive numbers \(\lambda \) for which \(y=\lambda x\) holds will be denoted by [y : x].
A set S is called a cone if it is the union of rays of X. One can see that S is a cone precisely if it is closed under multiplication by positive scalars. The cone generated by the set S – denoted by \({{\,\textrm{cone}\,}}(S)\) – is the smallest cone containing S. It is clear that \({{\,\textrm{cone}\,}}(S)=\mathbb {R}_+S=\bigcup _{x\in S}R_x\).
A subset S of X over \(\mathbb {R}\) is called observable (from the origin) if the rays generated by two distinct elements of S are disjoint. Note that for an observable subset S, every ray contained in \({{\,\textrm{cone}\,}}(S)\) intersects S at exactly one point. Moreover, the family \(\{R_x \mid x \in S\}\) is a partition of \({{\,\textrm{cone}\,}}(S)\). Due to this fact, for every observable set S, one can define the projection along rays (briefly, the ray projection) \(\pi _S :{{\,\textrm{cone}\,}}(S) \rightarrow S\) as follows: For every \(x\in S\) and \(y\in R_x\), we have \(\pi _S(y)=x\). As a matter of fact, observability of S is not only sufficient but also necessary to define such map.
We say that a function \(f:D\rightarrow X\) is observable if it is injective and has an observable image. Analogously to the previous setup, we define \(\pi _f:=\pi _{f(D)}\). The extended inverse of f, denoted by \(f^{(-1)}:{{\,\textrm{cone}\,}}(f(D))\rightarrow D\) is defined by
Clearly, \(f^{(-1)}(x)=f^{-1}(x)\) if \(x\in f(D)\).
We say that a subset S of X is conically convex if \({{\,\textrm{cone}\,}}(S)\) is a convex set and convex hull of S does not contain the origin. Note that conical convexity is a weaker property than convexity: every convex set which does not contain zero is conically convex, the converse implication is not true.
Hereafter an observable function \(f :D \rightarrow X\) such that f(D) is conically convex is called admissible.
In the next result we give a characterization of admissibility for functions defined on an interval with a 2-dimensional range.
Theorem 1
Let I be a real interval and let \(f=(f_1,f_2):I\rightarrow \mathbb {R}^2\) be continuous. Then f is admissible if and only if, for all distinct elements \(x,y\in I\), f(x) and f(y) are linearly independent, that is,
Proof
Assume first that f is admissible but (2.1) is not valid for some \(x,y\in I\) with \(x\ne y\). Then the two vectors f(x) and f(y) are linearly dependent. Thus, there exist \((\alpha ,\beta )\ne (0,0)\) such that \(\alpha f(x)+\beta f(y)=0\). Because (0, 0) is not contained in f(I), we have that \(f(x)\ne (0,0)\ne f(y)\), hence \(\alpha \beta \ne 0\). In the case when \(\alpha \beta <0\), we get that the rays generated by f(x) and f(y) are the same, which contradicts the observability. If \(\alpha \beta >0\), then (0, 0) is in the segment connecting [f(x), f(y)], which contradicts the property that the convex hull of f(I) does not contain the origin.
Assume now that (2.1) holds for all \((x,y)\in \Delta (I):=\{(x,y)\mid x,y\in I,\,x<y\}\). This immediately shows that f(I) is observable.
Since \(\Delta (I)\) is a convex set and f is continuous, therefore the determinant is either positive on \(\Delta (I)\) or negative on \(\Delta (I)\). We may assume that it is positive everywhere on \(\Delta (I)\). Then the pair \((f_1,f_2)\) is a so-called Chebyshev system on I. According to Bessenyei and Páles (2003, Theorem 2), there exist two real constants \(\alpha \) and \(\beta \) such that \(\alpha f_1+\beta f_2\) is positive over the interior of I and thus it is nonnegative over I. This implies that the curve f(I) is contained in the closed half plain \(P=\{(u,v)\in \mathbb {R}^2\mid \alpha u+\beta v\ge 0\}\). Consider now the unit circle and project the curve f(I) into it. Then, by the continuity of the projection mapping, the projection of the curve is an arc of the unit circle which is contained in P. It is obvious that the conical hull of the curve f(I) and the conical hull of the arc are identical. On the other hand, the property that the arc is contained in the half plain P, implies that its conical hull is convex. This shows the conical hull of f(I) is also convex.
The origin cannot be contained in the conical hull of f(I) because then there were two distinct points of f(I) belonging to the boundary line \(\{(u,v)\in \mathbb {R}^2\mid \alpha u+\beta v=0\}\) such that the origin were in the segment connecting them. This contradicts the property that every two distinct points of f(I) are linearly independent. \(\square \)
3 Generalized Bajraktarević means and their properties
In what follows, based on the concept of the generalized inverse of vector-valued functions defined in the previous section, we will introduce a new class of means. In the 2 dimensional case, after Theorem 3, we will point out that this concept includes the classical Bajraktarević means, which will be described later. Therefore, we take the liberty to call them generalized Bajraktarević means.
Given an admissible function \(f:D\rightarrow X\), we can define the (weighted) generalized Bajraktarević mean \(\mathscr {B}_f:\mathscr {W}(D)\rightarrow D\) by
where the coordinates of x are the entries and coordinates of \(\lambda \) are the corresponding weights. We also define \(\beta _f :\mathscr {W}(D)\rightarrow \mathbb {R}_+\) by
which we call the effort function associated to \(\mathscr {B}_f\).
Formally, the definition given in (3.1) is similar (in fact, almost identical) to the definition of weighted quasiarithmetic means. However, the generalized inverse function \(f^{(-1)}\) is different from \(f^{-1}\) in general. These two inverses coincide only in the case when the range of f is convex. Therefore, our definition provides a true extension.
Intuitively, D is the space of all possible decisions, the coordinates of the vector x are the considered decisions, and the corresponding coordinates of \(\lambda \) are the effort of players invested into the option. In this way \(\mathscr {B}_f(x,\lambda )\) is the decision derived from the possible decisions and their weights.

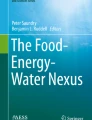
Evaluation of \(m=\mathscr {B}_f((x_1,x_2),(1,1))\)
Example 1
To illustrate the concept of the generalized Bajraktarević mean of two elements of D, assume that \(f=(f_1,f_2):D \rightarrow \mathbb {R}^2\) is an admissible function and f(D) has a range like the green curve in Fig. 1. We can see that the distinct points of f(D) belong to disjoint rays, whence it follows that f is observable. Furthermore \({{\,\textrm{conv}\,}}(f(D))\) does not contain zero and \({{\,\textrm{cone}\,}}(f(D))\) (being an angle domain bounded by the two black halflines) is convex. Whence we obtain that f is admissible.
Take \(x_1,x_2 \in D\) in order to calculate \(\mathscr {B}_f((x_1,x_2),(1,1))\). We first compute the vector \(y:=f(x_1)+f(x_2)\). Then the ray \(\mathbb {R}_+y\) intersects the range f(D) at some point, say at f(m) (where \(m \in D\)). Then \(\pi _f(y)=\pi _f(f(x_1)+f(x_2))=f(m)\) and, consequently,
The corresponding effort \(\beta _f((x_1,x_2),(1,1))\) is the ratio of the vectors \(f(x_1)+f(x_2)\) and f(m) (on the picture, this ratio is approximately 1.7).
Lemma 2
Let \(f:D \rightarrow X\) be an admissible function. Then, for all \(n \in \mathbb {N}\) and \((x,\lambda ) \in D^n \times W_n\), there exists exactly one pair \((u,\eta ) \in D \times \mathbb {R}_+\) satisfying
Furthermore, \(u=\mathscr {B}_f(x,\lambda )\) and \(\eta =\beta _f(x,\lambda )\).
Proof
As f(D) is conically convex, we know that
Thus there exists \(\eta \in \mathbb {R}_+\) such that
Moreover, as f(D) is observable, the constant \(\eta \) is uniquely determined by x and \(\lambda \). Now, as f is injective, there exists exactly one \(u\in D\) such that
which is trivially equivalent to (3.2). The last assertion simply follows from the definition of \(\mathscr {B}_f(x,\lambda )\) and \(\beta _f(x,\lambda )\). \(\square \)
Now \(\mathscr {B}_f\) is the equivalent (or aggregated) decision, \(\beta _f\) is the equivalent (or aggregated) effort. In fact \(\beta _f\), can be considered as the amount of goods we need to invest into a single decision to be irrelevant between the diversed an the aggregated situation. This property is much more transparent in view of Theorem 4.
Theorem 2
Let \(f:D\rightarrow X\) be an admissible function. Then \(\mathscr {B}_f\) is a decision-making function and \(\beta _f\) is an effort function on D.
Proof
Fix \(n \in \mathbb {N}\) and \((x,\lambda ) \in D^n \times W_n\). In view of Lemma 2 both \(\mathscr {B}_f(x,\lambda )\) and \(\beta _f(x,\lambda )\) depend on its arguments implicitly via the sum \(\sum _{k=1}^n \lambda _k f(x_k)\). This immediately implies that \(\mathscr {B}_f\) and \(\beta _f\) are both symmetric, reductive and eliminative. The nullhomogeneity of \(\mathscr {B}_f\) is obvious in view of the definition of \(f^{(-1)}=f^{-1} \circ \pi _f\). The reflexivity properties of \(\mathscr {B}_f\) and \(\beta _f\) are immediate consequences of the equalities
Now we only need to verify the homogeneity of \(\beta _f\) in the weights. To this end, take additionally \(t \in \mathbb {R}_+\). By the definition of \(\beta _f\) and the nullhomogeneity of \(\mathscr {B}_f\), we have
which completes the proof. \(\square \)
Theorem 3
Let \(f=(f_1,f_2):I \rightarrow \mathbb {R}^2\) be a continuous function such that \(f_2\) is nowhere zero and \(f_1/f_2\) is strictly monotone. Then f is admissible and, for \(n\in \mathbb {N}\), \(x =(x_1,\dots ,x_n)\in I^n\), and \(\lambda =(\lambda _1,\dots ,\lambda _n) \in W_n\),
This result shows that the standard Bajraktarević means can be regarded as particular cases of generalized Bajraktarević means. Indeed, if \(\varphi :I\rightarrow \mathbb {R}\) is a continuous strictly monotone function and \(w:I\rightarrow \mathbb {R}_+\) is a continuous function, then with \(f_1:=w\varphi \) and \(f_2:=w\), we can immediately see that \(\mathscr {B}_f(x,\lambda )\) is of the form
which is the so-called Bajraktarević mean, see Bajraktarevic (1958, 1963).
Proof
First we show that \(f=(f_1,f_2)\) is admissible. In view of Theorem 1, it is sufficient to show that (2.1) holds for all distinct elements x, y of I. Indeed,
which is nonzero by our assumptions.
To prove the identity (3.3), let \(n \in \mathbb {N}\) and a pair \((x,\lambda )\in I^n \times W_n\) be fixed. According to Lemma 2, tha pair \((u,\eta ):=(\mathscr {B}_f(x,\lambda ),\beta _f(x,\lambda ))\) is the unique solution of the equation
This (vector) equation is equivalent to the scalar system
Dividing the first equality by the second one, side by side, we get that
Using that \(f_1/f_2\) is invertible and applying its inverse to both sides, we obtain that
which shows that \(\mathscr {B}_f(x,\lambda )=u\) has the form given by (3.3). The equality
implies (3.4) immediately. \(\square \)
Remark 1
The definition of a mean \(\mathbb {B}_{\varphi ,w}:\mathscr {W}(I)\rightarrow I\) by formula (3.5) was suggested by Bajraktarević in his seminal papers Bajraktarević (1958, 1963). Here \(I\subseteq \mathbb {R}\) is an interval, \(\varphi :I\rightarrow \mathbb {R}\) is a continuous strictly monotone function and \(w:I\rightarrow \mathbb {R}_+\) is a positive function. If the weight function w is constant, then this expression simplifies to the classical formula for weighted quasiarithmetic means. This is why these means were often called generalized quasiarithmetic means or quasiarithmetic means with weight function. Nowadays, these means are termed Bajraktarević means. This class of means was thoroughly investigated by Aczél, Daróczy and Losonczi in their papers Aczél and Daróczy (1963), Daróczy and Losonczi (1971), Losonczi (1971a, 1971b) in which they studied the homogeneity property, the equality as well as the comparison and Hölder- and Minkowski-type inequalities for these means, respectively. The characterization (or axiomatization) of Bajraktarević means was established in the paper Páles (1987) by the first author.
Example 2
Another particular case of the above theorem is when \(f_1\) and \(f_2\) are power functions on \(I=\mathbb {R}_+\): \(f_1(x)=x^p\) and \(f_2(x)=x^q\), where \(p,q\in \mathbb {R}\) with \(p\ne q\). Then
which are called the Gini mean and the Gini effort function of parameter (p, q) where \(p\ne q\) (cf. Gini (1938)). For the case \(p=q\), let \(f_1(x):=x^p\ln (x)\) and \(f_2(x):=x^p\). Then we have
Example 3
In this example, we describe a situation when the image space X is three dimensional and the generalized Bajraktarević mean and the related effort function still have explicit forms. Given a manifold \(S:=\{(x,y,z)\mid x^2+y^2-z^2=-1 \wedge z\ge 0\}\subseteq \mathbb {R}^3\) with a parametrization \(f :\mathbb {R}^2 \rightarrow S\) given by \(f(x,y)=(x,y,\sqrt{1+x^2+y^2})\). Then S is observable, f is admissible and the Bajraktarević-type mean \(\mathscr {B}_f :\mathscr {W}(\mathbb {R}^2)\rightarrow \mathbb {R}^2\) is of the following form (here and below \(n \in \mathbb {N}\) is fixed, \(x,y\in \mathbb {R}^n\), and \(\lambda \in W_n\)):
Now define
We can easily verify that
which yields
Furthermore the inverse triangle (Minkowski’s) inequality (for \(\ell ^{1/2}\)) applied to the vectors \((\lambda _i^2)\), \((\lambda _i^2x_i^2)\), \((\lambda _i^2y_i^2)\) implies \(\beta _f((x,y),\lambda ) \ge \lambda _1+\dots +\lambda _n\). Later, in Section 7, we will interpret this property that the synergy of f is nonnegative.
Observe that the above mean is not the standard convex combination of its arguments. Indeed, for the entries \((x,y)=((1,0),(0,1))\) and weights \(\lambda =(1,1)\), we get \(\mathscr {B}_f((x,y),\lambda )=(\frac{\sqrt{6}}{6},\frac{\sqrt{6}}{6})\), which obviously does not belong to the segment \({{\,\textrm{conv}\,}}((0,1),(1,0))\).
4 Aggregation-type properties
4.1 Delegativity
In this subsection we establish the delegativity of the generalized Bajraktarević means and the corresponding effort functions, moreover, we show that these two maps are associated to each other.
Theorem 4
Let \(f :D \rightarrow X\) be an admissible function. Then both \(\mathscr {B}_f\) and \(\beta _f\) are delegative and associated.
Proof
Fix \(m\in \mathbb {N}\) and \((y,\mu )\in D^m\times W_m\). For an arbitrary \((x,\lambda )\in D^n\times W_n\), according to the Lemma 2, we have
Then, these equalites and Lemma 2 imply
which then yields (1.1). \(\square \)
The following result could be derived from the above theorem, but we shall provide a direct and short proof for it.
Corollary 1
Let \(f :D \rightarrow X\) be an admissible function. Let \(n,m\in \mathbb {N}\), \(x\in D^n\) and \(\lambda ^{(1)},\dots ,\lambda ^{(m)}\in W_n\). Denote \(y_j:=\mathscr {B}_f(x,\lambda ^{(j)})\) and \(\mu _j:=\beta _f(x,\lambda ^{(j)})\) for \(j\in \{1,\dots ,m\}\). Then, for all \((t_1,\dots ,t_m)\in W_m\),
Proof
By the definitions of \(y_1,\dots ,y_m\) and \(\mu _1,\dots ,\mu _m\), according to Lemma 2, we have
Multiplying this equality by \(t_j\) side by side, and then summing up the equalities so obtained for \(j\in \{1,\dots ,m\}\), we get
This equality, by the observability of f, yields (4.1). \(\square \)
The latter corollary can be also rewritten in the matrix form.
Corollary 2
Let \(f :D \rightarrow X\) be an admissible function. Let \(x\in D^n\), and \(\Lambda =(\lambda ^{(1)},\dots ,\lambda ^{(m)})\in W_n^m\). Define a vector \(y:=\big (\mathscr {B}_f(x,\lambda ^{(i)})\big )_{i=1}^m \in D^m\) and \(\mu :=\big (\beta _f(x,\lambda ^{(i)})\big )_{i=1}^m \in \mathbb {R}_+^m\). Then, for all \(t\in W_m\),
where “\(\cdot \)” stands for the coordinate-wise multiplication of the elements of \(W_m\).
4.2 Casuativity
We say that a decision making function \(\mathscr {M}\) on D is casuative if for all \((x,\lambda )\in \mathscr {W}(D)\) and for all pair \((y,\mu ) \in D \times (0,+\infty )\), we have
Casuativity is somehow opposite to conservativity. Namely there holds the following easy-to-see lemma.
Lemma 3
Let \(\mathscr {M}\) be a symmetric and casuative decision-making function on D. Then for all distinct \(x_1,x_2 \in D\) and \(\lambda _1,\lambda _2 \in (0,+\infty )\) we have \(\mathscr {M}((x_1,x_2),(\lambda _1,\lambda _2)) \in D {\setminus }\{x_1,x_2\}\).
It is also reasonable to define weak casuativity in the case when the \((\Leftarrow )\) implication of (4.3) holds. Observe that there are number of weakly casuative decision making functions which are not casuative, for example decision making functions which are induced by a preference relation.
Proposition 1
Generalized Bajraktarević mean \(\mathscr {B}_f\) is casuative for every admissible function \(f :D \rightarrow X\).
Proof
As \(\mathscr {B}_f\) is delegative it is sufficient to show that (4.3) holds for all \((x,\lambda )\in D \times \mathbb {R}_+\). The \((\Leftarrow )\) part is then trivial. To prove the converse implication let \(x,y \in D\) and \(\lambda , \mu \in (0,+\infty )\) such that
Thus, by Lemma 2, there exists \(\eta \in \mathbb {R}_+\) such that \(\lambda f(x)+\mu f(y)=\eta f(x)\). Consequently, as \(\mu \ne 0\) we get \(f(y)=\tfrac{\eta -\lambda }{\mu }f(x)\). Now admissibility of f implies \(0 \notin {{\,\textrm{conv}\,}}f(X)\) and therefore \(\tfrac{\eta -\lambda }{\mu }>0\). Then observability of f yields \(y=x\). \(\square \)
This property plays an important role in the definition of effort function.
Corollary 3
Let \(f:D \rightarrow X\) and \(g :D \rightarrow Y\) be two admissible function such that \(\mathscr {B}_f=\mathscr {B}_g\). Then \(\beta _f=\beta _g\).
Proof
Let \((x,\lambda )\in \mathscr {W}(D)\), set \(m:=\mathscr {B}_f(x,\lambda )=\mathscr {B}_g(x,\lambda )\) and assume that \(d:=\beta _g(x,\lambda )-\beta _f(x,\lambda )\ne 0\). Without loss of generality, we may assume that \(d>0\).
Take \(y_0 \in D \setminus \{m\}\) arbitrarily. By Theorem 4 and the equality \(\mathscr {B}_f=\mathscr {B}_g\) we have
Now by casuativity of \(\mathscr {B}_f\) and \(d>0\), we obtain
which implies \(y_0=m\), a contradiction. Therefore, \(d=0\), i.e., \(\beta _g(x,\lambda )=\beta _f(x,\lambda )\). \(\square \)
5 Convexity induced by admissible functions
For an admissible function \(f :D \rightarrow X\), a subset \(S\subseteq D\) is called f-convex if, for all \(n\in \mathbb {N}\), \((x,\lambda )\in S^n\times W_n\), we have that \(\mathscr {B}_f(x,\lambda )\in S\).
Observe that if \(I \subset \mathbb {R}\) is an interval and \(f=(f_1,f_2) :I \rightarrow \mathbb {R}^2\) satisfies conditions of Theorem 3 then the mean-value property for a Bajraktarević mean can be written as \(\mathscr {B}_{f}(x,\lambda )\in J\) for every subinterval \(J \subseteq I\), \(n \in \mathbb {N}\) and \((x,\lambda )\in J^n \times W_n\). This yields that every subinterval of I is f-convex. Furthermore, in view of continuity of f, the converse implication is also valid.
The first assertion characterizes f-convexity in terms of standard convexity.
Proposition 2
Let \(f :D \rightarrow X\) be an admissible function. Then \(S\subseteq D\) is f-convex if and only if \({{\,\textrm{cone}\,}}(f(S))\) is convex.
Proof
Assume first that S is f-convex. It suffices to show that for every \(n \in \mathbb {N}\) and a pair \((x,\lambda ) \in S^n \times W_n\) we have \(\xi :=\sum _{i=1}^n \lambda _if(x_i) \in {{\,\textrm{cone}\,}}(f(S))\). But \(\pi _f(\xi )=f(\mathscr {B}_f(x,\lambda ))\), thus \(\xi \in R_{f(\mathscr {B}_f(x,\lambda ))}\subseteq {{\,\textrm{cone}\,}}(f(S))\).
Conversely, if \({{\,\textrm{cone}\,}}(f(S))\) is convex then, as it is positively homogeneous we obtain \(r:=\sum _{i=1}^n \lambda _i f(x_i) \in {{\,\textrm{cone}\,}}(f(S))\) for every \(n \in \mathbb {N}\) and \((x,\lambda )\in S^n \times W_n\). By the definition of projection we obtain \(\pi _f(r) \in f(S)\) and therefore \(\mathscr {B}_f(x,\lambda )=f^{(-1)}(r)=f^{-1}\circ \pi _f(r) \in S\), which shows that S is f-convex. \(\square \)
Now we show that f-convex sets admit two very important properties of convex sets.
Lemma 4
Let \(f :D \rightarrow X\) be an admissible function. Then the class of f-convex subsets of D is closed with respect to intersection and chain union.
Proof
Let \(\mathcal {S}\) be an arbitrary family of f-convex subsets of D. Fix \(n \in \mathbb {N}\), and \((x,\lambda ) \in \big (\bigcap \mathcal {S}\big )^n \times W_n\). Then for every \(S \in \mathcal {S}\) we have \(x \in S^n\) and, in view f-convexity of S, we also have \(\mathscr {B}_f(x,\lambda )\in S\). Therefore \(\mathscr {B}_f(x,\lambda ) \in \bigcap \mathcal {S}\) which shows that \(\bigcap \mathcal {S}\) is f-convex.
Now take a chain \(\mathcal {Q}\) of f-convex sets. Take \(n \in \mathbb {N}\) and \((x,\lambda )\in (\bigcup \mathcal {Q})^n \times W_n\) arbitrarily. Then, by the chain property of \(\mathcal {Q}\), there exists \(Q \in \mathcal {Q}\) such that \(x \in Q^n\). As Q is f-convex, we obtain \(\mathscr {B}_f(x,\lambda )\in Q\subseteq \bigcup \mathcal {Q}\). Whence \(\bigcup \mathcal {Q}\) is f-convex subset of D, too. \(\square \)
Applying this lemma, for every admissible function \(f :D \rightarrow X\) and \(S \subset D\) we define f -convex hull of S as the smallest f-convex subset of D containing S and denote it by \({{\,\textrm{conv}\,}}_f(S)\). In the next lemma we show that, similarly to the ordinary convex hull, this definition can be also expressed as a set of all possible combinations of elements in S.
Lemma 5
Let \(f :D \rightarrow X\) be an admissible function and \(S \subseteq D\). Then
Proof
Denote the set on the right-hand-side of the latter equality by T. The inclusion \(T \subseteq {{\,\textrm{conv}\,}}_f(S)\) is the obvious implication of f-convexity of the hull. To prove the converse inclusion, we need to show that T is f-convex.
Let \(m\in \mathbb {N}\), \(y=(y_1,\dots ,y_m)\in T^m\) and \(\nu \in W_m\) be arbitrary. By the definition of T, in view of reduction priciple and Corollary 2 there exists \(n \in \mathbb {N}\), a vector \(x \in S^n\) and \(\Lambda =(\lambda ^{(1)},\dots ,\lambda ^{(n)}) \in W_n^m\) such that \(y_i=\mathscr {B}_f(x,\lambda ^{(i)})\) for all \(i \in \{1,\dots ,m\}\). Now, Corollary 2 implies that there exists \(\mu \in \mathbb {R}_+^m\) such that (4.2) holds. In particular for \(t:=\big (\tfrac{\nu _i}{\mu _i}\big )_{i=1}^m \in W_m\), we get
which shows that T is f-convex, indeed. \(\square \)
We now establish the fundamental relationship between the f-convex hull in D and the standard convex hull in X.
Proposition 3
Let \(f :D \rightarrow X\) be an admissible function and \(S \subseteq D\). Then
Proof
Observe that for every \(y \in {{\,\textrm{conv}\,}}_f(S)\) there exists \(n \in \mathbb {N}\) and \((x,\lambda )\in S^n \times W_n\) such that \(y=\mathscr {B}_f(x,\lambda )\). Then
Conversely, for every \(y \in f^{(-1)} \big ( {{\,\textrm{conv}\,}}(f(S)) \big )\) there exists \(n \in \mathbb {N}\) and \((x,\lambda )\in S^n \times W_n\) with \(\sum _{k=1}^n \lambda _k=1\) such that \(y=f^{(-1)} \big (\sum _{k=1}^n\lambda _kf(x_k)\big )\). Then, by the definition of \(\mathscr {B}_f\), we obtain \(y=\mathscr {B}_f(x,\lambda )\in {{\,\textrm{conv}\,}}_f(S)\) which completes the proof. \(\square \)
6 Equality of generalized Bajraktarević means
We now state our main result, which characterizes the equality of two generalized Bajraktarević means. In the one-dimensional case this is a classical result due to Aczél and Daróczy (1963) and Daróczy and Páles (1982).
Theorem 5
Let X and Y be linear spaces, D be an arbitrary set and \(f :D \rightarrow X\), \(g :D \rightarrow Y\) be admissible functions. Then \(\mathscr {B}_f=\mathscr {B}_g\) if and only if \(g=A\circ f\) for some linear map \(A:X\rightarrow Y\).
Proof
Take \(n \in \mathbb {N}\), a pair \((x,\lambda )\in D^n\times W_n\), and denote briefly \(y:=\mathscr {B}_f(x,\lambda )\in D\). By Lemma 2, applying A side-by-side in (3.2) and using the equality \(g=A\circ f\) twice, we get
Now the converse implication in Lemma 2 implies \(y=\mathscr {B}_g(x,\lambda )\). As x and \(\lambda \) are arbitrary, we obtain the equality \(\mathscr {B}_f=\mathscr {B}_g\).
To prove the converse implication assume that \(\mathscr {B}_f=\mathscr {B}_g\). Then by Corollary 3 we have \(\beta _f=\beta _g\). We shall use to following claim several times in the proof:
Claim 1
Let \(n \in \mathbb {N}\) and \((x,\lambda )\in D^n\times \mathbb {R}^n\) . Then
Proof
For \(\lambda \equiv 0\) the statement is trivial. From now on assume that \(\lambda \) is a nonzero vector and define
Then \(\lambda ^+\) and \(\lambda ^-\) are disjointly supported with nonnegative entries, and \(\lambda =\lambda ^+-\lambda ^-\).
By the first equality we have
Therefore as \(\lambda \) is nonzero and \(0\notin {{\,\textrm{conv}\,}}f(D)\), we obtain that both \(\lambda ^-,\lambda ^+ \in W_n\). Furthermore by the definition \(m:=\mathscr {B}_f(x,\lambda ^-)=\mathscr {B}_f(x,\lambda ^+)\) and \(\mu :=\beta _f(x,\lambda ^-)=\beta _f(x,\lambda ^+)\). Therefore as \(\mathscr {B}_f=\mathscr {B}_g\) and \(\beta _f=\beta _g\) we obtain
The second implication is analogous. Hence, the proof of Claim 1 is complete.
Denote the linear span of f(D) and g(D) by \(X_0\) and \(Y_0\), respectively. Let \(H_f\subseteq f(D)\) be a Hamel base for \(X_0\). Then one can choose a system of elements \(\{x_\gamma \mid \gamma \in \Gamma \}\subseteq D\) such that \(H_f=\{f(x_\gamma )\mid \gamma \in \Gamma \}\).
We are now going to show that \(H_g:=\{g(x_\gamma )\mid \gamma \in \Gamma \}\) is a Hamel base for \(Y_0\). Indeed, for every collection of pairwise-distinct elements \(\gamma _1,\dots ,\gamma _d \in \Gamma \), the system \(\{f(x_{\gamma _1}),\dots ,f(x_{\gamma _d})\}\) is linearly independent and thus, by our Claim, so is \(\{g(x_{\gamma _1}),\dots ,g(x_{\gamma _d})\}\).
To show that it is a Hamel base for \(Y_0\), we have to prove that \(H_g\) is also a generating system. If not, then there exists an element \(x^*\in D\) such that \(H_g\cup \{g(x^*)\}\) is linearly independent. Repeating the same argument (by interchanging the roles of f and g) it follows that \(H_f\cup \{f(x^*)\}\) is linearly independent, which contradicts that \(H_f\) is a generating system.
As \(H_f\) and \(H_g\) are Hamel bases for \(X_0\) and \(Y_0\), respectively, there exists a unique linear mapping \(A :X_0\rightarrow Y_0\) such that
Our aim is to extend the latter equality to all \(x \in D\). To this end, take \(x \in D\setminus D_\Gamma \) arbitrarily. Using that \(H_f\) is a Hamel base for \(X_0\), we can find elements \(\gamma _1,\dots ,\gamma _d\in \Gamma \) and nonzero real numbers \(\lambda _1,\dots ,\lambda _d\) such that
Then \(\sum _{i=1}^d \lambda _i f(x_{\gamma _i})-f(x)=0\), and by Claim 1 \(\sum _{i=1}^d \lambda _i g(x_{\gamma _i})-g(x)=0\). Finally we obtain
Therefore (6.2) holds for all \(x \in D\) which completes the proof. \(\square \)
7 Synergy
Before we introduce the notion of synergy let us present some interpretation of the aggregated effort. The initial issue of coalitions in decision making theory (and, more general, theory of cooperation in games) is the problem how to measure the coalition quality. Intiuitively, synergy is the difference between the aggregated effort and the sum of the individual efforts, i.e., the arithmetic effort. For the detailed study of synergy, we refer the reader to Schulz-Hardt and Mojzisch (2012) and references therein.
Example 4
In a toy model we have three parties in a parliament with a total number of 100 votes and three parties: Party A (\(\lambda _1\) votes), Party B (\(\lambda _2\) votes), Party C (\(\lambda _3\) votes). Assume that \(\lambda _1\ge \lambda _2\ge \lambda _3\). The are three possible coalitions AB, AC and BC. From the point of view of the dominant decision system (for example \(\mathscr {D}_{FDD}\)) each coalition above 50 votes, is equivalent to the same number, the smallest majority which is 51. Thus we have for all \(x \in D^2\) and \(i,j \in \{1,2,3\}\) with \(i \ne j\),
Now we could compare the sum of weights with the equivalent weight in two cases:
Situation I: \((\lambda _1,\lambda _2,\lambda _3)=(45,35,20)\):
Obviously, each party wants to be in a coalition. However A prefers C than B (as \(s_{AC}\ge s_{AB}\)) but both B and C prefer to make a coalition with each other (as \(s_{BC}\ge s_{AB}\) and \(s_{BC}\ge s_{AC}\)). Consequently the coalition BC is the unique Nash equilibrium.
Situation II: \((\lambda _1,\lambda _2,\lambda _3)=(55,30,15)\):
Then A does not want to make a coalition with either B or C (as the synergy is negative). Similarly neither B nor C wants to make a coalition with A (this essentially follows from the real situation). The coalition BC is irrelevant (which refers to the zero synergy).
Obviously, as it was announced, the examples above are instrumental to dominant decision systems only. For more complicated decision making systems, we need to define the synergy in a different way. In general, the synergy depends on the players’ decisions. There are essentially two important assertions:
-
(1)
zero synergy refers to the situation when aggregation is irrelevant to the rest of the system;
-
(2)
positive synergy should be profitable from the point of view of a decision making system.
In our model, for an effort function \(\mathscr {E}:\mathscr {W}(D)\rightarrow \mathbb {R}_+\), the \(\mathscr {E}\)-synergy is a function \(\sigma _\mathscr {E}:\mathscr {W}(D)\rightarrow \mathbb {R}\) defined as follows
In other words, \(\sigma _\mathscr {E}\) measures the difference between the given effort and the arithmetic effort, which is the sum of individual efforts.
If \(f:D\rightarrow X\) is an admissible function and \(\mathscr {E}=\beta _f\), then \(\sigma _\mathscr {E}\) will simply be denoted as \(\sigma _f\). Furthermore, in view of Corollary 3, we can see that the synergy depends only on the mean \(\mathscr {B}_f\), that is, the equality \(\mathscr {B}_f=\mathscr {B}_g\) implies \(\sigma _f=\sigma _g\). Therefore, we can define \(\sigma _{\mathscr {B}_f}:=\sigma _f\).
This property has an important interpretation in the theory of coalitional games. The case when the synergy is negative corresponds to the situation when there appear some distractions in the cooperation (see Example 4.II). The case of positive synergy refers to the situation when the aggregated effort of the group is greater then sum of efforts of the individuals (see Example 4.I).
7.1 Generalized quasi-arithmetic means
In the next lemma we characterize the subfamily of zero-synergy generalized Bajraktarević means. Its single variable counterpart was proved in Pasteczka (2021).
Theorem 6
Let \(f :D \rightarrow X\) be an admissible function. Then the following conditions are equivalent:
-
(i)
f(D) is a convex set and
$$\begin{aligned} { \mathscr {B}_f(x,\lambda )=f^{-1} \bigg (\frac{\sum _{i=1}^n \lambda _i f(x_i)}{\sum _{i=1}^n\lambda _i}\bigg )\qquad \text {for all }n \in \mathbb {N}\text { and }(x,\lambda )\in D^n \times W_n, }\end{aligned}$$(7.1)in particular the right hand side is well-defined for all such pairs;
-
(ii)
\(\sigma _f\equiv 0\);
-
(iii)
\(\mathscr {B}_f\) is associative, that is,
$$\begin{aligned} \mathscr {B}_f\big ((x,y),(\lambda ,\mu )\big ) =\mathscr {B}_f\big (\big (\mathscr {B}_f(x,\lambda ),y\big ),(\alpha (x,\lambda ),\mu ) \big ) \end{aligned}$$(7.2)for all pairs \((x,\lambda ),(y,\mu )\in \mathscr {W}(D)\) (where \(\alpha :\mathscr {W}(D)\rightarrow \mathbb {R}_+\) stands for the arithmetic effort function);
-
(iv)
Equality (7.2) holds for all \((x,\lambda )\in \mathscr {W}(D)\) and \((y,\mu )\in D\times \mathbb {R}_+\).
Proof
If D is a singleton, then all of the above conditions are satisfied. Therefore, we may assume that D has at least two distinct elements.
The implications \((i) \Rightarrow (ii)\), \((ii) \Rightarrow (iii)\), and \((iii) \Rightarrow (iv)\) are easy to check. To prove the implication \((iv) \Rightarrow (i)\), assume that \(\mathscr {B}_f\) satisfies (7.2) for all \((x,\lambda )\in \mathscr {W}(D)\) and \((y,\mu )\in D\times \mathbb {R}_+\).
Fix \(n \in \mathbb {N}\) and a pair \((x,\lambda ) \in D^n \times W_n\). We denote briefly \(\bar{x}:=\mathscr {B}_f(x,\lambda )\), \(\bar{\lambda }:=\beta _f(x,\lambda )\) and \(\bar{\alpha }:=\alpha (x,\lambda )\). Then we have that \(\sum _{i=1}^n \lambda _i f(x_i)=\bar{\lambda }f(\bar{x})\).
Now fix \(y \in D {\setminus }\{\bar{x}\}\) and \(\mu >0\). Applying the delegativity of \(\mathscr {B}_f\) and condition (iv), we have
Consequently \(\bar{\lambda }f(\bar{x})+\mu f(y)\) and \(\bar{\alpha }f(\bar{x})+\mu f(y)\) are on the same ray, i.e., there exists a constant \(C>0\) such that
which reduces to
As \(y \ne \bar{x}\), the admissibility implies that f(y) and \(f(\bar{x})\) are linearly independent. Consequently, the above equality implies \(C=1\) and \(\bar{\lambda }=\bar{\alpha }\). Thus,
which implies that f(D) is a convex set. Finally, applying \(f^{-1}\) side-by-side, we get that (7.1) holds. \(\square \)
7.2 Gini means
We are now going to calculate the sign of the synergy for Gini means. Before we go into the details, we recall a few properties of this family. First, it is easy to observe that \(\mathscr {G}_{p,q}=\mathscr {G}_{q,p}\) for all \(p,q \in \mathbb {R}\). Furthermore, in a case \(q=0\), the Gini mean \(\mathscr {G}_{p,0}\) equals the p-th Power mean (in particular, it is associative). These means are monotone with respect to their parameters, more precisely, for all \(p,q,r,s \in \mathbb {R}\), we have that \(\mathscr {G}_{p,q}\le \mathscr {G}_{r,s}\) if and only if \(\min (p,q)\le \min (r,s)\) and \(\max (p,q)\le \max (r,s)\) (cf. Daróczy and Losonczi (1971)). Finally, a Gini mean \(\mathscr {G}_{p,q}\) is monotone as a mean (in each of its argument) if and only if \(pq \le 0\) (see Losonczi (1971a, 1971b)). We show that the sign of pq is also important in characterizing the sign of their synergy.
Proposition 4
Sign of the synergy of the Gini mean \(\mathscr {G}_{p,q}\) coincides with that of \(-pq\). More precisely, for all \(p,q \in \mathbb {R}\), \(n\in \mathbb {N}\), nonconstant vector \(x\in \mathbb {R}_+^n\) and \(\lambda \in \mathbb {R}_+^n\), we have \({{\,\textrm{sign}\,}}\big (\sigma _{\mathscr {G}_{p,q}}(x,\lambda )\big )=-{{\,\textrm{sign}\,}}(pq)\).
Proof
If \(pq=0\), then \(\mathscr {G}_{p,q}\) is associative and thus Lemma 6 implies \(\sigma _{\mathscr {G}_{p,q}}\equiv 0\). From now on assume that \(pq\ne 0\). Fix \(n \in \mathbb {N}\), \(\lambda \in \mathbb {R}_+^n\) and nonconstant vector \(x\in \mathbb {R}_+^n\). Let
Assume first that \(p \ne q\). As \(\gamma _{p,q}=\gamma _{q,p}\), without loss of generality, we can assume that \(p>q\). Then by (3.6), we have
Whence, by the definition of synergy,
In view of the inequality \(p >q\), we obtain
For \(pq<0\) we obtain that \(\sigma _{\mathscr {G}_{p,q}}(x,\lambda ) > 0\) is equivalent to \(\big (\tfrac{\varphi _q}{\varphi _0}\big )^{1/q}< \big (\tfrac{\varphi _p}{\varphi _0}\big )^{1/p}\). But the last inequality is just the equality between power means. Thus we have \(\sigma _{\mathscr {G}_{p,q}}(x,\lambda ) > 0\) whenever \(pq<0\).
If \(pq>0\) then \(\sigma _{\mathscr {G}_{p,q}}(x,\lambda ) > 0\) is equivalent to \(\big (\tfrac{\varphi _q}{\varphi _0}\big )^{1/q} > \big (\tfrac{\varphi _p}{\varphi _0}\big )^{1/p}\). But, as \(p>q\) we know that the converse inequality holds. So in this case we obtain \(\sigma _{\mathscr {G}_{p,q}}(x,\lambda ) < 0\).
In the last case, when \(p=q\ne 0\), we have
Therefore
We can apply the strictly decreasing mapping \(\mathbb {R}_+ \ni \xi \mapsto {{\,\textrm{sign}\,}}(p)\xi ^{-1/p}\) side-by-side to obtain
But the inequality on the right-hand-side holds for all \(p\in \mathbb {R}{\setminus }\{0\}\), which completes the proof. \(\square \)
Remark
Observe that Gini mean has a positive synergy if the graph of \(\gamma _{p,q}\) is hyperbolic and negative for parabolic graphs. In the case of hyperboloid in Example 3 the synergy was also positive.
References
Abd El-Wahed, W. F., & Abo-Sinna, M. A. (2001). A hybrid fuzzy-goal programming approach to multiple objective decision making problems. Fuzzy Sets and Systems, 119(1), 71–85.
Aczél, J., & Daróczy, Z. (1963). Über verallgemeinerte quasilineare Mittelwerte, die mit Gewichtsfunktionen gebildet sind. Publicationes Mathematicae Debrecen, 10, 171–190.
Bajraktarević, M. (1958). Sur une équation fonctionnelle aux valeurs moyennes. Glasnik Mat.-Fiz. Astronom. Društvo Mat. Fiz. Hrvatske Ser. II, 13:243-248.
Bajraktarević, M. (1963). Sur une généralisation des moyennes quasilinéaires. Publications de l’Institut Mathématique(Beograd) (N.S.), 3 (17):69-76.
Beliakov, G., Bustince Sola, H., & Calvo Sánchez, T. (2016). A practical guide to averaging functions, Vol. 329 of Studies in Fuzziness and Soft Computing. Springer, Cham.
Beliakov, G., Pradera, A., & Calvo, T. (2007). Aggregation functions: A guide for practitioners. Cham: Springer.
Bessenyei, M., & Páles, Zs. (2003). Hadamard-type inequalities for generalized convex functions. Mathematical Inequalities and Applications, 6(3), 379–392.
Bullen, P. S. (2003). Handbook of means and their inequalities Mathematics and its applications (Vol. 560). Dordrecht: Kluwer Academic Publishers Group.
Bullen, P.S., Mitrinović, D.S., & Vasić, P.M. (1988). Means and Their Inequalities, Vol. 31 of Mathematics and its Applications (East European Series). D. Reidel Publishing Co., Dordrecht. Translated and revised from the Serbo-Croatian.
Couceiro, M., Devillet, J., & Marichal, J.-L. (2018). Characterizations of idempotent discrete uninorms. Fuzzy Sets and Systems, 334, 60–72.
Czyżak, P. (1990). Application of the “FLIP” method to farm structure optimization under uncertainty. In Stochastic versus fuzzy approaches to multiobjective mathematical programming under uncertainty, Vol. 6 of Theory Decis. Lib. Ser. D System Theory Knowledge Engrg. Probl. Solving, pp 263–278. Kluwer Acad. Publ., Dordrecht.
Daróczy, Z., & Losonczi, L. (1971). Über den Vergleich von Mittelwerten. Publicationes Mathematicae Debrecen, 17(289–297), 1970.
Daróczy, Z., & Páles, Zs. (1982). On comparison of mean values. Publicationes Mathematicae Debrecen, 29(1–2), 107–115.
Devillet, J. (2019). Bisymmetric and quasitrivial operations: Characterizations and enumerations. Aequationes Mathematicae, 93(3), 501–526.
Devillet, J., Kiss, G., & Marichal, J.-L. (2019). Characterizations of quasitrivial symmetric nondecreasing associative operations. Semigroup Forum, 98(1), 154–171.
Gini, C. (1938). Di una formula compressiva delle medie. Metron, 13, 3–22.
Gini, C. (1958). Le medie. Milano: Unione Tipografico-Editrice Torinese.
Grabisch, M., Marichal, J.-L., Mesiar, R., & Pap, E. (2009). Aggregation functions Encyclopedia of mathematics and its applications (Vol. 127). Cambridge: Cambridge University Press.
Henson, R. N. A. (1998). Short-term memory for serial order: The start-end model. Cognitive Psychology, 36(2), 73–137.
Huber, J., Payne, J. W., & Puto, C. (1982). Adding asymmetrically dominated alternatives: Violations of regularity and the similarity hypothesis. Journal of Consumer Research, 9(1), 90–98.
Jiuping, Xu., & Zhou, Xiaoyang. (2011). Fuzzy-like multiple objective decision making Studies in Fuzziness and Soft Computing (Vol. 263). Berlin: Springer-Verlag.
Losonczi, L. (1971). Subadditive Mittelwerte. Archiv der Mathematik (Basel), 22, 168–174.
Losonczi, L. (1971). Über eine neue Klasse von Mittelwerten. Acta Scientiarum Mathematicarum (Szeged), 32, 71–81.
Páles, Zs. (1987). On the characterization of quasi-arithmetic means with weight function. Aequationes Mathematicae, 32(2–3), 171–194.
Páles, Zs., & Pasteczka, P. (2018). On Kedlaya-type inequalities for weighted means. Journal of Inequalities and Applications, 2018, 1–22.
Pasteczka, P. (2021). Online premeans and their computation complexity. Results in Mathematics, 76(3), 141.
Schulz-Hardt, S., & Mojzisch, A. (2012). How to achieve synergy in group decision making: Lessons to be learned from the hidden profile paradigm. European Review of Social Psychology, 23(1), 305–343.
Słowiński, R., & Teghem, J., editors. (1990). Stochastic versus fuzzy approaches to multiobjective mathematical programming under uncertainty, Vol. 6 of Theory and Decision Library. Series D: System Theory, Knowledge Engineering and Problem Solving. Kluwer Academic Publishers Group, Dordrecht.
Tzeng, Gwo-Hshiung., & Huang, Jih-Jeng. (2014). Fuzzy multiple objective decision making. Boca Raton, FL: CRC Press.
Acknowledgements
The authors are very thankful to the anonymouos referee for his/her comments on the manuscript which helped us to provide additional explanations and examples to improve the readability and the presentation of the paper.
Funding
Open access funding provided by University of Debrecen. The research of the first author was supported by the K-134191 NKFIH Grant.
Author information
Authors and Affiliations
Contributions
Both authors contributed equally to the manuscript, read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Páles, Z., Pasteczka, P. Decision making via generalized Bajraktarević means. Ann Oper Res 332, 461–480 (2024). https://doi.org/10.1007/s10479-023-05582-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10479-023-05582-1
Keywords
- Decision making function
- Aggregation function
- Effort function
- Synergy
- Generalized Bajraktarević mean
- Equality problem