
Abstract
This paper is dedicated to studying the steady state problem of a population-toxicant model with negative toxicant-taxis, subject to homogeneous Neumann boundary conditions. The model captures the phenomenon in which the population migrates away from regions with high toxicant density towards areas with lower toxicant concentration. This paper establishes sufficient conditions for the non-existence and existence of non-constant positive steady state solutions. The results indicate that in the case of a small toxicant input rate, a strong toxicant-taxis mechanism promotes population persistence and engenders spatially heterogeneous coexistence (see, Theorem 2.3). Moreover, when the toxicant input rate is relatively high, the results unequivocally demonstrate that the combination of a strong toxicant-taxis mechanism and a high natural growth rate of the population fosters population persistence, which is also characterized by spatial heterogeneity (see, Theorem 2.4).
Similar content being viewed by others


1 Introdution
The investigation of population-toxicant interactions within polluted aquatic environments has garnered significant attention. Extensive research has been conducted on this topic, with studies such as [12–14, 16, 17, 26, 34] focusing on ordinary differential equation models, and [9, 15, 32, 33] concerning matrix population models. Additionally, reaction-advection-diffusion equation models have been considered in works like [35, 38, 39], which involve the influence of unidirectional water flow on population dispersal. However, the movement of populations can also be influenced by toxicants. For instance, populations may exhibit a tendency to migrate from regions with high toxicant concentrations to areas with lower concentrations, thereby enhancing their chances of survival [37].
To describe this phenomena, Deng et al. [6] introduced the following diffusive population-toxicant model with negative toxicant-taxis:
where \(\Omega \subset \mathbb{R}^{2}\) is a bounded domain with a smooth boundary. \(u:=u(x,t)\) and \(w:=w(x,t)\) represent the population density and toxicant concentration, respectively, at position \(x\) and time \(t\). The positive constants \(d_{1}\) and \(d_{2}\) describe the diffusion rates of the population and toxicant, respectively. The term \(+\chi \nabla \cdot (u\nabla w)\) denotes the negative toxicant-taxis, which indicates that the population retreats from the area of high density of toxicant to the region with lower toxicant concentration with a taxis coefficient \(\chi >0\). The function \((r-mw)\) (where \(r\) and \(m\) are both positive constants) represents the toxicant-dependent intrinsic growth rate of the population, and \(r\) corresponds to the natural growth rate of the population. The term \(- u^{2}\) describes the competition between populations. Additionally, the positive constant \(h\) accounts for the input rate of the toxicant. The parameters \(g>0\) and \(b>0\) represent the decay rate of the toxicant and the uptake rate by the population, respectively.
The solution behaviors of (1.1), including boundedness, globally asymptotical stability, and pattern formation, were explored in the work [6]. More precisely, when \(h\) is large enough, the population will go extinct. Conversely, for a small \(h\), [6] demonstrated that the population and the toxicant would reach a spatially homogeneous coexistence state. This coexistence state is achieved when \(\chi >0\) is small. For the case of \(\chi >0\) being large, the authors numerically illustrated the occurrence of spatially heterogeneous coexistence, characterized by non-constant positive steady states. However, the rigorous proof of the existence of such non-constant positive steady state solutions of (1.1) remains an open problem. Additionally, it is still unclear whether the population and the toxicant will achieve a (spatially homogeneous/inhomogeneous) coexistence state when the toxicant input rate is at a moderate level.
To address the above-mentioned questions, this paper considers the stationary problem of (1.1)
and focuses on the following mathematical question:
-
The non-existence and existence of non-constant positive solutions for (1.2).
Investigating the (non-) existence of non-constant positive steady state solutions can shed light on the intricate interactions between toxicant input, degradation, population growth, and toxicant-taxis, and how these factors collectively impact population persistence. The results are a new and meaningful endeavor in this direction. Specifically, Theorem 2.3 rigorously proves that in the case of a small toxicant input rate, a strong toxicant-taxis mechanism promotes population persistence and engenders spatially heterogeneous coexistence of the toxicant and the population, which solves an open question in [6]. Furthermore, Theorem 2.4 unequivocally demonstrates that, under relatively high toxicant input rates, the combined effect of a strong toxicant-taxis mechanism and a high natural growth rate of population fosters population persistence characterized by spatial heterogeneity. This finding is new.
Numerous studies have been conducted on the existence of non-constant positive solutions to elliptic systems. For example, the works [18, 19] involved the application of the singular perturbation method, and research [2, 4, 5, 10, 22] used the bifurcation technique. In addition, the Leray-Schauder degree theorem, as a variation of the bifurcation approach, is also a powerful technique to investigate the existence of non-constant positive solutions (see [3, 7, 8, 20, 23–25, 28, 29, 36] and references therein). In this work, the existence of non-constant positive solutions to (1.2) is established by employing this approach.
In the sequel, all solutions under consideration are assumed to be classical solutions. The rest of this paper will be organized as follows: Sect. 2 presents the main results, while Sect. 3 establishes a priori estimates for positive solutions of (1.2). The sufficient conditions for the non-existence and existence of non-constant positive steady state solutions of (1.1) are discussed in Sect. 4 and Sect. 5, respectively. Section 6 provides simulations to validate the theoretical findings.
2 Main Results
The main results for (1.1) encompass two parts: the sufficient conditions for non-existence and existence of non-constant positive steady states of (1.1) (i.e., non-constant positive solutions of (1.2)). Before presenting the main results, we note that the non-negative constant solutions of (1.2) fulfill
which can be solved to obtain the following cases:
-
semi-coexistence steady state: \((0,\frac{h}{g})\);
-
coexistence steady states: \((u_{1},w_{1})\), \((u_{2},w_{2})\) and \((u_{3},w_{3})\)
with \((u_{i},w_{i})~(i=1,2,3)\) are defined as:
The conditions of existence for these constant steady states are presented in Table 1.
In the sequel, the non-existence results are first presented. Subsequently, the notations employed in the existence theorems are introduced, followed by the existence results.
2.1 Non-existence of Non-constant Positive Steady States
This subsection first gives the non-existence result in the regions \(\frac{gr}{m}\leq h\) with \(r<\frac{g}{b}\) and \(\frac{(g+br)^{2}}{4bm}\leq h\) with \(r\geq \frac{g}{b}\), where only admits constant semi-coexistence steady state. Theorem 2.2 (i) in [6] shows that \((0,\frac{h}{g})\) is globally asymptotically stable, which implies the following statements directly.
Proposition 2.1
Assume one of the following conditions holds
-
(1)
\(0< r<(\sqrt{2}-1)\frac{g}{b}\) and \(h\in \big[\frac{gr}{m},\infty \big)\);
-
(2)
\((\sqrt{2}-1)\frac{g}{b}\leq r<\frac{g}{b}\) and \(h\in \big[\frac{gr}{m},\frac{g^{2}}{bm}\big)\cup \big( \frac{2gr+br^{2}}{m},\infty \big)\);
-
(3)
\(\frac{g}{b}\leq r\) and \(h\in \big(\frac{2gr+br^{2}}{m},\infty \big)\).
Then for any fixed parameters \(\chi \), \(b\), \(g\), \(r\), \(m\), \(h\), \(d_{1}\), \(d_{2}\), (1.1) has no non-constant positive steady state solution.
In the left cases \(0< h<\frac{gr}{m}\) and \(\frac{gr}{m}\leq h\leq \frac{(g+br)^{2}}{4bm}\) with \(r>\frac{g}{b}\), the following results show that (1.1) has no non-constant positive steady state solutions if \(d_{1}\) is large.
Theorem 2.2
Assume \(0< h<\frac{gr}{m}\) or \(\frac{gr}{m}\leq h\leq \frac{(g+br)^{2}}{4bm}\) with \(r>\frac{g}{b}\), and let \(\lambda _{1}\) be the smallest positive eigenvalue of \(- \Delta \) on \(\Omega \) under the homogeneous Neumann boundary condition. Then for any fixed parameters \(\chi \), \(b\), \(g\), \(r\), \(m\), \(h\), \(d_{2}\), there admits a positive constant \(D:=D(d_{2}, \chi , b, g, m, r, h, \lambda _{1})\) such that (1.1) has no non-constant positive steady state solution if \(d_{1}\geq D\).
Remark 2.1
In fact, for \(h\in \big[\frac{g^{2}}{bm},\frac{2gr+br^{2}}{m}\big]\) with \((\sqrt{2}-1)\frac{g}{b}\leq r<\frac{g}{b}\) and \(h\in \big(\frac{(g+br)^{2}}{4bm}, \frac{2gr+br^{2}}{m}\big]\) with \(r\geq \frac{g}{b}\), Theorem 2.2 remains applicable. However, when \(d_{1}< D\), the non-existence/existence of non-constant steady states in these remaining regions is unclear due to technical obstacles, which remain open for future investigations.
Hence, it is natural to ask whether the non-constant positive steady state solution will exist when parameters outside the non-existence regimes found in Theorem 2.2? To explore this question, we shall apply the Leray-Schauder degree theorem for the parameters regions where exist constant positive steady state solutions (i.e., \(0< h<\frac{gr}{m}\) and \(\frac{gr}{m}\leq h\leq \frac{(g+br)^{2}}{4bm}\) with \(r>\frac{g}{b}\)) and get positive answers.
2.2 Existence of Non-constant Positive Steady States
Before stating the existence results, some notations are introduced for clarity and simplicity.
-
Denote
$$ X_{i}^{\pm}(d_{1})=\frac{J_{i}\pm \sqrt{J_{i}^{2}-4K_{i}}}{2},~i=1,2,3, $$(2.5)where
$$ \begin{aligned} J_{i}&:=\frac{g+bu_{i}}{d_{2}}-\frac{u_{i}}{d_{1}d_{2}}(\chi bw_{i}-d_{2}), \\ K_{i}&:=\frac{u_{i}}{d_{1}d_{2}}(g+bu_{i}-mbw_{i}). \end{aligned} $$(2.6)
-
Let
$$ 0=\lambda _{0}< \lambda _{1}< \lambda _{2}< \lambda _{3}< \cdots < \lambda _{j}< \cdots \rightarrow \infty $$be the eigenvalues of \(-\Delta \) on \(\Omega \) subject to the homogeneous Neumann boundary condition.
-
Denote
$$ \begin{aligned} &\ell _{1}:=\frac{u_{2}}{(g+bu_{2})^{2}}\left \{\sqrt{(g+bu_{2}-bmw_{2})d_{2}}- \sqrt{bw_{2}(g\chi +bu_{2}\chi -md_{2})}\right \}^{2}, \\ &\ell _{2}:=\frac{u_{3}(\chi bw_{3}-d_{2})}{g+bu_{3}}, \\ &j_{0}:=\min \{j\in \mathbb{N}:q_{2}< \lambda _{j}\} (\geq 1), \\ &k_{0}:=\min \{k\in \mathbb{N}:q_{1}< \lambda _{k}\} (\geq 1). \end{aligned} $$Here
$$ \begin{aligned} q_{1} &:=\frac{g+bu_{2}-bmw_{2}}{\chi bw_{2}-d_{2}}, \\ q_{2} &:= \frac{g+bu_{2}-bmw_{2}+\sqrt{(g+bu_{2}-bmw_{2})(g\chi +bu_{2}\chi -md_{2})bw_{2}/d_{2}}}{\chi bw_{2}-d_{2}}. \end{aligned} $$(2.7) -
Define the following sequences
$$ \begin{aligned} &D_{j}:= \textstyle\begin{cases} \sup \left\{d_{1}>0:X_{2}^{-}(d_{1})< -\lambda _{j}\right\}, & \text{ for } j=j_{0},j_{0}+1, \ldots \\ \ell _{1}, & \text{ for } j=j_{0}-1, \end{cases}\displaystyle \\ &\widetilde{D}_{k}:= \textstyle\begin{cases} \inf \left\{d_{1}>0:X_{2}^{+}(d_{1})< -\lambda _{k}\right\}, & \text{ for } k_{0} \leq k\leq j_{0}-1, \\ 0, &\text{ for } k=k_{0}-1, \\ \ell _{1},& \text{ for } k=j_{0}, \end{cases}\displaystyle \end{aligned} $$$$ \begin{aligned} &E_{i}:= \textstyle\begin{cases} \sup \left \{d_{1}>0:X_{1}^{-}(d_{1})< -\lambda _{i} \right \}, & \text{ for } i=1,2,\ldots \\ \infty , &\text{ for } i=0, \end{cases}\displaystyle \\ &\widetilde{E}_{n}:= \textstyle\begin{cases} \sup \left \{ d_{1}>0: X_{3}^{-}(d_{1})< -\lambda _{n} \right \}, & \text{ for } n=1,2,\ldots \\ \ell _{2}, &\text{ for } n=0. \end{cases}\displaystyle \end{aligned} $$
Based on the aforementioned notations, we shall show the existence results.
Theorem 2.3
If \(0< h<\frac{gr}{m}\) and \(\chi >\frac{d_{2}}{bw_{2}}\), then (1.1) admits at least one non-constant positive steady state solution provided that \(d_{1}\in (D_{j+1}, D_{j})\cap (\widetilde{D}_{k},\widetilde{D}_{k+1})\) and \(j+k+2\) is odd, where the integers \(j\geq j_{0}-1\geq k\geq k_{0}-1\).
Theorem 2.4
Let \(\chi > \frac{d_{2}}{bw_{2}}\) and \(r>\frac{g}{b}\). Then (1.1) admits at least one non-constant positive steady state solution provided that one of the following conditions holds:
-
(c1)
\(\frac{gr}{m}< h<\frac{(g+br)^{2}}{4bm}\), and \(d_{1}\in (E_{i+1}, E_{i})\cap (D_{j+1}, D_{j})\cap (\widetilde{D}_{k}, \widetilde{D}_{k+1})\) as well as \(i+j+k+2\) is odd, where the integers \(i\geq 0\), \(j\geq j_{0}-1\geq k\geq k_{0}-1\);
-
(c2)
\(h=\frac{(g+br)^{2}}{4bm}\), and \(d_{1}\in (\widetilde{E}_{n+1},\widetilde{E}_{n})\) as well as \(n+1\) is odd \((n\geq 0)\).
Remark 2.2
The following statements hold:
-
Let \(\chi >\frac{d_{2}}{bw_{2}}\). If \(0< h<\frac{gr}{m}\) or \(\frac{gr}{m}< h<\frac{(g+br)^{2}}{4bm}\) with \(r>\frac{g}{b}\), one can check that \(\ell _{1},~q_{1},~q_{2}>0\), \(j_{0}\geq k_{0}\) and
$$ \begin{aligned} &0\leftarrow \cdots < D_{j}< \cdots < D_{j_{0}+1}< D_{j_{0}}< \ell _{1}=:D_{j_{0}-1}, \\ &0=\widetilde{D}_{k_{0}-1}< \widetilde{D}_{k_{0}}< \widetilde{D}_{k_{0}+1}< \cdots < \widetilde{D}_{j_{0}-1}< \widetilde{D}_{j_{0}}=\ell _{1} \text{ for }j_{0}>k_{0}. \end{aligned} $$ -
When \(\frac{gr}{m}< h<\frac{(g+br)^{2}}{4bm}\), \(r>\frac{g}{b}\) and \(\chi >\frac{d_{2}}{bw_{2}}\), the monotonicity of \(X_{1}^{-}(d_{1})\) and \(\lambda _{k}\) indicates that
$$ \begin{aligned} &0\leftarrow \cdots < E_{i}< \cdots < E_{2}< E_{1}< \infty =:E_{0}. \end{aligned} $$ -
If \(h=\frac{(g+br)^{2}}{4bm}\) with \(r>\frac{g}{b}\) and \(\chi >\frac{d_{2}}{bw_{3}}\), one can verify that \(\ell _{2}>0\) and the sequence \(\{\widetilde{E}_{n}\}_{n=1}^{\infty}\) satisfies
$$ 0\leftarrow \cdots < \widetilde{E}_{n}< \cdots < \widetilde{E}_{2}< \widetilde{E}_{1}< \ell _{2}=:\widetilde{E}_{0}. $$Furthermore, one has \(u_{1}=u_{2}=u_{3}\), \(\ell _{2}=\ell _{1}\), \(X_{1}^{-}(d_{1})=X_{2}^{-}(d_{1})=X_{3}^{-}(d_{1})\), \(q_{1}=q_{2}=0\), \(j_{0}=1\) and hence \(E_{j}=D_{j}=\widetilde{E}_{j}\) for \(j\geq 1\).
Remark 2.3
Based on the above results and Theorem 2.2 (ii) in [6], there is a constant
such that
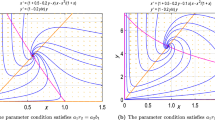
For such \(d_{1}\) that also satisfies the conditions outlined in Theorem 2.3 - 2.4, one can visually depict the regions where non-constant positive steady state solutions to (1.1) exist or do not exist, for \(\chi \leq \chi _{c}\) or \(\chi >\frac{ad_{2}}{bw_{2}}\), see in Fig. 1.

The schematic of existence/non-existence regions of non-constant positive steady states
3 A Priori Estimates
This section aims to give a priori estimates of solutions to (1.2). The first lemma shows the upper bound.
Lemma 3.1
Let \((u, w)\) be any positive solution to (1.2). Then \((u, w)\) satisfies
for all \(x\in \bar{\Omega}\).
Proof
Let \(x_{1}\in \bar{\Omega}\) satisfy \(w(x_{1})=\max _{\bar{\Omega}} w(x)\). Then applying the maximum principle [23], one has
which implies \(w(x_{1})\leq \frac{h}{g}\). Hence, \(\max _{\bar{\Omega}} w(x)\leq \frac{h}{g}\) for all \(x\in \bar{\Omega}\).
Note that
Then setting \(V=ue^{\frac{\chi w}{d_{1}}}\), (1.2) can be reduced to
Suppose \(x_{2}\in \bar{\Omega}\) is a maximum point of \(V:V(x_{2})=\max _{\bar{\Omega}} V(x)\).
Case 1: \(x_{2}\in \Omega \). Since \(V(x_{2})=\max _{\bar{\Omega}} V(x)\), one has \(\nabla V(x_{2})=0\) and \(\Delta V(x_{2})\leq 0\), therefore
It follows from the first equation of (3.2) that
which gives \(\max _{\bar{\Omega}} V(x)\leq re^{\frac{\chi h}{d_{1}g}}\) for all \(x\in \bar{\Omega}\). Since \(V(x)=u(x)e^{\frac{\chi {w(x)}}{d_{1}}}\), one obtains
Case 2: \(x_{2}\in \partial \Omega \). Suppose \(q(x_{2}):=r-mw(x_{2})-V(x_{2})e^{-\frac{\chi w}{d_{1}}}< 0\). By the continuity of \(w\), \(V\) and \(q(x)\), one can find a small ball \(U\) in \(\bar{\Omega}\) with \(\partial U\cap \partial \Omega =\{x_{2}\}\) such that
Hence, \(\nabla \cdot (e^{-\frac{\chi w}{d_{1}}}\nabla V)>0\) for all \(x\in U\). Due to \(V(x_{2})=\max _{\bar{\Omega}} V(x)\), then the Hopf Boundary lemma [31] yields \(\frac{\partial V}{\partial \nu}\bigg|_{x=x_{2}}>0\). This is a contradiction to the condition \(\frac{\partial V}{\partial \nu}\bigg|_{x\in \partial \Omega}=0\). Therefore, one has
Proceeding the same procedure as Case 1, one gets \(\max _{\bar{\Omega}} u(x)\leq re^{\frac{\chi h}{d_{1}g}}\) for all \(x\in \bar{\Omega}\) directly.
Integrating the first equation of (1.2) and applying Young’s inequality, one obtains \(\frac{1}{|\Omega |}\int _{\Omega }u\leq r\). Hence, the proof of Lemma 3.1 is completed. □
Lemma 3.2
Let \(\varepsilon >0\) be any fixed positive constant, \(d_{1},d_{2}\geq \varepsilon \) and \((u, w)\) be any positive solution to (1.2). Then there admits a constant \(M:=M(\varepsilon ,\chi ,r,m,g,h,b,|\Omega |)>0\) such that for any \(p\geq 1\)
Proof
Set positive constants \(M_{i}:=M_{i}(\varepsilon ,\chi ,r,m,g,h,b,|\Omega |)\) with \(i=1,2,\ldots ,7\). It follows from Lemma 3.1 that
for any \(p\geq 1\). Then the \(L^{p}\)-theory of elliptic equations (see, e.g., [11, Theorem 8.33]) implies that there is a constant \(M_{2}>0\) such that
which, along with Sobolev embedding, gives \(\|w\|_{C^{1,\alpha}(\Omega )}\leq M_{3}\) with some constant \(0< \alpha <1\).
Next, we shall show the \(W^{2,p}\) – bound of \(u\). Applying the elliptic regularity to (3.2), one has
The fact \(V=ue^{\frac{\chi w}{d_{1}}}\) implies that
and hence
On the other hand, we can rewrite the first equation in (1.2) as
Then Lemma 3.1, (3.3) and (3.4) ensure that we can find a constant \({M_{6}}>0\) such that
for any \(p\geq 1\). By utilizing the \(L^{p}\)-theory of elliptic equations (see, e.g., [11, Theorem 8.33]) once again, we can obtain a constant \({M_{7}}>0\) such that \(\| u\|_{W^{2, p}(\Omega )}\leq M_{7}\). This allows us to complete the proof of Lemma 3.2. □
4 Non-existence of Non-constant Positive Steady States
In this section, we shall show the sufficient condition for the non-existence of non-constant positive steady state solutions in the parameter regions where \(0< h<\frac{gr}{m}\) and \(\frac{gr}{m}\leq h\leq \frac{(g+br)^{2}}{4bm}\) with \(r>\frac{g}{b}\).
Proof of Theorem 2.2
Let \((\bar{u},\bar{w}):=\frac{1}{|\Omega |}(\int _{\Omega }u, \int _{ \Omega }w)\). Multiplying the first equation of (1.2) by \(u-\bar{u}\), noting \(\int _{\Omega }(u-\bar{u})=0\) and using Young’s inequality, \(0< u\leq re^{\frac{\chi h}{d_{1} g}}\) and \(\bar{u}\leq r\), we have
By Poinaré-Wirtinger inequality \(\lambda _{1}\|v-\bar{v}\|_{L^{2}(\Omega )}^{2}\leq \|\nabla v\|_{L^{2}( \Omega )}\) for any \(v\in H^{1}(\Omega )\), where \(\lambda _{1}\) is the smallest positive eigenvalue of \(- \Delta \) on \(\Omega \) under the homogeneous Neumann boundary condition and \(\bar{v}:=\frac{1}{|\Omega |}\int _{\Omega }v\), it follows from (4.1) that
The second equation of (1.2) gives
where we have used Young’s inequality and (3.1). Applying Poinaré-Wirtinger inequality again, we update the above inequality as
which substituted into (4.2) indicates
with \(H(d_{1}):=d_{1}- \frac{rb^{2}h^{2}\chi ^{2}}{16g^{3}d_{2}\lambda _{1}}e^{ \frac{2\chi h}{d_{1}g}}-\frac{r}{\lambda _{1}}\left ( \frac{b^{2}h^{2}m^{2}}{16g^{3}d_{2}\lambda _{1}}+\lambda _{1}+1 \right )\).
Denote
then \(F(d_{1})>0\) and \(F_{d_{1}}(d_{1})<0\). Therefore, there admits a unique positive constant \(D:=D(d_{2}, \chi , b, g, m, r, h, \lambda _{1})\) such that \(d_{1}>F(d_{1})~\text{for all}~d_{1}\geq D\). This implies \(0\leq H(d_{1})\|\nabla u\|_{L^{2}(\Omega )}^{2}\leq 0\) and hence \(u\) is constant. It follows from (4.3) that \(w\) is also constant. The proof is completed. □
5 Existence of Non-constant Positive Steady States
In this section, we shall prove the existence of non-constant positive solutions of (1.2). Before proceeding, we introduce some notations used later. Let \(0=\lambda _{0}<\lambda _{1}<\lambda _{2}<\lambda _{3}<\cdots \) be the eigenvalues of \(-\Delta \) on \(\Omega \) subject to the homogeneous Neumann boundary condition, \(E(\lambda _{k})\) be the eigenspace respect to \(\lambda _{k}\) in \(C^{1}(\bar{\Omega})\) and \(\left \{\varphi _{kj}:j=1,2,\ldots ,\operatorname{dim} E(\lambda _{k}) \right \}\) be an orthonormal basis of \(E(\lambda _{k})\). Then
where \(Y_{kj}=\left \{\mathbf{c} \varphi _{kj},\mathbf{c} \in \mathbb{R}^{2} \right \}\).
Plugging \(\Delta w=\frac{gw+buw-h}{d_{2}}\) into the first equation of (1.2), we can reduce (1.2) as
which is equivalent to
Here \(\mathbf{u}:=(u,w)\in Y\), \((I-\Delta )^{-1}\) denotes the inverse of \(I-\Delta \) under homogeneous Neumann boundary condition and the operator
Then \(\mathbf{u}\) is a solution to (1.2) iff \(\mathbf{u}\) satisfies
where \(\mathbf{F}(\cdot):=I-\mathbf{H}(\cdot )\) and \(\mathbf{H}(\cdot )\) is a compact operator from \(Y\) to itself.
To get a non-constant positive solution of (5.3), we shall use the Leray-Schauder degree theory to the operator \(\mathbf{F}\) in a subset of \(Y\). To this end, we need to introduce a bounded set and check the condition for the application of the Leray-Schauder degree theory.
Lemma 5.1
Let \(\varepsilon >0\) be any fixed constant, assume \(d_{1},~d_{2}\geq \varepsilon \) and \(h\ne \frac{gr}{m}\). Then there exist two positive constants \(R:=R(\varepsilon )\) and \(\delta :=\delta (\varepsilon )\) such that any positive solution \({\mathbf{u}}\) of \(\mathbf{F}(\mathbf{u},d_{1})=0\) fulfills \({\mathbf{u}}\in \Sigma \) \(({\mathbf{u}}\notin \partial \Sigma )\), where the set \(\Sigma \) is defined by
with
Proof
For any fixed constant \(\varepsilon >0\), let \({\mathbf{u}}\) be the solution of (5.3) with \(d_{1},~d_{2}\geq \varepsilon \). Then Lemma 3.2 ensures that there admits a positive constant \(R:=R(\varepsilon )\) such that
Thus, we can introduce a bounded set \(U_{R}\) (see (5.5)) and any positive solution \({\mathbf{u}}\) of \(\mathbf{F}(\mathbf{u},d_{1})=0\) belongs to \(U_{R}\).
We next prove that there admits a constant \(\delta :=\delta (\varepsilon )>0\) such that the solution \(\mathbf{u}\) of (5.3) with \(d_{1},~d_{2}\geq \varepsilon \) satisfies \(\min _{\bar{\Omega}}u(x)>\delta \), \(\min _{\bar{\Omega}}w(x)>\delta \). Let \(x_{1}\in \bar{\Omega}\) be a minimum point of \(w\): \(w(x_{1})=\min _{\bar{\Omega}}w(x)\). We apply the maximum principle [23, Proposition 2.2] to the second equation of (1.2), and get
which combined with (3.1) gives
for all \(x\in \bar{\Omega}\).
Now, assume for contradiction that for any \(\delta >0\), we can find \(d_{1,\delta}\geq \varepsilon \) such that the corresponding positive solution \({\mathbf{u}}_{\delta}:=(u_{\delta},w_{\delta})^{\mathcal{T}}\) of \(\mathbf{F}(\mathbf{u},d_{1})=0\) satisfy \(0\leq \min _{\bar{\Omega}}u_{\delta}(x)\leq \delta \). Fixing \(d_{2}\geq \varepsilon \) for some fixed small \(\varepsilon >0\), we only need to consider the case when \(\varepsilon \leq d_{1,\delta}< D\) by Theorem 2.2. It follows from Lemma 3.2 that we can find a sequence \(\{\delta _{j}\}_{j=1}^{\infty}\) satisfying
such that \((u_{j},w_{j},d_{1,j}):=(u_{\delta _{j}},w_{\delta _{j}},d_{1,{ \delta _{j}}})\) fulfills that as \(j\rightarrow \infty \)
and
where functions \(0\leq u_{\infty}\), \(w_{\infty}\in C^{1}(\bar{\Omega})\) and the contant \(d_{1,\infty}\geq \varepsilon >0\). Then, we have
Applying the strong maximum principle to the first equation of (1.2), we obtain \(u_{\infty}\equiv 0\). Then the second equation of (1.2) implies
Integrating the above equation over \(\Omega \), one has
which, along with (3.1), gives \(w_{\infty}=\frac{h}{g}\).
One the other hand, we define \(\widetilde{u}_{j}:=\frac{u_{j}}{\|u_{j}\|_{L^{\infty}}}\). Then it satisfies that \(\|\widetilde{u}_{j}\|_{L^{\infty}}=1\) for any \(j\geq 1\) and
Lemma 3.2 shows that the \(W^{2,p}\)-bound of \(\widetilde{u}_{j}\) can be taken uniformly with respect to \(d_{1,j}\rightarrow d_{1,\infty}\), given that \(d_{1,j}\geq \varepsilon >0\). Therefore, by combining the Sobolev embedding theorem with the standard compactness argument for elliptic equations, we can find a non-negative function \(\widetilde{u}_{\infty}\in C^{1}(\bar{\Omega})\) with \(\|\widetilde{u}_{\infty}\|_{L^{\infty}}=1\) fulfilling (after passing to a further subsequence, if necessary)
and
as \(j\rightarrow \infty \). Applying the Harnack – type inequality (see, [21] or [30, Lemma 2.2]]) to (5.6), we know that \(\widetilde{u}_{\infty}>0\). This fact together with \(\int _{\Omega }\widetilde{u}_{\infty}(r-\frac{mh}{g})=0\) implies \(h=\frac{gr}{m}\), which contradicts the assumption \(h\ne \frac{gr}{m}\).
Consequently, for any fixed \(\varepsilon >0\) and \(d_{1},d_{2}\geq \varepsilon \), there admits some \(\delta _{2}:=\delta _{2}(\varepsilon )>0\) such that \(\min _{\bar{\Omega}}u>\delta _{2}\). Taking \(\delta :=\min \{\delta _{1},\delta _{2}\}\) in (5.4), we finish the proof of Lemma 5.1. □
Lemma 5.1 yields that the Leray-Schauder degree \(\operatorname{deg}(\mathbf{F}( \cdot ,d_{1}),\Sigma ,0)\) is well defined if \(h\ne \frac{gr}{m}\) because of \(\mathbf{F}(\cdot ,d_{1})\neq 0\) on \(\partial \Sigma \) (i.e., \(0\notin {\mathbf{F}}(\partial \Sigma ,d_{1})\)). The Leray-Schauder index formula indicates
where \(\gamma _{i}\) is the number of negative eigenvalues (counting the algebraic multiplying) of \(D_{\mathbf{u}}\mathbf{F}(\mathbf{u}_{i},d_{1})\).
Next, we compute the number \(\gamma _{i}\). A straightforward calculation gives
where the matrix
Thus, the linearized eigenvalue problem
can be rewritten as
For every \((\phi , \psi) \in Y\), they can be uniquely expressed as
with
Substituting (5.9) into (5.8) gives that for each \(k\geq 0\) and \(1\leq j\leq \operatorname{dim}E(\lambda _{k})\),
where
Consequently, (5.10) has a nontrivial solution \((c _{kj},b_{kj})\) iff
where \(J_{i}\) and \(K_{i}~(i=1,2,3)\) are defined in (2.6). Moreover, (5.12) has two roots
It follows from (5.11) that all eigenvalues of \(D_{\mathbf{u}}\mathbf{F}(\mathbf{u}_{i},d_{1})\) can be denoted by
with \(k\in \mathbb{N}\cup \{0\}\) and \(i=1,2,3\). Let \(\#\) – sign denote the cardinal number, then
Therefore, to compute \(\gamma _{i}~(i=1,2,3)\), we need to analyse the signs of \(J_{i}\) and \(K_{i}\) as well as the properties of \(X_{i}^{\pm}(d_{1})\).
Lemma 5.2
The following statements hold.
-
(1)
If \(0< h< \frac{gr}{m}\), then
$$ K_{i}=K_{2}=\frac{u_{2}}{d_{1}d_{2}}(g+bu_{2}-mbw_{2})>0; $$(5.15) -
(2)
If \(\frac{gr}{m} < h < \frac{(g+br)^{2}}{4bm}\) and \(r > \frac{g}{b}\), then
$$ K_{i}=\left \{ \begin{aligned} K_{1}< 0, \\ K_{2}>0; \end{aligned} \right . $$(5.16) -
(3)
If \(h=\frac{(g+br)^{2}}{4bm}\) and \(r > \frac{g}{b}\), then
$$ K_{i}=K_{3}=0. $$(5.17)
Proof
Case 1: \(0< h<\frac{gr}{m}\). In this case, (1.2) only has a unique constant positive solution \((u_{2},w_{2})\) and hence \(K_{i}=K_{2}\). We use \(r-u_{2}-mw_{2}=0\) and \(h-bu_{2}w_{2}-gw_{2}=0\) to update \(K_{2}\) as
which, along with \(0< h<\frac{gr}{m}\), gives \(K_{2}>0\).
Case 2: \(\frac{gr}{m}< h<\frac{(g+br)^{2}}{4bm}\) and \(r>\frac{g}{b}\). For this case, (1.2) has two constant positive solutions \((u_{1},w_{1})\) and \((u_{2},w_{2})\). Applying \(w_{i}=\frac{h}{bu_{i}+g}~(i=1,2)\), we rewrite \(K_{i}\) as
For \(i=1\), \(h<\frac{(g+br)^{2}}{4bm}\) implies
which substituted into (5.18) gives \(K_{1}<0\).
For \(i=2\), applying \(h<\frac{(g+br)^{2}}{4bm}\) again, one has
This shows \(K_{2}>0\).
Case 3: \(h=\frac{(g+br)^{2}}{4bmh}\) and \(r>\frac{g}{b}\). In this case, (1.2) only has a unique constant positive solution \((u_{3},w_{3})\). Using (2.1), (2.4) and \(h=\frac{(g+br)^{2}}{4bmh}\), one obtains \(K_{3}=0\) directly. We complete the proof of Lemma 5.2. □
Next, we shall prove the existence of non-constant positive solutions of (1.2) in three cases for \(h\).
5.1 The Case of \(0< h<\frac{gr}{m}\)
Lemma 5.3
For any fixed \(\varepsilon >0\), assume \(d_{1},~d_{2}\geq \varepsilon \). Then \(\operatorname{deg}(\mathbf{F}(\cdot , d_{1}), \Sigma , 0)=1\).
Proof
For \(d_{1},~d_{2}\geq \varepsilon \), let \(\mathbf{u}\) be the corresponding positive solution of \(\mathbf{F}(\mathbf{u},d_{1})=0\). Then it follows from Lemma 5.1 that \(\mathbf{F}(\mathbf{u},d_{1})\neq 0\) on \(\partial \Sigma \). By the homotopy invariance of the topological degree [1, Theorem 11.1], we obtain
By Table 1 and Theorem 2.2, we know that \(\mathbf{u}_{2}\) is the unique solution of \(\mathbf{F}(\mathbf{u}, d_{1})=0\) in \(\Sigma \) for \(d_{1}\geq D\), and hence the excision property [1, Corollary 11.2] gives
where \(\gamma _{2}\) is defined in (5.14).
On the other hand, (5.15) shows \(K_{2}>0\). By the definitions in (2.5) and (2.6), one can easily check that
for \(d_{1}\geq D\) is sufficiently large. Therefore, we have \(\gamma _{2}=0\). This implies
which together with (5.19) implies
Thus, the proof of Lemma 5.3 is finished. □
Proof of Theorem 2.3
Assume that there is no non-constant positive solution of (1.2), then \(\mathbf{u}_{2}\) is the unique solution of (1.2). Hence, the excision property [1, Corollary 11.2] yields
where the constant \(\varepsilon >0\) is any fixed.
Next, we shall calculate \(\gamma _{2}\). Based on (2.5), (2.6), (5.15) and the condition \(\chi >\frac{d_{2}}{bw_{2}}\), we can obtain a number
such that
and they satisfy
where \(q_{1}\) and \(q_{2}\) are positive constants and defined in (2.7). Moreover, one can check that \(X_{2}^{-}(d_{1})\) and \(X_{2}^{+}(d_{1})\) are monotone increasing and decreasing with respect to \(d_{1}\in (0, \ell _{1})\), respectively.
Denote
Since \(X_{2}^{-}(d_{1})\) is monotone increasing with respect to \(d_{1}\) on \((0, \ell _{1})\), let
Then the monotone increasing property of \(\lambda _{j}\) for \(j\in \mathbb{N}\) yields that the sequence \(\{D_{j}\}_{j=j_{0}}^{\infty}\) fullfills
If \(j_{0}>k_{0}\), define
Take \(0<\varepsilon <\widetilde{D}_{k_{0}}\), it follows from the monotonicity of \(X_{2}^{+}(d_{1})\) and \(\lambda _{k}\) that
Consequently, (5.14) implies
For the case of \(j_{0}=k_{0}\), one can check that
Let \(\widetilde{D}_{k_{0}-1}:=\varepsilon \). Hence, if \(d_{1}\in (D_{j+1},D_{j})\cap (\widetilde{D}_{k},\widetilde{D}_{k+1})\) and \(j+k+2\) is odd \(( j\geq j_{0}-1\geq k\geq k_{0}-1)\), then
This contradicts Lemma 5.3. Since \(\varepsilon >0\) is arbitrary, the proof of Theorem 2.3 is finished. □
5.2 The Case of \(\frac{gr}{m}< h<\frac{(g+br)^{2}}{4bm}\) with \(r>\frac{g}{b}\)
In this case, (1.2) has two constant positive solutions: \(\mathbf{u}_{1}\) and \(\mathbf{u}_{2}\).
Lemma 5.4
For any fixed \(\varepsilon >0\), assume \(d_{1},~d_{2}\geq \varepsilon \). Then \(\operatorname{deg}(\mathbf{F}(\cdot , d_{1}), \Sigma , 0)=0\).
Proof
We use the same manner as the proof of Lemma 5.3 to obtain
On the other hand, Table 1 and Theorem 2.2 show that \(\mathbf{F}(\mathbf{u}, d_{1})=0\) only has two constant positive solutions \(\mathbf{u}_{1}\), \(\mathbf{u}_{2}\) in set \(\Sigma \) for \(d_{1}\geq D\). Then the excision property [1, Corollary 11.2] indicates that for \(d_{1}\geq D\)
where \(\gamma _{i}~(i=1,2)\) are defined in (5.14).
For \(i=1\), (5.16) implies \(K_{1}<0\). One can verify that
Hence, we can find a contant \(d_{*}>0\) such that \(X_{1}^{+}(d_{1}) > 0 \text{ and } 0 >X_{1}^{-}(d_{1}) >-\lambda _{1}\) for all \(d_{1}\geq d_{*}\geq D\). This, along with the fact \(0=\lambda _{0}<\lambda _{1}<\lambda _{2}<\cdots \), gives
For \(i=2\), it follows from (5.16) that \(K_{2}>0\). Proceeding a similar procedure as the proof of Lemma 5.3, one obtains \(\gamma _{2}=0\). This together with (5.23), (5.24) and (5.25) yields that
for \(d_{1}\geq \varepsilon \). The proof of Lemma 5.4 is finished. □
Proof of Theorem 2.4 under condition (c1)
Assume that (1.2) has no non-constant positive solution. Then (1.2) has only two positive solutions: \(\mathbf{u}_{1}\) and \(\mathbf{u}_{2}\). Hence the excision property [1, Corollary 11.2] and the Leray-Schauder index formula [27, Theorem 2.8.1] yield that
for \(d_{1}\geq \varepsilon \), where the constant \(\varepsilon >0\) is any fixed. We next compute \(\gamma _{1}\) and \(\gamma _{2}\).
Since \(\chi > \frac{d_{2}}{bw_{2}} (>\frac{d_{2}}{bw_{1}})\), a direct calculation shows that \(X_{1}^{-}(d_{1})\) is monotone increasing about \(d_{1}\in (0, \infty )\) and
as well as
Define
Then, (5.27), (5.28) and the monotonicity of \(X_{1}^{-}(d_{1})\) and \(\lambda _{k}\) enable us to get a sequence \(\{E_{i}\}_{i=1}^{\infty}\) defined by (5.29), such that
By (5.14), we get
On the other hand, using the same manner as the proof of Theorem 2.3, one has
Hence, let \(k_{0}-1\leq k\leq j_{0}-1\leq j\) and denote \(\widetilde{D}_{k_{0}-1}:=\varepsilon \). Then if \(\chi >\frac{d_{2}}{bw_{2}}\) and
as well as \(i+j+k+2\) is odd, (5.26), (5.30) and (5.31) yield
which contradicts Lemma 5.4. Since the constant \(\varepsilon >0\) is any fixed, the contradiction argument enables us to obtain Theorem 2.4 under condition (c1). □
5.3 The Case of \(h=\frac{(g+br)^{2}}{4bm}\) with \(r>\frac{g}{b}\)
In this case, \(\mathbf{u}_{3}\) is the unique constant positive solution of (1.2).
Lemma 5.5
For any fixed \(\varepsilon > 0\), assume \(d_{1},~d_{2}\geq \varepsilon \). Then \(\operatorname{deg}(\mathbf{F}(\cdot , d_{1}), \Sigma , 0)=1\).
Proof
Proceeding the same manner as the proof of Lemma 5.3 and Lemma 5.4, we obtain \(\text{deg }(\mathbf{F}(\cdot , d_{1}), \Sigma , 0)=(-1)^{\gamma _{3}}=(-1)^{0}=1\) readily. □
Proof of Theorem 2.4 under condition (c2)
Assume that there is no non-constant positive solution of (1.2), then \(\mathbf{u}_{3}\) is the unique positive solution of (1.2). Hence, the excision property [1, Corollary 11.2] yields
where the constant \(\varepsilon >0\) is any fixed.
Since \(h=\frac{(g+br)^{2}}{4bm}\) and \(r>\frac{g}{b}\), it follows from (5.17) that \(K_{3}=0\). Then the fact \(\chi >\frac{d_{2}}{bw_{2}}=\frac{d_{2}}{bw_{3}}\) enables us to find a positive constant
such that
and
Denote
Since \(X_{3}^{-}(d_{1})\) is monotone increasing with respect to \(d_{1}\in (0,\ell _{2})\), the sequence \(\{\widetilde{E}_{n}\}_{n=1}^{\infty}\) fulfills
which combined with the definition of \(\gamma _{3}\) in (5.14) and (5.32) implies that
when \(d_{1}\in (\widetilde{E}_{n+1}, \widetilde{E}_{n})\) and \(n+1~(n\geq 0)\) is odd. Therefore, (5.35) is contradicted with Lemma 5.5. Then the proof of Theorem 2.4 under condition (c2) is finished. □
6 Numerical Simulations for Spatial Patterns
This section aims to numerically verify the theoretical results, and show the distribution of populations (patterns generated by (1.1)) in one-dimensional space. In all simulations, we set
which gives
We begin by considering the case of \(0< h< h_{1}\). Taking \(h=0.08< h_{1}\) and \(d_{2}=2\), one obtains \((u_{2},w_{2})=(0.653113,0.346887)\). As shown in Fig. 2, we do obtain the stationary spatial patterns in the domain \(\Omega =(0,20)\). Moreover, the simulation in Fig. 2 is consistent with the result shown in Theorem 2.3. In fact, by the parameter values chosen in Fig. 2 and (6.1), one has \(\chi =60>\frac{ad_{2}}{bw_{2}}=28.8278\), \(q_{1}=0.0745592\), \(q_{2}=0.193541\), \(\ell _{1}=0.160555\). It follows from \(\lambda _{1}=\frac{1^{2}\pi ^{2}}{400}=0.024674\), \(\lambda _{2}= \frac{2^{2}\pi ^{2}}{400}=0.098696\), \(\lambda _{3}= \frac{3^{2}\pi ^{2}}{400}=0.222066\), \(\lambda _{4}= \frac{4^{2}\pi ^{2}}{400}=0.394784\), \(\lambda _{16}= \frac{16^{2}\pi ^{2}}{400}=6.31655\), \(\lambda _{17}= \frac{17^{2}\pi ^{2}}{400}=7.13079\) and (5.21) that \(j_{0}=3\), \(k_{0}=2\). According to the definitions of \(D_{j}\) and \(\widetilde{D}_{k}\), it is easy to verify that \(j=16\) satisfies that \(d_{1}=0.1 \in (D_{17},D_{16})\cap (0,\widetilde{D}_{2})\cap (0,\ell _{1})\) and \(j+k_{0}+1=19\) is odd. Hence, the conditions in Theorem 2.3 are fulfilled and there admits a non-constant steady state solution as given in Fig. 2.

Next, we explore the numerical spatial patterns in the case of \(h_{1}< h\leq h_{2}\). We take \(h_{1}< h=0.11< h_{2}\), \(d_{2}=1\) and get \((u_{1},w_{1})=(0.138197,0.861803)\), \((u_{2},w_{2})=(0.361803,0.638197)\). As shown in Fig. 3, (1.1) does induce stationary spatial patterns in one-dimensional space \(\Omega =(0,15)\). Moreover, the simulation in Fig. 3 is also consistent with the result shown in Theorem 2.4. Indeed, by the parameter values chosen in Fig. 3 and (6.1), one has \(\chi =10>\frac{ad_{2}}{bw_{2}}=7.83458\), \(q_{1}=0.161803\), \(q_{2}=0.176748\), \(\ell _{1}=0.104056\). Then the facts \(\lambda _{1}=\frac{1^{2}\pi ^{2}}{225}=0.0438649\), \(\lambda _{2}= \frac{2^{2}\pi ^{2}}{225}=0.17546\), \(\lambda _{3}= \frac{3^{2}\pi ^{2}}{225}=0.394784\), \(\lambda _{4}= \frac{4^{2}\pi ^{2}}{225}=0.701839\), \(\lambda _{5}= \frac{5^{2}\pi ^{2}}{225}=1.09662\) along with (5.21) gives \(j_{0}=3\), \(k_{0}=2\). Moreover, by the definitions of \(D_{j}\), \(\widetilde{D}_{k}\) and \(E_{i}\) \((i\geq 0, j\geq j_{0}-1\geq k\geq k_{0}-1)\), we can choose \(i=4\), \(j=3\), \(k=2\) such that \(d_{1}=0.1\in (E_{5},E_{4})\cap (D_{4},D_{3})\cap (\widetilde{D}_{2}, \ell _{1})\) and \(i+j+k+2=11\) is odd. Thus, these conditions in Theorem 2.4 are satisfied and there admits a non-constant steady state solution as given in Fig. 3.

Pattern formation generated by (1.1) with \(d_{2}=1\), \(h_{1}< h=0.11< h_{2}\) and \(\chi =10\) in \(\Omega =(0,15)\). Other parameter values are given by (6.1); The initial datum \((u_{0},w_{0})\) is set as a small random perturbation of the homogeneous coexistence steady state \((0.361803, 0.638197)\)
Data Availability
Not applicable.
References
Amann, H.: Fixed point equations and nonlinear eigenvalue problems in ordered Banach spaces. SIAM Rev. 18(4), 620–709 (1976)
Casal, A., Eilbeck, J.C., López-Gómez, J.: Existence and uniqueness of coexistence states for a predator-prey model with diffusion. Differ. Integral Equ. 7(2), 411–439 (1994)
Chen, X.F., Qi, Y.W., Wang, M.X.: Steady states of a strongly coupled prey-predator model. Discrete Contin. Dyn. Syst. 2005(suppl.), 173–180 (2005)
Dancer, E.N.: A counterexample on competing species equations. Differ. Integral Equ. 9(2), 239–246 (1996)
Delgado, M., López-Gómez, J., Suárez, A.: On the symbiotic Lotka-Volterra model with diffusion and transport effects. J. Differ. Equ. 160(1), 175–262 (2000)
Deng, X.M., Huang, Q.H., Wang, Z.-A.: Global dynamics and pattern formation in a diffusive population-toxicant model with negative toxicant-taxis. SIAM J. Appl. Math. 83(6), 2212–2236 (2023)
Du, Y.H., Lou, Y.: Some uniqueness and exact multiplicity results for a predator-prey model. Trans. Am. Math. Soc. 349(6), 2443–2475 (1997)
Du, Y.H., Lou, Y.: Qualitative behaviour of positive solutions of a predator-prey model: effects of saturation. Proc. R. Soc. Edinb., Sect. A 131(2), 321–349 (2001)
Erickson, R.A., Cox, S.B., Oates, J.L., Anderson, T.A., Salice, C.J., Long, K.R.: A daphnia population model that considers pesticide exposure and demographic stochasticity. Ecol. Model. 275, 37–47 (2014)
Ermentrout, B.: Stripes or spots? Nonlinear effects in bifurcation of reaction-diffusion equations on the square. Proc. R. Soc. Lond. A 434(1891), 413–417 (1991)
Gilbarg, D., Trudinger, N.S.: Elliptic Partial Differential Equations of Second Order, 2nd edn. Springer, Berlin (1983)
Hallam, T.G., DeLuna, J.T.: Effects of toxicants on populations: a qualitative approach III. Environmental and food chain pathways. J. Theor. Biol. 109, 411–429 (1984)
Hallam, T.G., Clark, C.E., Jordan, G.S.: Effects of toxicants on populations: a qualitative approach II. First order kinetics. J. Math. Biol. 18, 25–37 (1983)
Hallam, T.G., Clark, C.E., Lassiter, R.R.: Effects of toxicants on populations: a qualitative approach I. equilibrium environmental exposure. Ecol. Model. 18, 291–304 (1983)
Hayashi, T.I., Kamo, M., Tanaka, Y.: Population-level ecological effect assessment: estimating the effect of toxic chemicals on density-dependent populations. Ecol. Res. 24, 945–954 (2009)
Huang, Q.H., Wang, H., Lewis, M.A.: The impact of environmental toxins on predator-prey dynamics. J. Theor. Biol. 378, 12–30 (2015)
Huang, Q.H., Seo, G., Shan, C.: Bifurcation and global dynamics in a toxin-dependent aquatic population model. Math. Biosci. 296, 26–35 (2018)
Kan-on, Y.: Existence and instability of Neumann layer solutions for a 3-component Lotka-Volterra model with diffusion. J. Math. Anal. Appl. 243(2), 357–372 (2000)
Kan-on, Y., Mimura, M.: Singular perturbation approach to a 3-component reaction-diffusion system arising in population dynamics. SIAM J. Math. Anal. 29(6), 1519–1536 (1998)
Kuto, K., Tsujikawa, T.: Limiting structure of steady-states to the Lotka-Volterra competition model with large diffusion and advection. J. Differ. Equ. 258(5), 1801–1858 (2015)
Lieberman, G.M.: Bounds for the steady-state Sel’kov model for arbitrary \(p\) in any number of dimensions. SIAM J. Math. Anal. 36(5), 1400–1406 (2005)
López-Gómez, J., Pardo San Gil, R.: Coexistence in a simple food chain with diffusion. J. Math. Biol. 30(7), 655–668 (1992)
Lou, Y., Ni, W.-M.: Diffusion, self-diffusion and cross-diffusion. J. Differ. Equ. 131(1), 79–131 (1996)
Lou, Y., Ni, W.-M.: Diffusion vs cross-diffusion: an elliptic approach. J. Differ. Equ. 154(1), 157–190 (1999)
Lou, Y., Martínez, S., Ni, W.-M.: On \(3\times 3\) Lotka-Volterra competition systems with cross-diffusion. Discrete Contin. Dyn. Syst. 6(1), 175–190 (2000)
Ma, Z., Cui, G., Wang, W.: Persistence and extinction of a population in a polluted environment. Math. Biosci. 101, 75–97 (1990)
Nirenberg, L.: Topics in Nonlinear Functional Analysis. Courant Lecture Notes, vol. 6. Am. Math. Soc., Providence (2001)
Pang, P.Y.H., Wang, M.X.: Qualitative analysis of a ratio-dependent predator-prey system with diffusion. Proc. R. Soc. Edinb., Sect. A 133(4), 919–942 (2003)
Pang, P.Y.H., Wang, M.X.: Non-constant positive steady states of a predator-prey system with non-monotonic functional response and diffusion. Proc. Lond. Math. Soc. (3) 88(1), 135–157 (2004)
Peng, R., Shi, J.P., Wang, M.X.: On stationary patterns of a reaction-diffusion model with autocatalysis and saturation law. Nonlinearity 21(7), 1471 (2008)
Protter, M.H., Weinberger, H.F.: Maximum Principles in Differential Equations. Springer, New York (1984)
Spromberg, J.A., Birge, W.J.: Modeling the effects of chronic toxicity on fish populations: the influence of life-history strategies. Environ. Toxicol. Chem. 24, 1532–1540 (2005)
Spromberg, J.A., Meador, J.P.: Relating chronic toxicity responses to population-level effects: a comparison of population-level parameters for three salmon species as a function of low-level toxicity. Ecol. Model. 199(3), 240–252 (2006)
Thomas, D.M., Snell, T.W., Jaffar, S.M.: A control problem in a polluted environment. Math. Biosci. 133, 139–163 (1996)
Wang, Q.: Dynamics of a spatiotemporal model on populations in a polluted river. Nonlinear Anal., Real World Appl. 71, 103803 (2023)
Wang, H.-Y., Guo, S.J., Li, S.Z.: Stationary solutions of advective Lotka-Volterra models with a weak Allee effect and large diffusion. Nonlinear Anal., Real World Appl. 56, 103171 (2020)
Wolfe, B.W., Lowe, C.G.: Movement patterns, habitat use and site fidelity of the white croaker (Genyonemus lineatus) in the Palos Verdes Superfund Site, Los Angeles, California. Mar. Environ. Res. 109, 69–80 (2015)
Yu, Y., Ling, Z., Zhou, Y.: Dynamical behavior of a spatiotemporal model in open advective environments. Acta Appl. Math. 187, 1 (2023)
Zhou, P., Huang, Q.H.: A spatiotemporal model for the effects of toxicants on populations in a polluted river. SIAM J. Appl. Math. 82(1), 95–118 (2022)
Acknowledgements
The author is very grateful to Professor Zhi-An Wang (The Hong Kong Polytechnic University) for his meticulous reading of this manuscript and insightful comments.
Funding
Open access funding provided by The Hong Kong Polytechnic University.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
The author declares that she has no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Chu, J. Steady States of a Diffusive Population-Toxicant Model with Negative Toxicant-Taxis. Acta Appl Math 190, 13 (2024). https://doi.org/10.1007/s10440-024-00646-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10440-024-00646-1