
Abstract
Immersive media technologies, such as virtual and augmented reality, have recently enabled a more holistic way to comprehend natural hazards. In this work, we aim at visualizing the temporal and spatial evolution of a debris flow in a virtual reality environment. We develop a framework to integrate the output results obtained from a debris flow numerical model into virtual reality. To guide the framework, a real debris flow event, which happened in Hunnedalen (Norway) in 2016 and blocked a road network, is considered as a case study. The debris flow is back-calculated using a depth-averaged numerical model and the simulation results are imported into a dedicated game engine to construct a digital model of the debris flow event. The debris flow is visualized using a Head-Mounted Display. We therefore discuss a wide range of potential applications of virtual reality to manage and grasp landslide phenomena: training for rescue operations; improving decision-making; studying early warning systems, and educating communities affected by natural hazards. We finally provide a quantitative evaluation of the hazard perception for a road user. We show that the debris flow movement is perceived at variable delayed times from the triggering of the landslide, depending on the position along the road where the debris flow is observed. Evaluating the realistic perception time of the natural hazard may be fundamental to designing more effective road networks, signs, and mitigation measures.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Societal safety can be defined as the society’s ability to maintain critical social functions, protect the life and health of the citizens, and meet citizens’ basic requirements in a variety of stressful situations. Natural disasters such as landslides and flash floods are among the various stresses threatening the safety of society. The extent of the expected changes and potential negative impacts of natural disasters on society have been examined closely by Intergovernmental Panel on Climate Change (IPCC) in 2021. The situation is foreseen to worsen in the coming years as the drivers of such events (e.g., rainfall, temperature extremes) are dynamic and escalating due to climate change, land use, urbanization, and infrastructure development. For example, climate projections for Norway indicate an increase in temperature and precipitation, respectively, of 4.5° and 18% by the end of the century (Hanssen-Bauer et al. 2017). This will significantly increase the frequency of triggering events for debris flow landslides such as extreme events of rainfall, snowmelt, and temperature changes. Debris flows are a type of landslide traveling at high velocities and for long distances in mountainous and torrential channels. Due to the large flow volumes and velocities, they can lead to severe social and economic losses, and sometimes result in causalities. For instance, from 1995 to 2014, 1370 deaths and 784 injuries were recorded in 27 European countries from 476 landslide events most of which were rock falls and debris flow (Haque et al. 2016). Meyer et al. (2015) estimated that road closures by debris flows in western Norway could cause up to 10,000 vehicle kilometers per year traffic detours. It is therefore evident that novel methods are needed to study and deal with debris flow hazard and communicate the risk to the affected communities.
Runout modeling has prime importance to identify elements at risk during quantitative risk analysis of a debris flow susceptible area. Runout analysis of debris flows can be carried out using empirical or numerical models. Since debris flows are complex, large-scale, and difficult to model under controlled conditions, numerical modeling is an ideal tool in obtaining realistic results. Advanced numerical simulation in depth-averaged and three-dimensional (3D) spaces are often done using material point method, finite volume method, finite difference method, and smoothed particle hydrodynamics approaches to estimate flow run-out and damage potential of debris flow hazards (e.g., Savage and Hutter 1989; McDougall 2006; Christen et al. 2010; Kwan et al. 2019; Tayyebi et al. 2021). The results from these numerical models are essential for producing debris flow hazard maps that show the inundation area, runout, flow depth, and flow velocity on 2D maps. However, simple 2D maps have a limited capacity to support and communicate both the spatial and temporal evolution of the debris flow. In addition, maps are primarily expert tools, and their contents may not be suitably understandable to non-experts, such as the population affected by the risk, decision-makers, and politicians. This creates a communication gap in the risk management process of debris flow disasters. Hence, a better understanding and perception of the debris flow simulation results by a layperson would favor the awareness of the debris flow risk and provide useful feedbacks to improve the design of mitigation solutions.
Immersive visualization technologies such as Virtual Reality (VR) and Augmented Reality (AR) offer new opportunities to communicate natural hazards to general experts and the public by providing a fully immersive and interactive experience. VR enables the user to interact with a computer-generated 3D environment that simulates reality using immersive technologies (e.g., Head-Mounted Displays (HMDs)). The VR environment can be created by software platforms such as game engines like Unity (Haas 2014) or Unreal (Sanders 2016) and visualized via hardware such as HMDs. These VR-simulated environments allow the users to be immersed and better perceive the 3D world. However, the integration of landslide numerical simulations into VR is still challenging due to the limited ability of VR to cope with georeferenced spatial data.
Some attempts have been made to introduce VR to visualize natural hazards. Ondercin (2016) explored the possibility of simulating rock falls within the VR environment in Unity by using built-in physics which takes gravity, collision and other forces into account. Irshad et al. (2021) performed a simulation of quick clay flow in Blender software (Brito 2018) using simple built-in physics and exported the results into Unity for VR implementation. However, the simulation was too simple to account for the complex nature of the dynamics of quick clay flow. Havenith (2021) introduced a 2D rockfall simulation into a 3D terrain to be visualized in VR.
This work aims at combining the results of numerical simulations of debris flows with realistic visualization in VR. A large debris flow event that happened in Hunnedalen (Norway) in 2016 is considered as a case study. This debris flow was particularly considerable in Norway as, due to the large entrainment volume, it could reach an important coastal road located at the base of the channel. A depth-averaged numerical model of debris flows (RAMMS, Christen et al. 2010) is applied to back-calculate the debris flow event. A framework is then defined to visualize the numerical simulation in a VR environment. The potential applications of VR for the visualization of debris flows and landslides are, therefore, discussed.
Methods
Overview of the visualization framework
The proposed method for debris flow visualization in VR is based on four steps (Fig. 1): data preparation, numerical simulation, 3D visualization, and VR implementation. The data preparation includes the fieldwork to collect reliable data on the debris flow event, the creation of a digital terrain model (DTM) for the topography, identification of the debris flow initiation area (release area), and the determination of the rheological parameters. The DTM is typically provided as an ESRI ASCII raster format (.asc) which gives elevation of the topography on a regular two-dimensional grid. The initiation area, also called release area, is described by a polygonal Geographic Information System (GIS) shapefile and a corresponding initial flow height. Both the area of the polygon and the initial flow height determine the initial mobilized soil mass.

Overview of the proposed method and tool chain. The tool chain consists of RAMMS as a debris flow simulation application and Unity as a virtual environment design platform. The input parameters for the python script are provided inside the script itself. As C# is an integral part of Unity, the script is used inside the Unity platform
These data are input parameters into numerical software, which simulates the flow behavior in time. The simulation results are provided in terms of flow height and velocity, which can be visualized with the interface from the software. In most debris flow analyses, the flow height and velocity are animated to show the temporal and spatial variations to evaluate the accuracy of input parameters and the debris flow event in general. In this work, they are further exported as ESRI ASCII raster format (.asc) files, which are used as input for the VR visualization. For each visualization time step, set by a user in the simulation software, a flow height and velocity are exported to be used as input for the VR visualization. Figure 1 shows the overview of the tools used in this work. Rapid Mass Movement Simulation (RAMMS) and Unity were used as debris flow numerical simulation tool and virtual environment design platform, respectively. However, any finite volume method debris flow simulation method can also be used as far as the output results are provided as flow height and flow velocity. In the next sections, the numerical model for debris flow simulation and the VR visualization are described.
Overview of the numerical model RAMMS
In this work, the RAMMS debris flow model (Christen et al. 2010) is used to numerically compute the debris flow dynamics. RAMMS is based on depth-averaged equations to calculate the dynamics of a frictional-turbulent flow on a three-dimensional topography. The RAMMS software is among the most used in engineering practice, as it allows to calculate the runout of a debris flow, with a reduced computation time compared to three-dimensional numerical models.
The model is based on a one-phase equivalent incompressible fluid with constant density. The mass and momentum balance equations are solved in time (t) on a 3D topography z(x, y) for the variables flow height H(x,y) and depth-averaged flow velocity \({\varvec{U}}(x,y)={\left({U}_{\mathrm{x}}, {U}_{\mathrm{y}}\right)}^{T}\).
The mass balance equation is expressed as:
where \(\frac{dz}{dt}\) is the entrainment rate. The momentum conservation in the x and y directions is expressed as:
where \({(g}_{\mathrm{x}},{g}_{\mathrm{y}})\) are the surface tangential components of gravitational acceleration, \({g}_{\mathrm{z}}\) is the surface normal component of gravitational acceleration. \({\varvec{S}}={\left({S}_{\mathrm{x}}, {S}_{\mathrm{y}}\right)}^{T}\) is the frictional resistance, which is implemented according to the Voellmy rheology:
where ρ is the bulk density of the flow, μ is the Coulomb apparent friction coefficient and ξ is the turbulence coefficient. Mass and momentum balance equations are solved in an Eulerian reference system by the finite volume method. The stopping calculation criterion is based on the percentage of maximum flow momentum (Bartelt et al. 2017).
An empirical entrainment model (Frank et al. 2015) is used in RAMMS to determine the entrainment rate, which is based on field data from the Illgraben channel in Switzerland (Berger et al. 2011). The maximum erosion depth (em), which can be reached in a certain cell of the DTM, is calculated as:
where τ is the slope-parallel gravitational stress, τc is a critical shear stress and dz/dτ is a proportionality factor. The entrainment rate is specified by a constant parameter dz/dt in Eq. (1) and is active when Eq. (5) is valid and until the erosion depth has reached the maximum value according to Eq. (5) (Frank et al., 2015).
The parameters of the entrainment model (dz/dτ, dz/dt, τc) are specified in RAMMS before each simulation, together with the values of the Voellmy parameters (\(\mu\) and ξ). The calibration of these parameters for the Hunnedalen debris flow will be detailed in the Results section of the paper.
Output results in RAMMS are written into a binary file at user-specified time intervals. The binary file is then automatically loaded into a built-in graphical user interface (GUI) in RAMMS, which shows the output results superimposed to the DTM. These results can be visualized dynamically over time and will be discussed later.
Virtual reality implementation in Unity
Unity software (Haas 2014) was used to develop the 3D VR environment, which is a digital model of the real environment. The virtual environment in Unity includes a scene and the terrain, debris flow, and other features can be introduced into the scene as 3D model objects. Four steps were followed to create the overall VR visualization of the debris flow event: (i) 3D scene construction and importing the terrain, debris flow, and other terrain features, (ii) Visual quality improvement, (iii) animation, and (iv) implementation of VR. A custom script based on Unity C# (C-sharp) was used to partially automate these steps.
The flow height and flow velocity exported from RAMMS as ESRI ASCII grid files at each visualization time interval are modified using a Python script. The flow height values at each grid of the raster are added to the corresponding elevation values of the DTM yielding flow surface elevation. Therefore, two types of DTMs were obtained: the original DTM to be used as base terrain and a series of DTMs (at each visualization time) representing flow surface elevations. Furthermore, we decomposed the flow velocity into x and y cartesian coordinates. The grid data (both the natural terrain and the simulated flow surface elevations and velocities) were imported into the Unity scene as 3D meshed objects.
To improve the visual quality of the basic scene, each object in the scene needs a material to be assigned. In addition, camera and lights should be added to the scene. The materials use shaders and hold textures, colors, and property values, which control the texture property and color types. The shaders use mesh data from the 3D objects, colors, and textures from the materials to generate an image as output to be used in a visual rendering. A universal render pipeline (URP) (Unity Technologies 2020), which is a prebuilt scriptable render pipeline made by Unity, is adopted to facilitate the rendering process of the scene. Two shaders were used: one for the natural terrain, the other for flow surface elevations. The shader for the natural terrain is a Unity built-in terrain tool which enables a user to paint the terrain with a predefined texture. To obtain the realism of the terrain, a grass texture for the flat part and rock texture for the part of the terrain with steep slope. The shader for the flow surface elevation is made in a way that the debris flow surface behaves like a flowing fluid. This has been done by animating the UV coordinates used for texturing. UVs are 2D coordinates that are used by Unity and other 3D applications to map a texture to a model. In the 3D flow surface elevation objects imported into Unity, each vertex stores its coordinate, normal vector, and the flow velocity vector. The UV coordinates for each vertex is computed by projecting its space coordinates vertically on the horizontal plane. The shader combines a surface texture which gives the flow muddy appearance and normal map also called bump map which controls the vertical deformation of the flow. To imitate the dynamics of the debris flow, this shader incorporates the flow velocities obtained from the numerical simulation to control the direction and speed of the flow.
The entire dynamic nature of the debris flow was represented by the animation of the series of the flow surface elevation. The flow surface elevations, stored as frames by the custom script, were made to appear on the screen consecutively based on the visualization time step provided in RAMMS and superimposed on the natural terrain. At this stage, a user can view the dynamic simulation of the debris flow in Unity.
The final step was the implementation of VR. Figure 2 shows the hardware setup of the virtual reality visualization. The virtual environment was created using Unity (version 2021.3.2). XR integration toolkit (Unity Technologies 2021a) was added into Unity to enable users to interact with virtual environment. The resulting virtual environment has been configured to be used through Oculus Quest 2 HMD (resolution: 1832 × 1920 per eye; refresh rate: 90 Hz; Field of view: 100°; integrated speakers and microphone) using Oculus XR plugin (Unity Technologies 2021b).

The VR setup. a Unity gaming engine along with the required plugins, b computer with the required graphics card and processing capacity. A computer is required for creating the VR environment, which depends on Unity’s system requirement (Unity Technologies 2021c) and deploying the VR scene to the HMD, c HMD with hand controllers and d a user experiencing VR. The HMD, in this case Oculus Quest 2, is connected with a computer which fulfills the HMD’s requirements (Meta Platforms Inc. 2021)
We employed a laptop with an NVIDIA GeForce GTX 1070 graphics card and an Intel Core i7-8750H CPU @2.20GHZ, 16 GB RAM six-core processor connected with Oculus Quest 2 HMD. Once the setup was completed, the VR scene was deployed on the HMD to visualize the debris flow.
Results
Description of the Hunnedalen debris flow event in 2016
The Mjåland catchment is located in the Hunnedalen valley, in Rogaland County (Norway) (Fig. 3). The channel extends from 720 to 300 m above sea level (a.s.l.), covering a planimetric longitudinal distance of approximately 750 m. On June 2nd, 2016, after a period of intense rainfall, a landslide was triggered by mobilization of vegetated soft soil and talus cover, between 720 and 655 m a.s.l. This initial mass successively flowed down along the slope confined by the channel and entrained the moraine bed soil. Finally, the debris flow deposited between 325 and 300 m a.s.l., covering the road for 150 m in extent and reaching, on the extreme right bank, the river.

Case study area, Hunnedalen: a location; b photo of the 2016 debris flow event; c orthophoto of the landslide area with indicated the release, erosion, and deposition areas
Field observations carried out after the event (in June 2016, by Multiconsult) and successively (June 2019, by the authors) allowed to estimate the initial, eroded, and deposited volumes (nomenclature is shown in Fig. 3). The release area consisted of two main parts: “Release 1” with an estimated depth of 0.5 m and “Release 2” with an estimated depth of 1.5 m. Erosion happened in two sections of the channel: “Erosion 1”, with an estimated average erosion depth of 1 m (this soil layer was completely eroded down to the bedrock level, which is now outcropping), and “Erosion 2” with an estimated average erosion depth of 1.2 m. The channel section between them was not eroded during the event. Finally, the debris flow deposited in the zone is indicated as “Deposition area”, with an average thickness of 2 m.
Back-calculation of the debris flow event using RAMMS
To illustrate the VR visualization of a debris flow, we use the numerical simulations of the Hunnedalen debris flow. The debris flow event was back-calculated by Vicari et al. (2021) using RAMMS. In this section, we will summarize the results of this back-calculation and provide additional details on the significance of the numerical parameters.
The simulation in RAMMS was performed using the pre-event digital terrain model, with a resolution of 2 m. The release volume corresponds to 2129 m3. A block release method was used, by subtracting the release depth to the initial DTM. The Voellmy rheology was used in RAMMS. The range of values investigated to simulate the Hunnedalen debris flow event is between 0.01 and 0.4 for the friction coefficient and between 100 and 400 m/s2 for the turbulence coefficient.
The erosion parameters in RAMMS were set equal to the default values: τc = 1 kPa; dz/dτ = 0.1 m/kPa and dz/dt = 0.025 m/s. Instead, to alter the total entrained volume and make it converge to the estimated one in the field (17,000 m3), we performed a sensitivity study on the Voellmy parameters, which were observed to influence the erosion process. Furthermore, in the zone “Erosion 1”, the maximum erodible depth was set to 1 m, to account for the known presence of the bedrock, which constitutes a boundary limit to the erosion process. Finally, for all the simulations, we fixed the stop parameter to be equal to 10% of the maximum total flow momentum.
The back-calculation aimed at replicating the available data observed in the field: depositional shape and total eroded volume. Figure 4 shows the dependency of the total eroded volume on the Voellmy rheological parameters. An increasing erosion volume was obtained for increasing values of the friction coefficient μ and decreasing values of the turbulence coefficient ξ. Indeed, for increasing values of μ, the flow became thicker, which increased the slope-parallel shear stress and therefore the maximum erosion depth in Eq. (5). Decreasing values of ξ and increasing values of μ were also seen to decrease the flow velocity, which increases the duration of the flow at any given location and therefore the total erosion depth, which is proportional to the flow duration through the parameter dz/dt.

Total entrainment volume computed with RAMMS, with different values of Voellmy’s rheological parameters
Among all the pairs of parameters tested, three pairs are able to simulate the observed erosion volume (16,778 m3): μ = 0.01, ξ = 100 m/s2; μ = 0.17, ξ = 150 m/s2; μ = 0.32, ξ = 400 m/s2. However, each of these combinations produces different final deposition shapes, as shown in Fig. 5. The runout distance is seen to be inversely proportional to the friction coefficient. The turbulence coefficient, vice versa, is seen to have a lower influence on the deposition process, as also discussed by Bartelt et al. (2017). Therefore, the selection of the best-fit parameters can be based on the similarity of the depositional shape to the observed one. Considering the available data, the best-fit parameters are selected as: μ = 0.17 and ξ = 150 m/s2.

Observed and simulated deposition shapes for different values of Voellmy’s rheological parameters: a μ = 0.01, ξ = 100 m/s2; b μ = 0.17, ξ = 150 m/s2; c μ = 0.32, ξ = 400 m/s.2
It is possible to observe that all the simulated deposition shapes are wider than the measured one. Three factors may have contributed to this difference. (i) RAMMS is a one-phase continuum model which does not consider the formation of coarser flow front and lateral levees (Iverson 1997), which are characterized by higher frictional resistance than the flow body and promote the lateral confinement of the flow (Johnson et al. 2012). Instead, the stopping criterion in RAMMS is based on a threshold on the maximum momentum, which creates some lateral expansion of the flow deposit by numerical diffusion. (ii) A constant earth pressure coefficient equal to 1 is used in RAMMS. Gray et al. (1999) showed that the selection of active/passive earth pressure coefficient changing based on the divergent/convergent deformation rate of the flow may improve the deposit shape. However, this option is not available in RAMMS. (iii) The effect of the forest is not considered in RAMMS, which might be especially important to confine the flow at low velocities, such as during the deposition process. Since our work is primarily oriented at providing a reasonable back-calculation of the Hunnedalen debris flow to be visualized in virtual reality, we will not further address these limitations of the model.
Visualization of the Hunnedalen debris flow in virtual reality
The numerical simulation with the parameters μ = 0.17 and ξ = 150 m/s2 is considered for the visualization. Figure 6a shows the final height of the debris flow (deposit) in the GUI of RAMMS. Figure 6b shows the digital model of the Hunnedalen valley, which is created from a 2 m resolution DTM of Hunnedalen valley and textured following the procedures described in the “Virtual reality implementation in Unity” section. Flow height and velocity are exported at 1 s time step for a total simulation time of 150 s. The same time step was considered when the frames were imported into Unity. A road using the EasyRoads3D v3 Unity asset (AndaSoft 2021) and some cars are added. In addition, a virtual river to imitate Mjåland river and vegetations were added to make the virtual environment close to the actual environment.

Debris flow visualization: a in RAMMS GUI, b in Unity
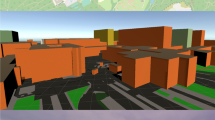
The debris flow event can be experienced with either a VR headset or through a desktop window. Hence, two scenes, a desktop version and a VR headset version are available. The desktop version provides a non-immersive experience where the user can navigate inside the virtual environment using a mouse and keyboard like computer games. In the VR scene, a user can get immersed inside the virtual environment and can move inside the scene using the controllers or use head rotation inside the scene while wearing the HMD to see the debris flow from different angles and positions (Fig. 7).

Screenshots from the VR environment: a from upstream in the channel; b taken from the road on the west side; c taken from the road on the east side; and d when the user is “hit” by the front of the debris flow on the road
This is because the HMD provides body tracking to let the user adjust his view inside the VR scene. Unlike the desktop version, the user is detached from the real environment and only experiences the virtual environment in the HMD. In addition, three videos have been produced for the interested reader; one from the animation of the RAMMS simulation (Supplementary file 1), the second a video captured while a user navigating inside the virtual environment using a computer mouse and keyboard keys (Supplementary file 2), and the third a video captured while the user is walking inside the virtual environment (Supplementary file 3).
Evaluation of the perception time
The debris flow risk can be spatially calculated as the product of the triggering probability, propagation probability, exposure of the elements at risk and their vulnerability. In particular, the numerical simulations performed using RAMMS are fundamental to evaluate the propagation of the landslide and the portions of the road that can potentially be affected by the debris flow event. However, the results from RAMMS (e.g., Fig. 6a) do not provide any information on how a person potentially affected by the debris flow perceives and would interact with the landslide event. Instead, the VR visualization may add further information about the interaction of users with the objects within the scene such as the debris flow hazard, the terrain, and the road. We tested these improved perception capabilities, by moving inside the VR environment. We observe a better feeling of the dimensions of the debris flow extent, steepness of the terrain and the depth of the flow, compared to traditional 2D visualization. Consistent with the studies made by Perlman et al. (2014) and Leder et al. (2019), VR has a superior advantage over traditional approaches to identify hazards more correctly.
As a practical application of the VR capabilities, we study the perception time of the debris flow, i.e., the time from the landslide initiation to the time when the debris flow can be seen flowing at a given location within VR environment. In particular, we are interested in analyzing at what time from triggering, the debris flow is observed if the user is located along the road (i.e., where the risk is higher). The front of the debris flow is computed in RAMMS to reach the road 90 s after initiation. Within the VR environment, we can however perceive and observe the debris flow just 25 s after initiation. Hence, the road user cannot recognize and perceive the hazard before this time. The evaluation of this time delay (from initiation to perception) would not have been possible by just using the 2D map from the numerical simulation, as it strongly depends on the three-dimensional topography and terrain features. Furthermore, the perception time depends on the location along the road and on the viewing direction.
We, therefore, calculate in VR the perception time at different locations along the road, as indicated by the 19 black points in Fig. 8, along a 520 m-long segment of the road. The points are 20–30 m apart. From the numerical simulation, the segment of the road between points 8–14 corresponds to the hazard zone. We hypothesize to be road users driving a car: therefore, our view wearing the HMD is directed along the road. Furthermore, we perform the analysis for a car coming from both West (e.g. Fig. 7b) and East (e.g. Fig. 7c) directions. The perception times at any point is shown in Fig. 9. It is observed that the debris flow is completely invisible from any location west of point 1 due to the hilly topography. Instead, the perception time of the debris flow is 32 s for each location east of point 19. Between points 1 and 19, the perception time varies between 72 and 92 s when travelling from West and between 32 and 98 s when traveling from East. These visualization simulations show that the perception time of the debris flow event can significantly change depending on the location along the road. This VR methodology may help to effectively design road networks and road signs in relation to possible debris flow events or to plan the position of early warning systems to stop cars in a safe position prior to the hazard zone.

Selected points along the road for VR visualization. The solid line indicates the affected segment of the road from the numerical simulation

Chart showing perception time with the location of the road user
Discussion and future applications
In addition to better hazard recognition, we believe that this improved visualization can have great potential application in (i) hazard communication; (ii) safety and rescue operations training; (iii) decision making; (iv) early warning systems; and (v) education.
Hazard communication to affected communities
As mentioned previously, risk maps are a fundamental instrument to plan mitigation measures by landslide experts. Such maps need however some level of expertise to be understood and fully implemented. A study made on risk perception and communication by Pedoth et al. (2021) showed there is a lack of knowledge in the general public about the existing hazard and risk maps. Improved communication and visualization of the landslide risk is therefore needed.
The approach in this work can fill the gap in knowledge by providing the visual and immersive experience capability of VR. Primarily, the dynamic 3D visualization of the debris flow in a virtual environment can improve the spatial cognitive efficiency for the debris flow disaster as it enables users to navigate easily inside the virtual environment as compared to the visualization in 2D hazard maps. The visualization in the game engine (e.g., Fig. 6b) provides a better understanding of the height of the debris flows compared to the visualization from the numerical simulation (Fig. 6a) with the heights represented in colors. This methodology can enhance the classical hazard mapping where the envelope of numerically computed flow heights is customized with the corresponding flow velocity and visualized in a 3D virtual environment.
Training module for the first responders for safety, rescue operation, and crisis management
Disaster scenes have paramount importance in studying emergency management of natural disasters. However, it is difficult to construct them in real life as they are expensive, and they might force subjects to experience real hazards. This methodology can depict a virtual environment with a realistic simulation of a debris flow disaster for safety and rescue operation training. Trainees may be placed into the virtual environment and learn how to rescue people or human infrastructures buried by the debris flow. Several studies revealed that VR is widely used for such purposes, in the fields of fire safety (Chittaro and Ranon 2009; Smith and Ericson 2009; Rüppel and Schatz 2011) and earthquakes (Gong et al. 2015; Ivanova et al. 2016; Feng et al. 2020). In our case, road users, early warning planners, and rescue operators can be trained on how and when to act after perceiving the debris flow hazard. The user could see the impact of being at different positions on perception and recognition of the hazard. By integrating time limitations and game rules into the interaction capability of the VR, it could evolve into a serious game. A serious game is a game whose primary purpose is not entertainment or fun (Mourali et al. 2020). Different scenarios could be created by changing the size of the release area of debris flow events or by including different preventive measures in the numerical simulation. VR-based serious games enable users to be realistic, engaging, and systematic (Catal et al. 2020). Furthermore, it could be used as part of a hazard perception test for traffic schools which helps drivers improve their perception towards natural hazards in addition to other man-made road hazards.
Decision-making
Decisions regarding public safety in hazard areas are usually made by various agencies and government authorities. The decisions are made based on the combination of experience, engineering practices, and politics. Planning decisions for mitigation measures are made with financial considerations often playing a major role. Such VR visualization will empower politicians and municipality authorities to accurately perceive the hazards and influence them in making adequate decisions.
Early warning system
Debris flow disasters frequently start from mountain areas and continue to flow downstream to plain areas where major infrastructure is often found. Video cameras (e.g., Liu et al. 2021) and GB-InSAR (e.g., Lombardi et al. 2017) may be used to detect landslide motion and activate an early warning system to block the road. The successful detection of the motion of the debris flow depends on the correct choice of the camera location and orientation of sight. Indeed, as shown and quantified in Fig. 9, the debris flow can be detected at times which can span from 30 to 100 s after initiation, depending on the location from where the debris flow is observed. Using VR visualization can complement field visits to test many potential locations to install a camera and choose the one which detects the debris flow at the earliest time possible.
Education
A significant number of studies have been done on the role of VR in shaping the current education system (e.g., Christou 2010; Chavez and Bayona 2018; Hu-Au and Lee 2018). The technology improves students’ engagement, provides an authentic experience, and offers new opportunities to visualize complex models. Our work can serve as a powerful teaching aid for classes on the topics of flow-type landslides. It can help the students in understanding the complex nature of the employed numerical method and to realize the extent of the hazard and elements at risk.
Conclusion
Several numerical models have been developed for carrying out the runout analysis of debris flow following its initiation. The immediate output results of the analysis are flow depth, velocity, and other parameters depending on the methods used. Most of the time the runout simulations are presented as hazard maps that are only understandable to experts. On the other hand, Immersive visualization technologies such as Virtual Reality (VR) and Augmented Reality (AR) offer new opportunities to communicate natural hazards to general experts and the public by providing a fully immersive and interactive experience. However, the integration of landslide numerical simulations into VR is still challenging, due to the limited ability of VR to cope with georeferenced spatial data.
This study attempted to develop a framework that integrates physically-based numerical debris flow simulation results into an open-source VR software. A particular debris flow event, which happened in Hunnedalen (Norway) in 2016, was selected for demonstration to guide the development of the framework. The debris flow was back-calculated with a depth-averaged debris-flow simulation software. The results of the back-calculation were discussed. The virtual reality 3D scene was therefore constructed from the digital terrain model of the area in which the event happened; consecutive images were superimposed into the terrain depicting the evolution of flow heights, as computed by the numerical software. The texture of the images in VR was controlled by the flow velocity obtained from the numerical simulation. Furthermore, we inserted in VR the road infrastructure located at the base of the debris flow channel. Within the VR environment, we therefore calculated the time at which a road user would perceive the debris flow from landslide initiation. This quantification may be used for better planning of road networks, mitigation measures and to study the optimal location of early warning systems.
The present study has attempted to highlight the importance of bringing scientific numerical simulation of debris flow into VR visualization so that the wider public will get the opportunity to understand the debris flow hazard. Within the scope of disaster planning, it has the potential to improve hazard perception, decision making and recognition by the public. Our work may also serve as a starting point to include serious gamification within VR. It can also become a powerful training tool for safety, rescue operation and emergency planning on debris flow hazards.
References
AndaSoft (2021) EasyRoads3D V3 Manual. http://www.easyroads3d.com/v3/manualv3.html. Accessed 31 Aug 2021
Bartelt P, Bieler C, Bühler Y et al (2017) Manual RAMMS - rapid mass movements simulation. 1–116
Berger C, McArdell BW, Schlunegger F (2011) Direct measurement of channel erosion by debris flows, Illgraben, Switzerland. J Geophys Res Earth Surf 116:1–18. https://doi.org/10.1029/2010JF001722
Brito A (2018) Blender Quick Start Guide: 3D modeling, animation, and render with Eevee in Blender 2.8. Packt Publishing
Catal C, Akbulut A, Tunali B et al (2020) Evaluation of augmented reality technology for the design of an evacuation training game. Virtual Real 24:359–368. https://doi.org/10.1007/s10055-019-00410-z
Chavez B, Bayona S (2018) Virtual reality in the learning process BT - trends and advances in information systems and technologies. In: Adeli H, Reis LP, Costanzo S (eds) Rocha Á. Springer International Publishing, Cham, pp 1345–1356
Chittaro L, Ranon R (2009) Serious games for training occupants of a building in personal fire safety skills. In: 2009 Conference in games and virtual worlds for serious applications. pp 76–83
Christen M, Kowalski J, Bartelt P (2010) RAMMS: Numerical simulation of dense snow avalanches in three- dimensional terrain Cold Regions Science and Technology RAMMS: Numerical simulation of dense snow avalanches in three-dimensional terrain. Cold Reg Sci Technol 63:1–14. https://doi.org/10.1016/j.coldregions.2010.04.005
Christou C (2010) Virtual reality in education. Affect Interact Cogn Methods E-Learning Des Creat an Optim Educ Exp. https://doi.org/10.4018/978-1-60566-940-3.ch012
Feng Z, González VA, Amor R et al (2020) An immersive virtual reality serious game to enhance earthquake behavioral responses and post-earthquake evacuation preparedness in buildings. Adv Eng Informatics 45:101118. https://doi.org/10.1016/j.aei.2020.101118
Frank F, McArdell BW, Huggel C, Vieli A (2015) The importance of entrainment and bulking on debris flow runout modeling: examples from the Swiss Alps. Nat Hazards Earth Syst Sci 15:2569–2583. https://doi.org/10.5194/nhess-15-2569-2015
Gong X, Liu Y, Jiao Y et al (2015) A novel earthquake education system based on virtual reality. IEICE Trans Inf Syst E98.D:2242–2249. https://doi.org/10.1587/transinf.2015EDP7165
Gray JMNT, Wieland M, Hutter K (1999) Gravity-driven free surface flow of granular avalanches over complex basal topography. Proc Rayal Sci A 455:1841–1874. https://doi.org/10.1098/rspa.1999.0383
Haas JK (2014) A history of the Unity game engine
Hanssen-Bauer I, Førland EJ, Haddeland I et al (2017) Climate in Norway 2100-a knowledge base for climate adaptation
Haque U, Blum P, Da silva A, et al (2016) Fatal landslides in Europe. Landslides. https://doi.org/10.1007/s10346-016-0689-3
Havenith H-B (2021) 3D Landslide models in VR BT - understanding and reducing landslide disaster risk: volume 4 testing, modeling and risk assessment. In: Sassa K, Bobrowsky PT, Takara K (eds) Tiwari B. Springer International Publishing, Cham, pp 195–204
Hu-Au E, Lee J (2018) Virtual reality in education: a tool for learning in the experience age. Int J Innov Educ. https://doi.org/10.1504/IJIIE.2017.10012691
Irshad S, Alene GH, Godara N et al (2021) A virtual reality tool for hazard and risk mitigation of landslides through serious gamification. 14th Congress INTERPRAEVENT 2021: Natural hazards in a changing world. International Research Society INTERPRAEVENT, Bergen, pp 331–338
Ivanova N, Gugleva V, Dobreva M et al (2016) Intelligent VR-AR for natural disasters management. Intech i:13. https://doi.org/10.5772/intechopen.99337
Iverson RM (1997) The physics of debris flows. Rev Geophys 35:245–296
Johnson CG, Kokelaar BP, Iverson RM et al (2012) Grain-size segregation and levee formation in geophysical mass flows. J Geophys Res Earth Surf 117:1–23. https://doi.org/10.1029/2011JF002185
Kwan J, Sze E, Lam C (2019) Finite Element Analysis for Rockfall and Debris Flow Mitigation Works. Canadian Geotech J 56:1225–1250. https://doi.org/10.1139/cgj-2017-0628
Leder J, Horlitz T, Puschmann P et al (2019) Comparing immersive virtual reality and powerpoint as methods for delivering safety training: Impacts on risk perception, learning, and decision making. Saf Sci 111:271–286. https://doi.org/10.1016/j.ssci.2018.07.021
Liu K-F, Kuo T-I, Wei S-C (2021) Debris flow detection using a video camera BT - understanding and reducing landslide disaster risk: volume 3 monitoring and early warning. In: Tofani V, Sassa K et al (eds) Casagli N. Springer International Publishing, Cham, pp 141–147
Lombardi L, Nocentini M, Frodella W et al (2017) The Calatabiano landslide (southern Italy): preliminary GB-InSAR monitoring data and remote 3D mapping. Landslides 14:685–696
McDougall S (2006) A new continuum dynamic model for the analysis of extremely rapid landslide motion across complex 3D terrain. University of British Columbia
Meta Platforms Inc (2021) Oculus Link compatibility. https://store.facebook.com/en-gb/help/quest/articles/headsets-and-accessories/oculus-link/oculus-link-compatibility/
Meyer NK, Schwanghart W, Korup O, Nadim F (2015) Roads at risk: traffic detours from debris flows in southern Norway. Nat Hazards Earth Syst Sci 15:985–995. https://doi.org/10.5194/nhess-15-985-2015
Mourali Y, Agrebi M, Ezzedine H et al (2020) A review on E-learning: perspectives and challenges
Ondercin M (2016) An Exploration of rockfall modelling through game engines. Queen’s University
Pedoth L, Stawinoga AE, Koboltschnig G (2021) Knowledge and perception of natural hazards : results from population surveys to innovate risk communication. 14th Congress INTERPRAEVENT 2021: Natural hazards in a changing world. International Research Society INTERPRAEVENT, Bergen, pp 33–40
Perlman A, Sacks R, Barak R (2014) Hazard recognition and risk perception in construction. Saf Sci 64:22–31. https://doi.org/10.1016/j.ssci.2013.11.019
Rüppel U, Schatz K (2011) Designing a BIM-based serious game for fire safety evacuation simulations. Adv Eng Informatics 25:600–611. https://doi.org/10.1016/j.aei.2011.08.001
Sanders A (2016) An introduction to unreal engine 4. A. K. Peters, Ltd., USA
Savage SB, Hutter K (1989) The motion of a finite mass of granular material down a rough incline. J Fluid Mech 199:177–215. https://doi.org/10.1017/S0022112089000340
Smith S, Ericson E (2009) Using immersive game-based virtual reality to teach fire-safety skills to children. Virtual Real 13:87–99. https://doi.org/10.1007/s10055-009-0113-6
Tayyebi SM, Pastor M, Yifru AL, Thakur V (2021) Two-phase SPH–FD depth-integrated model for debris flows: application to basal grid brakes. Géotechnique 1-16. https://doi.org/10.1680/jgeot.21.00080
Unity Technologies (2020) Universal Render Pipeline overview. https://docs.unity3d.com/Packages/com.unity.render-pipelines.universal@11.0/manual/index.html
Unity Technologies (2021a) XR Interaction Toolkit. https://docs.unity3d.com/Packages/com.unity.xr.interaction.toolkit@0.9/manual/index.html. Accessed 30 Aug 2021a
Unity Technologies (2021b) Oculus XR Plugin. https://docs.unity3d.com/Manual/com.unity.xr.oculus.html. Accessed 30 Aug 2021b
Unity Technologies (2021c) System requirements for Unity 2021c LTS. https://docs.unity3d.com/2020.1/Documentation/Manual/system-requirements.html
Vicari H, Nordal S, Thakur V (2021) The significance of entrainment on debris flow modelling: the case of Hunnedalen, Norway. In: Lecture Notes in Civil Engineering. pp 507–514
Funding
Open access funding provided by NTNU Norwegian University of Science and Technology (incl St. Olavs Hospital - Trondheim University Hospital). This study was funded by the World of Wild Waters (WoWW) project, which belongs Norwegian University of Science and Technology (NTNU)’s Digital Transformation initiative.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file2 (MP4 44587 KB)
Supplementary file3 (MP4 384081 KB)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alene, G.H., Vicari, H., Irshad, S. et al. Realistic visualization of debris flow type landslides through virtual reality. Landslides 20, 13–23 (2023). https://doi.org/10.1007/s10346-022-01948-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10346-022-01948-x