
Abstract
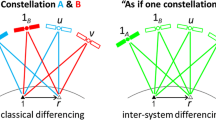
Inter-system biases (ISB) are of great relevance for the combined processing of the code and phase data of multiple global navigation satellite systems (GNSSs). Calibrating the ISB makes it possible to enhance the interoperability among different GNSS constellations and thus benefits multi-GNSS-based positioning, navigation and timing applications. Initial investigations of the characteristics of ISB have been carried out, usually making use of overlapping frequencies and adopting the double-differenced (DD) model. However, this approach seems inapplicable when dealing with ISB for non-overlapping frequencies. We identify the estimability of the ISB by using the ionospheric-float, ionospheric-fixed and ionospheric-weighted models formulated on the basis of between-receiver single-differenced (SD) multi-GNSS observation equations, resulting in the so-called SD method, which is capable of estimating the ISB in case of both overlapping and non-overlapping frequencies. Using dual-frequency data for short and medium baselines, we analyze 30-s epoch-by-epoch estimates of the GPS–Galileo and GPS–BDS ISB. The quantitative results indicate that the same conclusion is reached using either the SD method or the customary method based on DD observations (called the DD method); that is, the code and phase ISB time series are both approximately constant on a time scale of a few days from a statistical perspective. However, the SD method has the advantage that it can be used to flexibly estimate ISB for both overlapping and non-overlapping frequencies and thus can be better applied for real-time kinematic positioning than the DD method. Furthermore, the multi-GNSS positioning accuracy using inter-system differencing can be improved by 20–35%, as compared to the SD classical differencing in which S-basis is selected per constellation, thanks to the reasonable calibration of the ISB.







Similar content being viewed by others
References
Dalla Torre A, Caporali A (2015) An analysis of intersystem biases for multi-GNSS positioning. GPS Solut 19(2):297–307
Deng C, Tang W, Liu J, Shi C (2014) Reliable single-epoch ambiguity resolution for short baselines using combined GPS/BeiDou system. GPS Solut 18(3):375–386
Gao W, Gao C, Pan S, Meng X, Xia Y (2017) Inter-system differencing between GPS and BDS for medium-baseline RTK positioning. Remote Sens. https://doi.org/10.3390/rs9090948
Gioia C, Borio D (2016) A statistical characterization of the Galileo-to-GPS inter-system bias. J Geodesy 90(11):1279–1291
Jiang N, Xu Y, Xu T, Xu G, Sun Z, Schuh H (2017) GPS/BDS short-term ISB modelling and prediction. GPS Solut 21(1):163–175
Li X, Ge M, Dai X, Ren X, Fritsche M, Wickert J, Schuh H (2015) Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J Geodesy 89(6):607–635. https://doi.org/10.1007/s00190-015-0802-8
Li X, Li X, Yuan Y, Zhang K, Zhang X, Wickert J (2017) Multi-GNSS phase delay estimation and PPP ambiguity resolution: GPS, BDS, GLONASS, Galileo. J Geodesy 92(6):579–608. https://doi.org/10.1007/s00190-017-1081-3
Liu X, Tiberius C, de Jong K (2004) Modelling of differential single difference receiver clock bias for precise positioning. GPS Solut 7(4):209–221. https://doi.org/10.1007/s10291-003-0079-x
Liu T, Zhang B, Yuan Y, Li Z, Wang N (2018) Multi-GNSS triple-frequency differential code bias (DCB) determination with precise point positioning (PPP). J Geodesy. https://doi.org/10.1007/s00190-018-1194-3
Mi X, Zhang B, Yuan Y (2019) Stochastic modeling of between-receiver single-differenced ionospheric delays and its application to medium baseline RTK positioning. Meas Sci Technol. https://doi.org/10.1088/1361-6501/ab11b5
Nadarajah N, Teunissen PJG, Raziq N (2013) BeiDou inter-satellite-type bias evaluation and calibration for mixed receiver attitude determination. Sensors (Basel) 13(7):9435–9463. https://doi.org/10.3390/s130709435
Nadarajah N, Teunissen PJG, Sleewaegen J-M, Montenbruck O (2014) The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut 19(3):357–368. https://doi.org/10.1007/s10291-014-0392-6
Odijk D (2014) Improving ambiguity resolution by applying ionosphere corrections from a permanent GPS array. Earth Planets Space 52(10):675–680. https://doi.org/10.1186/bf03352262
Odijk D, Teunissen PJG (2012) Characterization of between-receiver GPS–Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut 17(4):521–533. https://doi.org/10.1007/s10291-012-0298-0
Odijk D, Teunissen PJG (2013) Estimation of differential inter-system biases between the overlapping frequencies of GPS, Galileo, BeiDou and QZSS. In: Proceedings of the 4th international colloquium scientific and fundamental aspects of the Galileo programme, Prague, Czech Republic, 4–6 Dec, p 8
Odijk D, Nadarajah N, Zaminpardaz S, Teunissen PJG (2016) GPS, Galileo, QZSS and IRNSS differential ISBs: estimation and application. GPS Solut 21(2):439–450. https://doi.org/10.1007/s10291-016-0536-y
Odolinski R, Teunissen PJG (2016) Single-frequency, dual-GNSS versus dual-frequency, single-GNSS: a low-cost and high-grade receivers GPS–BDS RTK analysis. J Geodesy 90(11):1255–1278. https://doi.org/10.1007/s00190-016-0921-x
Odolinski R, Teunissen PJG (2017) Low-cost, 4-system, precise GNSS positioning: a GPS, technology. https://doi.org/10.1088/1361-6501/aa92eb
Odolinski R, Teunissen PJG, Odijk D (2014a) Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut 19(1):151–163. https://doi.org/10.1007/s10291-014-0376-6
Odolinski R, Teunissen PJG, Odijk D (2014b) First combined COMPASS/BeiDou-2 and GPS positioning results in Australia. Part II: single- and multiple-frequency single-baseline RTK positioning. J Spat Sci 59(1):25–46. https://doi.org/10.1080/14498596.2013.866913
Odolinski R, Teunissen PJG, Odijk D (2015) Combined GPS + BDS for short to long baseline RTK positioning. Meas Sci Technol. https://doi.org/10.1088/0957-0233/26/4/045801
Paziewski J, Wielgosz P (2014) Accounting for Galileo–GPS inter-system biases in precise satellite positioning. J Geodesy 89(1):81–93. https://doi.org/10.1007/s00190-014-0763-3
Paziewski J, Sieradzki R, Wielgosz P (2015) Selected properties of GPS and Galileo–IOV receiver intersystem biases in multi-GNSS data processing. Meas Sci Technol 26(9):095008. https://doi.org/10.1088/0957-0233/26/9/09500
Teunissen PJG, Amiri-Simkooei AR (2007) Least-squares variance component estimation. J Geodesy 82(2):65–82. https://doi.org/10.1007/s00190-007-0157-x
Tian Y, Ge M, Neitzel F, Zhu J (2017) Particle filter-based estimation of inter-system phase bias for real-time integer ambiguity resolution. GPS Solut 21(3):949–961
Tiberius CCJM, Kenselaar F (2013) Estimation of the stochastic model for GPS code and phase observables. Surv Rev 35(277):441–454. https://doi.org/10.1179/sre.2000.35.277.441
Wang L, Feng Y, Guo J (2016a) Reliability control of single-epoch RTK ambiguity resolution. GPS Solut 21:591–604. https://doi.org/10.1007/s10291-016-0550-0
Wang N, Yuan Y, Li Z, Montenbruck O, Tan BF (2016b) Determination of differential code biases with multi-GNSS observations. J Geodesy 90(3):209–228
Wielgosz P (2010) Quality assessment of GPS rapid static positioning with weighted ionospheric parameters in generalized least squares. GPS Solut 15(2):89–99. https://doi.org/10.1007/s10291-010-0168-6
Zhang B, Teunissen PJG, Yuan Y (2016) On the short-term temporal variations of GNSS receiver differential phase biases. J Geodesy 91(5):563–572. https://doi.org/10.1007/s00190-016-0983-9
Zhang B, Liu T, Yuan Y (2017) GPS receiver phase biases estimable in PPP-RTK networks: dynamic characterization and impact analysis. J Geodesy 92(6):659–674. https://doi.org/10.1007/s00190-017-1085-z
Zhang B, Chen Y, Yuan Y (2018) PPP-RTK based on undifferenced and uncombined observations: theoretical and practical aspects. J Geodesy. https://doi.org/10.1007/s00190-018-1220-5
Acknowledgments
Many thanks are due to Curtin University and Hong Kong SatRef for providing GNSS data. This work was funded by the National Natural Science Foundation of China (Nos. 41604031, 41774042, and 41621091) and the National Key Research Program of China Collaborative Precision Positioning Project (No. 2016YFB0501900). The second author is supported by the CAS Pioneer Hundred Talents Program. The third author acknowledges the LU JIAXI International team program supported by the K.C. Wong Education Foundation and CAS.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Mi, X., Zhang, B. & Yuan, Y. Multi-GNSS inter-system biases: estimability analysis and impact on RTK positioning. GPS Solut 23, 81 (2019). https://doi.org/10.1007/s10291-019-0873-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-019-0873-8