
Abstract
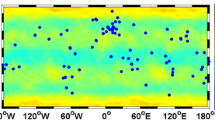
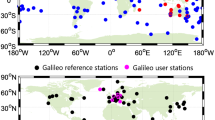
This paper focuses on the precise point positioning (PPP) ambiguity resolution (AR) using the observations acquired from four systems: GPS, BDS, GLONASS, and Galileo (GCRE). A GCRE four-system uncalibrated phase delay (UPD) estimation model and multi-GNSS undifferenced PPP AR method were developed in order to utilize the observations from all systems. For UPD estimation, the GCRE-combined PPP solutions of the globally distributed MGEX and IGS stations are performed to obtain four-system float ambiguities and then UPDs of GCRE satellites can be precisely estimated from these ambiguities. The quality of UPD products in terms of temporal stability and residual distributions is investigated for GPS, BDS, GLONASS, and Galileo satellites, respectively. The BDS satellite-induced code biases were corrected for GEO, IGSO, and MEO satellites before the UPD estimation. The UPD results of global and regional networks were also evaluated for Galileo and BDS, respectively. As a result of the frequency-division multiple-access strategy of GLONASS, the UPD estimation was performed using a network of homogeneous receivers including three commonly used GNSS receivers (TRIMBLE NETR9, JAVAD TRE_G3TH DELTA, and LEICA). Data recorded from 140 MGEX and IGS stations for a 30-day period in January in 2017 were used to validate the proposed GCRE UPD estimation and multi-GNSS dual-frequency PPP AR. Our results show that GCRE four-system PPP AR enables the fastest time to first fix (TTFF) solutions and the highest accuracy for all three coordinate components compared to the single and dual system. An average TTFF of 9.21 min with \(7{^{\circ }}\) cutoff elevation angle can be achieved for GCRE PPP AR, which is much shorter than that of GPS (18.07 min), GR (12.10 min), GE (15.36 min) and GC (13.21 min). With observations length of 10 min, the positioning accuracy of the GCRE fixed solution is 1.84, 1.11, and 1.53 cm, while the GPS-only result is 2.25, 1.29, and 9.73 cm for the east, north, and vertical components, respectively. When the cutoff elevation angle is increased to \(30{^{\circ }}\), the GPS-only PPP AR results are very unreliable, while 13.44 min of TTFF is still achievable for GCRE four-system solutions.






























Similar content being viewed by others

References
Bisnath S, Gao Y (2008) Current state of precise point positioning and future prospects and limitations. In: Sideris MG (ed) Observing our changing earth. Springer, New York, pp 615–623
China Satellite Navigation Office (CSNO) (2012) BeiDou navigation satellite system signal in space interface control document. http://gge.unb.ca/test/beidou_icd_english.pdf
Collins P, Lahaye F, Herous P, Bisnath S (2008) Precise point positioning with AR using the decoupled clock model. In: Proceedings of the ION GNSS 2008, Savannah, 16–19 Sept, pp 1315–1322
de Selding PB (2014) ESA proceeding with Galileo launches despite in-orbit satellite issues. SpaceNews. http://spacenews.com/41616esa-proceeding-with-galileo-launches-despite-in-orbitsatellite-Issues
Dong D, Bock Y (1989) Global positioning system network analysis with phase ambiguity resolution applied to crustal deformation studies in California. J Geophys Res 94(B4):3949–3966
Feng Y, Wang J (2008) GPS RTK performance characteristics and analysis. J Glob Position Syst 7(1):1–8
Gabor MJ, Nerem RS (1999) GPS carrier phase AR using satellite single difference. In: Proceedings of the ION GNSS 1999, Institute of Navigation, Nashville, 14–17 Sept, pp 1569–1578
Gao W, Gao C, Pan S, Wang D, Deng J (2015) Improving ambiguity resolution for medium baselines using combined GPS and BDS dual/triple-frequency observations. Sensors 15(11):27525–27542
Ge M, Gendt G, Rothacher M, Shi C, Liu J (2008) Resolution of GPS carrier phase ambiguities in precise point positioning (PPP) with daily observations. J Geod 82(7):389–399
Geng J, Teferle FN, Shi C, Meng X, Dodson AH, Liu J (2009) Ambiguity resolution in precise point positioning with hourly data. GPS Solut 13(4):263–270
Geng J, Teferle FN, Meng X, Dodson AH (2011) Towards PPP-RTK: ambiguity resolution in real-time precise point positioning. Adv Space Res 47(10):1664–1673
Geng J, Bock Y (2016) GLONASS fractional-cycle bias estimation across inhomogeneous receivers for PPP ambiguity resolution. J Geod 90(4):379–396
Han S (1997) Quality-control issues relating to instantaneous ambiguity resolution for real-time GPS kinematic positioning. J Geod 71(6):351–361
Hatch R (1982) The synergism of GPS code and carrier measurements. In: Proceedings of the third international symposium on satellite Doppler positioning at Physical Sciences Laboratory of New Mexico State University, 8–12 Feb, vol 2, pp 1213–1231
Hofmann-Wellenhof B, Lichtenegger H, Wasle E (2008) GNSS: global navigation satellite systems: GPS, Glonass, Galileo, and more. Springer, New York
Kouba J, Héroux P (2001) Precise point positioning using IGS orbit and clock products. GPS Solut 5(2):12–28
Kouba J (2009) A guide to using International GNSS Service (IGS) products. http://igscb.jpl.nasa.gov/igscb/resource/pubs/UsingIGSProductsVer21.pdf
Laurichesse D, Mercier F, Berthias JP, Broca P, Cerri L (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navigation 56(2):135–149
Li P, Zhang X (2015) Precise point positioning with partial ambiguity fixing. Sensors 15(6):13627–13643
Li P, Zhang X, Ren X, Zuo X, Pan Y (2016) Generating gps satellite fractional cycle bias for ambiguity-fixed precise point positioning. Gps Solut 20(4):1–12
Li X, Ge M, Zhang H, Wickert J (2013) A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J Geod 87:405–416
Li X, Zhang X, Ge M (2011) Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J Geod 85(3):151–158
Li X, Zhang X (2012) Improving the estimation of uncalibrated fractional phase offsets for PPP ambiguity resolution. Navigation 65(3):513–529
Li X, Dick G, Ge M, Helse S, Wickert J, Bender M (2014) Real-time GPS sensing of atmospheric water vapor: precise point positioning with orbit, clock, and phase delay corrections. Geophys Res Lett 41:3615–3621. https://doi.org/10.1002/2013GL058721
Li X, Ge M, Dai X, Ren X, Fritsche M, Wickert J, Schuh H (2015) Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J Geod 89:607–635
Liu J, Ge M (2003) PANDA software and its preliminary result of positioning and orbit determination. J Nat Sci Wuhan Univ 8(2B):603–609. https://doi.org/10.1007/BF02899825
Liu Y, Ye S, Song W, Lou Y, Chen D (2017a) Integrating GPS and BDS to shorten the initialization time for ambiguity-fixed PPP. GPS Solut 21(2):333–343
Liu Y, Song W, Lou Y, Ye S, Zhang R (2017b) GLONASS phase bias estimation and its PPP ambiguity resolution using homogeneous receivers. GPS Solut 21(2):427–437
Liu Y, Ye S, Song W, Lou Y, Gu S (2017c) Rapid PPP ambiguity resolution using GPS+GLONASS observations. J Geod 91(4):441–455
Loyer S, Perosanz F, Mercier F, Capdeville H, Marty J (2012) Zerodifference GPS ambiguity resolution at CNES-CLS IGS analysis center. J Geod 86(11):991–1003
Melbourne WG (1985) The case for ranging in GPS-based geodetic systems. In: Proceedings of the first international symposium on precise positioning with the global positioning system, Rockville, 15–19 April
Montenbruck O, Steigenberger P, Khachikyan R, Weber G, Langley RB, Mervart L, Hugentobler U (2014) IGSMGEX: preparing the ground for multi-constellation GNSS science. Inside GNSS 9(1):42–49
Montenbruck O, Steigenberger P, Prange L, Deng Z, Zhao Q, Perosanz F, Romero I, Noll C, Stürze A, Weber G, Schmid R, Macleod K, Schaer S (2017) The multi-GNSS experiment (MGEX) of the international GNSS service (IGS)—achievements, prospects and challenges. Adv Space Res 59:1671–1697
Reussner N, Wanninger L (2011) GLONASS inter-frequency biases and their effects on RTK and PPP carrier phase ambiguity resolution. In: Proceedings of the ION GNSS 2011, Institute of Navigation, Portland, 19–23 Sept, pp 712–716
Rizos C, Montenbruck O, Weber R, Neilan R, Hugentobler U (2013) The IGS MGEX experiment as a milestone for a comprehensive multi-GNSS service. In: Proceedings of ION PNT 2013, Institute of Navigation, Honolulu, pp 289–295
Teunissen PJG (1990) An integrity and quality control procedure for use in multi sensor integration. In: Proceedings ION-GPS, pp 513–522
Teunissen PJG (1995) The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation. J Geod 70(1–2):65–82
Teunissen PJG, Joosten P, Tiberius CCJM (1999) Geometry-free ambiguity success rates in case of partial fixing[J]. In: Proceedings of the National Technical Meeting of the Institute of Navigation, pp 201–207
Urlichich Y, Subbotin V, Stupak G, et al (2011) GLONASS modernization. In: ION GNSS+ 2011. pp 3125–3128
Uhlemann M, Gendt G, Ramatschi M, Deng Z (2015) GFZ global multi-GNSS network and data processing results. In: International Association of Geodesy Symposia, pp 673–679
Wang G, Jong KD, Zhao Q, Hu Z, Guo J (2015) Multipath analysis of code measurements for BeiDou geostationary satellites. GPS Solut 19(1):129–139
Wanninger L (2012) Carrier phase inter-frequency biases of GLONASS receivers. J Geod 86(2):139–148
Wanninger L, Beer S (2015) BeiDou satellite-induced code pseudorange variations: diagnosis and therapy. GPS Solut 19(4):639–648
Wübbena G (1985) Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements. In: Proceedings of the first international symposium on precise positioning with the global positioning system, Rockville
Yamada H, Takasu T, Kubo N, Yasuda A (2010) Evaluation and calibration of receiver inter-channel biases for RTK-GPS/GLONASS. In: Proceedings of the ION GNSS 2010, Institute of Navigation, Portland, 21–24 Sept, pp 1580–1587
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
See Tables 7, 8, 9, 10, 11, 12, 13.
Rights and permissions
About this article

Cite this article
Li, X., Li, X., Yuan, Y. et al. Multi-GNSS phase delay estimation and PPP ambiguity resolution: GPS, BDS, GLONASS, Galileo. J Geod 92, 579–608 (2018). https://doi.org/10.1007/s00190-017-1081-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-017-1081-3