
Abstract
Recent literature has revealed that when users reach to select objects in VR, they can adapt how they move (i.e., the kinematic properties of their reaches) depending on the: (1) direction they move, (2) hand they use, and (3) side of the body where the movement occurs. In the present work, we took a more detailed look at how kinematic properties of reaching movements performed in VR change as a function of movement direction for reaches performed on each side of the body using each hand. We focused on reaches in 12 different directions that either involved moving inward (toward the body midline) or outward (away from the body midline). Twenty users reached in each direction on both left and right sides of their body, using both their dominant and non-dominant hands. The results provided a fine-grained account of how kinematic properties of virtual hand reaches change as a function of movement direction when users reach on either side of their body using either hand. The findings provide practitioners insights on how to interpret the kinematic properties of reaching behaviors in VR, which has applicability in emerging contexts that include detecting VR usability issues and using VR for stroke rehabilitation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
1.1 Background
Virtual hand interactions are among the most common ways users select and manipulate objects in virtual reality (VR) displays. These interactions allow users to control the position, orientation, and grasping behaviors of virtual hands by using handheld controllers in the physical world (Mine 1995; Poupyrev & Ichikawa 1999). One common type of virtual hand interaction is virtual hand reaching, in which users begin with their hand at a given starting point and reach to select a target location somewhere in the virtual environment. Virtual hand reaches can be part of many tasks that users perform in VR, such as selecting options on a virtual menu, typing on a virtual keyboard, or picking up a virtual object.
From a motor control perspective, virtual hand reaching is effectively the VR analog of a class of arm movements known as goal-directed reaching movements (Elliott et al. 2010; Woodworth 1899), which occur when a user needs to reach their hand from one spatial location to another as quickly and accurately as possible. Goal-directed reaches are a core building block of everyday human motor behavior and have been studied extensively in the motor control literature. Given that virtual hand reaches are effectively goal-directed reaching movements performed in VR, this body of work and its associated tools can be useful for understanding users’ behaviors during virtual hand reaching. Specifically, since modern VR systems already track the position of users’ hands to enable virtual hand interactions, kinematic analysis (KA) can be used to extract movement metrics that describe various useful properties of goal-directed reaching movements performed in VR (e.g., speed, efficiency, smoothness). This type of analysis can be particularly useful in VR applications where there is value in measuring different properties of a user’s reaching movements, such as when monitoring a patient’s arm function recovery during VR-based stroke rehabilitation programs (e.g., Park et al. 2021; Salisbury et al. 2020) or tracking learners’ progress during VR-based motor skills training (e.g., Abich et al. 2021; Radhakrishnan et al. 2021).
1.2 Motivation
Past work in movement science suggests that some kinematic properties of goal-directed reaching movements may change when users reach in different directions (i.e., movement direction). Reaching kinematics may also change depending on whether a reach is performed using the dominant or non-dominant arm (i.e., hand dominance), or whether a reach occurs on the same or opposite side of the user’s body from the reaching arm (i.e., interaction hemispace). These three factors tend to vary naturally during virtual hand reaching as interactions can require users to move in many different directions, on either side of their body, using either of their hands. Modulating these factors can change the underlying dynamics of the reaching task (in the case of movement direction and interaction hemispace; e.g., Mira et al. 2021; Vandenberghe et al. 2012), or which of the two specialized hemisphere-limb systems performs the reaching movement (in the case of hand dominance; e.g., Sainburg 2002, 2014). As users adapt their reaching behaviors to optimize performance subject to different constraints (e.g., Elliott et al. 2010; Todorov & Jordan 2002), this can change the kinematic properties of their reaches.
Given that these effects can be present, it is important to understand how these three factors—movement direction, hand dominance, and interaction hemispace—can influence the kinematic properties of virtual hand reaching movements. This understanding will be especially important for several types of ongoing work at the intersection of human movement science and virtual reality. For research and design efforts focused on improving the user experience of VR interfaces, this understanding can provide unique insights into how users behave while interacting with emerging consumer VR interfaces. Namely, KA techniques could be used to enhance predictive models of motor behavior and to anticipate how users will move while interacting with VR systems. This understanding could also support work in several emerging application areas where KA techniques show promise for answering questions about users’ movement behaviors in VR. For example, KA techniques could be used to quantify and monitor patients’ recovery during VR-based motor rehabilitation (e.g., Park et al. 2021; Salisbury et al. 2020) and to monitor learners’ progress during VR-based motor skills training (e.g., Abich et al. 2021; Radhakrishnan et al. 2021). In both cases, understanding how factors such as movement direction, hand dominance, and interaction hemispace influence the kinematic properties of reaching movements in VR can help researchers and practitioners to interpret kinematic results obtained in these contexts more precisely.
In the present work, we began to address these needs by examining how several different kinematic properties of virtual hand reaching movements change when users reach in 12 different directions (movement direction), on both the left and right sides of their body, using both their dominant and non-dominant arms. This enabled us to investigate if and how the effects of movement direction on the kinematic properties of virtual hand reaches may be different depending on the hand used to perform movements (hand dominance) and/or the side of the body where movements occur (interaction hemispace). To our knowledge, the findings provided the most detailed account to date of how these three factors interact to influence the kinematic properties of virtual hand reaching movements. In the sections below, we provide a review of related work and highlight how the present work expands on past findings. We then discuss the aims and the research questions of the present study in greater detail.
2 Related work
2.1 The effects of movement direction on reaching kinematics
Evidence from two different bodies of past work suggests that reaching in different movement directions can influence the kinematic properties of virtual hand reaching movements. First, a handful of studies to-date have directly examined the effects of movement direction on the kinematic properties of virtual hand reaching movements (i.e., unconstrained 3D reaching movements performed in VR; Arlati et al. 2021; Clark et al. 2020; Clark & Riggs 2020; Knaut et al. 2009; Lubos et al. 2014). Second, a much larger number of studies to-date have examined the kinematic properties of reaching movements performed in slightly different task contexts. This includes studies that have examined 3D reaches performed to physical targets (e.g., Bradshaw et al. 1990; Keulen et al. 2007; Xiao et al. 2019), 2D reaching where the hand can only move in the horizontal plane (e.g., Berret et al. 2021; Thompson et al. 2007), reciprocal pointing involving repeated selection of two target locations (e.g., Batmaz et al. 2019; Machuca & Stuerzlinger 2019), uncorrected 3D reaching movements (e.g., Papaxanthis et al. 1998; Shemmell et al. 2007), and reaches performed without visual feedback of the hand (e.g., Stewart et al. 2013; Tomlinson & Sainburg 2012).
These studies have examined the kinematic properties of reaches in several different sets of movement directions. For example, some studies have compared the kinematic properties of right-handed reaches that either involved moving away from the user’s body and to the right or away and to the left. This work has found evidence that reaches away from the body and to the right can tend to reach faster speeds (i.e., larger peak velocity; Archambault et al. 1999; Berret et al. 2021; Knaut et al. 2009; Stewart et al. 2013; Waters & Wade 2021; Xiao et al. 2019) and take less time to complete (i.e., smaller movement times; Archambault et al. 1999; Berret et al. 2021; Carson et al. 1990; Gutierrez-Herrera et al. 2017; Kim et al. 2011; Stewart et al. 2013) than movements away and to the left. Other studies have examined the kinematic properties of reaches that involved moving away from the user’s body in depth, compared to reaches that involved moving to the left or right of the starting location at a constant depth. These studies have provided evidence that reaches involving a change in depth can take longer to perform (i.e., larger movement time; Batmaz et al. 2019; Grossman & Balakrishnan 2004; Machuca & Stuerzlinger 2019; Thompson et al. 2007; c.f., Clark & Riggs 2020; Lyons et al. 2006) and achieve slower speeds (i.e., smaller peak velocity; Thompson et al. 2007; Waters & Wade 2021) than reaches to the left or right of the starting position at a constant depth. In a similar vein, researchers have also found differences in various kinematic measures between reaches that involve (a) moving downward, compared to upward (Bennett et al. 2012; Burkitt et al. 2017; Lyons et al. 2006; Roberts 2020; c.f., Clark & Riggs 2020), (b) moving away from the body and down, compared to away from the body and up (Cha & Myung 2013; Murata & Iwase 2001; c.f., Lubos et al. 2014), and (c) directly to the left, compared to directly to the right (Bradshaw et al. 1990; Carey et al. 1996; Mieschke et al. 2001; c.f., Keulen et al. 2007). When taken together, these findings suggest that reaching in different movement directions may influence the kinematic properties of virtual hand reaching movements.
2.2 The moderating influence of hand dominance and interaction hemispace
Past work has also shown that factors other than movement direction can influence the kinematic properties of virtual hand reaches. In the present work, we considered the influence of two of these factors: hand dominance and interaction hemispace.
Concerning the first factor, hand dominance, there is evidence that at least some kinematic properties of virtual hand reaching movements can be different when users reach using their dominant hand than when they perform the same reaches using their non-dominant hand (Arlati et al. 2021; Batmaz et al. 2020). For example, Batmaz and colleagues (2020; Study 1) had participants perform virtual hand reaches between targets in an evenly spaced array that was aligned with either the vertical or the horizonal plane. In this context, they found that reaches using the dominant hand took significantly less time to complete (i.e., smaller movement time) than reaches using the non-dominant hand. Similar effects of hand dominance on reaching kinematics have also been observed in other task contexts, including 3D reaches to physical targets (e.g., Johnstone 2015; Keulen et al. 2007; Xiao et al. 2019), 2D reaches where the hand can only move in the horizontal plane (e.g., Claudio & Teixeira 2012; Goh et al. 2022; van Doorn 2008), reach-to-grasp movements (e.g., Flindall et al. 2014; Stins et al. 2001), and reaches performed without visual feedback of the hand (e.g., Schaffer & Sainburg 2017; Tomlinson & Sainburg 2012).
Concerning the second factor, interaction hemispace, there is evidence that at least some kinematic properties of virtual hand reaches can be different when reaches occur on the same side of the body as the reaching arm, compared to when reaches occur on the opposite side of the body from the reaching arm (interaction hemispace; Arlati et al. 2021; Clark & Riggs 2020; Knaut et al. 2009; c.f. Lubos et al. 2014). For example, Knaut and colleagues (2009) had participants perform virtual hand reaches to targets at six different positions in the vertical plane. The targets were positioned in two rows and three columns, such that one column of targets was aligned with the user’s midline and the remaining two columns were positioned to the left and right of the midline, respectively. In this context, the results revealed a trend whereby users tended to reach slightly higher speeds (i.e., larger peak velocity) when they reached on the same side of their body as their reaching arm than when they reached on the opposite side of their body. Similar effects of interaction hemispace on reaching movements kinematics have also been observed for reaches performed in slightly different task contexts, including 3D reaches to physical targets (e.g., Carey et al. 1996; Carson et al. 1990; Xiao et al. 2019) and 2D reaches where the hand can only move in the horizontal plane (e.g., Berret et al. 2021; Waters & Wade 2021).
Notably, most of this past work has focused on exploring how changing the hand used to perform movements or the interaction hemispace where movements occur influences the kinematic properties of virtual hand reaches or similar reaching movements, when other factors are held constant. However, recent evidence suggests that these two factors can also combine to moderate the effects of movement direction on the kinematic properties of virtual hand reaches. Specifically, in a recent study from our laboratory (Clark et al. 2023), users performed virtual hand reaches in five cardinal directions (i.e., movement direction; up, down, left, right, away), on either the left or right side of their body (i.e., interaction hemispace), using either their dominant right hand or non-dominant left hand (i.e., hand dominance). We then examined how several kinematic properties of users’ reaches varied across these different reaching conditions. The results indicated that the influence of movement direction on several kinematic properties of users’ reaches was significantly different depending on whether reaches: (a) were performed using the dominant or non-dominant hand and (b) occurred on the left or right side of the user’s body. For example, users ended the primary phase of their movements significantly closer to the target (primary submovement endpoint distance; Chua & Elliott 1993; Elliott et al. 2010) when they reached inward (toward their body midline) than when they reached outward (away from their body midline). Notably, this difference was present when users performed reaches on the opposite side of their body from their reaching arm, but not when reaches occurred on the same side of the body as their reaching arm. In short, this work revealed that the relationship between movement direction and several kinematic properties of virtual hand reaches can be different depending on both the hand used to perform movements (hand dominance) and the side of the body where movements occur (interaction hemispace).
2.3 The present work
To our knowledge, only one study to date has examined how the effects of movement direction on the kinematic properties of virtual hand reaches can change for reaches performed on either side of the body using either hand (Clark et al. 2023). This study revealed that movement direction, hand dominance, and interaction hemispace can interact to influence the kinematic properties of virtual hand reaching movements. This work also provided an initial account of how the kinematic properties of virtual hand reaches change when users reach in five different directions (i.e., up, down, left, right, and away), and how this relationship between movement direction and each kinematic property emerged differently for reaches on either side of the body using either hand.
In the present work, we aimed to build upon the results of this first study by providing an even more detailed account of how reaching in different directions influences the kinematic properties of virtual hand reaches, when users reach on either side of their body using either hand. Specifically, we had users perform virtual hand reaching movements in 12 different directions, and they reached in each direction on the left and right sides of their body using their dominant and non-dominant hands. We then examined how several kinematic properties of users’ reaches changed across these different reaching conditions. To our knowledge, this enabled us to provide the most detailed account to-date of how these three factors—movement direction, hand dominance, and interaction hemispace—interact to influence the kinematic properties of virtual hand reaching movements. Specifically, we addressed the following research questions:
-
1.
How do the kinematic properties of virtual hand reaching movements change when people reach in these 12 different movement directions?
-
2.
Do these relationships between movement direction and the kinematic properties of users’ reaching movements emerge differently depending on the hemispace in which movements occur and/or the hand with which movements are performed? If so, how?
3 Methods
3.1 Participants and apparatus
The protocol for this study was approved by the Institutional Review Board for the Social and Behavioral Sciences at the University of Virginia (IRB-SBS # 4369). The participants were 20 healthy adults recruited from the undergraduate, graduate student, and employee population at the University of Virginia (8 female, mean age = 25.7, range = 19–44). These participants had not participated in any previous reaching studies in our laboratory (e.g., Clark et al. 2023) and were naïve to the research questions being examined in the present study All participants had normal or corrected-to-normal vision and reported having no ailments that impacted their arm mobility. All participants expressed a strong right-hand preference, with scores greater than 40 (M = 84.89, SD = 15.7) on the Edinburgh Handedness Inventory (Oldfield 1971). Eight participants reported having had some previous experience with the Meta Quest or another consumer VR headset, while the remaining participants reported having no previous experience with VR.
The experiment was performed in a 2.90m by 2.38m room, and participants sat in a comfortable stationary chair that was secured to the floor. The experimenter sat at a desk to the side of participants and monitored their performance. Interpupillary distance (IPD) was measured for each participant using a medical grade pupillometer (Essilor Instruments, Model X81705), and the VR headset was adjusted to match each participant’s IPD using the sizing recommendations provided by Meta. The VR headset was a Meta Quest 2 (1832 × 1920 pixels resolution per eye, framerate of 90 fps, nominal field of view of 89◦). Kinematic data captured during reaching movements by recording the position of the Quest 2 handheld controllers at a sampling rate of 90 Hz.
3.2 Experimental task
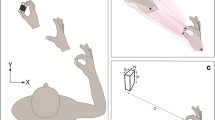
The experimental task was a VR-based point-to-point reaching task that was developed in Unity. In this task, participants used a virtual hand mapped to the movement of the handheld controllers to reach to targets at different locations in 3D space (Fig. 1). Participants began each trial in this task by moving their virtual hand until the tip of the index finger touched the yellow “start sphere.” Participants then pressed a specified button on the controller (“A” button for right hand movements, and “X” button for left) to select the start sphere while keeping their fingertip inside the start sphere. After a random interval (min = 0.5s, max = 1.5s), the start sphere disappeared and a red “target sphere” appeared somewhere in the environment. Participants then moved their virtual hand to select the target sphere. When the fingertip of the virtual hand touched the target sphere, the sphere’s color darkened to indicate that it could be selected. Participants then pressed the appropriate button on the controller to select the target sphere. Once a target sphere was selected it disappeared, and the start sphere reappeared to allow participants to begin the next trial. Participants were instructed to select each target sphere “as quickly and accurately as possible” and only to press the button to select a target once they were sure that they had reached the target. These instructions were designed to elicit behavior that reflects the constraints of typical virtual hand reaching movements, in which participants must accurately specify both the direction and extent of the movement. Participants were instructed to rest as needed between trials to minimize any effects of fatigue.

The set of movement conditions examined in the present study, including two movement directions examined in the previous study (In and Out, Clark et al., in press) and 10 additional movement directions that either involved moving inward or outward
3.3 Movement conditions
Targets could appear in a total of 12 different movement directions, which were derived by orthogonally combining four different azimuth angles with three different incline angles (Fig. 1). We focused on this range of movement directions because previous work has indicated that there can be relatively large kinematic differences between inward and outward reaches (Clark et al. 2023). All targets were positioned 0.20 units away from their associated start sphere. This arrangement produced a set of targets that were equidistant from their respective start spheres and evenly spaced out along an imaginary hemisphere that was centered on the start sphere, and that could be easily reached by all participants (Fig. 1).
Focusing on these 12 movement directions enabled us to examine a broad range of different movement directions while still benefiting from the flexibility of modeling movement direction as a factor (in this case, a 12-level factor). This was particularly important for this exploratory study, since treating movement direction as a factor allowed us to detect how the kinematic properties of reaches differed across the 12 movement directions without needing to make assumptions about the nature of these differences. Comparatively, potential alternative approaches such as modeling movement direction using semi-continuous linear effects of inclination and azimuth angles would have required us to make assumptions about how each kinematic metric varies as a function of movement direction (e.g., that each kinematic metric changes linearly as a function of inclination angle or azimuth angle).
However, the increased flexibility that came with modeling n movement directions as an n-level factor also came with some tradeoffs, in that this approach placed practical limits on the number of movement directions that could be examined in any one study. This is because fitting main effects and two- and three-way interactions for factors with many levels quickly consumes degrees of freedom in a model, and this can lead to convergence issues and overfitting if too many movement directions are examined. Given the size of our dataset in the present study, focusing on 12 movement directions enabled us to provide a much more fine-grained account of the relationship between movement direction and reaching kinematics while also avoiding the overfitting and model convergence issues that could result from examining an even larger number of movement directions.
3.4 Procedures
Participants were seated in a stationary chair throughout the study, and they were instructed to remain centered in the chair with their back against the back of the chair and to move using only their arms. An experimenter monitored participants throughout the study and corrected them if their body started to rotate or if their trunk began to move away from the back of the chair. To calibrate the virtual environment, participants sat centered up in the chair with their head level to the ground and pointed directly forward. The experimenter ensured that the participant’s head was properly positioned, and then reset the virtual environment so that it was centered on the participant’s current location. As a result, the middle of the VR environment aligned with the middle of the participant’s body.
Participants were introduced to the experimental task using a set of target locations that were not used during the experimental sessions. Participants then completed four experimental sessions. Within each session, the location of the start sphere (i.e., the interaction hemispace; “left side”, “right side”) and the hand used to perform the reaching movements (“left hand”, “right hand”) remained constant. The levels of these two factors were crossed orthogonally to produce the four experimental sessions: left hand/left side, left hand/right side, right hand/left side, and right hand/right side. Session order was counterbalanced across participants using a Latin square design. The movement direction in each trial was randomized, with the constraint that each potential movement direction occurred 10 times in each session. This resulted in a total of 480 trials per participant, and a 12 (direction) × 2 (hand; dominant right/non-dominant left) × 2 (side; left side, right side) repeated measures design.
3.5 Kinematic metrics
For each trial, we calculated a set of four different kinematic measures. We chose to focus on these metrics because a recent study from our laboratory (Clark et al 2023) found evidence that they can be particularly sensitive to changes in movement direction. The first measure, movement time (MT), indexes the amount of time it takes for a user to complete a movement. This provides a simple and intuitive measure of overall movement efficiency, based on the logic that more efficient movements will typically require less time to complete. We also examined peak velocity (\({v}_{peak}\)), which indexes the maximum speed that the hand achieves during a movement. This is an intuitive measure of movement speed, following the logic that faster movements will tend to achieve a greater maximum speed.
The third measure, primary submovement distance (\({d}_{PSE}\)), centers around identifying and quantifying a property of one particularly important landmark in users’ reaching movements: the primary submovement endpoint. This measure is inspired by the multiple process model of goal-directed reaching (Elliott et al. 2010, 2017), which posits that goal-directed reaching movements typically consist of two phases. First, in the impulse control phase, the user performs an initial high velocity submovement to bring the hand into the vicinity of the target. If the hand has not yet reached the target after this initial submovement, the user then performs one or more visually guided corrective submovements to close the remaining distance to the target (i.e., the current control phase). The primary submovement endpoint is the boundary between these two movement phases, and it can be identified for a given movement by using a specialized set of time and magnitude criteria to parse the velocity profile for that movement (Chua and Elliott 1993). The primary submovement distance (\({d}_{PSE}\)), is the distance remaining between the user’s hand and the target when the primary submovement endpoint occurs. This metric can be used to quantify several useful aspects of users’ movement adaptations, such as the strategies users adopt when planning and executing their initial submovements and the extent to which users relied on late corrective submovements to successfully reach a target (Lyons et al. 2006; Oliveira et al. 2005).
The final measure, spectral arc length (\(SPARC\)), provides an index of the overall quality of a user’s reaching movement (Balasubramanian et al. 2012, 2015; Mohamed Refai et al. 2021). This is based on the notion that optimally executed reaches will typically be performed in one smooth motion, while less optimal reaches tend to involve more intermittent movement that is punctuated by multiple instances of acceleration, deceleration, and pauses as the hand temporarily comes to a stop during the reach. Smooth movements tend to contain less high-frequency oscillatory activity in their velocity profiles (i.e., fewer transient increases and decreases in speed), while more intermittent movements tend to contain more of this high-frequency activity. When the velocity profile for a movement is transformed into the frequency domain, this increased high-frequency activity produces more complex patterns in the Fourier magnitude spectrum, which represents the amount of power present at each frequency in the kinematic profile. This is because smooth functions of time (in this case, the velocity profile for a smooth movement) also tend to be smooth functions of frequency (in this case, the Fourier magnitude spectrum for a smooth movement), while functions of time that are less smooth will tend to produce more complex frequency spectra that involve many undulations (Balasubramanian et al. 2012). \(SPARC\) quantifies the complexity of the Fourier magnitude spectrum, and therefore the smoothness of the associated movement, by calculating the arc length of this spectrum. Conceptually, this corresponds to the length of the line in the frequency-by-power plot, which becomes longer as the Fourier magnitude spectrum becomes more complex.
3.6 Statistical analysis
Data preprocessing was performed using MATLAB R2021a (Mathworks Inc., 2021). The experimental software captured the x-, y-, and z-position of the virtual fingertip at a nominal sampling rate of 90 Hz. Missing position data were interpolated using spline interpolation, and the data were resampled to a constant 90 Hz sampling rate. The position data were then filtered using a 2nd order Butterworth filter with settings appropriate for calculating each kinematic metric (i.e., half amplitude cutoff at 20 Hz for SPARC, and 8 Hz for all other metrics; Balasubramanian et al. 2012; Hansen et al. 2007). Filtered position data were then used to calculate the cumulative Euclidean distance travelled by the virtual fingertip at each time point during each session, and the resulting profiles were differentiated to derive the velocity and acceleration profiles that were used to calculate kinematic metrics (Hansen et al. 2007). Finally, each metric was calculated for each trial using the procedures mentioned in Sect. 3.5. There was evidence of target selection errors in 389 trials (4%), whereby participants either paused for a long time during the movement (i.e., movement time greater than 3 × IQR above the third quartile) or failed to select the target with their first reaching attempt (i.e., the button was pressed more than once during a trial). Movement data from these trials would not accurately reflect the kinematics of typical virtual hand reaching movements, so they were removed from the dataset and the remaining 9211 trials (96%) were submitted for further analysis.
To address our research questions in the present work, we used separate multilevel linear models (MLM; Laird & Ware 1982) to examine the effects of movement direction (12 levels; Fig. 1), hand (dominant right, non-dominant left), and side (left, right) on each of the four kinematic metrics. All models were fitted using the lme4 package (Bates et al. 2015) in R version 4.0.5 (R Core Team 2021), and parameter estimates were derived using full maximum likelihood estimation. The MLM for each dependent variable was constructed using the bottom-up procedure described by Hox et al. (2017), which involved beginning with a null model containing only random intercepts and adding fixed effects one at a time for direction, hand, side, and their associated two- and three-way interactions. Likelihood ratio tests on the model deviance were used to determine if adding each predictor led to a significant improvement in model fit. The p-values for these tests were adjusted using Holm’s step-down procedure (Holm 1979) to control the familywise error rate at 0.05, correcting for multiple comparisons. Significant effects were then further explored using post-hoc comparisons. P-values for these comparisons were corrected using the Tukey adjustment.
To ensure that the effects identified in the final model were not caused by a few unusual but highly influential observations, Cook’s distance was calculated for each observation and potential high-influence observations were further investigated. Where necessary, the final model was refitted without the high-influence observations to determine if this resulted in any substantive difference in the observed effects. In all cases, this resulted in no substantive changes to our results. Distributional assumptions for the final models were checked using normal Q–Q plots and plots of the residuals vs. predicted values, and any severe violations of these assumptions were noted. However, in the interest of interpretability, dependent variables were not transformed when violations of normality were detected. This decision was based on evidence from simulation studies indicating that parameter estimates from MLMs can be resilient to even significant violations of distributional assumptions (Schielzeth et al. 2020).
4 Results
Figure 2 below summarizes the results of the likelihood ratio tests examining the effects of direction, hand, and side on each of the four kinematic metrics. A dot plot representing the values of each metric in each condition with confidence intervals is provided in Appendix A. A spatial view of how each metric changed as a function of movement directions is provided in Appendix B. A table containing precise values of each metric in each condition is included in Appendix C. In the sections below, we summarize our findings for each metric in turn.

Summary of the Holm-corrected p-values from all likelihood ratio tests. The color in each cell indicates the extent to which each kinematic metric varied significantly as a function of each model factor (i.e., the independent variables and their interactions)
4.1 Movement time (\({\varvec{M}}{\varvec{T}}\))
The results indicated that \(MT\) changed significantly as a function of movement direction, and that these direction-dependent differences in \(MT\) emerged differently depending on both the hand used to perform movements and the side of the body on which movements occurred (Fig. 2). Post-hoc comparisons revealed that users tended to take less time to complete movements (smaller \(MT\)) when they reached directly inward than when they reached directly outward. This trend occurred for all four combinations of hand and side, but it fell short of statistical significance for one of the four conditions (i.e., Right Side/Left Hand). There were also significant differences in \(MT\) between reaches in the other movement directions, and these effects emerged differently for each combination of hand and side. These differences are summarized in Fig. 3.

A spatial view of how \(MT\) changed as a function of movement direction for each combination of hand and side. The movement directions of opposite colors (yellow vs. black) are significantly different from each other (Tukey-corrected p < .05). The rows depict groupings of movement directions such that the directions in yellow had significantly higher metric values than the directions in blue
From among our findings concerning \(MT\), two patterns were particularly notable. First, notice that when users reached in the hemispace contralateral to their reaching arm (i.e., Left Side/Right Hand or Right Side/Left Hand), they exhibited particularly large \(MT\) for reaches in the InDown direction and exhibited relatively small \(MT\) for reaches directly In (Fig. 4a). Given that the targets for reaches in these two movement directions were relatively close to each other, it is interesting that users took substantially longer to reach to one than to reach to the other. From kinematic results alone, it is not yet clear precisely why users took particularly long to select targets in the InDown direction, but not for reaches directly In. However, it is possible that reaches in the InDown direction may have required users to engage their shoulder to move their entire lower arm down and inward at an angle, while users may have completed reaches directly In by bending their elbow to rotate their hand inward toward the target.

Visual summary of notable results concerning how \(MT\) changed as a function of movement direction, for particular combinations of side and hand
Second, notice that when users reached in the hemispace contralateral to their reaching arm, they also exhibited particularly small \(MT\) when they reached in the OutAwayDown direction. Comparatively, when users reached in the other five directions that involved moving outward, they tended to exhibit much larger \(MT\) (Fig. 4b). Again, from hand kinematics alone, it is not yet clear precisely why this was the case. However, one possibility is that reaches in most outward directions may have required users to engage their shoulder to a greater extent to reach farther across their body. Comparatively, given users’ initial arm posture when performing reaches on the side of their body contralateral to the reaching arm, users may have been able to complete reaches in the OutAwayDown direction by simply extending their elbow, without needing to rely as heavily on engaging their shoulder. Again, co-registering hand kinematics with motion tracking of the users’ limb segments during virtual hand reaches could reveal if this type of strategy was responsible for the kinematic pattern we observed here.
4.2 Peak velocity (\({{\varvec{v}}}_{{\varvec{p}}{\varvec{e}}{\varvec{a}}{\varvec{k}}}\))
The results indicated that \({v}_{peak}\) changed significantly as a function of movement direction in this task, and that these direction-dependent differences in \({v}_{peak}\) emerged differently depending on both the hand used to perform movements and the side of the body on which movements occurred. Post-hoc comparisons confirmed the findings of Clark et al. (2023) with respect to \({v}_{peak}\). Namely, for all four combinations of hand and side, users moved significantly faster (larger \({v}_{peak}\)) when they reached directly In than when they reached directly Out (Fig. 5). There were also significant differences in \({v}_{peak}\) between reaches in the other inward and outward directions. As we observed for \(MT\), these effects emerged differently depending on both the hand used to perform movements and the side of the body on which movements occurred (Fig. 5).

A spatial view of how \({v}_{peak}\) changed as a function of movement direction for each combination of hand and side. The movement directions of opposite colors (yellow vs. black) are significantly different from each other (Tukey-corrected p < .05). The rows depict groupings of movement directions such that the directions in yellow had significantly higher metric values than the directions in blue
From our results concerning \({v}_{peak}\), several patterns were particularly notable. First, notice that when users reached on the left side of their body using their left hand, they exhibited smaller \({v}_{peak}\) when reaching in any of the four directions that involved moving upward (i.e., InUp, InAwayUp, OutUp, OutAwayUp) than when reaching in any of the four directions that involved moving downward (i.e., InDown, InAwayDown, OutDown, OutAwayDown; Fig. 6a). From hand kinematics alone, it is not yet clear precisely why users tended to achieve slower peak speeds when they reached upward on the left side using their left hand, compared to when they reached downward in this condition. However, the findings here suggest that, at least for reaches performed on the left side using the left hand, users may generally tend to move slower (smaller \({v}_{peak}\)) when they reach in a direction that requires them to move upward than when they reach in a direction that requires them to move downward. This may be because reaches downward were performed with the aid of gravity, while reaches upward required users to reach against gravity. This finding is consistent with past results from our laboratory, which have shown that reaches that involve moving directly upward can exhibit smaller \({v}_{peak}\) than reaches that involve moving directly downward. This pattern has been observed for center-out virtual hand reaches (Clark & Riggs 2020) and for virtual hand reaches performed on the left side of the body using the left hand (Clark et al. 2023). When users reached on the right side of their body using their right hand, \({v}_{peak}\) was again smallest for reaches in the Out direction and all four of the directions that involved moving upward (i.e., InUp, InAwayUp, OutUp, OutAwayUp; Fig. 6a). This suggests that, just like for reaches on the left side using the left hand, users tended to move slowest (i.e., smaller \({v}_{peak}\)) when they reached in directions that involved moving upward. This suggests that when users reached in the hemispace ipsilateral to their reaching arm (i.e., Left Side/Left Hand or Right Side/Right Hand), they generally tended to achieve slower speeds (smaller \({v}_{peak}\)) when they reached in directions that involved moving upward than when they reached in directions that involved moving downward.

Visual summary of notable results concerning how \({v}_{peak}\) changed as a function of movement direction, for particular combinations of side and hand
One notable pattern only emerged for reaches performed on the right side using the right hand. Namely, in this condition, users exhibited particularly large \({v}_{peak}\) when they reached in directions that involved moving both downward and inward (i.e., InDown and InAwayDown), such that \({v}_{peak}\) was significantly larger for reaches in these two directions than for reaches in the other two downward directions (i.e., OutDown and OutAwayDown; Fig. 6b). From hand kinematics alone, it is not clear precisely why users were able to achieve higher peak speeds (i.e., higher \({v}_{peak}\)) when reaching in these two directions on the right side using the right hand, but not on the left side using the left hand. However, these differences might be related to differences between the dominant and non-dominant limbs in terms of the motor control strategies for which they are specialized. Specifically, since the dominant limb is specialized for predictive control, it may have been able to incorporate gravitational torques into movements more effectively than the non-dominant arm (e.g., Sainburg 2002, 2014).
Finally, when users reached in the hemispace contralateral to their reaching arm (i.e., Right Side/Left Hand or Left Side/Right Hand), they exhibited uniquely large \({v}_{peak}\) when they reached directly In and the smallest \({v}_{peak}\) when they: (a) reached in the Out and OutAway directions and (b) reached in directions that involved moving both outward and upward (i.e., OutUp and OutAwayUp; Fig. 6c). Again, from hand kinematics alone, it is not clear precisely why this pattern emerged. However, it is possible that the particularly small \({v}_{peak}\) for reaches in these conditions may be related to the amount of shoulder engagement required to complete them. Specifically, given users’ likely initial arm posture when selecting targets in the hemispace contralateral to their reaching arm, users may have performed reaches directly In with minimal shoulder engagement by slightly lowering their elbow and bending their lower arm about their elbow to reach their hand inward. Comparatively, to reach in the directions for which we observed the smallest \({v}_{peak}\), users may have instead needed to rely more heavily on engaging their shoulder to reach their arm even farther across their body.
4.3 Primary submovement distance (\({{\varvec{d}}}_{{\varvec{P}}{\varvec{S}}{\varvec{E}}}\))
Results indicated that \({d}_{PSE}\) varied significantly as a function of movement direction, and these direction-dependent differences in \({d}_{PSE}\) emerged differently depending on both the hand used to perform movements and the side of the body on which movements occurred (Fig. 2). Post-hoc comparisons confirmed the findings of Clark et al. (2023) with respect to \({d}_{PSE}\). Namely, users ended their primary submovements significantly closer to the target (smaller \({d}_{PSE}\)) when they reached directly In than when they reached directly Out, but only when reaches occurred in the hemispace contralateral to the reaching arm (i.e., reaches on the left side using the right hand, or on the right side using the left hand). There were also significant differences between reaches in other directions that involved moving inward and outward. However, these significant differences only emerged for reaches that occurred in the hemispace contralateral to the reaching arm. For reaches in the hemispace ipsilateral to the reaching arm (i.e., Left Side/Left Hand and Right Side/Right Hand), there were no significant differences in \({d}_{PSE}\) across the 12 movement directions we examined (Fig. 7).

A spatial view of how \({d}_{PSE}\) changed as a function of movement direction for each combination of hand and side. The movement directions of opposite colors (yellow vs. black) are significantly different from each other (Tukey-corrected p < .05), The rows depict groupings of movement directions such that the directions in yellow had significantly higher metric values than the directions in blue
The results revealed several interesting patterns concerning how \({d}_{PSE}\) changed across the 12 movement directions we examined here. First, notice that \({d}_{PSE}\) only changed significantly as a function of movement direction when users performed virtual hand reaches in the hemispace contralateral to their reaching arm (i.e., reaches on the left side using the right hand, or on the right side using the left hand). Interestingly, this suggests that for virtual hand reaches performed in the hemispace ipsilateral to the reaching arm (i.e., Left Side/Left Hand or Right Side/Right Hand), \({d}_{PSE}\) did not vary significantly across reaches in the 12 movement directions we examined here. This does not mean that \({d}_{PSE}\) was statistically equal for reaches in all 12 movement directions, but only that any differences that were present weren’t large enough to achieve statistical significance.
Second, for reaches in both conditions that involved reaching in the hemispace contralateral to the reaching arm (i.e., Left Side/Right Hand and Right Side/Left Hand), we found that \({d}_{PSE}\) was particularly small for (1) reaches in the In and InAway directions and (2) reaches in inward directions that also involved moving downward (i.e., InDown and InAwayDown; Fig. 8a). This indicates that when users reached in the hemispace contralateral to their reaching arm, they tended to end their primary submovements particularly close to the target (small \({d}_{PSE}\)) when they reached in these four directions. It is not yet clear why this pattern emerged. However, the fact that it was observed when users reach in the contralateral hemispace using either their dominant or non-dominant limbs suggests that any direction-dependent differences in movement strategies or limb segment dynamics that may be responsible for this effect likely affect both the dominant and non-dominant limbs similarly.

Visual summary of notable results concerning how \({d}_{PSE}\) changed as a function of movement direction, for particular combinations of side and hand
Finally, when users reached in the hemispace contralateral to their reaching arm, there was one notable direction-dependent pattern in \({d}_{PSE}\) values that only emerged for reaches performed using the dominant right hand, but not for reaches using the non-dominant left hand. Specifically, when users reached on the left side using their right hand, they exhibited particularly small \({d}_{PSE}\) when reaching in the OutAwayUp direction (Fig. 8b). However, a similar pattern did not emerge for reaches performed on the right side using the left hand. This suggests that when users reached in the hemispace contralateral to their reaching arm, they ended their primary submovements particularly close to the target (small \({d}_{PSE}\)) when reaching in the OutAwayUp direction, but only for reaches performed using the dominant right hand. It is not yet clear precisely why reaches using the right hand on the left side exhibited this \({d}_{PSE}\) benefit for reaches in this direction, while analogous reaches performed using the left hand on the right side did not. However, this may reflect differences in the control policies for which the dominant and non-dominant limbs are optimized (Sainburg 2002, 2014), which could allow reaches using the dominant arm to gain an advantage that is not achievable for reaches using the non-dominant arm.
4.4 Spectral arc length (\({\varvec{S}}{\varvec{P}}{\varvec{A}}{\varvec{R}}{\varvec{C}}\))
The results indicated that \(SPARC\) varied significantly as a function of movement direction, and these direction-dependent differences in \(SPARC\) emerged differently as a function of both hand and side (Fig. 2). Post-hoc comparisons confirmed the findings of Clark et al. (2023) with respect to \(SPARC\). Namely, users exhibited significantly smaller \(SPARC\) values (indicating smoother movements) when reaching directly In than when reaching directly Out, and this difference reached significance for all combinations of hand and side. There were also significant differences in \(SPARC\) values between reaches in the other directions, and these effects emerged differently for the different combinations of hand and side (Fig. 9).

A spatial view of how \(SPARC\) changed as a function of movement direction for each combination of hand and side. The movement directions of opposite colors (yellow vs. black) are significantly different from each other (Tukey-corrected p < .05)
The results revealed one particularly interesting pattern concerning how \(SPARC\) changed as a function of movement direction for reaches on each side of the body using each hand. Namely, notice that when users reached in the hemispace contralateral to their reaching arm (i.e., Left Side/Right Hand or Right Side/Left Hand), \(SPARC\) was similarly small (indicating smoother movements) for reaches in all six of the directions that involved moving inward (i.e., In, InAway, InUp, InAwayUp, InDown, InAwayDown; Fig. 10a). Conversely, when users reached in the hemispace ipsilateral to their reaching arm (i.e., Left Side/Left Hand or Right Side/Right Hand), \(SPARC\) was smallest for reaches directly In but not for reaches in the other inward directions (Fig. 10b).

Visual summary of notable results concerning how \(SPARC\) changed as a function of movement direction, for particular combinations of side and hand
This suggests that when users reached on the opposite side of their body from their reaching arm, they tended to achieve similarly smooth movements (smaller \(SPARC\)) when they reached in any direction that involved moving inward (Fig. 10a). Conversely, when users reached on the same side of their body as their reaching arm, they only achieved their smoothest movements when they reached directly In (Fig. 10b). It is not clear precisely why this was the case, but it may have something to do with how users adapted their movement strategies to the different initial arm postures that they likely needed to assume when performing reaches in the contralateral and ipsilateral hemispaces. Considering the emerging body of evidence suggesting that \(SPARC\) can provide an informative and robust measure of overall movement quality, particularly for monitoring arm function recovery during motor rehabilitation (e.g., Kanzler et al. 2020; Schwarz et al. 2019), it would be valuable to understand precisely why these direction- and hemispace-dependent differences in \(SPARC\) emerge.
5 Discussion
5.1 Summary of findings
Overall, our results revealed that \(MT\), \({v}_{peak}\), \({d}_{PSE}\) and \(SPARC\) varied significantly across the 12 movement directions were examined in the present study. (RQ 1). Furthermore, for all four metrics, the influence of movement direction was significantly different depending on both the hand used to perform movements and the side of the body on which movements occurred (RQ 2). Concerning how each kinematic metric changed as a function of movement direction for reaches on each side of the body using each hand, our results yielded two principal findings.
First, our results confirmed the principal findings of Clark et al. (2023) with a new set of participants. Namely, users exhibited faster (larger \({v}_{peak}\)) and smoother (smaller \(SPARC\)) movements that ultimately took less time to reach the target (smaller \(MT\)) when they reached in the In direction (i.e., directly toward their body midline) than when they reached in the Out direction (i.e., directly away from their body midline). Users also ended their primary submovements significantly closer to the target (smaller \({d}_{PSE}\)) when they reached in the In direction than when they reached in the Out direction, but only for reaches that occurred in the hemispace contralateral to their reaching arm (i.e., reaches on their left side using their right hand, or on their right side using their left hand). This was consistent with the findings of previous work from our laboratory (Clark et al. 2023).
Second, and most critically, our results provided an even more detailed account of how these four kinematic metrics changed across the broad set of 12 different movement directions that we examined here. For reaches in these directions, we found that the influence of movement direction on reaching kinematics was: (a) drastically different for each of the four kinematic metrics (Figs. 3, 4, 5, 6, 7, 8, 9, 10) and (b) depended heavily on both the hand used to perform movements and the side of the body on which movements occurred. To our knowledge, these findings represent the most detailed account to-date of how movement direction influences the kinematic properties of virtual hand reaches, for reaches on either side of the body using either hand.
5.2 Comparisons to previous work
Much of the past work examining the effects of movement direction on reaching kinematics has focused on center-out reaching tasks, in which users begin with their hand near their body midline and reach away from themselves to select targets at different locations in 3D space (e.g., Knaut et al. 2009; Lubos et al. 2014). In these studies, users typically reached using only one hand (usually the dominant hand), and movements occurred near the body midline rather than entirely on one side of the body or the other. Comparing our results here to the findings of these past studies highlights how the effects of movement direction on reaching kinematics can be quite different when users reach near their body midline, compared to when users reach on either side of their body using either hand.
5.2.1 Away and downward vs. away and upward
First, some past work examining center-out reaches has found that there can be significant kinematic differences between reaches in directions that involve moving away from the body and downward, compared to reaches that involve moving away from the body and upward. Specifically, for center-out reaches performed in VR, there is evidence that users may exhibit larger \(MT\) (Lubos et al. 2014) and smaller \({v}_{peak}\) (Knaut et al. 2009) when they reach in directions that involve moving away and downward than when they reach in directions that involve moving away and upward. Conversely, for 3D reaches performed to physical targets, there is some evidence that users can exhibit shorter \(MT\) when they reach away and downward than when they reach away and upward (Cha & Myung 2013; Murata & Iwase 2001).
In the present study, we also examined reaches that involved moving away from the body and upward (i.e., InAwayUp and OutAwayUp), and reaches that involved moving away from the body and downward (i.e., InAwayDown, OutAwayDown). However, across all four combinations of hand and side, we did not observe any significant differences in \(MT\) between these two sets of reaching conditions. We did observe significant differences in \({v}_{peak}\), but these differences were in the opposite direction of the trend observed by Knaut et al. (2009). Specifically, when we observed differences in \({v}_{peak}\) between these two sets of movement directions, \({v}_{peak}\) generally tended to be larger for reaches away and downward than for reaches away and upward. These patterns also emerged differently for each combination of hand and side, such that \({v}_{peak}\) was not always significantly larger for reaches in every away and downward direction compared to every away and upward direction. The differences between the present results and past findings could be taken to suggest that the patterns of direction-dependent differences in \(MT\) and \({v}_{peak}\) that have been observed for center-out reaches might not generalize to reaches performed on the left and right sides of the user’s body, using the dominant and non-dominant arms. However, these discrepancies may also be related to differences between the present work and past studies concerning other task properties that may have influenced users’ movements, such as the height at which targets were positioned in the vertical plane.
5.2.2 Away and contralateral vs. away and ipsilateral
Past work has also found that when users perform center-out reaches using their right arm, they can exhibit smaller \(MT\) (Archambault et al. 1999; Berret et al. 2021; Carson et al. 1990; Gutierrez-Herrera et al. 2017; Kim et al. 2011; Stewart et al. 2013) and larger \({v}_{peak}\) (Archambault et al. 1999; Berret et al. 2021; Stewart et al. 2013; Waters & Wade 2021; Xiao et al. 2019) when they reach away from their body and to the right, compared to when they reach away from their body and to the left. Further evidence suggests that these patterns may reverse when users instead reach using the left arm, such that users can exhibit larger \({v}_{peak}\) (Waters and Wade 2021; Xiao et al. 2019) when they reach away and to the left than when they reach away and to the right. Together, this suggests that these patterns may actually reflect kinematic differences between reaches that involve moving away and ipsilateral to the side of the reaching arm (e.g., away and to the right using the right hand, or away and left using the left hand), compared to reaches that involve moving away and contralateral to the side of the reaching arm (i.e., away and to the left using the right hand, or away and right using the left hand). However, these findings all came from reaching tasks with constraints different from those involved in virtual hand reaching. This includes 3D reaches performed to physical targets (Archambault et al. 1999; Carson et al. 1990; Gutierrez-Herrera et al. 2017; Kim et al. 2011; Xiao et al. 2019), 2D reaches where the hand could only move in the horizontal plane (Berret et al. 2021; Waters and Wade 2021), and reaches performed without visual feedback of the hand (Stewart et al. 2013). Therefore, it is not clear if similar patterns may emerge for unconstrained 3D reaching movements performed in VR.
In the present study, we also examined reaches that involved moving away from the body and ipsilateral to the reaching arm, or away from the body and contralateral to the reaching arm (i.e., InAway or OutAway, depending on the combination of hand and side). For example, when users reached on the right side of their body using their right hand, reaches in the OutAway direction involved moving away and ipsilateral to the reaching arm, while reaches in the InAway direction involved moving away and contralateral to the reaching arm. Interestingly, for all combinations of hand and side, we did not observe any significant differences in \(MT\) between reaches in these two directions. However, we did observe differences in the predicted direction for \({v}_{peak}\), but only for reaches that occurred in the hemispace contralateral to the reaching arm (i.e., reaches on the right side using the left hand, or on the left side using the right hand). This suggests that users may exhibit this pattern of \({v}_{peak}\) benefits (i.e., larger \({v}_{peak}\)) for both center-out reaches and reaches that occur in the hemispace contralateral to the reaching arm, but not for reaches in the ipsilateral hemispace (i.e., reaches on the right side using the right hand, or on the left side using the left hand).
The differences between our findings here and past results suggest that users may adopt different movement strategies when they perform goal-directed reaching movements in the real world and VR. These strategies may emerge in part as a response to the different arm postures involved in reaching to select targets in VR. Specifically, most of the past work showing kinematic benefits for center-out reaches that involved moving away and ipsilateral to the reaching arm compared to reaches away and contralateral to the reaching arm studied reaches performed in the horizontal plane. For these reaches, the elbow was typically held at the same height as the wrist to allow users to move between targets position on a tabletop. Comparatively, when users reach to select targets in a VR environment, they often begin reaches with their wrist positioned higher than their elbow. It is therefore possible that when users perform reaching movements that begin with this initial posture, they may exhibit larger \({v}_{peak}\) when reaching away and ipsilateral to the reaching arm compared to reaches away and contralateral to the reaching arm without also exhibiting a corresponding reduction in \(MT\).
5.3 Practical implications
The findings of this work can support several emerging research and design efforts at the intersection of human movement science and virtual reality. First, for work focused on improving the usability of consumer VR interfaces, our findings provide novel insights into how users move while performing virtual hand reaching interactions in many different conditions. Quantitatively, these findings could help to improve predictive models of user behavior (e.g., Henrikson et al. 2020) by providing top-down information about how the kinematic properties of users’ movements change in different task contexts. This could supplement emerging bottom-up, data-driven approaches to addressing these types of problems. Qualitatively, our results can help designers to anticipate how people will move while interacting with interface elements in virtual space by providing a clearer understanding of how different kinematic properties of users’ movements change when they perform reaching movements with different constraints (i.e., in different directions, on the left or right side, and using the left or right hand).
Second, for laboratory work exploring human motor control processes (e.g., Elliott et al. 2010, 2017, 2020), the present results can be used to examine the extent to which patterns of reaching behavior observed in the real world also emerge for reaching movements performed in VR. Since VR shows considerable promise as a flexible experimental platform for studying 3D reaching movements performed across different task contexts, it will be important to understand if and how kinematic results obtained in VR may differ from those observed in real-world environments. To further aid these efforts, we plan to make the raw kinematic data from this and future studies available upon full completion of the project. Expanding upon the data obtained in our recent previous study, in which we focused on reaches performed in five movement directions (Clark et al. 2023), the data from this study can enable physical-to-VR comparisons for reaches that involve an even broader range of movement directions. Furthermore, in the present work, we examined goal-directed reaching movements performed in conditions that have not yet been examined in past work. Consequently, the present results provide new observations to be accounted for by existing motor control theories. In particular, future research involving the multiple process model of goal-directed reaching (Elliott et al. 2010) and the dynamic dominance hypothesis of motor lateralization (Sainburg 2002, 2014) should consider the extent to which these theories may be able to account for the novel effects of movement direction, hand and hemispace on reaching kinematics that we observed here.
Finally, there are several specific application areas where kinematic analyses show potential for answering questions about users’ movement behaviors in VR, including monitoring patients’ progress during VR-based motor rehabilitation (e.g., Park et al. 2021; Salisbury et al. 2020), monitoring learners’ progress during VR-based motor skills training (e.g., Abich et al. 2021; Radhakrishnan et al. 2021), and detecting usability issues during reaching interactions with VR displays (Clark & Riggs 2019; Kamińska et al. 2022). For work in these areas, our results provide a detailed quantitative account of how kinematic measures can be expected to change as a function of movement direction, hand, and hemispace that can be used to interpret the results of kinematic assessments more precisely.
Perhaps most promisingly, the present findings may be particularly helpful for improving VR-based rehabilitation programs, which have shown potential for helping stroke patients regain their arm function (Domínguez-Téllez et al. 2020; Farook et al. 2018; Feitosa et al. 2021; Gill and Dudonienė, 2019; Laver 2018; Lee et al. 2019; Mekbib et al. 2020; Montalbán and Arrogante 2020). In recent years, there has also been considerable movement toward using kinematic analyses of reaching movements and other activities to monitor arm function recovery in stroke patients (Murphy and Hager 2015; Schwarz et al. 2019), and several of the metrics we examined here, including \(SPARC\) and \({v}_{peak}\), have shown promise as useful measures of arm function for these patients (Kanzler et al. 2020; Mohamed Refai et al. 2021; Schwarz et al. 2019). Considering that consumer VR systems could soon be used to both deliver stroke rehabilitation programs (Park et al. 2021) and administer kinematic assessments to monitor patients’ progress (Kaminer et al. 2014), understanding how healthy people adapt the kinematic properties of their reaches to changes in movement direction, hand, and hemispace can provide a baseline for distinguishing between typical adaptive behaviors and stroke-related performance deficits (see e.g., (Hajihosseinali et al. 2022). For example, if a researcher notices that a patient is exhibiting smaller \(SPARC\) values when reaching directly In than when reaching directly Out during a VR-based reaching assessment, it would be useful to know if this difference also emerges in healthy participants, or if it rather reflects a stroke-related performance deficit that is not typically observed in healthy individuals. Our findings here can begin to provide this context.
5.4 Limitations
As with any experiment, this work had some limitations that are important to consider when interpreting and applying the results. Many of these limitations can be addressed by additional work aimed at further exploring and generalizing our findings in the present study. First, to simplify our analysis of the effects of hand dominance on users’ reaching behaviors, we limited our focus to users who were right-handed. Furthermore, we note that our findings here were based on data collected from a sample of 20 users. Promisingly however, our results here replicated the findings of our previous study, which used a similar sample size (Clark et al. 2023). This increases our confidence that, at the very least, the kinematic differences between reaches directly In and reaches directly Out are relatively consistent phenomena.
Furthermore, while the present work examined a very diverse set of movement conditions, including reaches performed in 12 different directions for each combination of hand and hemispace, we have certainly not examined all possible types of virtual hand reaching movements. As such, while the present work represents a meaningful step forward, it is not yet clear how our results may generalize to conditions in which the variables we held constant in the present work (e.g., target size and movement distance) assume different values.
We also note that in screening participants for the present study, participants were assessed as having “normal or corrected-to-normal vision” based on their own self-report. As a result, it is possible that some participants may have had vision slightly below 20/20. We believe that this risk was minimal in the present work, given that (1) our sample consisted of young university students and employees for whom having adequate vision is strictly necessary to perform their daily duties, and (2) in past work studying a similar population, users’ self-report of visual acuity corresponded strongly to their performance on a standardized eye chart test (Clark and Riggs 2020).
We also focused here on virtual hand interactions that were performed using a handheld Meta touch controller, which weighs approximately 160g. Consequently, our results here may or may not generalize to free hand reaches that are performed without this additional weight in the hands. Promisingly, recent work has found that in a similar reaching task, several kinematic properties of users’ movements did not differ significantly between reaches performed with and without handheld controllers (Arlati et al. 2021).
In addition, we focused here on examining how movement direction, hand dominance, and interaction hemispace influence the kinematic properties of unconstrained, discrete, point-to-point 3D reaching movements performed in VR (i.e., “virtual hand reaches”). Thus, our results here may or may not generalize to reaches in the physical world, or to reaches in tasks that involve vastly different physical and/or perceptual conditions. As such, movement science researchers should consider the extent to which our findings in the present work may generalize to other tasks that have also been used for research in this space. In a similar vein, future practitioners should also consider if the present results can reasonably be expected to generalize to movements performed in specific applied contexts, such as stroke assessment tasks that simulate activities of daily living (e.g., Murphy et al. 2013, 2011; Osu et al. 2011) or training tasks that simulate performing a particular motor skill (e.g.,Boud et al. 1999; Carlson et al. 2015; Murcia-Lopez and Steed 2018). When making these judgments, practitioners should consider that our findings in the present work should be most likely to generalize to other tasks in which the physical and perceptual constraints on users’ reaches are as similar as possible to those present during the present study. In other words, the more similar a given movement task is to the task that we examined here, the more likely it is that the present results will generalize to that other task. This is because the human motor system is highly adaptive, such that users can employ different movement strategies to maximize performance and minimize effort when they are faced with different environmental constraints (e.g., Elliott et al. 2010; Todorov and Jordan 2002). Consequently, as reaching tasks become more different from each other in terms of (1) how they define success (i.e., goals), (2) the information available to inform users’ movements, and/or (3) the underlying dynamic factors that constrain users’ movements while they perform the task (e.g., gravitational and interaction torques; Gaveau et al. 2016; Sainburg and Kalakanis 2000), it becomes less likely that users’ reaches in those task contexts will exhibit similar kinematic characteristics.
Finally, as in previous work (Clark et al. 2023), we focused here on examining how users adapt their reaching behaviors as a function of movement direction, hand, and hemispace when examined in the aggregate. This approach was useful for revealing trends that tend to emerge across multiple users, which was instrumental in achieving our research goals in the present work. However, due to modeling limitations, we were still not yet able to examine if and how these effects may have emerged differently for different individual users. This would be useful to know, since many emerging applications of kinematic analyses in VR (e.g., post-stroke assessment, motor skills assessment, and usability testing) can often involve analyzing the movement behaviors of single individuals.
6 Conclusion
In the present study, we examined how several kinematic properties of virtual hand reaches (\(MT\), \({v}_{peak,}\) \({d}_{PSE,}\) \(SPARC\)) changed when users reached in 12 different directions, and how the relationship between movement direction and each kinematic property was different depending on the hand used to perform movements and the side of the body where movements occurred. This enabled us to provide—to our knowledge—the most detailed account to-date of how the kinematic properties of virtual hand reaches change when users reach in different directions, on either side of their body, using either hand.
Our results indicated that the relationship between movement direction and reaching kinematics is (a) vastly different for different kinematic metrics, and (b) depends on both the hand used to perform movements and the side of the body on which movements occur. Consequently, researchers and practitioners should account for the influence of these three factors when interpreting kinematic results from virtual hand reaching movements. For example, a future stroke researcher might need to examine kinematic metrics for movements in different directions to determine if a patient has difficulty moving in some directions but not in others. As the use of VR-based kinematic metrics continues to become more prevalent in applications ranging from motor rehabilitation (Park et al. 2021; Salisbury et al. 2020) to motor skills training (Abich et al. 2021; Radhakrishnan et al. 2021) and usability assessment (Clark and Riggs 2019; Kamińska et al. 2022), it is our hope that the present results can help future researchers and practitioners to make these kinds of judgments more effectively.
These findings reveal several promising opportunities for future work. First, since the influence of hand dominance on reaching kinematics may be different for left handers than for right handers (Nelson et al. 2018), it would be valuable to examine if and how the findings we report here may differ for left-handed users compared to right-handed users. In addition, it would be useful to further explore if and how the factors we examined here may interact with other factors that influence reaching behaviors, such as target size and movement distance. Future work should also consider if and how the findings we report here may generalize to the emerging context of free hand reaching in VR. Finally, it would also be valuable to explore and quantify individual differences in reaching behaviors, to understand if and why different individual users may adopt different reaching strategies. Together with the present findings, the these future investigations would help to reveal an even more complete and unified picture of how changing different environmental factors influences users’ movement behavior during virtual hand reaching.
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Abich J, Parker J, Murphy JS, Eudy M (2021) A review of the evidence for training effectiveness with virtual reality technology. Virtual Real 25(4):919–933. https://doi.org/10.1007/s10055-020-00498-8
Archambault P, Pigeon P, Feldman AG, Levin MF (1999) Recruitment and sequencing of different degrees of freedom during pointing movements involving the trunk in healthy and hemiparetic subjects. Exp Brain Res 126(1):55–67. https://doi.org/10.1007/s002210050716
Arlati S, Keijsers N, Paolini G, Ferrigno G, Sacco M (2021) Kinematics of aimed movements in ecological immersive virtual reality: a comparative study with real world. Virtual Real 26(3):1–17. https://doi.org/10.1007/s10055-021-00603-5
Balasubramanian S, Melendez-Calderon A, Burdet E (2012) A robust and sensitive metric for quantifying movement smoothness. IEEE Trans Biomed Eng 59(8):2126–2136. https://doi.org/10.1109/TBME.2011.2179545
Balasubramanian S, Melendez-Calderon A, Roby-Brami A, Burdet E (2015) On the analysis of movement smoothness. J Neuroeng Rehabil 12(1):112. https://doi.org/10.1186/s12984-015-0090-9
Bates D, Mächler M, Bolker B, Walker S (2015) Fitting linear mixed-effects models using lme4. J Stat Softw 67(1):1–48
Batmaz AU, Donaji M, Machuca B, Pham DM, Stuerzlinger W (2019) Do head-mounted display stereo deficiencies affect 3D pointing tasks in AR and VR ? In: IEEE conference on virtual reality and 3D user interfaces
Batmaz AU, Sun X, Taskiran D, Stuerzlinger W (2020) Eye-hand coordination training for sports with mid-air VR. In: 26th ACM symposium on virtual reality software and technology, pp 1–10. https://doi.org/10.1145/3385956.3418971
Bennett SJ, Elliott D, Rodacki A (2012) Movement strategies in vertical aiming of older adults. Exp Brain Res 216:445–455. https://doi.org/10.1007/s00221-011-2947-x
Berret B, Conessa A, Schweighofer N, Burdet E (2021) Stochastic optimal feedforward-feedback control determines timing and variability of arm movements with or without vision. PLoS Comput Biol 17(6):e1009047. https://doi.org/10.1371/journal.pcbi.1009047
Boud AC, Haniff DJ, Baber C, Steiner SJ (1999) Virtual reality and augmented reality as a training tool for assembly tasks. In: 1999 IEEE international conference on information visualization (Cat. No. PR00210), pp 32–36. https://doi.org/10.1109/IV.1999.781532
Bradshaw JL, Bradshaw JA, Nettleton NC (1990) Abduction, adduction and hand differences in simple and serial movements. Neuropsychologia 28(9):917–931. https://doi.org/10.1016/0028-3932(90)90108-Z
Burkitt JJ, Bongers RM, Elliott D, Hansen S, Lyons JL (2017) Extending energy optimization in goal-directed aiming from movement kinematics to joint angles. J Mot Behav 49(2):129–140. https://doi.org/10.1080/00222895.2016.1161592
Carey DP, Hargreaves EL, Goodale MA (1996) Reaching to ipsilateral or contralateral targets: within-hemisphere visuomotor processing cannot explain hemispatial differences in motor control. Exp Brain Res. https://doi.org/10.1007/BF00227955
Carlson P, Peters A, Gilbert SB, Vance JM, Luse A (2015) Virtual training: learning transfer of assembly tasks. IEEE Trans vis Comput Graph 21(6):770–782. https://doi.org/10.1109/TVCG.2015.2393871
Carson RG, Chua R, Etttorrt D, Goodman’ D (1990) The contribution of vision to asymmetries in manual aiming. Neuropsychologia 28(11):1215–1220
Cha Y, Myung R (2013) Extended Fitts’ law for 3D pointing tasks using 3D target arrangements. Int J Ind Ergon 43(4):350–355. https://doi.org/10.1016/j.ergon.2013.05.005
Chua R, Elliott D (1993) Visual regulation of manual aiming [PhD Thesis]. McMaster University
Clark LD, Riggs SL (2019) Investigating the use of movement kinematics to assess perceptual ambiguity in virtual reality. Proc Human Fact Ergon Soc Ann Meet 63(1):2318–2322. https://doi.org/10.1177/1071181319631156
Clark LD, Riggs SL (2020) Movement strategies in virtual reality: the influence of effort costs and target depth. Proc Human Fact Ergon Soc Ann Meet 64(1):1600–1604. https://doi.org/10.1177/1071181320641385
Clark LD, Bhagat A, Riggs SL (2020) Extending Fitts’ law in three-dimensional virtual environments with current low-cost virtual reality technology. Int J Hum Comput Stud 139(February):102413. https://doi.org/10.1016/j.ijhcs.2020.102413
Clark LD, Iskandarani ME, Riggs SL (2023) The effect of movement direction, hand dominance, and hemispace on reaching movement kinematics in virtual reality. In: Proceedings of the 2023 CHI conference on human factors in computing systems
Claudio APK, Teixeira LA (2012) A Developmental perspective of intermanual performance asymmetry in aiming. Percept Mot Skills 115(1):153–165. https://doi.org/10.2466/10.25.PMS.115.4.153-165
Domínguez-Téllez P, Moral-Muñoz JA, Salazar A, Casado-Fernández E, Lucena-Antón D (2020) Game-based virtual reality interventions to improve upper limb motor function and quality of life after stroke: systematic review and meta-analysis. Games Health J 9(1):1–10
Elliott D, Hansen S, Grierson LEM, Lyons J, Bennett SJ, Hayes SJ (2010) Goal-directed aiming: two components but multiple processes. Psychol Bull 136(6):1023–1044. https://doi.org/10.1037/a0020958
Elliott D, Lyons J, Hayes SJ, Burkitt JJ, Roberts JW, Grierson LEM, Hansen S, Bennett SJ (2017) The multiple process model of goal-directed reaching revisited. Neurosci Biobehav Rev 72:95–110. https://doi.org/10.1016/j.neubiorev.2016.11.016
Elliott D, Lyons J, Hayes SJ, Burkitt JJ, Hansen S, Grierson LEM, Foster NC, Roberts JW, Bennett SJ (2020) The multiple process model of goal-directed aiming/reaching: insights on limb control from various special populations. Exp Brain Res. https://doi.org/10.1007/s00221-020-05952-2
Farook SA, Singh K, Govind S, Wah YC, Kesavan R, Chinnavan E (2018) Impact of virtual reality training in rehabilitation of stroke patients: a cross sectional review. J Neurosci 8(1):16–20
Feitosa JA, Fernandes CA, Casseb RF, Castellano G (2021) Effects of virtual reality-based motor rehabilitation: a systematic review of fMRI studies. J Neural Eng Press. https://doi.org/10.1088/1741-2552/ac456e
Flindall JW, Doan JB, Gonzalez CLR (2014) Manual asymmetries in the kinematics of a reach-to-grasp action. Later Asymmetries Body Brain Cogn 19(4):489–507
Gaveau J, Berret B, Angelaki DE, Papaxanthis C (2016) Direction-dependent arm kinematics reveal optimal integration of gravity cues. Elife 5:e16394. https://doi.org/10.7554/eLife.16394
Gill G, Dudonienė V (2019) Virtual reality therapy for upper extremity functions following stroke: a systematic review. Reabilitacijos Mokslai Slauga Kineziterapija Ergoterapija https://doi.org/10.33607/rmske.v2i21.826
Goh H-T, Stewart JC, Becker K, Hung C-J (2022) Perceived effort for reaching is associated with self-reported fatigue. J Mot Behav 54(1):14–26. https://doi.org/10.1080/00222895.2021.1871877
Grossman T, Balakrishnan R (2004) Pointing at trivariate targets in 3D environments. In: Proceedings of the 2004 conference on human factors in computing systems - CHI ’04, 6(1): 447–454. https://doi.org/10.1145/985692.985749
Gutierrez-Herrera M, Saevarsson S, Huber T, Hermsdörfer J, Stadler W (2017) Repetitive TMS in right sensorimotor areas affects the selection and completion of contralateral movements. Cortex 90:46–57. https://doi.org/10.1016/j.cortex.2017.02.009
Hajihosseinali M, Behzadipour S, Taghizadeh G, Farahmand F (2022) Direction-dependency of the kinematic indices in upper extremities motor assessment of stroke patients. Med Eng Phys 108:103880. https://doi.org/10.1016/j.medengphy.2022.103880
Hansen S, Elliott D, Khan MA (2007) Comparing derived and acquired acceleration profiles: 3-D optical electronic data analyses. Behav Res Methods 39(4):748–754. https://doi.org/10.3758/BF03192965
Henrikson R, Grossman T, Trowbridge S, Wigdor D, Benko H (2020) Head-coupled kinematic template matching: a prediction model for ray pointing in VR. In: Proceedings of the 2020 CHI conference on human factors in computing systems, pp 1–14. https://doi.org/10.1145/3313831.3376489
Holm S (1979) A simple sequentially rejective multiple test procedure. Scand J Stat 6(2):65–70
Hox J, Moerbeek M, Van de Schoot R (2017) Multilevel analysis: techniques and applications. Routledge
Mathworks Inc. (2021). MATLAB (Version 2021a) [Computer software]
Johnstone L (2015) Hemispheric asymmetries: Behavioural, kinematic, and electrophysiological predictors of cerebral organization. Bangor University
Kaminer C, LeBras K, McCall J, Phan T, Naud P, Teodorescu M, Kurniawan S (2014) An immersive physical therapy game for stroke survivors. In: Proceedings of the 16th international ACM SIGACCESS conference on computers & accessibility - ASSETS ’14: 299–300. https://doi.org/10.1145/2661334.2661340
Kamińska D, Zwoliński G, Laska-Leśniewicz A (2022) Usability testing of virtual reality applications—the pilot study. Sensors 22(4):1342. https://doi.org/10.3390/s22041342
Kanzler CM, Rinderknecht MD, Schwarz A, Lamers I, Gagnon C, Held JPO, Feys P, Luft AR, Gassert R, Lambercy O (2020) A data-driven framework for selecting and validating digital health metrics: use-case in neurological sensorimotor impairments. Npj Digital Med 3(1):80. https://doi.org/10.1038/s41746-020-0286-7
Keulen RF, Adam JJ, Fischer MH, Kuipers H, Jolles J (2007) Distractor interference in selective reaching: effects of hemispace, movement direction, and type of movement. Cortex 43(4):531–541. https://doi.org/10.1016/S0010-9452(08)70247-8
Kim W, Buchanan J, Gabbard C (2011) Constraints on arm selection processes when reaching: degrees of freedom and joint amplitudes interact to influence limb selection. J Mot Behav 43(5):403–411. https://doi.org/10.1080/00222895.2011.619222
Knaut LA, Subramanian SK, McFadyen BJ, Bourbonnais D, Levin MF (2009) Kinematics of pointing movements made in a virtual versus a physical 3-Dimensional environment in healthy and stroke subjects. Arch Phys Med Rehabil 90(5):793–802. https://doi.org/10.1016/j.apmr.2008.10.030
Laird NM, Ware JH (1982) Random-effects models for longitudinal data. Biometrics 38(4):963–974
Laver K (2018) Virtual reality for stroke rehabilitation (review). Cochrane Database Syst Rev 164
Lee HS, Park YJ, Park SW (2019) The effects of virtual reality training on function in chronic stroke patients: a systematic review and meta-analysis. Biomed Res Int 2019:1–12. https://doi.org/10.1155/2019/7595639
Lubos P, Bruder G, Steinicke F (2014) Analysis of direct selection in head-mounted display environments. In: 2014 IEEE symposium on 3D user interfaces, pp 11–18
Lyons J, Hansen S, Hurding S, Elliott D (2006) Optimizing rapid aiming behaviour: movement kinematics depend on the cost of corrective modifications. Exp Brain Res 174(1):95–100. https://doi.org/10.1007/s00221-006-0426-6
Machuca MDB, Stuerzlinger W (2019) The effect of stereo display deficiencies on virtual hand pointing. In: Proceedings of CHI conference on human factors in computing systems proceedings (CHI2019), 14. https://doi.org/10.1145/3290605.3300437
Mekbib DB, Han J, Zhang L, Fang S, Jiang H, Zhu J, Roe AW, Xu D (2020) Virtual reality therapy for upper limb rehabilitation in patients with stroke: a meta-analysis of randomized clinical trials. Brain Inj 34(4):456–465. https://doi.org/10.1080/02699052.2020.1725126
Mieschke PE, Elliott D, Helsen WF, Carson RG, Coull JA (2001) Manual asymmetries in the preparation and control of goal-directed movements. Brain Cogn 45(1):129–140. https://doi.org/10.1006/brcg.2000.1262
Mine MR (1995) Virtual environment interaction techniques (TR95-018; pp 1–18). University of North Carolina
Mira RM, Molinari Tosatti L, Sacco M, Scano A (2021) Detailed characterization of physiological EMG activations and directional tuning of upper-limb and trunk muscles in point-to-point reaching movements. Curr Res Physiol 4:60–72. https://doi.org/10.1016/j.crphys.2021.02.005
Mohamed Refai MI, Saes M, Scheltinga BL, van Kordelaar J, Bussmann JBJ, Veltink PH, Buurke JH, Meskers CGM, van Wegen EEH, Kwakkel G, van Beijnum B-JF (2021) Smoothness metrics for reaching performance after stroke part 1: which one to choose? J NeuroEng Rehabil 18(1):154. https://doi.org/10.1186/s12984-021-00949-6
Montalbán MA, Arrogante O (2020) Rehabilitation through virtual reality therapy after a stroke: a literature review. Revista Científica De La Sociedad De Enfermería Neurológica (english Ed) 52:19–27
Murata A, Iwase H (2001) Extending fitts’ law to a three-dimensional pointing task. Hum Mov Sci 20(6):791–805. https://doi.org/10.1016/S0167-9457(01)00058-6
Murcia-Lopez M, Steed A (2018) A comparison of virtual and physical training transfer of bimanual assembly tasks. IEEE Trans Visual Comput Graph 24(4):1574–1583. https://doi.org/10.1109/TVCG.2018.2793638
Murphy MA, Hager CK (2015) Kinematic analysis of the upper extremity after stroke – how far have we reached and what have we grasped? Phys Ther Rev 20(3):137–155
Murphy MA, Willén C, Sunnerhagen KS (2011) Kinematic variables quantifying upper-extremity performance after stroke during reaching and drinking from a glass. Neurorehabil Neural Repair 25(1):71–80. https://doi.org/10.1177/1545968310370748
Murphy M, Willén C, Sunnerhagen KS (2013) Responsiveness of upper extremity kinematic measures and clinical improvement during the first three months after stroke. Neurorehabil Neural Repair 27(9):844–853. https://doi.org/10.1177/1545968313491008
Nelson EL, Berthier NE, Konidaris GD (2018) Handedness and reach-to-place kinematics in adults: left-handers are not reversed right-handers. J Mot Behav 50(4):381–391. https://doi.org/10.1080/00222895.2017.1363698
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia 9(1):97–113
Oliveira FTP, Elliott D, Goodman D (2005) Energy-minimization bias: compensating for intrinsic influence of energy-minimization mechanisms. Mot Control 9:101–114
Osu R, Ota K, Fujiwara T, Otaka Y, Kawato M, Liu M (2011) Quantifying the quality of hand movement in stroke patients through three-dimensional curvature. J Neuroeng Rehabil 8(1):62. https://doi.org/10.1186/1743-0003-8-62
Papaxanthis C, Pozzo T, Stapley P (1998) Effects of movement direction upon kinematic characteristics of vertical arm pointing movements in man. Neurosci Lett 253(2):103–106. https://doi.org/10.1016/S0304-3940(98)00604-1
Park S, Lee D, Hong S, Cho K, Lee G (2021) Feasibility of training using full immersion virtual reality video game in young stroke survivor: a case report. NeuroRehabilitation 48(1):1–8. https://doi.org/10.3233/NRE-201501
Poupyrev Iv, Ichikawa T (1999) Manipulating objects in virtual worlds: categorization and empirical evaluation of interaction techniques. J vis Lang Comput 10(1):19–35. https://doi.org/10.1006/jvlc.1998.0112
R Core Team. (2021). R (4.0.5) [Computer software]
Radhakrishnan U, Koumaditis K, Chinello F (2021) A systematic review of immersive virtual reality for industrial skills training. Behav Inf Technol 40(12):1310–1339. https://doi.org/10.1080/0144929X.2021.1954693
Roberts JW (2020) Energy minimization within target-directed aiming: the mediating influence of the number of movements and target size. Exp Brain Res 238(3):741–749. https://doi.org/10.1007/s00221-020-05750-w
Sainburg R (2002) Evidence for a dynamic-dominance hypothesis of handedness. Exp Brain Res 142(2):241–258. https://doi.org/10.1007/s00221-001-0913-8
Sainburg RL (2014) Convergent models of handedness and brain lateralization. Front Psychol 5:1092. https://doi.org/10.3389/fpsyg.2014.01092
Sainburg RL, Kalakanis D (2000) Differences in control of limb dynamics during dominant and nondominant arm reaching. J Neurophysiol 83(5):2661–2675. https://doi.org/10.1152/jn.2000.83.5.2661
Salisbury JP, Aronson TM, Simon TJ (2020) At-home self-administration of an immersive virtual reality therapeutic game for post-stroke upper limb rehabilitation. In: Extended abstracts of the 2020 annual symposium on computer-human interaction in play, pp 114–121. https://doi.org/10.1145/3383668.3419935
Schaffer JE, Sainburg RL (2017) Interlimb differences in coordination of unsupported reaching movements. Neuroscience 350:54–64. https://doi.org/10.1016/j.neuroscience.2017.03.025
Schielzeth H, Dingemanse NJ, Nakagawa S, Westneat DF, Allegue H, Teplitsky C, Réale D, Dochtermann NA, Garamszegi LZ, Araya-Ajoy YG (2020) Robustness of linear mixed-effects models to violations of distributional assumptions. Methods Ecol Evol 11(9):1141–1152. https://doi.org/10.1111/2041-210X.13434
Schwarz A, Kanzler CM, Lambercy O, Luft AR, Veerbeek JM (2019) Systematic review on kinematic assessments of upper limb movements after stroke. Stroke 50(3):718–727
Shemmell J, Hasan Z, Gottlieb GL, Corcos DM (2007) The effect of movement direction on joint torque covariation. Exp Brain Res 176(1):150–158. https://doi.org/10.1007/s00221-006-0605-5
Stewart JC, Gordon J, Winstein CJ (2013) Planning and adjustments for the control of reach extent in a virtual environment. J Neuroeng Rehabil 10(1):27. https://doi.org/10.1186/1743-0003-10-27
Stins JF, Kadar EE, Costall A (2001) A kinematic analysis of hand selection in a reaching task. Laterality Asymmetries Body Brain Cogn 6(4):347–367. https://doi.org/10.1080/713754421
Thompson SG, McConnell DS, Slocum JS, Bohan M (2007) Kinematic analysis of multiple constraints on a pointing task. Hum Mov Sci 26(1):11–26. https://doi.org/10.1016/j.humov.2006.09.001
Todorov E, Jordan MI (2002) Optimal feedback control as a theory of motor coordination. Nat Neurosci 5(11):1226–1235. https://doi.org/10.1038/nn963
Tomlinson T, Sainburg R (2012) Dynamic dominance persists during unsupported reaching. J Mot Behav 44(1):13–25. https://doi.org/10.1080/00222895.2011.636398
van Doorn RRA (2008) Manual asymmetries in the temporal and spatial control of aimed movements. Hum Mov Sci 27(4):551–576. https://doi.org/10.1016/j.humov.2007.11.006
Vandenberghe A, Bosmans L, De Schutter J, Swinnen S, Jonkers I (2012) Quantifying individual muscle contribution to three-dimensional reaching tasks. Gait Posture 35(4):579–584. https://doi.org/10.1016/j.gaitpost.2011.11.028
Waters E, Wade E (2021) Classification of task-specific confidence from kinematic features. In: 2021 10th international IEEE/EMBS conference on neural engineering (NER), 757–762. https://doi.org/10.1109/NER49283.2021.9441448
Woodworth RS (1899) The accuracy of voluntary movement. Psychol Rev Monogr Suppl 3(3)
Xiao X, Hu H, Li L, Li L (2019) Comparison of dominant hand to non-dominant hand in conduction of reaching task from 3D kinematic data: trade-off between successful rate and movement efficiency. Math Biosci Eng 16(3):1611–1624. https://doi.org/10.3934/mbe.2019077
Acknowledgements
Logan Clark was supported by a Meta Research PhD Fellowship. The authors would also like to thank Peiyu Zhang and Jeffrey Richbart for the development of the simulator used in this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
There were no conflicting interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Post-hoc test results for each metric
Movement time
See Fig.

Mean \(MT\) values for reaches in each direction, for each combination of hand and side. Error bars reflect ± 1 SE. The horizontal lines indicate significant differences (Tukey adjusted p < .05). Part (A) summarizes significant differences between inward and outward directions, and part (B) summarizes significant differences among reaches in the different inward directions and among reaches in the different outward directions
11.
Peak velocity
See Fig.

Mean \({v}_{peak}\) values for reaches in each direction, for each combination of hand and side. Error bars reflect ± 1 SE. The horizontal lines indicate significant differences between inward and outward reaches (Tukey adjusted p < .05). Part A summarizes significant differences between inward and outward directions, and part B summarizes significant differences among reaches in the different inward directions and among reaches in the different outward directions
12.
PSE distance
See Fig.

Mean \({d}_{PSE}\) values for reaches in each direction, for each combination of hand and side. Error bars reflect ± 1 SE. The horizontal lines indicate significant differences between inward and outward reaches (Tukey adjusted p < .05). Part A summarizes significant differences between inward and outward directions, and part B summarizes significant differences among reaches in the different inward directions and among reaches in the different outward directions. \({d}_{PSE}\) is quantified using Unity units. The total distance from the starting position to the target was 0.20 units, so a \({d}_{PSE}\) of 0.08 indicated that users ended their primary submovements with 40% of the total movement distance left to travel. The difference between a \({d}_{PSE}\) of 0.05 and 0.08 corresponds to a difference of 15% of the total movement distance
13.
4.1 SPARC
See Fig.

Mean \(SPARC\) values for reaches in each direction, for each combination of hand and side. Error bars reflect ± 1 SE. The horizontal lines indicate significant differences between inward and outward reaches (Tukey adjusted p < .05). Part A summarizes significant differences between inward and outward directions, and part B summarizes significant differences among reaches in the different inward directions and among reaches in the different outward directions
14.
Appendix B: Spatial view of the mean values for each metric
Movement time
See Fig.

A spatial view of how MT changed as a function of movement direction for each combination of hand and side. The colors in each panel represent the mean MT value for each of the 12 movement directions, with lighter colors indicating larger MT and darker colors indicating smaller MT
15.
Peak velocity
See Fig.

A spatial view of how \({v}_{peak}\) changed as a function of movement direction for each combination of hand and side. The colors in each panel represent the mean \({v}_{peak}\) value for each of the 12 movement directions, with lighter colors indicating larger \({v}_{peak}\) and darker colors indicating smaller \({v}_{peak}\)
16.
PSE distance
See Fig.

A spatial view of how \({d}_{PSE}\) changed as a function of movement direction for each combination of hand and side. The colors in each panel represent the mean \({d}_{PSE}\) value for each of the 12 movement directions, with lighter colors indicating larger \({d}_{PSE}\) and darker colors indicating smaller \({d}_{PSE}\)
17.
8.1 SPARC
See Fig.

A spatial view of how \(SPARC\) changed as a function of movement direction for each combination of hand and side. The colors each panel represent the mean \(SPARC\) value for each of the 12 movement directions, with lighter colors indicating larger \(SPARC\) and darker colors indicating smaller \(SPARC\)
18.
Appendix C: Mean values by experimental condition
See Table 1.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Clark, L., Iskandarani, M.E. & Riggs, S. Reaching interactions in virtual reality: the effect of movement direction, hand dominance, and hemispace on the kinematic properties of inward and outward reaches. Virtual Reality 28, 43 (2024). https://doi.org/10.1007/s10055-023-00930-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10055-023-00930-9