
Abstract
Wind turbines are a driving force in the change towards renewable energies today. Offshore wind turbines have reached power ratings around 15 MW, and the growth continues. Grid emulators have become inevitable for the test and validation of wind turbines and subsystems at full scale. Yet, large investments for new installations present major challenges.
Therefore, the following discussion outlines basic design aspects for the grid emulator main components: converter, transformer, and filter. The aim is to clarify the implications of requirements on the design to exhaust ratings for minimum investments, and to satisfy testing against the most recent standards and grid codes. Appropriate ratings are derived based on steady-state and transient test needs. It is shown how much overrating is specifically needed and why the converter is usually rated a multiple compared to the device under test. Further dimensioning criteria such as power quality, switching frequency, and filter size are discussed in this context.
Finally, the capacity of grid emulators is often characterized by the short-circuit power. Two essentially different variants of short-circuit power are introduced, either being dependent on the converter peak current or the passive components impedance. While the first one reveals the overload capability, the latter represents a proper measure for grid strength. However, the emulated grid strength can be adjusted in a limited bandwidth using impedance control. The concept might be confusing at first glance, but it effectively decouples the virtual short-circuit power from the ratings of the power hardware.
Zusammenfassung
Windenergieanlagen sind ein treibender Faktor im Wandel hin zu erneuerbaren Energien. Offshore-Windturbinen haben heute Nennleistungen um 15 MW erreicht und die Leistungen steigen weiter. Zum Testen und Validieren von Windenergieanlagen und deren Komponenten bei Bemessungsleistung sind Netzemulatoren unverzichtbar geworden. Jedoch stellen die für Neuanlagen notwendigen hohen Investitionen eine Herausforderung dar.
Der folgende Artikel behandelt einige grundlegende Aspekte zur Auslegung der Hauptkomponenten eines Netzemulators: Umrichter, Transformator und Filter. Es wird der Einfluss wesentlicher Anforderungen auf die Auslegung der Komponenten aufgezeigt, um diese passend dimensionieren zu können. Damit können die Anschaffungskosten minimiert und Tests entsprechend der geltenden Normen und Netzanschlussbedingungen durchgeführt werden. Basierend auf stationären und transienten Testanforderungen werden geeignete Kriterien zur Auslegung abgeleitet. Es wird gezeigt, wie viel Überlast tatsächlich nötig ist und warum der Umrichter meist ein Vielfaches der Leistung des Prüflings aufweist. In diesem Zusammenhang werden auch Kriterien wie Spannungsqualität, Schaltfrequenz und Filterleistung untersucht.
Die Leistungsfähigkeit von Netzemulatoren wird häufig anhand deren Kurzschlussleistung charakterisiert. Hier werden zwei grundsätzlich unterschiedliche Varianten der Kurzschlussleistung eingeführt, die zum einen vom Maximalstrom des Umrichters und zum anderen von der Impedanz der passiven Komponenten abgeleitet werden. Während erstere die Überlastfähigkeit aufzeigt, stellt letztere ein geeignetes Maß für die Spannungssteifigkeit des emulierten Netzes dar. Die emulierte Spannungssteifigkeit kann auch durch eine Regelung der Impedanz in begrenzter Bandbreite gezielt variiert werden. Das Konzept mag auf den ersten Blick verwirrend erscheinen, aber es entkoppelt effektiv die virtuelle Kurzschlussleistung des Netzemulators von den tatsächlichen Bemessungsdaten seiner Komponenten.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Grid Emulators (GEM) are electrical test systems based on power electronic converters usually installed at dedicated test facilities. There are multiple synonyms. They are also called grid simulator, eGrid, Controllable Grid Interface (CGI) or Power Electronics Grid Simulator (PEGS). They might be based on different internal technologies, but they all serve the same basic function. At their output terminals, they provide a controllable, high-quality voltage which emulates a real grid in various healthy and faulty conditions:
-
Under- and overfrequency
-
Under- and overvoltage, balanced and unbalanced
-
Transient voltage faults, balanced and unbalanced
-
Grid short-circuit power and impedance, weak and stiff
-
Grid inertia, high, low, and islanding
GEMs can serve the industry at various stages in the product development process of renewable power generation units, such as prototype, function, reliability, and endurance testing. They enable the electrical testing and validation in a controlled environment under repeatable conditions. Thereby they reduce the time to market significantly and finally increase the overall reliability needed for large scale renewable power generation and integration.
Research institutes extend the field of application for GEMs even more. The hardware is used as a power amplifier driven by a real-time computer system for Power Hardware in the Loop (PHiL) experiments. This way, the output terminals can emulate arbitrary electrical systems within a limited bandwidth. Such integration makes an electrical system emulator with which grid connected equipment can be analyzed amongst others for:
-
Source impedance characteristics
-
Interactions with distributed energy resources
-
Stability in smart, mini, micro and island grids
1.1 Purpose and outline
This article provides insights into the requirements, capabilities, features, and design of GEMs. It is addressed to GEM system planners, owners and operators, research institutes, certifiers and working groups who link them.
The scope is on multi-megawatt test rigs, especially for high power wind turbines, although many concepts are universal for a broader range of applications.
Section 2 gives an overview on the general setup and existing systems. Potential converter types and general design aspects are introduced.
Section 3 analyzes selected requirements in more detail and derives general findings on the power ratings and dimensioning of the main components.
Section 4 presents meaningful definitions of important system parameters such as short-circuit power and ratio. Finally, the concept of natural and virtual impedance is introduced.
1.2 State of the art grid emulators
In the context of wind turbine nacelle testing, GEMs are subsystems within larger test rigs. The nacelle is put between a prime mover and the GEM, both connected to the utility grid. The prime mover feeds mechanical energy to the nacelle, which in turn feeds electrical energy back to the GEM.
However, GEMs can also be standalone test systems. There are projects focused on mobile GEMs, such as Mobil-Grid-CoP by Fraunhofer IWES [1] or MERGE by Aalborg University and R&D Test Systems [2], that can be used directly in the field on a fully functional turbine.
Multi-megawatt wind turbine nacelle test rigs with GEMs are relatively recent technologies, mostly installed from 2010 on. The overall completion time can be two years and more from planning to final commissioning.
Table 1 gives an overview about existing and future GEM systems that are integrated into nacelle test facilities [1, 3,4,5,6,7,8,9,10,11,12,13,14,15,16]. The list focusses on multi-megawatt test rigs, yet it is not exhaustive. Wind turbine manufacturers have installed similar systems. Moreover, low power renewable energy equipment is not considered.
The technical indicators presented in Table 1 are electrical system power rating, maximum converter power and the drivetrain mechanical power capability. Electrical ratings are higher than mechanical ratings because GEMs must handle both, active and reactive power generated by the turbine. The high converter power is more remarkable. It is factor two to three compared to the electrical system rating. Those fundamental relationships are subsequently discussed.
2 System setup of grid emulators
A grid emulator is directly connected in the line between the utility grid and the device under test (DUT) which, in this scope, is the line-side of a wind turbine nacelle. Figure 1 shows the integration.

General grid emulator system setup interfacing DUT line-side components
The GEM main components can be separated into line-side and DUT-side components. The DUT is connected at the point of common coupling (PCC) which electrical characteristics and capabilities are agreed upon between GEM operator and DUT owner. The transformer adapts the nominal voltage of the utility grid and the DUT to the GEM converter voltage. Passive filters ensure appropriate power quality. The GEM converters predominantly consist of conventional voltage source converters which decouple voltages and frequencies from line-side to DUT-side.
2.1 Power electronic converter types
A Voltage Source Converter (VSC) is the core component of a GEM. It provides the variable voltage and frequency. And it essentially determines the system capabilities through its voltage and current limitations and its control performance. Furthermore, it causes the major efforts and costs.
Low-Voltage (LV) converter systems are broadly used in wind turbines, even up to the highest power ratings beyond 10 MW with high integration efforts. However, they are usually dedicated to applications in a lower power range.
High-Voltage (HV) converters are used for rail interties, static var compensators, and high voltage direct current applications, for example. They are usually open rack designs due to the required insulation characteristics. Such converters occupy dedicated converter halls that require an increased footprint and cause higher costs and efforts for installation and integration into facilities.
Modular Multilevel Converters (MMC) have already been analyzed regarding GEMs for fault ride-through testing [17] and unbalanced scenarios [18]. While MMCs have not yet been installed for ac grid emulation so far, they are used in PHiL experiments to study MVDC systems [19].
GEMs typically use Medium-Voltage (MV) industrial converters [1, 7, 8]. They provide sufficient power ratings and offer cabinet-based designs that allow for high power densities. The overview on test facilities in Table 1 shows that up to date, most of the existing systems consist of Medium-Voltage Three-Level Voltage Source Converters (MV 3L VSC). Nonetheless, Cascaded H-Bridge Converters (CHBC) were also applied for a few systems.
2.2 Line-side design aspects
During normal operation, energy circulates from the utility grid into DUT towards GEM and back into the grid. Because a GEM feeds energy back into the grid, its line-side operates as a generator. But when integrated into a test rig, it must not follow the grid code rules for generators, because the test rig as a whole is by all means a consumer towards the utility grid. Therefore, the line-side components can be dimensioned according to non-demanding design inputs, which are also applicable to other kinds of consumers:
-
Nearly constant voltage (nominal ±10%) and frequency (nominal ±3%)
-
Unity power factor operation. Reactive power supply to grid is not required.
-
Harmonic emissions are regulated by standards on power quality e.g.
The standards are tolerant to low order harmonic levels to some extent which allows for low converter switching frequency and fully utilized current capability. Moreover, a quasi-constant voltage enables a high power rating of the harmonic filter and just ordinary basic insulation levels. Inductive components can be designed for a minimum of magnetic core material. Shortly, the line-side design is straight forward. Standard equipment is made particularly for those conditions.
2.3 DUT-side design aspects
The DUT (wind turbine, solar panel, etc.) is a generator that must proof compliance by certification tests prior to market introduction. Grid codes define the functionalities and capabilities towards energy resources being connected to the grid. There are numerous grid codes worldwide. A general reference for the European market is ENTSO‑E RfG [23]. National and international standards, such as IEC 61400-21‑1 [24], FGW-TG3 [25], IEEE 1547.1 [26], and UL 1741 [27] provide test and assessment methods for grid connected energy resources. They drive various electrical requirements for GEMs, e.g. steady-state and temporary voltage and frequency ranges, reactive power capability, control dynamics, and power quality.
The GEM must generate the entire spectrum of test scenarios and withstand the corresponding DUT responses. Grid code, function and reliability tests are carried out on GEMs early in the development cycle. And manufacturers naturally want to exhaust these tests a little beyond their official limits. In the end, the wide variety of requirements can be condensed roughly to a few electrical design inputs:
-
Large voltage range (0–1.5 p.u.) and frequency range (45–65 Hz)
-
Large power factor range (0–1)
-
High PCC voltage slew rate (≥ 1 p.u. / 3 ms) and control bandwidth (≥ 500 Hz)
-
High power quality requirements (THDu ≤ 2%)
This shows that the electrical design requirements of the DUT-side are essentially more demanding. And the indicated values are for industrial test purposes only. At research facilities, the requirements are likely higher.
3 Dimensioning of grid emulators
GEMs should be properly dimensioned to satisfy the test scope and to reduce costs at the same time. Therefore, selected test requirements are briefly analyzed in the following sections for their effect on the general ratings of the main components: converter, transformer, and filter.
3.1 Continuous power range
Transmission System Operators (TSO) require generators to contribute amongst others to grid voltage control. Therefore, a generator must provide a predefined range of reactive power when operating at its rated active power Pn.
Figure 2a shows the reactive power requirements over grid voltage (UQ-chart) given by the European Network of TSOs for Electricity (ENTSO-E) in [23]. It claims to serve as a general outer envelope for TSOs. With it, the requirements of the German technical connection rules VDE-AR‑N 4110 [28] are also marked. A basic range of support (grey solid line) applies to full active power production. To ensure the maximum range of support (black dashed line), an active power reduction of 10% is accepted.

PCC reactive power requirements and GEM converter operating range. a Reactive power requirements, b Converter voltages and currents
The nominal operating point at Pn is labeled n. The operating points along the envelope are transferred from the PCC to the GEM converter using a transformer impedance of 18% at 50 Hz. The resulting converter voltages and currents are depicted in Fig. 2b. The extremums allow for the following basic conclusions:
-
The voltage in D requires a nominal voltage Un with ≈ 18% minimum margin towards the maximum converter voltage: 1.18 ∙ Un ≤ UConv,max
-
The current in A requires a nominal current In with ≈ 35% minimum margin towards the maximum continuous converter current: 1.35 ∙ In ≤ IConv,max
Conventional converter designs usually provide 15% voltage margin in the linear modulation range. About 10% should be utilized for economic reasons, although unbalanced operation at maximum voltage may be compromised. Therefore, basic power ratings are estimated as follows:
-
Converter continuous power SConv ≈ 1.35 ∙ 1.18 / 1.10 ∙ Pn ≈ 1.45 ∙ Pn
-
Transformer continuous power STrafo ≈ 1.35 ∙ Pn
3.2 Short-term overcurrent
A grid voltage disturbance usually triggers a transient response of the resource that tries to restore normal operation without disconnecting from the grid. This so-called fault ride-through (FRT) event potentially causes system overcurrents.
Riding through short voltage dips with low retained voltages is particularly challenging for generators. A zero-voltage ride-through (ZVRT) emulates a short circuit at the PCC and it can be considered worst case in this context. In terms of overcurrent response on voltage dips and swells, energy resources can be classified into two categories:
-
Type 1: Energy is fully or partially fed to the grid through electrical machines.
(e.g. type 3 wind turbines [24], synchronous generators)
FRT overcurrents can be in the range of 5–8 p.u.
-
Type 2: Energy is fully fed to the grid through power electronic converters.
(e.g. type 4 wind turbines [24], solar plants)
FRT overcurrents are likely limited to 1.1 p.u.
A GEM must withstand the DUT overcurrent levels and provide sufficient capability to enable successful FRT testing.
Type 1 DUTs must be considered individually because the overcurrent requirement is ultralarge. A suitable converter overcurrent rating should be based on the characteristics of the DUT’s controlled response to voltage faults and is not in the scope of this analysis.
Type 2 DUTs usually do not inject overcurrents when properly controlled. However, the GEM should still tolerate ≈ 1.1 times the maximum continuous current requirement [25] for situations where fault responses are not well tuned. With respect to the full operating range introduced in Sect. 3.1, the short-term power can be estimated:
-
Converter short-term power SConv,1s ≈ 1.45 ∙ 1.1 ∙ Pn ≈ 1.6 ∙ Pn
Note that the suggested SConv,1s applies to DUTs within the presented category Type 2. It is not sufficient for wind turbines using Doubly-Fed Induction Generators (DFIG) since they belong to category Type 1.
3.3 Short-term over- and undervoltages
TSOs specify PCC voltage ranges of at least 0.9–1.1 p.u. as normal condition for continuous operation. But generators must also remain operational for reactive current support under abnormal grid conditions like time-limited over- and undervoltages or phase jumps. Figure 3 shows profiles for overvoltage and undervoltage levels (FRT-profiles) against the time after fault initiation. The curves specify the boundary for generators between mandatory grid support operation and the permission to trip and disconnect. The shaded areas indicate the suggested limitations by ENTSO‑E [23] for Type 1 (red area) and Type 2 (green area) generators. And the solid lines are specific requirements given by VDE-AR‑N 4110 [28].

Fault ride-through voltage profiles against time during and after a fault
The FRT-profiles are generated by the GEM converters. Their output voltage margin must therefore allow for the overvoltage at the PCC including the transformer voltage drop at reactive power injection. Moreover, despite the shown requirements, a no-load PCC voltage range of 0–1.5 p.u. is usually requested today to prepare for future requirements.
The insulation of transformer, switchgear, cables and potentially a harmonic filter must be coordinated for this accordingly. A nominal voltage of 33 kV (66 kV) calls for a standard insulation class of 52 kV (99 kV) which increases size and costs.
The entire voltage range cannot be covered economically by the converter with a single transformer ratio only, because a large converter voltage margin would require a costly converter overrating. To better utilize the converter power capabilities, the transformer should be equipped with dedicated tappings for overvoltage testing. Their corresponding operating ranges must be well balanced based on the converter voltage and current limitations, because either manual or automatic no load tap changing interrupts ongoing tests.
3.4 Voltage control dynamics
Voltage levels change immediately for most grid faults. But on GEMs, voltage rise and fall times depend upon the transfer behavior of converter, transformer, and filter. Therefore, appropriate hardware design and high dynamic voltage control are needed for realistic FRT testing.
IEC 61400-21‑1 [24] defines tolerance bands for positive sequence voltage responses on step references. The impact of the GEM voltage slew rate was analyzed in [29]. Figure 4 shows a balanced voltage dip and its positive sequence being calculated according to standard with one fundamental period moving window.

Balanced voltage dip against IEC 61400-21‑1 tolerance band
At 50 Hz, the standard filter algorithm takes 20 ms to settle the positive sequence on an immediate voltage step. Therefore, a high converter control bandwidth and an actual voltage slew rate of at least 1 p.u. / 3 ms are required to retain the positive sequence in its tolerance band. The power rating of a passive filter must be sufficiently small not to unacceptably degrade the voltage slew rate and the control dynamics.
Finally, dynamic voltage changes generally cause exceedingly high magnetic fluxes in inductive components. And to mitigate saturation, the transformer’s magnetic core must be designed appropriately, which leads to bigger and more costly magnetic cores compared to conventional transformer designs.
3.5 Power quality
The GEM grid voltage must be of high quality. To achieve no load voltage THDs of less than 2% usually a passive harmonic filter is installed.
A filter at the converter output has a line reactor which imposes extra impedance. It impacts the reactive power capability according to Sect. 3.1, whereas the low voltage level enables less expensive components on a minimum footprint. A shunt-filter at the PCC avoids the additional impedance. But being on medium or high voltage level, its components imply higher costs and footprint. Consequently, a filter at a dedicated transformer winding poses an interesting alternative. Yet, it also requires a special transformer design regarding impedances.
The line reactors and shunt capacitor banks generate a second order low pass behavior that attenuates harmonics efficiently only at frequencies beyond the introduced resonance.
A high filter power leads to a low resonance frequency along with a wide-band attenuation of converter harmonic emissions and thereby to a better filter performance. But high filter powers also compromise control dynamics in terms of fast voltage changes. And filtering must also not interfere with harmonic injection, where 1 kHz and more may be required. Therefore, a high resonance frequency is needed which is achieved only by a low filter power.
Those contradictory design goals call for a compromise between power quality and control dynamics. For that reason, the filter power is usually minimized to increase the introduced resonance frequency.
However, such a filter design relies on converter harmonic emissions being present only at high orders beyond the resonance frequency and the required selective injections. If conventional 3L MV VSCs are used, the significant modulation harmonics are shifted into a higher frequency range by increasing the effective switching frequency at the output. Two concepts are usually adopted for this. Firstly, multiple converter units are connected in series or parallel, in a way that pulse interleaving can be applied. Secondly, the switching frequency of the individual converter units is increased beyond their original value as presented in Sect. 3.6.
3.6 Increased converter switching frequency
MV multi-level converters are usually designed to utilize the semiconductor devices to the maximum extent, while still providing sufficient control bandwidth for a wide variety of applications. Thus, the typical switching frequency is rather low being in the range from 450 Hz [30] to 900 Hz [31]. However, converters can be operated at higher switching frequencies. This increases the control bandwidth and reduces the harmonic filtering effort at the same time.
The following analysis exemplary demonstrates the current derating of a MV 3L VSC for increased switching frequency. A transient model using Neutral Point Clamped (NPC) topology as shown in Fig. 5 has been implemented in PLECS simulation software. High-voltage IGBT modules with a voltage rating of 4.5 kV and a current rating of 1500 A are used. The simulation parameters and assumptions are given in Table 2.

3L-NPC topology
Note, that the indicated switching frequency refers to the inverter output and not to individual devices. The thermal resistances apply for each IGBT/diode pair as well as for NPC diodes D5 and D6. Values for the device conduction losses, switching losses, thermal limits and transient thermal impedances can be found in the device datasheet [32]. The maximum semiconductor junction temperature of Tj,max = 120 °C is chosen well below the absolute limit of 150 °C, while the rated switching frequency of 900 Hz can be considered comparatively high [31].
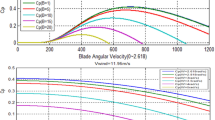
The analysis result in Fig. 6 shows a significant output current derating for switching frequencies up to 1400 Hz. Generally, if the switching frequency is increased, the permissible maximum output current must be reduced to satisfy the thermal limitations. In practice, all other associated components such as gate drivers, capacitors, and possible RC snubber circuits must support the increased switching frequency as well.

3L-NPC converter current derating over switching frequency
The analysis demonstrates that an increment by 500 Hz derates the output current by ≈ 30% and with it the available output power of the converter. Considering the results of Sects. 3.1 and 3.2 the following rating is required:
-
Converter continuous power rating SConv ≈ 1.45 ∙ Pn / 0.7 ≈ 2.1 ∙ Pn
-
Converter short-term power rating SConv,1s ≈ 1.6 ∙ Pn / 0.7 ≈ 2.3 ∙ Pn
4 Short-circuit power of grid emulators
TSOs specify the short-circuit power Sk at points of connection within their grids. It affects the protection features, and the grid control of energy resources being integrated at those points. Because GEMs should enable similar DUT behavior compared to real grids, consequently the question arises: How much short-circuit power can a GEM provide?
4.1 Context and terminology
Many standards, e.g. [20, 24] and [33] consistently define the short-circuit power Sk and the ratio SCR based on the nominal system voltage Un, the (initial symmetrical) short-circuit current Ik, and the DUT nominal power Sn as follows:
During a short circuit of traditional Type 1 resources, Ik is almost only limited by the internal short-circuit impedance Zk of the resource. However, for Type 2 resources, Ik is limited to the converter maximum current, without major influence of the impedance.
Large traditional grid (Type 1 only):
Mixed traditional and renewable (Type 1 and Type 2):
In traditional grids, both Ik and Zk are inherent in Sk, which has therefore been used successfully in two essentially different contexts at the same time: protection and grid strength. A potential Ik influences the dimensioning and the protection coordination on the one hand. On the other, SCR is a meaningful measure of grid strength in terms of voltage stiffness, because it implicitly contains Zk, which precisely relates voltage variations to current injections.
Yet, the grid strength of a system with converter-based resources differs from conventional generation system strength [34]. If the standard definition (1) is used for GEMs, Sk is unrelated to Zk and the resulting SCR is meaningless for grid strength.
For GEMs and any mixed resources grids in general, the definition of Sk and SCR could consequently be separated into two variants, being derived by either Ik or Zk:
Short-circuit current equivalent power
Short-circuit impedance equivalent power
Short-circuit current ratio
Short-circuit impedance ratio
4.2 Short-circuit current equivalent power and ratio
GEMs can only provide currents up to their converter (short-term) maximum current IConv,1s for both, normal operation, and fault condition. Therefore, IConv,1s can be considered the short-circuit current capability Ik of the GEM. Hence, the short-circuit current equivalent power Sk,I is identical to the converter peak power SConv,1s. And the corresponding short-circuit ratio SCRI directly numbers the overcurrent capability.
In the literature, often Sk,I is exclusively presented, referred to as peak short-circuit power in [3] or short-circuit capacity in [4], for example. However, the GEM overcurrent capability is less important for operation, as long as the DUT overcurrents can be handled. SCRI does not reveal information on the strength, i.e. the voltage stiffness of the emulated grid.
4.3 Short-circuit impedance equivalent power and ratio
The GEM internal impedance ZGEM depends on the individual impedances of all components between the voltage source converter and the PCC. Although the impedances of the converter (very low, in series) and the passive filter (very high, in parallel) might be neglected. ZGEM is most likely predominated by the line reactors and transformers. And for the sake of simplicity, it is expressed by the power rating STrafo and the impedance voltage uk of the transformer only.
A similar definition to Sk,Z in Eq. (11) has been introduced in IEC 61400-21‑1 [24] as the valid short-circuit power of the fictitious grid for the evaluation of flicker. And although differently defined, the upcoming IEC 61400-21‑4 [35] states that the short-circuit power of GEMs can be determined by measuring the PCC voltage variation in response to power variations, which finally results in Sk,Z.
Moreover, because SCR is an important established index for grid strength, not only to TSOs but also to equipment manufacturers, the impedance-based variants of Sk and SCR given in equations Eqs. (11) and (12) are adequate equivalents to the corresponding parameters of a real grid in this context.
4.4 Natural impedance
If the GEM runs in open loop voltage control, the converter operates at a fixed voltage and frequency. Then, the PCC voltage is determined by the voltage drop across the internal impedance ZGEM. It is called natural impedance because it represents the physical impedance between the converter and the PCC, in this case, the transformer short-circuit impedance uk. While the natural Sk in Eq. (11) depends on the GEM components only, the natural SCR in Eq. (12) applies to a specific combination of GEM and DUT.
The natural SCR for different ratios of rated powers for GEM and DUT is presented in Fig. 7. It reveals the basic dependency on the transformer. The natural SCR is not influenced by the converter.

Natural short-circuit ratio for varying transformer ratings
Following up on the guidelines in Sect. 3.1, a GEM with a transformer rating of STrafo ≈ 1.35 ∙ Pn and uk = 18% provides a stiff grid with a natural SCR = 7.5. Note, that this can be considered a general lower bound on full scale test rigs, since the presumed transformer power is a minimum and the impedance rather a maximum.
4.5 Virtual impedance
GEMs can control their voltage UPCC in dependency of the injected current IPCC such that the effective impedance Zk as experienced by the DUT can be altered. The control concept is shown in Fig. 8a. Both UPCC and IPCC are control feedbacks to follow the setpoints for internal source voltage U0 and virtual impedance Zk. The effectiveness of virtual impedance control is verified by measurements and presented in [36].

Virtual impedance control at the PCC [36]. a Control schematic, b Equivalent circuit
The parameters U0 and Zk of the emulated grid in Fig. 8b can be adjusted. Therefore, both the corresponding virtual Sk and SCR can be adjusted as well, in a limited bandwidth around the fundamental frequency, and within the system voltage and current limitations though.
This may lead to misunderstandings, since the virtual Sk and SCR have no correlation to the power ratings of the converter and transformer anymore.
5 Conclusion
Grid emulators are inevitable test systems for the development of multi-megawatt wind turbines. Their concept and design should be smart since major investments are needed for new installations. The lowest ratings that satisfy the test scope lead to economic solutions with respect to size and costs. Yet, finding appropriate ratings is not a trivial task. Specifically testing for grid code compliance poses demanding requirements towards a grid emulator, with a determining influence on the ratings of converter, transformer, and filter.
Existing test rigs prove that the converter maximum power rating can reach up to three times the mechanical power rating. However, the presented analysis shows that ≈ 145% rated and ≈ 160% peak converter power can already fulfill the most demanding requirements, such as reactive power supply on undervoltage, margin for overvoltage, and overcurrent on fault ride-through events. Although, the current derating at increased switching frequency, if required, may call for additional 30–40% on rated and peak power.
Regarding resources with grid connected electrical machines, an economic converter rating is harder to find since an excessive overcurrent capability is needed.
The transformer should be rated ≈ 135% of the DUT nominal active power to cover full power on undervoltage. And to support the high output voltage range, it must be equipped with specific tappings and an appropriate insulation class. The magnetic core is usually reinforced to prevent saturation effects.
A low power passive filter is likely required for power quality. While it must attenuate the effective switching frequency, it must not compromise dynamic voltage slew rates or interfere with harmonic injection.
GEMs are usually stiff grids by nature. Their grid strength is indicated by short-circuit power and ratio that both depend on the internal natural impedance, not on the converter peak current. But using closed loop control, the voltage can also be adapted to the load current, such that the impedance appears adjustable. Thereby, virtual impedance can, in a limited bandwidth, emulate varying grid strength.
References
Fraunhofer-IWES Research project aimed at boosting the grid compatibility of offshore wind turbines launched, Bremerhaven, Germany. https://www.iwes.fraunhofer.de/en/press/archive-2020/research-project-aimed-at-boosting-the-grid-compatibility-of-off.html. Accessed 8 June 2022
Aalborg University and R&D Test Systems Megawatt scalable versatile grid emulation system, EUDP funded project, Aalborg, Danmark. https://vbn.aau.dk/en/projects/megawatt-scalable-versatile-grid-emulation-system. Accessed 18 Oct 2022
Mehler C, Jersch T, Koralewicz P, Tegtmeier B (2016) Advanced grid simulator topology for testing of renewable energy supply units especially wind energy converters (WECs) under laboratory conditions. In: Proc. of EPE Conf., Karlsruhe, Germany
Nouri B, Göksu Ö, Gevorgian V, Sørensens P (2020) Generic characterization of electrical test benches for AC- and HVDC-connected wind power plants. Wind Energy Sci 5(2):561–575
Averous N, Stienecker M, Kock S, Andrei C, Helmedag A, De Doncker RW (2017) Development of a 4 MW full-size wind-turbine test bench. IEEE Trans Emerg Sel Top Power Electron 5(2):600–609
Jassmann U (2018) Hardware-in-the-loop wind turbine system test benches and their usage for controller validation. Ph.D. thesis, RWTH Aachen, Aachen
Rasmussen LS (2015) LORC nacelle testing. In: 3rd Int. Workshop on Grid Simulator Testing of Wind Turbine Drivetrains, Tallahassee
Offshore Renewable Energy Catapult (2020) Going live with grid emulation. https://ore.catapult.org.uk/stories/going-live-with-grid-emulation. Accessed 6 Sept 2022
Offshore Renewable Energy Catapult (2022) 15 MW wind turbine nacelle test facility, specification sheet, Blyth
Li Y, Wang Y, Wang R, Wu J, Zhang H, Feng Y, Li S, Yao W, Li B (2016) Distributed generation grid-connected converter testing device based on cascaded H‑bridge topology. IEEE Trans Ind Electron 63(4):2143–2154
Schkoda R, Fox C (2014) Integration of mechanical and electrical hardware for testing full scale wind turbine nacelles. In: Proc. Clemson Univ. Power Syst. Conf., Clemson, SC, USA
ABB Inc. (2011) ACS 6000 multidrive provides speed control for wind turbine test benches, case note. ABB, New Berlin
Jersch T (2013) LVRT testing on DyNaLab—Electrical certification of windturbines on test benches? In: 1st Int. Workshop on Grid Simulator Testing of Wind Turbine Drivetrains, Denver, CO, US
RENK Test Systems GmbH RENK develops 35 MW nacelle test rig for GNTP wind test center in Korea. https://www.linkedin.com/posts/renk-test-system-gmbh_number1intesting-design-energy-activity-6956155397225250817-A7BL. Accessed 7 Sept 2022
Rimorov D, Tremblay O, Slimani K, Gagnon R, Couillard B (2022) Gain scheduling control design for active front end for power-hardware-in-the-loop application: an LMI approach. IEEE Trans Energy Convers 37(4):2974–2983
Borowski P, Quistorf G, Jersch T (2022) PQ4Wind—A novel test bench for component-level wind turbine converter testing. In: Wind & solar integration workshop, The Hague
Li Z, Zhao F, Chen X, Munk-Nielsen S, Wang X, Geske M, Grune R (2022) Analysis and mitigation of submodule capacitor overvoltage for MMC-based grid emulator under LVRT test. In: Proc. of Wind & Solar Integration Workshop, Delft/The Hague, Netherlands
Ming J, Shenghui C, Joebges P, De Doncker RW (2021) A modular multilevel converter as a grid emulator in balanced and unbalanced scenarios using a delta-wye transformer. In: Proc. of ECCE Conf., Vancouver, BC, Canada
Steurer M, Faruque MO, Bosworth M, Bogdan F, Hauer J, Winkelnkemper M, Schwager L, Blaszczyk P (2016) Multifunctional megawatt-scale medium voltage DC test bed based on modular multilevel converter technology. IEEE Trans Transp Electrific 2(4):597–606
Electromagnetic compatibility (EMC)—Part 3–6: Limits—Assessment of emission limits for the connection of distorting installations to MV, HV and EHV power systems, International Standard IEC/TR 61000-3-6:2008, 2nd edition
IEEE recommended practice and requirements for harmonic control in electric power systems, IEEE Standard 519-2014
Planning levels for harmonic voltage distortion and the connection of non-linear equipment to transmission systems and distribution networks in the United Kingdom, Engineering recommendation G5/4‑1, Issue 4 amendment 1, Oct. 2005
ENTSO‑E Network code for requirements for grid connection applicable to all generators, ENTSO‑E RfG, 2012
Wind energy generation systems—Part 21-1: Measurement and assessment of electrical characteristics—Wind turbines, International standard IEC 61400-21-1:2019, 1st edition
Technical guidelines for power generating units and systems, FGW-TG3:2022, revision 26
IEEE standard conformance test procedures for equipment interconnecting distributed energy resources with electric power systems and associated interfaces, IEEE Standard 1547.1-2020
Inverters, converters, controllers and interconnection system equipment for use with distributed energy resources, UL Standard 1741, Edition 3, 2021
Technical connection rules for medium-voltage, VDE-AR‑N 4110, 2018
Averous R, Stieneker M, De Doncker RW (2015) Grid emulator requirements for a multi-megawatt wind turbine test-bench. In: IEEE 11th Intern. Conf. on Power Electronics and Drive Systems
Saniter C, Janning J (2008) Test bench for grid code simulations for multi-MW wind turbines, design and control. IEEE Trans Power Electron 23(4):1707–1715
Brückner T, Jakob R (2008) New medium-voltage inverter design with very high power density. In: Proc. of IEEE PESC Conf. Rhodes, Greece
Hitachi power semiconductors, IGBT module MBN1500FH45F—Silicon N‑channel IGBT 4500V F version, datasheet, Spec.No. IGBT-SP-15014 R9
Short-circuit currents in three-phase a.c. systems—Part 0: Calculation of currents, International standard IEC 60909-0:2016, 2nd edition
Short-circuit modeling and system strength, NERC white paper webinar, Feb. 2018
Wind energy generation systems—Part 21-4: Measurement and assessment of electrical characteristics—Wind turbine components and subsystems, International standard IEC/TS 61400-21-4:2022, 1st edition
Frehn A, Grune R, Röttgers H, Monti A (2021) Influence of the grid parameters during under voltage ride through (UVRT) testing. Forsch Ingenieurwes 85:559–566
Funding
This work was partially supported through Danish public funding by the Energy Technology Development and Demonstration Programme (EUDP) funds (case no. 64020-1065) (https://eudp.dk/en/node/16112).
Author information
Authors and Affiliations
Contributions
The idea and conception were created by Rayk Grune. The research on existing state-of-the-art apparatuses and technologies was performed by Martin Geske, and on applicable standards and regulations by Rayk Grune. The corresponding sections were written by the authors individually. The final writing and conceptual linking were performed by Rayk Grune. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
R. Grune and M. Geske declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Grune, R., Geske, M. A discussion on the characterization of grid emulators by apparent power rating and short-circuit power. Forsch Ingenieurwes 87, 309–319 (2023). https://doi.org/10.1007/s10010-023-00655-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10010-023-00655-w