
Abstract
This study proposed a safety supervision tool to HRA-based monitoring of ship maintenance operations via a digital platform. It is conceptualized to assist safety supervisors in the best proactive measures along with maintenance works onboard ships. The tool refers the marine maintenance and operations human reliability analysis (MMOHRA) concept. Moreover, it facilitates the timely and consistently practice of MMOHRA. Indeed, it accurately identifies critical tasks and associate recovery acts. Fundamentally, a rule-based mechanism supported with relation matrix response to general task type selection, EPCs’ assignment, and human error probability (HEP) calculation, respectively. Then, the system automatically calculates, visualizes and manages HEP values of operation steps. Consequently, this study digitalizes maritime HRA investigations particular to maintenance operations. The proposed tool, compliance with the relevant sections of updated inspection regimes such as SIRE 2.0 and DryBms, has very high utility to effectively control human element onboard. This study also enables a further research potential to conduct an extended human reliability database in ship fleet level.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Since human error is the dominant factor which causes accidents in many industrial facilities, researchers have been conducting human reliability analysis (HRA) studies with various applications [12, 33]. By means of HRA, safety issues related to the human error had been detected and removed prior to operations within the bounds of possibility.
In the literature, several HRA methods can be utilized in proportion to the operational characteristics. Some methods take human beings as another mechanical components of a system [6]. Therefore, they mostly focus on the difficulties of tasks as well as performance shaping factors (PSF) to obtain the human error probability (HEP). To exemplify, according to Technique for Human Error Rate Prediction (THERP), the factors that affect the human reliability are mainly sourced by PSF [26]. In parallel, Accident Sequence Evaluation Program (ASEP) focuses on safety issues as a simple version of THERP to carry out post-accident analysis [27]. Similarly, Human Cognition Reliability (HCR) also utilizes PSF to find HEP values. [24]. Correspondingly, Success Likelihood Index Method (SLIM) utilizes expert judgments to analyse human reliability. Here, the experts consider the probable effects of PSF when making judgment [7].
Even so, HRA literature produce other methods to conduct more accurate analysis. For this reason, cognitive approaches have been proposed due to unveil causes of errors from behavioural perspective. One of the most utilised approaches among them is Cognitive Reliability and Error Analysis Method (CREAM) [11]. This technique takes advantage of cognitive aspects such as perception, interpretation, planning and action to calculate error probability. Therefore, CREAM can be considered as one of the most proper approaches, where cognitive situation of human actors is critical. Accordingly, A Technique for Human Error Analysis (ATHENA) method proposes a comprehensive framework to analyse human behaviour [5]. It utilizes combinations of operational conditions as well as cognitive factors to explore if a task would be completed with success or failure. Correlatively, the Standardised Plant Analysis Risk–Human Reliability Analysis Method (SPAR-H) strongly dependent on cognitional and behavioural aspects in combination with critical skills of human beings, namely, perception skills, short- and long-term memory, working memory, thinking strategy, decision-making skills of human operators [8].
However, the HRA studies kept developing for carrying out more effective researches via focusing on more specific problems. These problems can change significantly in reference to the type of industrial fields [15]. For this reason, to boost effectiveness,some safety critical industrial fields have generated their own HRA methods based on conventional human error assessment and reduction technique (HEART) method. Since then, domain-specific techniques have become more widespread in safety critical sectors [13].
The conventional HEART proposes EPCs and GTTs to quantify performance shaping factors as well as characteristics of tasks to conduct human error probability (HEP) calculations. There are 38 different EPCs as determined by Williams [30] in HEART method. Adoption of this method to a specific domain has been executed by modifying EPC values in accordance with the industrial circumstances and requirements of the target domain. For instance, Nuclear Action Reliability Assessment (NARA) for nuclear industry [16], Controller Action Reliability Assessment (CARA) for aviation [17], Railway action reliability assessment (RARA) for railway transportation [9], Shipboard Operation Human Reliability Analysis (SOHRA) for ship operations [2] and Marine Maintenance and Operations Human Reliability Analysis (MMOHRA) have been generated for various marine engineering operations [14]. All of these methods have been utilized successfully through numerous case studies to detect safety issues as well as identifying most proper countermeasures. The newest one among them is MMOHRA.
MMOHRA approach was developed empirically to identify HEP values of human error in marine engineering operations. This method mainly focuses on the maintenance and operational tasks which are related to machinery and equipment of ship propulsion systems. These tasks may belong to engineering officers who are responsible for many technical operations in a ship engine room, or belong to supervisors and safety practitioners who perform in offshore services or similar responsibilities. This method has proven itself as a successful domain specific HRA through several case studies [14]. Nevertheless, the implementation process of MMOHRA is open for some improvements as similar with other HEART-based approaches. Previous case studies have shown that this type of methods should be applied in more practical way. This necessity mainly comes from the time constraints of operations and complexity of HRA application process. Moreover, it should be noted that there are some new challenges as compatibility with digital devices and keeping social distance of human beings due to some coronavirus types. Hence, HRA techniques can be enhanced with software tools and supportive systems which may have the features described below:
-
Allowing easy and practical application
-
Minimizing time consumption
-
Operability in digital environment
-
Providing remote analysis option when needed
According to previous studies [3, 12,13,14],researchers, marine engineers, supervisors and other safety practitioners had spent minimum of 317 min to complete each case study with SOHRA and MMOHRA, while the highest record was 608 min, which belongs to a diesel generator overhaul operation. In marine engineering ecosystem, where the time is so significant, there could be unwillingness toward safety applications due to overloaded schedules. Therefore, time saving, simpler, digitalized and human health friendly solutions can contribute greatly to overcome such problems. According to the literature, these challenges can be achieved by some tools and modules which are integrated into the safety methods. Safety decision tools, decision support tools, expert systems or simply support tools have been proposed to enhance the effectiveness of a relevant safety approach to provide more effective, innovative, user friendly, time saving options.
In the maritime, Virkki-Hatakka and Reniers [29] have proposed a safety decision tool which helps safety managers to help them take decisions on prevention measures more efficiently. This tool requires no additional time during the application process but increases the effectiveness of safety countermeasures. Likewise, [19] introduced an artificial intelligence-based expert system to support a ship owner’s crew management system considering the shipping safety. For ship personnel, Cebi et al. [4] proposed a decision support system for shipboard personnel which aims to provide more practicable troubleshooting of ship auxiliary machinery errors. Hence, they established an effective rule-based system to response malfunction situations in a timely manner. Similarly, Perera et al. [23] developed an onboard decision support system to contribute in ship safety through identifying potential consequences of the different ship handling scenarios. This decision support helps safety practitioners in terms of time management and easy application. In search and rescue operations, [20] established a decision support tool using a set of threat factors and a four-level ship safety categorization. They have provided an effective information sharing ecosystem for supervisors as well as more rapid application procedure for determining safety level of ships. Zodiatis et al. [34] suggested the “Mediterranean Decision Support System for Marine Safety” to strengthen the maritime safety related to oil spill pollution in the Mediterranean Sea. Therefore, the emergency response activities can be more urgent, where the time is so significant (see also: [28]. With the same purpose, Sarvari et al. [22] designed a real-time decision support system for evacuation planning in ferryboats [21] intended a safety decision tool to support safety acts via assessing and visualizing the level of hazard in terms of ship navigation through encountering the other ships. Likewise, Zhang et al. [32] suggested a probability assessment toward autonomous cargo ships focusing on the human-autonomy collaboration in emergency response process. They aimed to provide easier safety management with their comprehensive human error focused approach.
Nevertheless, considering the safety enhancing tools in the literature, HRA-based tools remain limited. For instance, He et al. [10] provided a simplified CREAM prospective quantification process to carry out more practicable HRA. Thus, they created an easily applied and time saving module for CREAM. These tools enable safety practitioners to manage their time more effectively. Correspondingly, the study of Serwy and Rantanen [25] introduced the problem of time-consuming process of CREAM approach thus they proposed a software-based tool to achieve this challenge. They also provided an easy implementation in comparison to process of classical CREAM application. Similarly, Wu et al. [31] have suggested a reasoning-based tool for maritime accidents. Hence, they have provided more practical application tool of CREAM for the maritime industry. As seen, the tools that integrated into safety approaches can provide substantial responses to their focused challenges. Similarly, a safety supervision tool can overcome the challenges of HEART-based methods. Nevertheless, the literature is poor for proposing practicable, easy-implementation, digitalized and remotely controllable application tools for HEART-based studies. In the literature, Akyuz and Celik [1] have identified a software-based tool for easier process of HEART. This tool allows to calculate all processes via computer in a user-friendly way, however, there is no significant effect on other features such as reducing time consumption. For this reason, this study proposes a software-based safety supervision tool for MMOHRA (as a HEART-based method) applications in response these matters in marine engineering domain. The aim of this tool is to conduct rapid, easier, practical, social distance friendly and simpler implementation of MMOHRA. Since there is no effective tool for HEART in the literature, the rule-bases of this tool not only operable for MMOHRA but also enhancing EPC and GTT selection procedures of HEART method. Thus, all HEART-based methods can be benefitted from these rule sets. Furthermore, a flowchart is introduced to explain how this tool is expected to provide a decision support ecosystem through providing tan option to conduct remote HRA for safety supervisors.
2 Methodology
Since the proposed tool is designed to provide more practical application; the whole process should be reviewed from the beginning to the end. For this reason, MMOHRA steps are introduced in Sects. 2.1 and 2.2 with details. The proposed tool is structured on MMOHRA through using rule sets for EPC and GTTs. The details of rule set establishment are given in Sect. 2.3.
2.1 MMOHRA method
In HEART-based HRA methods, domain-specific approaches were proposed through modifying EPCs in accordance with the requirements of a target field. In this sense, the first developed approach for maritime industry is SOHRA [2]. In SOHRA, the marine specific EPC values were determined, while nominal human unreliability values in the GTT remained untouched. Similarly, MMOHRA was developed for marine engineering specific HRA calculations via modifying EPC definitions and EPC values. In parallel with SOHRA and other domain specific methods, nominal human unreliability values remained as the same of the conventional HEART method. Hence, the implementation process of MMOHRA can be listed as below [14].
Step 1: Task analysis A task analysis should be performed to specify task characteristics of operations. Therefore, each task can be categorized in accordance with the generic task types (GTT) which are listed in Table 1.
Step 2: Analysing safety issues Operational conditions should be analysed and safety issues must be clarified. Such issues can be various conditions such as unreliable instruments, narrow working environment, fatigue, unfamiliarity of crew, and etc.
Step 3: Selection of GTT and EPC As mentioned before, these two parameters are crucial to calculate final HEP values. The GTT selection is carried out to detect generic human error probability. For each task, a generic task type is assigned. Similarly, the EPCs should be assigned with respect to the conditions. The full list of EPCs is shown in Table 2.
Step 4: APOA calculation The assessed proportion of affect (APOA) calculation determines proportion effect of each existing EPC on a specific task. It can be determined with a multi criteria group decision methods such as analytical hierarchy process (AHP) to reveal the weights of nominated EPCs. If each EPC has equal affect in accordance to the safety experts; then APOAs of EPCs should be the same for a specific task.
Step 5: HEP calculation HEP value should be calculated for each task. To conduct, Eq. 1 is used. In the equation, EPCi is the ith (i = 1, 2, 3, … n; n ≤ 38) EPC and APOApi (0 < pi ≤ 1) is ith the assessed proportion of ith EPCs:
In some cases, safety practitioners can also obtain the overall HEP value for whole operation, or for multiple tasks. In such circumstances, logic relation and dependencies between tasks should also be determined to calculate an overall HEP value. For instance, if failure of one task leading to failure of multiple tasks and these tasks are highly dependent to one another; the highest HEP of all tasks can be obtained as overall HEP. In different situations, the formula of this calculation may change. However, the proposed tool of this paper calculates HEP values for each task. Since there are no combining HEP values, there is no need to carry out a further process. More information on logic relation and dependencies can be found in He et al.’s [10] research.
2.2 Procedure
The application of the MMOHRA depends on the data obtained from marine experts. Marine experts often follow the procedure which is listed below for a specific operation:
-
Pre-meeting: a pre-meeting is conducted to give information to the experts in terms of the methods about to be implemented, what should they do and how to make it right.
-
Determining hierarchical task process: the operation about to begin should be determined step by step hierarchically. Each task step should be clarified.
-
Observing the conditions: which of the EPCs do exist among 38 EPCs of the MMOHRA should be observed and noted.
-
Reviewing the conditions: each expert’s EPCs should share with the others to establish a mutual agreement.
-
Determining GTTs: a GTT for each task should be assigned in accordance to the task description. There are 9 GTTs in HEART-based methods.
-
Determining EPCs: tasks are not affected from existing EPCs in the same way. Some EPCs may not affect some tasks. At this point, experts should assign EPCs for each task in a mutual agreement.
-
Calculating HEP values: since the two crucial parameters of GTTs and EPCs are assigned; the HEP values should be calculated for each task. In this step, APOAs can also be specified.
-
Recovery actions: when the HEP values are found, the tasks with high probabilities should be noted and the most proper recovery actions should be identified.
All these phases can take plenty of time and experts may make some mistakes during the process. In some cases, there can be more than 50 tasks to complete an operation in marine engineering. Thus, more practical, supportive, user friendly safety supervision tool is required to boost the effectiveness of such safety focused actions while reducing the required time.
2.3 Establishing rule bases
Rule bases are established for selecting GTTs and EPCs for each task group. To accomplish this aim, a consensus should be agreed amongst marine experts. In the case of the current research this consisted of 3 researchers and 2 engineers who review and discuss all processes. Two of the researchers have the title of professorship as they have studied on HRA more than 13 years with numerous published studies. Another researcher works as research assistant with more than 8 years of HRA experience. One of the engineers is second officer who have the experience of 5 years in ship engine room operations as well as involved in HRA case studies. Finally, the other engineer works as a safety supervisor offshore for more than 10 years in addition to his marine engineering career on-board.
2.3.1 Rule base for GTT selection
GTT selection is a complex task for the supervisors who are responsible to take safety precautions prior to a ship engine room operation. The complexity of this process is arisen from the task categorization process due to long descriptions of GTT categories, which are not prepared for specific domains in HEART-based methods. For each operational task, GTTs and definitions were examined by responsible experts over again, so this process becomes an exhaustive and time-consuming action. For this reason, this process should be transformed into more practical way.
Considering the descriptions of GTTs (see Table 1), there are four important aspects come into prominence: (1) task complexity, (2) task pace, (3) unfamiliarity, (4) operational support and aid.
These aspects make it is possible to establish a matrix which can be compatible for the rule base of GTT selection. To accomplish this aim, a consensus of marine experts consisting of a marine director, 3 researchers and 2 engineers are involved. Thus, in light of the GTT descriptions and these four aspects, a matrix is established, as shown in Fig. 1. This matrix enables to create an if–then rule structure to execute practical GTT selection process. As a result, the rule base can be generated, as listed in Table 3.

GTT selection matrix
According to this rule set, responsible experts can carry out GTT selection process via a simple procedure by questioning a task’s nature in terms of four different aspects. They can assign GTTs with specifying the existing aspects of corresponding task. This can also be utilized by other HEART-based methods’ GTT selection process.
2.3.2 Rule base for EPC selection
Since there are 38 different EPCs in MMOHRA, EPC selection phase can be considered as more complex work in comparison with the GTT selection. Safety practitioners should examine all EPCs for each task over again. Hence, likewise the GTT selection process; it takes a long time to determine EPCs in a certain time period. Instead of carrying out such exhaustive process, safety practitioners should only determine what EPCs do exist prior to the operation, for once. In this way, a safety supervision tool can match all EPCs with the proper tasks automatically. To provide this, tasks can be classified into groups. According to the previous case studies (see: [3, 12,13,14] and expert judgments marine engineering task groups can be determined as: lifting coverings or blocks, equipment disassembly, equipment transfer, equipment alignment, measurement, cleaning, inspection, repair and replacement, equipment re-assembly, test and control.
A comprehensive operation may contain all of these task groups; however, simple operations may only have a couple of them. Therefore, the supervisors should specify the overall conditions (EPCs) and should select the task groups at the beginning of an operation. According to the tasks, the EPCs which can affect the operational safety can be automatically determined in accordance with the matrix in Table 5 in the Apprentices section. Likewise, the GTT selection matrix, this matrix is established by the consensus of the same experts. In this way, EPCs can be assigned instantly and dynamically.
3 Safety supervision tool
The safety supervision tool is designed to process practical HEP calculations using the if–then rule base of GTT selection process and EPC selection matrix.
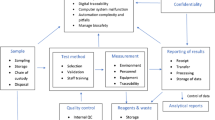
Therefore, it can provide rapid information about critical tasks of the operation in terms of their risk level. In this sense, a software code which is written through “Python 3” language is structured. Besides, “SQLite” database is also used to embed EPCs and GEPs with their values according to MMOHRA approach. Eventually, the framework of safety supervision tool system is illustrated in Fig. 2.

Flowchart of safety supervision tool
The tool is prepared to calculate HEP values through MMOHRA in a user friendly and practical way. The opening menu is shown in Fig. 3. As shown in the figure, the process has 7 main functionalities as; adding and removing GTTs or EPCs, monitoring existing GTTs and EPCs as well as calculating them. The calculation process can be initiated after all operational conditions are determined. The task groups and their GTT assignment process can be carried out, as shown in Fig. 4. At first, a user must enter at least one task group type for a given operation. In the figure, user selects “Task group 2” (which is the code of “disassembly of an equipment”). Afterward, system asks four different aspects of GTT if they exist or not, for each task group.

Opening menu of the programme

GTT selection for a task group
EPCs can be selected with simply adding them one by one prior to the operation. The system simply asks a reply for the code of EPC to memorize it. After determining the GTTs and EPCs, then the calculation process can be conducted with “calculate (7)” function. Therefore, safety supervision tool automatically calculates the HEP values for each defined task types as indicated in Fig. 5. According to the results, further analysis can be conducted.

Calculation results section
After determining the GTTs and EPCs, then the calculation process can be conducted by entering “7” at the opening menu. Therefore, the tool automatically calculates the HEP values for each defined task types.
4 Proposed approach
The proposed approach with the safety supervision tool can be executed with the framework, as shown in Fig. 6. In this figure, turquoise coloured boxes must be done via the tool. Descriptions of this framework are expressed below step by step:

Framework of the proposed approach
-
Step 1: Hierarchical task analysis At the beginning, it is required to carry out an operation plan to specify hierarchical tasks clearly. In general, the operation plan already exists for majority of the operations.
-
Step 2: Specifying task groups Tasks should be categorized into the task groups in accordance to their descriptions. There are 10 task groups determined in safety supervision tool (see Table 5).
-
Step 3: GTT selection GTTs of each task group should be identified via safety supervision tool.
-
Step 4: EPC selection Operational conditions should be analysed and clarified corresponding with 38 EPCs. The most appropriate EPCs should be determined. These EPCs should be chosen from the list of 38 possible EPCs as they can be various such as unreliable instruments, narrow working environment, fatigue, unfamiliarity of crew, and etc. (see Table 2).
-
Step 5: HEP results HEP results can be identified for each task group by simply using the “calculate” function of the safety supervision tool. If the probability levels are low, operation may continue as it can be considered as safe operational conditions. Nevertheless, it is highly recommended that further analysis should be conducted when there are high HEP values for related task groups.
-
Step 6: Further analysis If HEP value of a task group is assessed as high, all tasks in that group should be examined as it is executed in the classical approach, one by one. Therefore, safety practitioners can focus only to the critical tasks while ignoring the low HEP valued task groups.
-
Step 7: Take recovery actions Recovery actions should be taken in response to the existing EPCs of critical tasks. Some actions can remove more than one EPC; so, this part of the process should be carried out carefully. After successfully removing some EPCs, safety supervision tool should calculate HEP levels once again in regard to the new situation. The process can be repeated until all task groups have low HEP levels.
5 Discussion
The main objectives of the introduced tool are to minimize the time consumption of implementation process as well as to provide simpler solution to conduct easy, distant and smooth application of MMOHRA. Hence, it can also be useful for a working environment which are under threat of dangerous virus types such as COVID-19. The tool is designed as compatible for dynamic analysis in case of changes in operation planning or existing conditions which are related to human error. Moreover, it can be updated with the latest data of key parameters when further studies will have found new EPC and GTT values. Furthermore, it can be modified into any domain specific HEART-based methods. The generic framework of the process can be utilized in such opportunities.
In the classical implementation, time consumption levels of an average level marine engineering operation may take more than 7 h. However, it may reduce to less than 3 h via safety supervision tool. These values reflect the average time consumption of past studies (See: [3, 12,13,14]. Moreover, all experts who are introduced under Sect. 2.3 were involved in past studies and they also agreed of time consumption results. Moreover, they have participated in both types of classical and rule-based approaches. For each case study, pre-meeting, hierarchical task analysis, observing the operational conditions and reviewing the conditions via meeting were completed. However, the next actions differ through the type of approach; as they mainly consist of determining GTTs, EPCs and HEP values. For this reason, the initial time consumptions are the same for both applications. At first, classical approach was done in accordance with MMOHRA. Second, the process was done via safety supervision tool. At this point, the operations were not restarted but the tool was utilized with specifying task classes to reveal this approach’s time consumption in addition to the common actions. Since the rest of the actions are completely different, classical approach has very little effect on the rule-based approach’s activities. Eventually, the approximate timelines of the two approaches are revealed, as shown in Table 4. As shown in the table, first four actions are exactly the same, while rest of them differs greatly.
Despite the approximate values in Table 4, it is very likely that an HRA can be planned to conduct by safety practitioners who have already experienced about the method as well as the whole process of a specific operation. In case of such circumstances; the required time for MMOHRA application could reduce to 90–100 min, as the first two steps would likely to reduce largely.
The advantage of the tool is not only reducing the time consumption but also providing simpler solution which is important for safety practitioners. In this way, they can apply MMOHRA easily and smoothly. As a result, the method can be applied more frequently for any operation. Since the proposed framework is compatible for all HEART-based methods, it is expected that use of such applications become more widespread in industrial organizations as they can benefit from them more effectively.
6 Conclusion
In the HRA literature, The HEART-based domain specific methods have been utilized more commonly in various case studies. These methods can be very effective when they are implemented meticulously. However, the implementation phase can be very exhaustive, complicated and difficult for safety managers due to its labour-intensive procedure. For this reason, this study proposes a safety supervision tool for MMOHRA, as a HEART-based marine engineering specific HRA method. The tool is established upon the rule base of the most complicated processes of GTT assignment, EPC selection and HEP calculation. Therefore, it can provide a practical application environment.
The rule base for GTT selection is established for not only MMOHRA, but also all HEART-based HRA methods. The selection of GTT has been an important challenge for these methods. Moreover, marine engineering tasks are classified into “task groups” to allow simpler application. In this way, a matrix is created for matching task groups and 38 EPCs. Hence, EPCs are corresponded with the task groups and automatic assignment of them is provided. In addition to these, HEP calculations can be performed by the safety supervision tool through a simple “calculate” function. Considering these advancements, whole process can save significant amount of time in comparison with classical approach. Besides, complexity of whole implementation process is also reduced greatly for safety practitioners. The proposed tool has very high utility to effectively control human element onboard which is following the relevant sections of updated inspection regimes such as SIRE 2.0 and DryBms. Furthermore, safety supervision tool allows an advantageous HRA procedure for working environments under the threat of contagious virus types, i.e., COVID-19.
Apart from these aspects, input data of a user can be updated during the middle of any operation when it is required. It is compatible with dynamic analysis with simple functions such as adding or removing EPCs or GTTs. In addition, the tool itself can be updated with the latest values of EPCs or GTTs in case of there will be new results from a future research. Moreover, the framework or the rule base of this study can be utilized for future HEART-based studies with specific modifications.
Abbreviations
- APOA:
-
Assessed proportion of affect
- ASEP:
-
Accident Sequence Evaluation Program
- ATHENA:
-
A Technique for Human Error Analysis
- CARA:
-
Controller Action Reliability Assessment
- CREAM:
-
Cognitive Reliability and Error Analysis Method
- EPC:
-
Error producing condition
- GEP:
-
Generic error probability
- GTT:
-
Generic task type
- HCR:
-
Human cognition reliability
- HEART:
-
Human error assessment and reduction technique
- HEP:
-
Human error probability
- HRA:
-
Human reliability analysis
- MMOHRA:
-
: Marine maintenance and operations human reliability analysis
- NARA:
-
Nuclear Action Reliability Assessment
- PSF:
-
Performance shaping factors
- RARA:
-
Railway Action Reliability Assessment
- SLIM:
-
Success Likelihood Index Method
- SOHRA:
-
Shipboard operations human reliability analysis
- SPAR-H:
-
: Standardised Plant Analysis Risk–Human Reliability Analysis Method
- THERP:
-
Technique for human error rate prediction
References
Akyuz E, Celik M (2015) Computer-based human reliability analysis onboard ships. Procedia Soc Behav Sci 195:1823–1832
Akyuz E, Celik M, Cebi S (2016) A phase of comprehensive research to determine marine-specific EPC values in human error assessment and reduction technique. Saf Sci 87:63–75
Bicen S, Kandemir C, Celik M (2021) A human reliability analysis to crankshaft overhauling in dry-docking of a general cargo ship. Proc Inst Mech Eng Part M J Eng Marit Environ 235(1):93–109
Cebi S, Celik M, Kahraman C, Er ID (2009) An expert system towards solving ship auxiliary machinery troubleshooting: SHIPAMTSOLVER. Expert Syst Appl 36(3):7219–7227
Cooper SE, Ramey-Smith AM, Wreathall J, Parry GW (1996). A technique for human error analysis (ATHEANA): technical basis and methodology description. USNRC; 1996. No. Nureg/CR-6350, p 996
Di Pasquale V, Iannone R, Miranda S, Riemma S (2013). An overview of human reliability analysis techniques in manufacturing operations. Oper Manag 221–240
Embrey DE, Humphreys PC, Rosa EA, Kirwan B, Rea K (1984) SLIM-MAUD: an approach to assessing human error probabilities using structured expert judgement. NUREG/CR-3518. US Nuclear Regulatory Commission: Washington DC
Gertman D, Blackman H, Marble J, Byers J, Smith C (2005). The SPAR-H human reliability analysis method. NUREG/CR-6883. US Nuclear Regulatory Commission, Washington DC
Gibson W, Mills AM, Smith S, Kirwan BK (2013). Railway action reliability assessment a railway—specific approach to human error quantification. In: Proceedings of the Australian system safety conference, vol 145, pp 3–8
He X, Wang Y, Shen Z, Huang X (2008) A simplified CREAM prospective quantification process and its application. Reliab Eng Syst Saf 93(2):298–306
Hollnagel E (1998) Cognitive reliability and error analysis method. Elsevier, Amsterdam
Kandemir C, Celik M (2019). Cogn Tech Work. https://doi.org/10.1007/s10111-019-00590-3
Kandemir C, Celik M, Akyuz E, Aydin O (2019) Application of human reliability analysis to repair & maintenance operations on-board ships: the case of HFO purifier overhauling. Appl Ocean Res 88
Kandemir C, Celik M (2021) Determining the error producing conditions in marine engineering maintenance and operations through HFACS-MMO. Reliab Eng Syst Saf 206:107308
Kandemir C, Celik M (2022) A systematic literature review and future insights on maritime and offshore human reliability analysis. Proc Inst Mech Eng Part M J Eng Marit Environ 14750902221098308
Kirwan B, Gibson H, Kennedy R, Edmunds J, Cooksley G, Umbers I (2004) Nuclear action reliability assessment (NARA): a data-based HRA tool. In: Probabilistic safety assessment and management. Springer, London, pp 1206–1211
Kirwan B, Gibson H (2007) CARA: a human reliability assessment tool for air traffic safety management—technical basis and preliminary architecture. In: The safety of systems. Springer, London, pp 197–214
Kustra W, Jamroz K, Budzynski M (2016) Safety PL—a support tool for road safety impact assessment. Transport Res Procedia 14:3456–3465
Łosiewicz Z, Nikończuk P, Pielka D (2019) Application of artificial intelligence in the process of supporting the ship owner’s decision in the management of ship machinery crew in the aspect of shipping safety. Procedia Comput Sci 159:2197–2205
Nordström J, Goerlandt F, Sarsama J, Leppänen P, Nissilä M, Ruponen P, Sonninen S (2016) Vessel TRIAGE: a method for assessing and communicating the safety status of vessels in maritime distress situations. Saf Sci 85:117–129
Ożoga B, Montewka J (2018) Towards a decision support system for maritime navigation on heavily trafficked basins. Ocean Eng 159:88–97
Sarvari PA, Cevikcan E, Celik M, Ustundag A, Ervural B (2019) A maritime safety on-board decision support system to enhance emergency evacuation on ferryboats. Marit Policy Manag 46(4):410–435. https://doi.org/10.1080/03088839.2019.1571644
Perera LP, Rodrigues JM, Pascoal R, Guedes Soares C (2012). Development of an onboard decision support system for ship navigation under rough weather conditions. In: Rizzuto E, Guedes Soares C (eds) Sustainable maritime transportation and exploitation of sea resources. Taylor & Francis Group, London, pp 837–844
Rasmussen J (1983) Skills, rules, and knowledge; signals, signs, and symbols, and other distinctions in human performance models. IEEE Trans Syst Man Cybern 3:257–266
Serwy RD, Rantanen EM (2007) Evaluation of a software implementation of the cognitive reliability and error analysis method (CREAM). In: Proceedings of the human factors and ergonomics society annual meeting, vol 51, no 18. SAGE Publications, Sage, pp 1249–1253
Swain AD, Guttman HE (1983) Handbook of human reliability analysis with emphasis on nuclear power plant applications, NUREG/CR-1278. Washington, DC: US Nuclear Regulatory Commission
Swain AD (1987) Accident sequence evaluation program human reliability analysis procedure, NUREG/CR-4772. Washington, DC: US Nuclear Regulatory Commission
Varela JM, Rodrigues JM, Soares CG (2014) On-board decision support system for ship flooding emergency response. Procedia Comput Sci 29:1688–1700
Virkki-Hatakka T, Reniers GL (2009) A case-based reasoning safety decision-support tool: nextcase/safety. Expert Syst Appl 36(7):10374–10380
Williams JC (1988) A data-based method for assessing and reducing human error to improve operational performance. In: Conference record for 1988 IEEE fourth conference on human factors and power plants. IEEE, pp 436–450
Wu B, Yan X, Wang Y, Soares CG (2017) An evidential reasoning-based CREAM to human reliability analysis in maritime accident process. Risk Anal 37(10):1936–1957
Zhang M, Zhang D, Yao H, Zhang K (2020) A probabilistic model of human error assessment for autonomous cargo ships focusing on human–autonomy collaboration. Saf Sci 130:104838
Zhou JL, Lei Y, Chen Y (2019) A hybrid HEART method to estimate human error probabilities in locomotive driving process. Reliab Eng Syst Saf 188:80–89
Zodiatis G, De Dominicis M, Perivoliotis L, Radhakrishnan H, Georgoudis E, Sotillo M, Mancini M (2016) The Mediterranean decision support system for marine safety dedicated to oil slicks predictions. Deep Sea Res Part II 133:4–20
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
About this article

Cite this article
Kandemir, C., Celik, M. A safety supervision tool toward digitalization of maritime HRA applications: the case of MMOHRA. J Mar Sci Technol 28, 87–97 (2023). https://doi.org/10.1007/s00773-022-00911-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-022-00911-8