
Abstract
For the navigation safety of ships, it is essential to monitor the maneuvering characteristics under external disturbances due to wind and waves. For this purpose, evaluating the average steady sailing conditions such as check helm, speed drop, hull drift angle, etc. of a ship moving straight in steady wind and waves is beneficial. In addition, the dynamic stability (course stability) of the ship should be evaluated under its steady sailing condition. This study proposes a method for predicting the steady sailing conditions and course stability under external disturbances, based on the MMG standard method presented by Yasukawa and Yoshimura (J Mar Sci Technol 20(1):37–52, 2015). The calculation accuracy of the MMG method has been validated through experiments. The steady sailing conditions and the course stability of a pure car carrier are calculated using the proposed method under external disturbances in deep and shallow waters. In addition, the environmental conditions that limit safe navigation (maneuvering limit) are also discussed, while investigating the effect of the main engine output in particular. In both deep and shallow waters, a significant effect on the maneuvering limit is observed due to a reduction in engine output. Thus, the presented method is useful in capturing the maneuvering limit of the ship under external disturbances.

















Similar content being viewed by others

Abbreviations
- \(A_X\), \(A_Y\) :
-
Front and side profile areas of the ship in air, respectively
- \(A_{\text {R}}\) :
-
Rudder profile area
- a, b :
-
Coefficients of the roll-extinction curve
- \(a_{\text {H}}\) :
-
Rudder force increase factor
- B :
-
Ship breadth
- \(C_{\text {b}}\) :
-
Block coefficient
- \(C_{{\text {XA}}}\), \(C_{{\text {YA}}}\), \(C_{\text {NA}}\), \(C_{\text {KA}}\) :
-
Aerodynamic force coefficients with respect to surge force, lateral force, yaw moment and roll moment, respectively
- \(C_{{\text {XW}}}\), \(C_{{\text {YW}}}\), \(C_{{\text {NW}}}\), \(C_{{\text {KW}}}\) :
-
Wave-induced steady force coefficients with respect to surge force, lateral force, yaw moment and roll moment in regular waves, respectively
- \(\overline{C_{{\text {XW}}}}\), \(\overline{C_{{\text {YW}}}}\), \(\overline{C_{{\text {NW}}}}\), \(\overline{C_{{\text {KW}}}}\) :
-
Average wave-induced steady force coefficients with respect to surge force, lateral force, yaw moment and roll moment in irregular waves, respectively
- \(D_{{\text {P}}}\) :
-
Propeller diameter
- d :
-
Ship draft
- \(F_{{\text {N}}}\) :
-
Rudder normal force
- \(F_n\) :
-
Froude number based on ship length
- \(f_{\text {A}}\) :
-
Correction coefficient when ship heels
- \(f_{\alpha }\) :
-
Rudder normal force gradient coefficient
- \(\overline{GM}\) :
-
Metacentric height
- \(G(\theta )\) :
-
Wave direction distribution function
- \(G_1, G_2\) :
-
Control gains for autopilot
- g :
-
Gravity acceleration
- \(H_{1/3}\) :
-
Significant wave height
- \(H_{\text {R}}\) :
-
Rudder span length
- h :
-
Water depth
- \(I_{xx}, I_{zz}\) :
-
Moment of inertia of the ship around \(x\)- and \(z\)-axes, respectively
- \(J_{{\text {P}}}\) :
-
Propeller advance ratio
- \(J_{{\text {P}}0}\) :
-
Propeller advance ratio during forward motion
- \(J_{xx}, J_{zz}\) :
-
Added moment of inertia around \(x\)- and \(z\)-axes, respectively
- \(\overline{KM}\) :
-
Metacenter height above baseline
- \(K_{\text{T}}\) :
-
Propeller thrust open water characteristic
- \(K_{\text{Q}}\) :
-
Propeller torque open water characteristic
- \(K_{\dot{\phi }}\), \(K_{\dot{\phi }\dot{\phi }}\) :
-
Roll damping coefficients
- \(k_{xx}\) :
-
Radius of roll gyration including added moment of inertia with respect to the roll
- \(k_2, k_1, k_0\) :
-
Coefficients that represent \(K_{\text {T}}\)
- L :
-
Ship length between perpendiculars
- \(l_{{\text {P}}}\) :
-
Longitudinal coordinate of the propeller position in the formula for \(\beta _{{\text {P}}}\)
- \(l_{\text {R}}\) :
-
Effective longitudinal coordinate of the rudder position in the formula for \(\beta _{\text {R}}\)
- m :
-
Ship’s mass
- \(m_x\), \(m_y\) :
-
Added masses of the x-axis direction and y-axis direction, respectively
- \(N_{{\text {MCR}}}\) :
-
Propeller revolution at Maximum Continuous Rating (MCR)
- \(N_{{\text {NOR}}}\) :
-
Propeller revolution at Normal Rating (NOR)
- \(N_v'\), \(N_{\text {r}}'\), \(N_{\phi }'\), \(N_{vvv}'\) etc.:
-
Hydrodynamic derivatives with respect to yaw moment
- \(n_{{\text {P}}}\) :
-
Propeller revolution
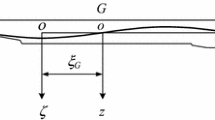
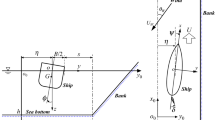
- O-\(x_0y_0z_0\) :
-
Space fixed coordinate system
- o-xyz :
-
Horizontal body fixed coordinate system considering the origin at midship
- \(P_{{\text {E}}}\) :
-
Effective power
- \(P_{{\text {MCR}}}\) :
-
Engine power at MCR
- \(P_{{\text {NOR}}}\) :
-
Engine power at NOR
- Q :
-
Propeller torque
- \(Q_{{\text {EMAX}}}\) :
-
Maximum propeller torque of the main engines
- \(q_2, q_1, q_0\) :
-
Coefficients that represent \(K_{\text {Q}}\)
- \(R_0\) :
-
Ship resistance in straight moving
- r :
-
Yaw rate
- \(S_{\zeta \zeta }\) :
-
Wave spectrum
- T :
-
Propeller thrust
- \(T_{{\text {P}}}\) :
-
Average wave period
- t :
-
Time
- \(t_{{\text {P}}}\) :
-
Thrust deduction fraction
- \(t_{\text {R}}\) :
-
Steering resistance deduction factor
- U :
-
Resultant speed (\(=\,\,\sqrt{u^2+v_{\text {m}}^2}\))
- \(U_0\) :
-
Approach ship speed
- \(U_{\text {R}}\) :
-
Resultant inflow velocity to the rudder
- \(U_{\text {W}}\) :
-
Absolute wind velocity
- u, v :
-
Surge velocity and lateral velocity at the center of gravity, respectively
- \(u_0\), \(v_0\), \(\psi _0\), \(\phi _0\), \(\delta _0\) :
-
Steady components of surge velocity, lateral velocity, heading angle, heel angle and rudder angle, respectively
- \(u_{\text {A}}\), \(v_{\text {A}}\) :
-
Relative surge velocity and lateral velocity component due to wind, respectively
- \(u_{\text {R}}\), \(v_{\text {R}}\) :
-
Longitudinal and lateral inflow velocity components of the rudder, respectively
- \(V_{\text {A}}\) :
-
Relative wind velocity
- \(V_{\text {S}}\) :
-
Design speed of the ship
- \(v_{\text {m}}\) :
-
Lateral velocity at midship
- \(w_{{\text {P}}}\) :
-
Effective wake fraction at the propeller position in maneuvering motions
- \(w_{{\text {P}}0}\) :
-
Effective wake fraction at the propeller position during forward motion
- X, Y, \(N\), \(K\) :
-
Surge force, lateral force, yaw moment, and roll moment with the exception of added mass components, respectively
- \(X_{\text {A}}\), \(Y_{\text {A}}\), \(N_{\text {A}}\), \(K_{\text {A}}\) :
-
Surge force, lateral force, yaw moment, and roll moment due to wind, respectively
- \(X_{\text {H}}\), \(Y_{\text {H}}\), \(N_{\text {H}}\) :
-
Surge force, lateral force, and yaw moment acting on the ship hull with the exception of added mass components, respectively .
- \(X_{{\text {P}}}\) :
-
Surge force due to the propeller
- \(X_{\text {R}}\), \(Y_{\text {R}}\), \(N_{\text {R}}\) :
-
Surge force, lateral force, and yaw moment by steering, respectively
- \(X_{\text {W}}\), \(Y_{\text {W}}\), \(N_{\text {W}}\), \(K_{\text {W}}\) :
-
Wave-induced steady surge force, lateral force, yaw moment, and roll moment, respectively
- \(X_{vv}'\), \(X_{rr}'\), \(X_{\phi \phi }'\), \(X_{vr}'\) etc.:
-
Hydrodynamic derivatives with respect to surge force
- \(x_{\text {G}}\) :
-
Longitudinal coordinate of the center of gravity of the ship
- \(x_{\text {H}}\) :
-
Longitudinal coordinate of the acting point of the additional lateral force component induced by steering
- \(x_{\text {R}}\) :
-
Longitudinal coordinate of the rudder position (=\(-0.5L\))
- \(Y_v'\), \(Y_{\text {r}}'\), \(Y_{\phi }'\), \(Y_{vvv}'\), etc.:
-
Hydrodynamic derivatives with respect to lateral force
- \(z_{\text {G}}\) :
-
Vertical coordinate of the center of gravity of the ship
- \(z_{\text {H}}\) :
-
Vertical coordinate of the acting point of the hull lateral force
- \(z_{{\text {P}}}\) :
-
Vertical coordinate of the propeller position
- \(z_{\text {R}}\) :
-
Vertical coordinate of the acting point of the rudder force
- \(z_{\text {W}}\) :
-
Vertical coordinate of the acting point of wave-induced lateral force
- \(\alpha _{\text {R}}\) :
-
Effective inflow angle to the rudder
- \(\alpha _z\) :
-
Vertical acting point of the lateral added mass component \(m_y\)
- \(\beta\) :
-
Hull drift angle at midship
- \(\beta _{{\text {P}}}\) :
-
Geometrical inflow angle to the propeller in maneuvering motions
- \(\beta _{\text {R}}\) :
-
Effective inflow angle to the rudder in maneuvering motions
- \(\gamma _{\text {R}}\) :
-
Flow straightening coefficient
- \(\varDelta u\), \(\varDelta v\), \(\varDelta \psi\), \(\varDelta \phi\), \(\varDelta \delta\) :
-
Unsteady components of surge velocity, lateral velocity, heading angle, heel angle and rudder angle, respectively
- \(\delta\) :
-
Rudder angle
- \(\epsilon\) :
-
Ratio of the wake fraction at the propeller and rudder positions
- \(\eta\) :
-
Ratio of the propeller diameter to the rudder span (\(=\,\,D_{{\text {P}}}/H_{\text {R}}\))
- \(\eta _{\text {R}}\) :
-
Relative rotative efficiency
- \(\theta _{\text {A}}\) :
-
Relative wind direction
- \(\theta _{\text {W}}\) :
-
Absolute wind direction
- \(\kappa\) :
-
Experimental constant for expressing
- \(\rho\) :
-
Water density
- \(\rho _{\text {a}}\) :
-
Air density
- \(\phi\) :
-
Roll angle
- \(\chi\) :
-
Absolute wave direction
- \(\chi _0\) :
-
Relative wave direction
- \(\psi\) :
-
Ship heading
- \(\nabla\) :
-
Displacement volume of the ship
References
Sezaki Y (1980) Effects of the wind force to the speed of a car carrier. J Kansai Soc Naval Arch Japan 179:13–17 (in Japanese)
Yoshimura Y, Nagashima J (1985) Estimation of the manoeuvring behavior of ship in uniform wind. J Soc Naval Arch Japan 158:125–136 (in Japanese)
Hasegawa K, Kang DH, Sano M, Nagarajan V, Yamaguchi M (2006) A study on improving the course-keeping of a pure car carrier in windy conditions. J Mar Sci Technol 11(2):76–87
Nagarajan V, Kang DH, Hasegawa K, Nabeshima K (2008) Comparison of the mariner schilling rudder and the mariner rudder for VLCCs in strong winds. J Mar Sci Technol 13(1):24–39
Yasukawa H, Zaky M, Yonemasu I, Miyake R (2017) Effect of engine output on maneuverability of a VLCC in still water and adverse weather conditions. J Mar Sci Technol 22(3):574–586
Eda H (1968) Low-speed controllability of ships in wind. J Ship Res 12(3):181–200
Ogawa A (1969) Calculation on the steered motion of a ship under the action of external forces(1). J Soc Naval Arch Japan 126:107–120 (in Japanese)
Ogawa A, Koyama T, Kijima K (1977) MMG report-I, on the mathematical model of ship manoeuvring. Bull Soc Naval Arch Japan 575:22–28 (in Japanese)
Ishibashi K (1975) On course stability and manoeuverable range of wind velocity in the uniform wind. J Soc Naval Arch Japan 138:165–177 (in Japanese)
Tanaka A, Yamagami Y, Yamashita Y, Misumi E (1980) The ship manoevrbility in strong wind. J Kansai Soc Naval Arch Japan 176:1–10 (in Japanese)
Martin LL (1980) Ship maneuvering and control in wind. SNAME Trans 88:257–281
Hirano M, Takashina J, Moriya S (1984) Ship maneuverability in wind. J Soc Naval Arch Japan 155:122–131 (in Japanese)
Eda H (1980) Rolling and steering performance of high speed ships. In: Proceedings of the 13th Symposium on Naval Hydrodynamics, Tokyo, pp 427–439
Hirano M, Takashina J (1980) A calculation of ship turning motion taking coupling effect due to heel into consideration. Trans West-Japan Soc Naval Arch 59:71–81
Son K, Nomoto K (1981) On the coupled motion of steering and rolling of a high speed container ship. J Soc Naval Arch Japan 150:232–244 (in Japanese)
Yasukawa H, Yoshimura Y (2014) Roll-coupling effect on ship maneuverability. Ship Technol Res 61(1):16–32
Yasukawa H, Sakuno R, Yoshimura Y (2019) Practical maneuvering simulation method of ships considering the roll-coupling effect. J Mar Sci Technol (in press)
Kadomatsu K, Inoue Y, Takarada N (1990) On the required minimum output of main propulsion engine for large fat ship with considering manoeuverability in Rough Seas. J Soc Naval Arch Japan 168:171–182 (in Japanese)
Spyrou K (1995) Yaw stability of ships in steady wind. Ship Technol Res 42:21–30
Naito S, Takagishi K (1998) Time mean behavior of large full ships in the sea. J Kansai Soc Naval Arch Japan 229:57–68 (in Japanese)
Fujiwara T, Ueno M, Ikeda Y (2005) Cruising performance of ships with large superstructures in heavy sea—1st report: added resistance induced by wind-. J Japan Soc Naval Arch Ocean Eng 2:257–269 (in Japanese)
Fujiwara T, Ueno M, Ikeda Y (2006) Cruising performance of ships with large superstructures in heavy sea—2nd report: added resistance induced by wind and waves, and optimum ship routing-. J Japan Soc Naval Arch Ocean Eng 3:147–155 (in Japanese)
Umeda N, Kawaida D, Ooiwa S, Matsuda A, Terada D (2016) Tank test results and simulations in adverse weather conditions, Symp. Minimum Engine Power Requirement of Ships, Japan Institute of Navigation, Japan Society of Naval Architects and Ocean Engineers, Tokyo, pp 51–56 (in Japanese)
Asai S (1981) A study on check Helms for course keeping of a ship under steady external forces. J Soc Naval Arch Japan 150:245–253
Yasukawa H, Hirono T, Nakayama Y, Koh KK (2012) Course stability and yaw motion of a ship in steady wind. J Mar Sci Technol 17(3):291–304
Yoshimura Y (1988) Mathematical model for manoeuvring ship motion in shallow water (2nd report),–mathematical model at slow forward speed. J Kansai Soc Naval Arch Japan 210:77–84 (in Japanese)
Yoshimura Y, Nakao I, Ishibashi A (2009) Unified mathematical model for ocean and harbour manoeuvring. In: Proc. MARSIM2009, pp M116–M124
Yasukawa H, Yoshimura Y (2015) Introduction of MMG standard method for ship maneuvering predictions. J Mar Sci Technol 20(1):37–52
Hamamoto M, Kim Y (1993) A new coordinate system and the equations describing manoeuvring motion of a ship in waves. J Soc Naval Arch Japan 173:209–220 (in Japanese)
Yoshimura Y (1984) Mathematical model for the manoeuvring ship motion in shallow water. J Kansai Soc Naval Arch Japan 200:41–51 (in Japanese)
Yasukawa H, Zaky M, Yamazaki Y, Amii H (2017) Maneuverability of \(C_{\text{b}}\)-series full hull ships (2nd report: maneuvering simulations). J Japan Soc Naval Arch Ocean Eng 26:63–70 (in Japanese)
Yasukawa H, Hirata N, Matsumoto A, Kuroiwa, Mizokami S (2019) Evaluations of wave-induced steady forces and turning motion of a full hull ship in waves. J Mar Sci Technol 24(1):1–15
Yasukawa H (2019) Maneuvering hydrodynamic derivatives and course stability of a ship close to bank. In: Proceedings of the 5th international conference on ship manoeuvring in shallow and confined water: manoeuvring in waves, wind, current, ostend, belgium (to be presented)
Fujiwara T, Ueno M, Nimura T (1998) Estimation of wind forces and moments acting on ships. J Soc Naval Arch Japan 183:77–90 (in Japanese)
Spyrou KJ, Tigkas I, Chatzis A (2007) Dynamics of a ship steering in wind revisited. J Ship Res 51(2):160–173
Zaky M, Sano M, Yasukawa H (2019) Improvement of maneuverability in a VLCC by a high lift rudder. Ocean Eng (in press)
Acknowledgements
This study was supported by JSPS KAKENHI Grant number JP26249135. The authors express their sincere gratitude to Ms. A. Nishiyama for her assistance with the calculations of the SSC and the CS under external disturbances.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
About this article

Cite this article
Yasukawa, H., Sakuno, R. Application of the MMG method for the prediction of steady sailing condition and course stability of a ship under external disturbances. J Mar Sci Technol 25, 196–220 (2020). https://doi.org/10.1007/s00773-019-00641-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-019-00641-4