
Abstract
We consider the problem of modelling nanobeams that dissipate thermal energy by radiation. We approach such a problem in a one-dimensional case by discussing the behavior of nonlocal nanobeams based on the Euler–Bernoulli assumptions. With these premises, we propose a thermoelastic model that takes into account the effects of thermal energy radiation to the external environment, employing an extension of the type II Green–Naghdi (GN-II) theory. We also deepen the formulated theoretical model making use of wave-form solutions, to highlight the presence of dissipative effects.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Nanotechnologies are receiving increasing attention from researchers in different fields, such as nanoelectronics or nanomedicine. In fact, devices as charge detectors, biological tissues or electromechanical actuators are often fabricated with nanostructures [1]. To viably design any of these devices at nanoscale, it is essential to master an in-depth knowledge of the mechanical behavior of the nanostructures, defined as structures with at least one dimension between 1 and 100 nm. These materials are classified as: zero dimensional (0D), where all dimensions are at nanoscale (e.g. nanoparticles); one dimensional (1D), where two dimensions are at nanoscale (e.g. nanobeams); two dimensional (2D), where only one dimension is at nanoscale (e.g. nanolayers); three dimensional (3D) nanomaterials, made of a multiple arrangement of nanosized crystals in different orientations. It is worth noting that, since the discovery of carbon nanotubes (CNTs) by Iijima [2], great attention has been given to the study of the mechanics of the nanobeams [3,4,5]. Due to the difficulty of conducting experiments or numerical simulations at the nanoscale, the theoretical study of such structures is crucial.
It is important to point out that the principles of mechanics usually applied at the macroscale are not appropriate to describe the mechanics of nanostructures, as these neglect some elements that are significant at the nanoscale (e.g. van der Waals forces, temperature scale effects). To catch size effects that arise in nanomaterials, different approaches have been proposed, both atomistic and referred to various high-order continuum theories. Among the former, the nonlocal elasticity theory proposed by Eringen [6] is widely used to describe the mechanical behavior of nanostructures. This theory defines the stress in a reference point of the continuum as a function of the states of deformation of all points of the body, instead of being only a function of the strains at that point.
In the literature, there are many authors who have applied and extended this nonlocal theory. Nonlocal elasticity theories alternative to the Eringen’s one have been also formulated (e.g. [7] and [8] illustrate different models of non-local bars). In 2003, Peddieson et al. [9] extended the Bernoulli/Euler beam model to include a nonlocal elastic material response.
The dynamic problems of Bernoulli-Euler beams have been also discussed analytically by considering the modified couple stress theory in [10]. Timoshenko beam models have been also applied to formulate a microstructure-dependent theory or to investigate the vibrational behavior of microbeams [9, 11, 12].
In 2009, Aydogdu [13] applied the general nonlocal beam theory to nanobeam bending, buckling and vibration.
Non-classical models to investigate on the vibration of these structures are also presented in [14] and [15]. An exact approach to the dynamics of small-size frames/trusses has been recently presented in [16].
In 2011, Ansari et al. [17] investigated the vibrational behavior of microbeams made of functionally graded materials based on the strain gradient Timoshenko beam theory. A stress-driven integral model has also been evaluated in [18]. A nonlocal model to study the size-dependent free transverse vibrations of nanobeams with arbitrary numbers of cracks was formulated in 2022 [19].
As mentioned above, nanostructures are also very susceptible to the temperature of the surrounding environment. When these structures are exposed to an environment with specific thermal features, the thermal stress that is generated in the structures can cause bending phenomena. Some studies have been conducted on the effects of temperature on the mechanical response of nanostructures, by considering the thermo-bending and dynamic response of such structures [20, 21]. A consistent stress-driven nonlocal integral model for nanobeam mechanics in a nonisothermal regime has been presented in [22]. In 2021, Zhao et al. [23] analytically investigated the coupled thermoelastic forced vibration and the heat transfer process of an axially moving micro/nanobeam. The authors applied the Eringen nonlocal elasticity theory to their Euler–Bernoulli beam model. The heat transfer of the nanobeam was defined by employing the type III Green–Naghdi (GN-III) theory (in [23], reference is made to [24]).
The aim of this work is to investigate the thermoelastic response of a nanobeam modeled with the classical Euler–Bernoulli theory, under suitable heat exchange assumptions. The Eringen nonlocal elasticity theory is employed to derive the equation of motion of the beam. An extension of the type II Green–Naghdi (GN-II) thermoelasticity theory [25] that accounts for the effects of radiation of thermal energy to the external environment [26] is used to model the heat transfer processes.
It is worth mentioning that the (thermoelastic) GN-II theory, almost universally identified with the label "without energy dissipation" [25] includes a thermal displacement gradient among the independent constitutive variables and, in contrast to the classic entropy inequality, relies on an entropy balance equation. The use of this thermomechanical model (without or, as in the present case, with energy dissipation) allows the activation of the second-sound phenomenon, i.e. the possibility for the thermal energy to be transmitted through waves with finite speed. It is well known that this kind of evolution of the thermal signal is able to capture effects related to ultra-fast transients much better than what predicted by models of diffusive type (based, e.g., on the Fourier’s law). The GN-III theory of thermoelasticity was formulated instead in [27]; The main difference between type II and type III theories lies in the constitutive dependence, since GN-III also considers the temperature gradient. In general, it can be said that the GN-III theory contains GN-II as a limiting case. For a concise but, at the same time, exhaustive discussion (also referred to the non-linear cases) the reader is referred to [28] (Sect. 2.3 for Type II theory; Sect. 2.4 for Type III theory). The introduced theoretical model is formulated considering its potential applications in many engineering fields, such as industrial or biomedical. For example, it could be applied in industrial engineering to design precision devices, such as nanosensors and nanoscopes, subjected to different thermal load conditions.
This paper is organized as follows. The formulated thermoelastic theory is illustrated in Sect. 2, and a related application which involves the use of wave-form solutions is illustrated in Sect. 3. In particular, we demonstrate that the radiating feature of the nanobeam results in the appearance of a damping term in the corresponding solutions. Concluding remarks and directions for future works are discussed in Sect. 4.
2 Mathematical description of the thermoelastic model
The present section is related to the theoretical development of the proposed model. As it is well known, Eringen’s nonlocal elasticity theory [29] accounts for scale effects, typical of the structures that concern our study. Based on this theory, the constitutive equation for Euler–Bernoulli nanobeamsFootnote 1 can be written as follows [30]:
where \(\sigma \) is the nonlocal axial stress, \(\varepsilon \) is the axial strain and E is the Young modulus. In the above relation, furthermore, \(e_{0}\) represents a dimensionless material constant, a is the internal characteristic length, and their product, \(e_{0}a\), is the so-called small-scale parameter. By the product \(E \varepsilon \) we denote the classical local axial stress \(\sigma ^{loc}\) in the isotropic case.
On the other side, it is well known from the linear theory of the thermoelasticity that, as for the most general—anisotropic—local stress tensor \(\sigma ^{loc}_{ij}\), the constitutive equation for a 3D continuum body assumes the following form:
where \(E_{ijhk}\) is the elastic tensor, \(\varepsilon _{hk}\) is the strain tensor, \(\alpha _{hk}^T\) is the thermal expansion tensor, and \(\vartheta (=T-T_0)\) is the temperature variation with respect to a constant reference temperature \(T_0\).
The constitutive relationship (Eq. 2) that links stress, strain, elasticity and thermal expansion tensors with the temperature variation is assumed in a classical way according to the linear theory of thermoelasticity: in this regard, reference can be made, e.g., to [31] (Sect. 1.1.1). Equation (3) is derived from it, under the Euler–Bernoulli assumptions.
Resorting to the usual convention, lowercase subscripts are here understood to range over the integers (1, 2, 3) and summation over repeated subscripts is implied. Under the Euler–Bernoulli assumptions, the thermoelastic local stress reduces then to:
where \(\alpha ^T\) is the (assumed constant) thermal expansion coefficient and so the product \(\alpha ^T \vartheta \) represents the thermal strain.
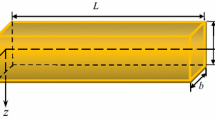
Let us consider for our nanobeam a classic geometry illustrated in Fig. 1 and assume that, as for the temperature \(\vartheta \), it obeys a law of the type
which seems fully consistent—in terms of functional dependence on the spatial variables x and z—with the Euler–Bernoulli assumptions.

Euler–Bernoulli nanobeam of length L and cross-sectional dimensions \(b \times h\)
The expression selected for \(\vartheta \left( x,z,t\right) \) guarantees that, for each cross-section (i.e., orthogonal to the x axis), the temperature of the beam is equal to the reference temperature \(T_{0}\) at the lower edge (i.e., at \(z=-h/2\)) and, assuming \(\varphi \left( x,t\right) >0\) for any value of the independent variables, it increases as z increases.
From Eqs. (1–4), the following relation for the Euler–Bernoulli nonlocal axial stress \(\sigma \left( x,z,t\right) \) can be deduced:
where, from now and for the rest of the work, each lowercase subscript indicates a partial derivative with respect to the corresponding independent variable, and the involved functions are meant to be sufficiently smooth for our purposes. According to, e.g., [30, 32], the following relation has been used for the Euler–Bernoulli axial strain \(\varepsilon \left( x,z,t\right) \):
being \(w\left( x,t\right) \) the transverse displacement.
Now, let us assume (see again, for instance, [30]) a classical equation of motion for an Euler–Bernoulli beam with nonlocal effects and without external excitation forces:
where \(\rho \) is the mass density of the beam, A is its cross-sectional area (both assumed constant), and so the product \(\rho A\) stands for the mass per unit length of the beam. Moreover, the nonlocal bending moment \(M\left( x,t\right) \) can be defined as follows:
Following a procedure similar to that illustrated in [23], we multiply Eq. (5) by z and then integrate it in dz over the interval \(\left[ -h/2,h/2\right] \), obtaining:
Recalling the def. (8) and noting that \( {\displaystyle \int _{-h/2}^{h/2}} z^{2}dz=\dfrac{h^{3}}{12}=\dfrac{I}{b}\) (being I the area moment of inertia), through simple integrations by parts it is possible to rewrite Eq. (9) as follows:
the product EI representing the bending stiffness of the beam and once the geometric parameter \(J=24I/\left( h\pi ^{2}\right) \) (dimensionally, \(m^{3}\)) has been defined.
By replacing the equation of motion (7) in (10) and deriving twice with respect to x, one gets the following expression for \(M_{xx}\left( x,t\right) \):
which, in turn replaced into Eq. (7), returns the following fourth-order partial differential equationFootnote 2:
As for the modeling of thermal energy transfer—which introduces, to the best of the authors’ knowledge, an element of novelty with regard to the existing literature—we refer to the extended type II thermoelastic theory by Green and Naghdi [25] accounting for a radiating effect, as in [26]. To this end, we complement the equations previously used with the following:
In the above relation, c is the (supposed constant) specific heat, \(\varepsilon \left( x,z,t\right) \)—we recall—stands for the Euler–Bernoulli axial strain, \(\kappa ^{*}\) is a theory-specific parameter [25] with dimensions of \(J/\left( ms^{2}K\right) \) and, for the time derivative of the external rate of heat supply per unit mass \(r_{t}\left( x,z,t\right) \), we select the following expression:
i.e. we admit that the beam can radiate thermal energy towards the surrounding environment, in accordance with the (linearized version of the) Stefan–Boltzmann (SB) law. In Eq. (14) we mean \(\gamma =\varpi \,\xi _{SB}P\left( \rho A\right) ^{-1}\), being \(\varpi \) the emissivity of the medium, \(\xi _{SB}\) the SB constant (\(\approx 5.67\times 10^{-8}\left( W/m^{2}\right) K^{-4}\)) and P the cross-sectional perimeter of the beam.
Substituting in Eq. (13) the expression (4) for \(\vartheta \left( x,z,t\right) \), (6) for the axial strain \(\varepsilon \left( x,z,t\right) \) and (14) for \(r_{t}\left( x,z,t\right) \), through straightforward calculations we arrive at
As already done for Eq. (5), we multiply Eq. (15) by z and then integrate it in dz over the interval \(\left[ -h/2,h/2\right] \), obtaining:
Further integrations by parts, along with appropriate manipulations allow us to rewrite Eq. (16) in the form:
Together with Eq. (12), Eq. (17) defines our coupled thermoelastic system for radiating nanobeams under nonlocal Euler–Bernoulli and extended GN-II theories.
3 Wave-form solutions exhibiting damping
The purpose of this section is to show that, assuming wave-form expressions for the unknown fields \(w\left( x,t\right) \) and \(\varphi \left( x,t\right) \), the radiating effect that characterizes the nanobeam results in the appearance of a damping term in the corresponding solutions. To achieve this goal, we refer to the Eqs. (12) and (17) (in dimensional form) that define our model, and introduce the following dimensionless quantities:
where L is assumed to be the size of the nanobeam in the x direction (i.e., the external length scale parameter) and \(t_{0}=L\sqrt{\rho /E}\).
Through appropriate manipulations and straightforward calculations, which we omit for reasons of synthesis, we arrive at the following dimensionless counterparts of the Eqs. (12) and (17):
where the dimensionless parameters \(A_{1}, \ ... \ A_{4}\), \(B_{1}, \ ... \ B_{5}\) are defined as follows:
Remaining in a dimensionless context, we assume a wave-form expression for the unknown fields:
being \(\textrm{W}\), \(\mathrm {\Phi }\) the (dimensionless and real) amplitudes, k the (dimensionless and real) wave number and \(\omega \) the (dimensionless and, in general, complex) angular frequency. By replacing the above expressions in the Eqs. (18) and (19) we get the following linear homogeneous algebraic system:
in the unknowns \(\textrm{W}\) and \(\mathrm {\Phi }\). To get non-trivial solutions, we impose the determinant of the coefficients matrix equal to zero, thus obtaining the following dispersion relation:
a fourth degree polynomial equation in \(\omega \), from which we can derive \(\omega \) as a function of k. It is worth highlighting that the parameter \(B_{4}\), the only one in which the coefficient \(\gamma \)–connected to the radiating effect—is present, determines the presence of the odd powers of \(\omega \). In the event that such an effect is absent (i.e., \(\gamma =B_{4}=0\)), the dispersion relation degenerates into a classic biquadratic equation, characteristic of the GN-II theory actually without energy dissipation.
Given the complexity of the dispersion equation in its most general form (20), we opt for a numerical approach able to highlight the presence of the dissipative effect. To do this, let us consider a nanobeam made of stainless steel (see azom.com for reference), with the following features: \(L=100 \, nm\), \(b=10 \, nm\), \(h=5 \, nm\); \(e_{0}a=\tau L\), being \(\tau \) (assumed, for the moment, equal to 0.2) the nonlocal parameter, \(\rho =7.96\times 10^{3} \, kg/m^{3}\), \(E=196.5 \, GPa\), \(T_{0}=293 \, K\), \(\alpha ^T =17\times 10^{-6} \, K^{-1}\), \(c=510 \, J/\left( kg \, K\right) \). Being interested in bringing out the dissipation effect, we assume a unit value for the theory-specific parameter \(\kappa ^{*}\) (although it means, at least dimensionally, a thermal conductivity over time) as well as, for the moment, an emissivity \(\varpi \) equal to 0.5. Moreover, we take into account waves with assigned wavelength (see [33], p. 280), and thus set also for k—at least for now—a unit value. As expected, the dispersion Eq. (20) (with radiating effect) returns two complex admissible solutions, namely \(\omega _{1}=6.2644104\times 10^{-6}-4.2253\times 10^{-9}i\) and \(\omega _{2}=0.0141824 - 1.7318\times 10^{-11} i\); in contrast, setting \(\gamma =B_{4}=0\), the admissible solutions of the dispersion equation without odd powers of \(\omega \) are \(\omega _{1}=6.2644118\times 10^{-6}\) and \(\omega _{2}=0.0141824\). The effect deriving from the insertion of the term \(\gamma \) is twofold: on the one hand it determines a very slight decrease in the real part of \(\omega \) (as for the second admissible solution, it appears in correspondence with the \(17^{th}\) decimal digit), and thus a very slight reduction of the corresponding wave speed \({\text {Re}}\left( \omega \right) /k\); on the other hand, it lets a not null (precisely, strictly negative) imaginary part of \(\omega \) emerge, which results in the appearance of a damping factor over time proportional to \(\exp \left[ {\text {Im}}\left( \omega \right) \textrm{t}\right] \).
For completeness of information, in further parametric investigations (the results of which are reported in Tables 1 and 2), we consider different values of the nonlocal parameter \(\tau \) and of the emissivity \(\varpi \), i.e. of the coefficient \(\gamma \) related to the radiating effect. The main features that can be highlighted are the following: while the increase of \(\tau \) or \(\varpi \) (i.e., \(\gamma \)) is always accompanied by a reduction of the real parts Re \((\omega _1)\) and Re \((\omega _2)\), that is a reduction of the corresponding wave speed Re \((\omega )\)/k, the situation becomes more complex if we take into account the imaginary parts Im \((\omega _1)\) and Im \((\omega _2)\), linked—we remember—to the damping factor over time proportional to exp [Im \((\omega )\) t]. In fact, as the emissivity \(\varpi \) increases, both admissible solutions become dampened with greater strength (and this is certainly an expected result); conversely, as the nonlocal parameter \(\tau \) increases, it is interesting to note a sort of “compensation” between the imaginary parts of \(\omega _1\) and \(\omega _2\), which tend to increase and decrease, respectively.
We subsequently consider k variable (see Fig. 2) and focus our attention, by way of example, on the solution \(\omega _{2}\): the reduction of the corresponding wave speed \({\text {Re}}\left( \omega _{2}\right) /k\) is easily detectable as the value of k increases, passing from case without energy dissipation to the damped model.
All the simulations were carried out using the software Wolfram Mathematica.

Wave speed (\({\text {Re}}\,(\omega _{2})/k\)) vs. wave number (k) without and with energy dissipation (solid black curve and dashed red curve, respectively) (Color figure online)
4 Concluding remarks
We have presented a thermoelastic theoretical model that accounts for scale effects typical of nanostructures, as well as thermal energy radiation effects towards the external environment; specifically, we considered radiating deformable nanobeams. The Eringen nonlocal elasticity theory was applied to the Euler–Bernoulli beam model to take into account the dimensions of the analyzed structures. As for the thermal aspect, the heat exchange processes were defined for the nanobeam by employing an extension of the type II Green–Naghdi (GN-II) theory [25, 26]. Such a theory [26] extends the concept of thermoelasticity without energy dissipation and discusses the form of the external rate of heat supply, by including the radiation effect of thermal energy towards the external environment. The joint use of these theories has led to the formulation of a coupled thermoelastic model capable of adequately representing the behavior of the analyzed structures. Some applications showing the dissipation effect have also been proposed.
Results illustrated in Sect. 3 show that the radiating effects (introduced with the \(\gamma \) term different from zero) result in damped thermoelastic waves. The corresponding dispersion relation shows a decrease in the speed of the wave, as well as the appearance of a damping term in the solutions of the problem. As mentioned above, the formulated model could be addressed to all the precision devices used in industrial, electronic or biomedical engineering (e.g. nanosensors), where the effect of temperature on the mechanics of the micro/nano-device is non-negligible.
Future extensions of this work will be the generalization of the proposed theory, taking into account the presence of external excitation forces, rather than a comparison with alternative heat exchange mechanisms, starting from the Fourier’s law.
Notes
As clearly specified in [22], under the Euler–Bernoulli assumptions only normal stresses directed along the “x” axis exist, and these will be denoted by \(\sigma \).
References
Muhammad, R., Muhammad, B.T., Muhammad, S.R., Neelam, S., Rabia, T.: Chapter 2: Nanostructure materials and their classification by dimensionality, Editor(s): Muhammad B.T., Muhammad R., Muhammad S.R., In Micro and Nano Technologies Series, Nanotechnology and Photocatalysis for Environmental Applications, Elsevier, pp. 27–44 (2020)
Iijima, S.: Helical microtubules of graphitic carbon. Nature 354(6348), 56–58 (1991). https://doi.org/10.1038/354056a0
Raney, J.R., Fraternali, F., Amendola, A., Daraio, C.: Modeling and in situ identification of material parameters for layered structures based on carbon nanotube arrays. Compos. Struct. 93(11), 3013–3018 (2011). https://doi.org/10.1016/j.compstruct.2011.04.034
Blesgen, T., Fraternali, F., Raney, J.R., Amendola, A., Daraio, C.: Continuum limits of bistable spring models of carbon nanotube arrays accounting for material damage. Mech. Res. Commun. 45, 58–63 (2012). https://doi.org/10.1016/j.mechrescom.2012.07.006
Ghadiri, M., Safi, M.: Nonlinear vibration analysis of functionally graded nanobeam using homotopy perturbation method. Adv. Appl. Math. Mech. 9(1), 144–156 (2017). https://doi.org/10.4208/aamm.2015.m899
Eringen, A.C.: Nonlocal polar elastic continua. Int. J. Eng. Sci. 10(1), 1–16 (1972). https://doi.org/10.1016/0020-7225(72)90070-5
Failla, G., Santini, A., Zingales, M.: Solution strategies for 1D elastic continuum with long-range interactions: smooth and fractional decay. Mech. Res. Commun. 37(1), 13–21 (2010). https://doi.org/10.1016/j.mechrescom.2009.09.006
Lim, C.W.: On the truth of nanoscale for nanobeams based on nonlocal elastic stress field theory: equilibrium, governing equation and static deflection. Appl. Math. Mech. (English Edition) 31(1), 37–54 (2010). https://doi.org/10.1007/s10483-010-0105-7
Peddieson, J., Buchanan, G.R., McNitt, R.P.: Application of nonlocal continuum models to nanotechnology. Int. J. Eng. Sci. 41(3–5), 305–312 (2003). https://doi.org/10.1016/S0020-7225(02)00210-0
Kong, S., Zhou, S., Nie, Z., Wang, K.: The size-dependent natural frequency of Bernoulli-Euler micro-beams. Int. J. Eng. Sci. 46(5), 427–437 (2008). https://doi.org/10.1016/j.ijengsci.2007.10.002
Wang, B., Zhao, J., Zhou, S.: A micro scale Timoshenko beam model based on strain gradient elasticity theory. Eur. J. Mech. A/Solids 29(4), 591–599 (2010). https://doi.org/10.1016/j.euromechsol.2009.12.005
Ma, H.M., Gao, X.-L., Reddy, J.N.: A microstructure-dependent Timoshenko beam model based on a modified couple stress theory. J. Mech. Phys. Solids 56(12), 3379–3391 (2008). https://doi.org/10.1016/j.jmps.2008.09.007
Aydogdu, M.: A general nonlocal beam theory: its application to nanobeam bending, buckling and vibration. Phys. E: Low-Dimens. Syst. Nanostruct. 41(9), 1651–1655 (2009). https://doi.org/10.1016/j.physe.2009.05.014
Zhang, Y.Y., Wang, C.M., Challamel, N.: Bending, buckling, and vibration of micro/nanobeams by hybrid nonlocal beam model. J. Eng. Mech. 136(5), 562–574 (2010). https://doi.org/10.1061/(ASCE)EM.1943-7889.0000107
Yang, Y., Lim, C.W.: Non-classical stiffness strengthening size effects for free vibration of a nonlocal nanostructure. Int. J. Mech. Sci. 54(1), 57–68 (2012). https://doi.org/10.1016/j.ijmecsci.2011.09.007
Russillo, A.F., Failla, G., Alotta, G., Marotti de Sciarra, F., Barretta, R.: On the dynamics of nano-frames. Int. J. Eng. Sci. 160, 103433 (2021). https://doi.org/10.1016/j.ijengsci.2020.103433
Ansari, R., Gholami, R., Sahmani, S.: Free vibration analysis of size-dependent functionally graded microbeams based on the strain gradient Timoshenko beam theory. Compos. Struct. 94(1), 221–228 (2011). https://doi.org/10.1016/j.compstruct.2011.06.024
Romano, G., Barretta, R.: Nonlocal elasticity in nanobeams: the stress-driven integral model. Int. J. Eng. Sci. 115, 14–27 (2017). https://doi.org/10.1016/j.ijengsci.2017.03.002
Darban, H., Luciano, R., Basista, M.: Free transverse vibrations of nanobeams with multiple cracks. Int. J. Eng. Sci. 177, 103703 (2022). https://doi.org/10.1016/j.ijengsci.2022.103703
Canadija, M., Barretta, R., Marotti de Sciarra, F.: On functionally graded Timoshenko nonisothermal nanobeams. Compos. Struct. 135, 286–296 (2016). https://doi.org/10.1016/j.compstruct.2015.09.030
Zenkour, A., Abouelregal, A., Alnefaie, K., Abu-Hamdeh, N., Aifantis, E.: A refined nonlocal thermoelasticity theory for the vibration of nanobeams induced by ramp-type heating. Appl. Math. Comput. 248, 169–183 (2014). https://doi.org/10.1016/j.amc.2014.09.075
Barretta, R., Canadija, M., Luciano, R., Marotti de Sciarra, F.: Stress-driven modeling of nonlocal thermoelastic behavior of nanobeams. Int. J. Eng. Sci. 126, 53–67 (2018). https://doi.org/10.1016/j.ijengsci.2018.02.012
Zhao, X., Wang, C.F., Zhu, W.D., Li, Y.H., Wan, X.S.: Cupled thermoelastic nonlocal forced vibration of an axially moving micro/nano-beam. Int. J. Mech. Sci. 206, 106600 (2021). https://doi.org/10.1016/j.ijmecsci.2021.106600
Green, A.E., Naghdi, P.M.: A re-examination of the basic postulates of thermomechanics. Proc. R. Soc. A 432, 171–194 (1991). https://doi.org/10.1098/rspa.1991.0012
Green, A.E., Naghdi, P.M.: Thermoelasticity without energy dissipation. J. Elast. 31, 189–208 (1993). https://doi.org/10.1007/BF00044969
Zampoli, V.: Singular surfaces in long, thin radiating rods under Green and Naghdi’s type II theory of thermoelasticity. Int. J. Eng. Sci. 168, 103558 (2021). https://doi.org/10.1016/j.ijengsci.2021.103558
Green, A.E., Naghdi, P.M.: On undamped heat waves in an elastic solid. J. Thermal Stress. 15(2), 253–264 (1992). https://doi.org/10.1080/01495739208946136
Straughan, B.: Heat waves, Springer Series in Applied Mathematical Sciences (2011)
Eringen, A.C.: Nonlocal continuum field theories. Springer Science and Business Media, New York (2002)
Civalek, O., Demir, C.: Bending analysis of microtubules using nonlocal Euler-Bernoulli beam theory. Appl. Math. Modell. 35(5), 2053–2067 (2011). https://doi.org/10.1016/j.apm.2010.11.004
Ignaczak, J., Ostoja-Starzewski, M.: Thermoelasticity with Finite Wave Speeds. Oxford University Press (2010)
Manoli, C.K., Papatzani, S., Mouzakis, D.E.: Exploring the limits of Euler-Bernoulli theory in micromechanics. Axioms 11(3), 142 (2022). https://doi.org/10.3390/axioms11030142
Chadwick, P.: Thermoelasticity. The dynamical theory. In Progress in Solid Mechanics, vol. 1. Amsterdam: North-Holland Publishing Company (1960)
de Borbon, F., Ambrosini, D.: Influence of the nonlocal parameter on the transverse vibration of double-walled carbon nanotubes. J. Mech. Behav. Mater. 24(3–4), 79–90 (2015). https://doi.org/10.1515/jmbm-2015-0010
Acknowledgements
AA and VZ acknowledge the GNFM (Italian National Group of Mathematical Physics, INdAM) for supporting their research activity. The authors are grateful to the anonymous reviewers for their useful comments and suggestions.
Funding
Open access funding provided by Università degli Studi di Salerno within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Amendola, A., Zampoli, V. & Luciano, R. Damped waves under nonlocal Euler–Bernoulli and extended Green–Naghdi II theories in radiating thermoelastic nanobeams. Acta Mech 234, 2077–2085 (2023). https://doi.org/10.1007/s00707-023-03478-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-023-03478-6