
Abstract
Aeroelastic systems can be subjected to a self-excited behavior and experience the so-called phenomenon of flutter. Under this condition, airfoils can exhibit self-sustained oscillations. Due to structural nonlinearities, the system’s response is characterized by limit cycle oscillations (LCOs). The high vibration levels can lead to fatigue and catastrophic failure, thereby justifying flutter suppression schemes. This work proposes an investigation about the bifurcation behavior induced by vibration absorbers known as Nonlinear Energy Sinks (NES) aiming to alleviate aeroelastic LCOs in pitch, plunge, and control surface typical section. Unsteady aerodynamic loads are modeled according to generalized Theodorsen and Wagner theories, represented in state space. Pitching hardening nonlinearity is included in the model. A conventional NES approach is considered, in which a pure cubic stiffness spring is adopted. A combined methodology based on multiple scales and harmonic balance perturbation methods is used to build analytical solutions to characterize the dynamics of the aeroelastic system under the influence of NES. After a numerical validation of the analytical approach, the different response regimes and respective boundaries induced by NES are characterized based on the bifurcations of the aeroelastic system. A thorough analysis of the Target Energy Transfer (TET) phenomenon is also performed, and its relationship with response types induced by NES is discovered. Lastly, a characterization of the Slow Invariant Manifold in terms of the aeroelastic critical mode and NES motion is presented, and its significant features are discussed. Parametric studies are carried out based on both bifurcation and TET analyses to access the effect of NES parameters on the aeroelastic system dynamics aiming for a future investigation by employing an optimization process in the NES design.























Similar content being viewed by others

References
Al-Shudeifat, M.A.: Highly efficient nonlinear energy sink. Nonlinear Dyn. 76(4), 1905–1920 (2014). https://doi.org/10.1007/s11071-014-1256-x
Bergeot, B., Bellizzi, S.: Steady-state regimes prediction of a multi-degree-of-freedom unstable dynamical system coupled to a set of nonlinear energy sinks. Mech. Syst. Signal Process. 131, 728–750 (2019). https://doi.org/10.1016/j.ymssp.2019.05.045
Bichiou, Y., Hajj, M.R., Nayfeh, A.H.: Effectiveness of a nonlinear energy sink in the control of an aeroelastic system. Nonlinear Dyn. 86(4), 2161–2177 (2016). https://doi.org/10.1007/s11071-016-2922-y
Ding, H., Chen, L.Q.: Designs, analysis, and applications of nonlinear energy sinks. Nonlinear Dyn. 100, 3061–3107 (2020). https://doi.org/10.1007/s11071-020-05724-1
Dowell, E.H.: Aeroelastic control. In: A Modern Course in Aeroelasticity, pp. 531–584. Springer (2015). https://doi.org/10.1007/978-3-319-09453-3_12
Ebrahimzade, N., Dardel, M., Shafaghat, R.: Performance comparison of linear and nonlinear vibration absorbers in aeroelastic characteristics of a wing model. Nonlinear Dyn. 86(2), 1075–1094 (2016). https://doi.org/10.1007/s11071-016-2948-1
Fasihi, A., Shahgholi, M., Ghahremani, S.: The effects of nonlinear energy sink and piezoelectric energy harvester on aeroelastic instability of an airfoil. J. Vib. Control (2021). https://doi.org/10.1177/1077546321993585
Friedmann, P.P.: Renaissance of aeroelasticity and its future. J. Aircr. 36(1), 105–121 (1999). https://doi.org/10.2514/2.2418
Fung, Y.C.: An Introduction to the Theory of Aeroelasticity. Dover, New York (1995)
Guo, H., Cao, S., Yang, T., Chen, Y.: Aeroelastic suppression of an airfoil with control surface using nonlinear energy sink. Nonlinear Dyn. 94(2), 857–872 (2018). https://doi.org/10.1007/s11071-018-4398-4
Lee, Y.S., Kerschen, G., McFarland, D.M., Hill, W.J., Nichkawde, C., Strganac, T.W., Bergman, L.A., Vakakis, A.F.: Suppressing aeroelastic instability using broadband passive targeted energy transfers, Part 2: Experiments. AIAA J. 45(10), 2391–2400 (2007). https://doi.org/10.2514/1.28300
Lee, Y.S., Vakakis, A.F., Bergman, L.A., McFarland, D.M., Kerschen, G.: Suppression aeroelastic instability using broadband passive targeted energy transfers, Part 1: Theory. AIAA J. 45(3), 693–711 (2007). https://doi.org/10.2514/1.24062
Lee, Y.S., Vakakis, A.F., Bergman, L.A., McFarland, D.M., Kerschen, G.: Enhancing the robustness of aeroelastic instability suppression using multi-degree-of-freedom nonlinear energy sinks. AIAA J. 46(6), 1371–1394 (2008). https://doi.org/10.2514/1.30302
Lu, Z., Wang, Z., Zhou, Y., Lu, X.: Nonlinear dissipative devices in structural vibration control: a review. J. Sound Vib. 423, 18–49 (2018). https://doi.org/10.1016/j.jsv.2018.02.052
Luongo, A., Zulli, D.: Aeroelastic instability analysis of nes-controlled systems via a mixed multiple scale/harmonic balance algorithm. In: Proceedings of the MATEC Web of Conferences, vol. 1, p. 05003 (2012). https://doi.org/10.1051/matecconf/20120105003
Luongo, A., Zulli, D.: Aeroelastic instability analysis of NES-controlled systems via a mixed multiple scale/harmonic balance method. J. Vib. Control 20(13), 1985–1998 (2014). https://doi.org/10.1177/1077546313480542
Nayfeh, A.H.: Problems in Perturbation. Wiley, New York (1985)
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. Wiley, New York (1995)
Saeed, A.S., Al-Shudeifat, M.A., Vakakis, A.F.: Rotary-oscillatory nonlinear energy sink of robust performance. Int. J. Non-Linear Mech. 117, 103249 (2019). https://doi.org/10.1016/j.ijnonlinmec.2019.103249
Sanches, L., Guimarães, T.A.M., Marques, F.D.: Aeroelastic tailoring of nonlinear typical section using the method of multiple scales to predict post-flutter stable LCOs. Aerosp. Sci. Technol. 90, 157–168 (2019). https://doi.org/10.1016/j.ast.2019.04.031
Theodorsen, T.: General theory of aerodynamic instability and the mechanism of flutter. NACA Report 496 (1935)
Tsiatas, G.C., Charalampakis, A.E.: A new hysteretic nonlinear energy sink (HNES). Commun. Nonlinear Sci. Numer. Simul. 60, 1–11 (2018). https://doi.org/10.1016/j.cnsns.2017.12.014
Vasconcellos, R.M.G., Abdelkefi, A., Marques, F.D., Hajj, M.R.: Representation and analysis of control surface freeplay nonlinearity. J. Fluids Struct. 31, 79–91 (2012). https://doi.org/10.1016/j.jfluidstructs.2012.02.003
Acknowledgements
The authors are thankful for the financial support of the São Paulo Research Foundation—FAPESP, Brazil (Grants #2019/05410-9 and #2021/14813-0) and the Brazilian National Council for Scientific and Technological Development—CNPq, Brazil (Grant #306824/2019-1).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
The aeroelastic typical section with an NES: equations of motion
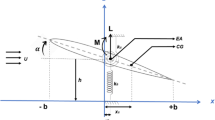
Admitting the system as illustrated in Fig. 1, the kinetic energy of the system can be expressed by:
where \({\mathcal {T}}_s\) and \({\mathcal {T}}_n\) are the kinetic energies of the airfoil with control surface and the NES, respectively, given by:
Similarly, the potential energy can be given by:
where \({\mathcal {V}}_s\) and \({\mathcal {V}}_n\) are the potential energies of the airfoil with control surface and the NES, respectively, given by:
Admitting no structural damping from the typical section, the work done by the damping forces corresponds only to the NES, i.e., \({\mathcal {B}} = {\mathcal {B}}_n\). From the Rayleigh function:
The Lagrange equations can be applied to the problem, resulting in:
where L, \(M_\alpha \), and \(M_\beta \) are the aerodynamic loading terms.
Introducing Eqs. (31)–(37) into Eqs. (38.1)–(38.4), the typical aeroelastic section with an NES equations of motion is:
Equations and formulae
1.1 Matrices from Eq. (7)
The total inertia, damping and stiffness matrices can be detailed as:
where the subscripts s and a are referred to structural and aerodynamic terms.
The structural matrices are:
The aerodynamic inertia matrix comprises the effects due to the non-circulatory flow around the airfoil and can be given as:
The aerodynamic damping and stiffness matrices regarding circulatory (c) and non-circulatory (nc) flow dynamics (\({\textbf{B}}_a = {\textbf{B}}_{nc} + {\textbf{B}}_{c}\) and \({\textbf{K}}_a = {\textbf{K}}_{nc} + {\textbf{K}}_{c}\)) are:
1.2 Theodorsen’s constants
The Theodorsen constants are [21]:
1.3 Matrices from Eq. (10)
The matrices from Eq. (10) are defined by:
where
and
and
where
1.4 Polynomial functions of Eq. (21)
The polynomial functions \({\mathcal {F}}_1(b)\) and \({\mathcal {F}}_2(b)\) of Eq. (21) are given by:
where
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
da Silva, J.A.I., Sanches, L. & Marques, F.D. Dynamic characterization of an aeroelastic typical section under nonlinear energy sink passive control by using multiple scales and harmonic balance methods. Acta Mech 234, 1571–1598 (2023). https://doi.org/10.1007/s00707-022-03457-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-022-03457-3