
Abstract
The Lott–Sturm–Villani curvature-dimension condition \(\textsf{CD}(K,N)\) provides a synthetic notion for a metric measure space to have curvature bounded from below by K and dimension bounded from above by N. It was proved by Juillet (Rev Mat Iberoam 37(1), 177–188, 2021) that a large class of sub-Riemannian manifolds do not satisfy the \(\textsf{CD}(K,N)\) condition, for any \(K\in {\mathbb {R}}\) and \(N\in (1,\infty )\). However, his result does not cover the case of almost-Riemannian manifolds. In this paper, we address the problem of disproving the \(\textsf{CD}\) condition in this setting, providing a new strategy which allows us to contradict the one-dimensional version of the \(\textsf{CD}\) condition. In particular, we prove that 2-dimensional almost-Riemannian manifolds and strongly regular almost-Riemannian manifolds do not satisfy the \(\textsf{CD}(K,N)\) condition for any \(K\in {\mathbb {R}}\) and \(N\in (1,\infty )\).
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In their seminal works Lott–Villani [20] and Sturm [28, 29] introduced a synthetic notion of curvature-dimension bounds, which is heavily based on the theory of Optimal Transport. They noticed that, in a Riemannian manifold, a uniform lower bound on the Ricci curvature, together with an upper bound on the dimension, is equivalent to a convexity property of the Rényi entropy functionals in the Wasserstein space. This allowed them to define a consistent notion of curvature-dimension bounds for metric measure spaces, known as \(\textsf{CD}\) condition. While in the Riemannian setting, the \(\textsf{CD}\) condition is equivalent to having bounded geometry, an analogue result does not hold in the sub-Riemannian setting. Sub-Riemannian geometry is a far-reaching generalization of Riemannian geometry: given a smooth manifold M, we define a smoothly varying scalar product only on a subset of horizontal directions \({\mathcal {D}}_p\subset T_pM\) (called distribution) at each point \(p\in M\). Under the so-called Hörmander condition, M is horizontally-path connected, and the usual length-minimization procedure yields a well-defined distance \({\textsf{d}}\). In particular, differently from what happens in Riemannian geometry, the rank of the distribution \(r(p)=\dim {\mathcal {D}}_p\) may be strictly less than the dimension of the manifold and may vary with the point. In general, we can not expect the \(\textsf{CD}\) condition to hold for truly sub-Riemannian manifolds. This statement is confirmed by the following result by Juillet.
Theorem 1.1
[19, Corrollary 1.2] Let M be a complete sub-Riemannian manifold with \( \dim M \ge 3\), equipped with a smooth positive (i.e. with strictly positive density) measure \({\mathfrak {m}}\). Assume that the possibly varying rank of the distribution is smaller than \(\dim M-1\). Then, \((M,{\textsf{d}},{\mathfrak {m}})\) does not satisfy the \(\textsf{CD}(K,N)\) condition for any \(K\in {\mathbb {R}}\) and \(N\in (1,\infty )\).
While this result is quite general, it does not include many cases of interest, such as almost-Riemannian geometry. Roughly speaking, an almost-Riemannian manifold is a sub-Riemannian manifold where the rank of the distribution coincides with the dimension of M, at almost every point.Footnote 1 For this reason, the technique used to prove Theorem 1.1 can not be adapted to this setting. Indeed, it relies on the construction of two Borel subsets for which the Brunn–Minkowski inequality does not hold, namely, for all \(R,\varepsilon >0\), one can find \(A,B\subset M\) such that \(\textrm{diam}(A\cup B)<R\), \({\mathfrak {m}}(A)\approx {\mathfrak {m}}(B)\), and such that there exists \(t\in (0,1)\) for which
where \(Z_t(A,B)\) denotes the t-intermediate set between A and B and \({\mathcal {N}}\) is the so-called geodesic dimension of M, see [26] or [2, Definition 5.47] for a precise definition. The inequality (1) allows to contradict the Brunn-Minkowski inequality if and only if the geodesic dimension \({\mathcal {N}}\) is strictly greater than \(\dim M\). However, in the almost-Riemannian setting, \({\mathcal {N}}=\dim M\) almost everywhere, making this construction inconclusive. We mention that Juillet [18] disproved the \(\textsf{CD}\) condition in the simple example of the standard Grushin plane (cf. Example 2.6) equipped with the Lebesgue measure, by direct computations. Heuristically, disproving the \(\textsf{CD}\) condition in almost-Riemannian manifolds is a more challenging task, since they behave in some sense like non-complete Riemannian manifolds. Thus, a new strategy is needed.
Our idea is to exploit the one-dimensional characterization of the \(\textsf{CD}\) condition:
proven by Cavalletti and Mondino [12], and contradict the \(\textsf{CD}^1(K,N)\) condition. For any 1-Lipschitz function u, the latter relies on a disintegration of the reference measure, associated with u, in one-dimensional transport rays and requires the \(\textsf{CD}(K,N)\) condition to hold along them. The main advantage in dealing with one-dimensional \(\textsf{CD}\) spaces is related to a differential characterization of the \(\textsf{CD}\) densities, (cf. Lemma 3.2), which is easier to disprove compared with the convexity of the Rényi entropy. In Sect. 3.2, we present a local version of the one-dimensional characterization (2) (cf. Proposition 3.7), which permits to exploit the local structure of sub-Riemannian manifolds. Then, in the case of an almost-Riemannian manifold, equipped with a smooth positive measure \({\mathfrak {m}}\), we are able to explicitly compute the disintegration and verify that the one-dimensional \(\textsf{CD}(K,N)\) condition along the rays does not hold for any \(K\in {\mathbb {R}}\) and \(N\in (1,\infty )\). Our main result is the following, cf. Theorems 5.4 and 6.3. We refer to Sects. 2 and 6 for precise definitions.
Theorem 1.2
Let M be a complete almost-Riemannian manifold and let \({\mathfrak {m}}\) be any smooth positive (i.e. with strictly positive density) measure on M. Assume M is either of dimension 2 or strongly regular. Then, the metric measure space \((M,{\textsf{d}},{\mathfrak {m}})\) does not satisfy the \(\textsf{CD}(K,N)\) condition for any \(K\in {\mathbb {R}}\) and \(N\in (1,+\infty )\).
Remarkably, for 2-dimensional almost-Riemannian manifolds, we do not require any additional assumption on the structure of the singular region \({\mathcal {Z}}\), see (4) for the precise definition. However, as soon as the dimension of the manifold increases, the complexity of the computations prevents us to treat the general case and we need an auxiliary control on the behavior of the distribution. Nonetheless, we stress that our procedure is algorithmic and can be applied to any explicit example of almost-Riemannian manifold. This algorithmic procedure has been implemented in the software Mathematica, see [23].
A crucial tool for proving Theorem 1.2 will be a truly sub-Riemannian phenomenon, namely the existence of characteristic points. For an embedded hypersurface \(\Sigma \subset M\), a characteristic point is a point where the distribution is tangent to \(\Sigma \). Of course, such points do not exist in Riemannian geometry, but as soon as the rank of the distribution \(r(p)<\dim M\) for some \(p\in M\), they can appear. Usually, characteristic points are source of subtle technical problems, mostly related to the low regularity of the (signed) distance \(\delta _\Sigma \) from \(\Sigma \). Indeed, although being 1-Lipschitz with respect to \({\textsf{d}}\), \(\delta _\Sigma \) is not smooth around characteristic points (and not even Lipschitz in coordinates). In the proof of Theorem 1.2, we choose a suitable hypersurface \(\Sigma \), we build the disintegration of \({\mathfrak {m}}\) associated with a localized version of \(\delta _\Sigma \) and we exploit its singular behavior to contradict the differential characterization of the one-dimensional \(\textsf{CD}(K,N)\) condition. In particular, \(\Sigma \) is chosen to be transverse to the singular region of M in such a way \(\Sigma \cap {\mathcal {Z}}\) exhibits characteristic points; we can then exploit the Riemannian structure at points of \(\Sigma \setminus {\mathcal {Z}}\) to describe the degeneration of \(\delta _\Sigma \) in the disintegration of \({\mathfrak {m}}\). For example, in the standard Grushin plane, where the singular region is \({\mathcal {Z}}=\{x=0\}\), a suitable transverse hypersurface is \(\Sigma =\{y=0\}\).
It is worth mentioning that there exists a weaker synthetic notion of curvature bounds, introduced by Ohta [24], called measure contraction property or \(\textsf{MCP}\) condition. This property seems to be more suited to sub-Riemannian geometry, see for example [7,8,9,10]. Finally, we refer to Milman [21] for a relaxation of the \(\textsf{CD}\) condition, called quasi-curvature-dimension condition, which holds for a certain class of sub-Riemannian manifolds. However, it is not known whether these weaker conditions hold for a general almost-Riemannian manifold.
After submitting this work, Rizzi and Stefani proved in [27] that every sub-Riemannian manifold does not satisfy the \(\textsf{CD}(K,\infty )\) condition, using different techniques.
2 Preliminaries
2.1 Almost-Riemannian geometry
We recall some basic facts about almost-Riemannian geometry, following [1].
Definition 2.1
Let M be a smooth, connected manifold. A sub-Riemannian structure on M is a triple \(({\mathbb {U}},\xi ,(\cdot |\cdot ))\) satisfying the following conditions:
-
(i)
\(\pi _{{\mathbb {U}}}:{\mathbb {U}}\rightarrow M\) is a Euclidean bundle of rank k with base M, namely for all \(p\in M\), the fiber \({\mathbb {U}}_p\) is a vector space equipped with a scalar product \((\cdot |\cdot )_p\), which depends smoothly on p;
-
(ii)
The map \(\xi :{\mathbb {U}}\rightarrow TM\) is a morphism of vector bundles, i.e. \(\xi \) is smooth and such that the following diagram commutes:

where \(\pi _M:TM\rightarrow M\) denotes the canonical projection of the tangent bundle.
-
(iii)
The distribution \({\mathcal {D}}=\{\xi (\sigma )\mid \sigma :M\rightarrow {\mathbb {U}} \text { smooth section}\}\subset TM\) satisfies the Hörmander condition (also known as bracket-generating condition), namely
$$\begin{aligned} \textrm{Lie}_p({\mathcal {D}})=T_pM,\quad \forall \,p\in M. \end{aligned}$$

With a slight abuse of notation, we say that M is a sub-Riemannian manifold.
Let \(({\mathbb {U}},\xi ,(\cdot |\cdot ))\) be a sub-Riemannian structure on M. We can define the sub-Riemannian norm on \({\mathcal {D}}\) as
The norm (3) is well-defined since the infimum is actually a minimum and it induces a scalar product \(g_p\) on \({\mathcal {D}}_p\) by polarization. Notice that different sub-Riemannian structures on M may define the same distributions and induced norms. This is the case for equivalent sub-Riemannian structures.
Definition 2.2
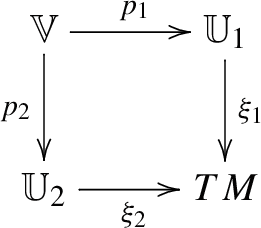
Let \(({\mathbb {U}}_1,\xi _1,(\cdot |\cdot )_1)\), \(({\mathbb {U}}_2,\xi _2,(\cdot |\cdot )_2)\) be two sub-Riemannian structures on M. These are said to be equivalent if the following conditions hold:
-
(i)
There exists a Euclidean bundle \(({\mathbb {V}},(\cdot |\cdot )_{\mathbb {V}})\) and two surjective bundle morphisms \(p_i:{\mathbb {V}}\rightarrow {\mathbb {U}}_i\) such that the following diagram is commutative
-
(ii)
The projections \(p_i\)’s are compatible with the scalar products defined on \({\mathbb {U}}_i\), namely
$$\begin{aligned} (u|u)_i=\min \{(v|v)_{\mathbb {V}}\mid p_i(v)=u\},\quad \forall \,u\in {\mathbb {U}}_i,\quad i=1,2. \end{aligned}$$

Definition 2.3
Let M be a sub-Riemannian manifold. The minimal bundle rank is the infimum of the rank of Euclidean bundles inducing equivalent structures on M. For \(p\in M\), the local minimal bundle rank of M at p is the minimal bundle rank of the structure when restricted to a sufficiently small neighborhood \({\mathcal {U}}_p\).
Definition 2.4
(Almost-Riemannian structure) Let M be a connected, smooth manifold of dimension \(n+1\) and let \(({\mathbb {U}},\xi ,(\cdot |\cdot ))\) be a sub-Riemannian structure on M. We say that M is an almost-Riemannian manifold if the local minimal bundle rank of the structure is \(n+1\).
We denote by \({\mathcal {Z}}\) the set of singular points, namely those points where the distribution has not full rank:
Notice that \({\mathcal {Z}}\) is closed, since the rank of the distribution is lower semi-continuous. We say that a point is Riemannian if it belongs to \(M\setminus {\mathcal {Z}}\).
Remark 2.5
If the singular set is empty, then the structure on M is Riemannian. Therefore, we will always tacitly assume that \({\mathcal {Z}}\ne \emptyset \).
A local orthonormal frame for the distribution is the image through \(\xi \) of a local orthonormal frame for \({\mathbb {U}}\). Consequently, by definition of almost-Riemannian manifold of dimension \(n+1\), it consists of exactly \(n+1\) vector fields which are linearly independent only at Riemannian points. In particular, local orthonormal frames are standard Riemannian orthonormal frames around Riemannian points.
Example 2.6
(Grushin plane) Let \(M={\mathbb {R}}^2\) and consider the sub-Riemannian structure given by \({\mathbb {U}}={\mathbb {R}}^2\times {\mathbb {R}}^2\) with the standard Euclidean scalar product on fibers and
As one can check, the resulting distribution is generated by the orthonormal vector fields \(X=\partial _x\), \(Y=x\partial _z\). The local minimal bundle rank is equal to 2, thus the structure is almost-Riemannian. In this case the singular region is \({\mathcal {Z}}=\{x=0\}\) and \(\{X,Y\}\) is a (global) orthonormal frame.
Remark 2.7
Any truly sub-Riemannian structure (meaning that is not Riemannian) of rank 2 on a 2-dimensional manifold is always almost-Riemannian, in the sense of Definition 2.4.
2.2 Almost-Riemannian distance
Let \(({\mathbb {U}},\xi ,(\cdot |\cdot ))\) be an almost-Riemannian structure on M. We say that \(\gamma : [0,T] \rightarrow M\) is a horizontal curve, if it is absolutely continuous and
This implies that there exists a measurable function \(u:[0,T]\rightarrow {\mathbb {U}}\), such that
Moreover, we have that \(u\in L^\infty ([0,T],{\mathbb {U}})\), see [1, Lemma 3.12], therefore the map \(t\mapsto \Vert \dot{\gamma }(t)\Vert \) is integrable on [0, T]. We define the length of a horizontal curve as follows:
The almost-Riemannian distance on M is defined, for any \(p,q\in M\), by
By Chow–Rashevskii theorem (see for example [5, Theorem 5.9]), the bracket-generating assumption ensures that the distance \({\textsf{d}}:M\times M\rightarrow {\mathbb {R}}\) is finite and continuous. Furthermore it induces the same topology as the manifold one. We say that M is complete, if the metric space \((M,{\textsf{d}})\) is.
2.3 Geodesics and Hamiltonian flow
A geodesic is a horizontal curve \(\gamma :[0,T] \rightarrow M\), parameterized with constant speed, such that any sufficiently short segment is length-minimizing. The almost-Riemannian Hamiltonian is the function on the cotagent space \(H\in C^\infty (T^*M)\) defined by
where \(\{X_0,\ldots ,X_n\}\) is a local orthonormal frame for the almost-Riemannian structure, and \(\langle \lambda , \cdot \rangle \) denotes the action of covectors on vectors. The Hamiltonian vector field \(\vec H\) on \(T^*M\) is defined by \(\varsigma (\cdot ,\vec H)=dH\), where \(\varsigma \in \Lambda ^2(T^*M)\) is the canonical symplectic form. Solutions \(\lambda :[0,T] \rightarrow T^*M\) to the Hamilton equations
are called normal extremals. Their projections \(\gamma (t) = \pi (\lambda (t))\) on M, where \(\pi :T^*M\rightarrow M\) is the bundle projection, are locally length-minimizing horizontal curves parameterized with constant speed, and are called normal geodesics. If \(\gamma \) is a normal geodesic with normal extremal \(\lambda \), then its speed is given by \(\Vert \dot{\gamma }\Vert _g = \sqrt{2\,H(\lambda )}\). In particular
There is another class of length-minimizing curves in sub-Riemannian geometry, called abnormal or singular. As for the normal case, to these curves it corresponds an extremal lift \(\lambda (t)\) on \(T^*M\), which however may not follow the Hamiltonian dynamics (6). Here we only observe that an abnormal extremal lift \(\lambda (t)\in T^*M\) satisfies
that is \(H(\lambda (t))\equiv 0\), therefore abnormal geodesics are always contained in the singular region \({\mathcal {Z}}\). A geodesic may be abnormal and normal at the same time.
Definition 2.8
Let M be an almost-Riemannian manifold and let \(p\in M\). Then, the almost-Riemannian exponential map is
where H denotes the almost-Riemannian Hamiltonian (5) and \(e^{\vec H}(\lambda )\) is the solution to (6) at time \(t=1\), with initial datum \(\lambda \in T_p^*M\).
Note that, in general, \(\textrm{exp}_p\) may not be defined on the whole cotangent space, but if M is complete, then \(\vec {H}\) is a complete vector field and (8) is well-posed.
2.4 Length-minimizers to a hypersurface
Let \(\Sigma \subset M\) be a smooth hypersurface and fix \(q_0\in \Sigma \). Moreover, let \(v\in C^\infty (M)\) be a local defining function for \(\Sigma \) around \(q_0\), namely there exists an open neighborhood \(\Sigma _{q_0}\subset \Sigma \) of \(q_0\) such that
We define the local signed distance function from \(\Sigma \) around \(q_0\) as follows:
Let \(\gamma :[0,T]\rightarrow M\) be a horizontal curve, parameterized with constant speed, such that \(\gamma (0)\in \Sigma \), \(\gamma (T) = p \in M\setminus \Sigma \) and assume \(\gamma \) is a minimizer for \({\textsf{d}}(\cdot ,\Sigma )\), that is \(\ell (\gamma )={\textsf{d}}(p,\Sigma )\). In particular, \(\gamma \) is a geodesic and any corresponding normal or abnormal lift, say \(\lambda :[0,T]\rightarrow T^*M\), must satisfy the transversality conditions, cf. [5, Thm 12.13],
Equivalently, the initial covector \(\lambda (0)\) must belong to the annihilator bundle \({\mathcal {A}}\Sigma \) of \(\Sigma \) with fiber \({\mathcal {A}}_q\Sigma = \{\lambda \in T_q^*M \mid \langle \lambda , T_q \Sigma \rangle = 0\}\), for any \(q\in \Sigma \). The restriction of \(\textrm{exp}_q\) to the annihilator bundle of \(\Sigma \) allows to build (locally) a smooth tubular neighborhood around non-characteristic points. Recall that \(q\in \Sigma \) is a characteristic point, and we write \(q\in C(\Sigma )\), if \({\mathcal {D}}_q\subset T_q\Sigma \).
Lemma 2.9
Let \(\Sigma \subset M\) be a smooth hypersurface, let \(q_0\in \Sigma \setminus C(\Sigma )\) be a non-characteristic point and \(v\in C^\infty (M)\) as in (9). Then, there exist \(\varepsilon _{q_0}>0\) and a neighborhood \({\mathcal {O}}_{q_0}\subset \Sigma _{q_0}\) of \(q_0\) such that the map
is a diffeomorphism on its image, where \(\lambda (q)\) is the unique element (up to a sign) of \({\mathcal {A}}_q\Sigma \) such that \(2H(\lambda (q))=1\). Moreover, \(\delta _v\) is smooth in \(G((-\varepsilon _{q_0},\varepsilon _{q_0})\times {\mathcal {O}}_{q_0})\) andFootnote 2
Remark 2.10
It is known that if \(\Sigma \) has no characteristic points, the signed distance is smooth in a tubular neighborhood of \(\Sigma \), cf. [17, Proposition 3.1]. This lemma can be regarded as its local version and its proof is a straightforward adaptation of the aforementioned result. Moreover, note that \(C(\Sigma )\subset {\mathcal {Z}}\) and so the Riemannian points of \(\Sigma \) are non-characteristic. Finally, if \(\Sigma \) contains characteristic points, the parameter \(\varepsilon _{q_0}\), as well as \({\mathcal {O}}_{q_0}\), can not be chosen uniformly.
Remark 2.11
By condition (13), for any \(q\in {\mathcal {O}}_{q_0}\), we have
is the unique minimizing geodesic (parameterized by unit-speed) from \(\Sigma \) passing through q. Moreover, notice that the initial covector \(\lambda (q)\) in (12) is unique up to a sign: the only requirement is to choose this covector in such a way it defines a continuous section of the annihilator bundle.
3 The curvature-dimension condition
A triple \((X,{\textsf{d}},{\mathfrak {m}})\) is called metric measure space if \((X,{\textsf{d}})\) is a complete and separable metric space and \({\mathfrak {m}}\) is a locally finite Borel measure on it. In the following C([0, 1], X) will stand for the space of continuous curves from [0, 1] to X. A curve \(\gamma \in C([0, 1], X)\) is called minimizing geodesic if
we denote by \({{\,\textrm{Geo}\,}}(X)\) the space of minimizing geodesics on X. The metric space \((X,{\textsf{d}})\) is said to be geodesic if every pair of points \(x,y \in X\) can be connected with a curve \(\gamma \in {{\,\textrm{Geo}\,}}(X)\). For any \(t \in [0, 1]\) we define the evaluation map \(e_t :C([0, 1], X) \rightarrow X\) by setting \(e_t(\gamma ):= \gamma _t\) and the stretching/restriction operator \({\textrm{restr}_{r}^{s}}\) in C([0, 1], X), defined, for all \(0\le r<s\le 1\), by
We denote by \({\mathscr {P}}(X)\) the set of Borel probability measures on X and by \({\mathscr {P}}_2(X) \subset {\mathscr {P}}(X)\) the set of those having finite second moment. We endow the space \({\mathscr {P}}_2(X)\) with the Wasserstein distance \(W_2\), defined by
where \(\textsf{Adm}(\mu _0, \mu _1)\) is the set of all the admissible transport plans between \(\mu _0\) and \(\mu _1\), namely all the measures in \({\mathscr {P}}(X^2)\) such that \((\mathtt p_1)_\sharp \pi = \mu _0\) and \((\mathtt p_2)_\sharp \pi = \mu _1\). The metric space \(({\mathscr {P}}_2(X),W_2)\) is itself complete and separable, moreover, if \((X,{\textsf{d}})\) is geodesic, then \(({\mathscr {P}}_2(X),W_2)\) is geodesic as well. In particular, every geodesic \((\mu _t)_{t\in [0,1]}\) in \(({\mathscr {P}}_2(X),W_2)\) can be represented with a measure \(\eta \in {\mathscr {P}}({{\,\textrm{Geo}\,}}(X))\), meaning that \(\mu _t = (e_t)_\# \eta \). A subset \(G\subset {{\,\textrm{Geo}\,}}(X)\) is called non-branching if for any pair \(\gamma _1,\gamma _2\in G\) such that \(\gamma _1\ne \gamma _2\), it holds that
A metric measure space \((X,\textsf{d},{\mathfrak {m}})\) is said to be essentially non-branching if for every two measures \(\mu _0,\mu _1\in {\mathscr {P}}_2(X)\) which are absolutely continuous with respect to the reference measure \({\mathfrak {m}}\) (\(\mu _0,\mu _1 \ll {\mathfrak {m}}\)), every \(W_2\)-geodesic connecting them is concentrated on a non-branching set of geodesics.
3.1 \(\textsf{CD}\) spaces
In this subsection we introduce the \(\textsf{CD}\) condition, pioneered by Sturm and Lott–Villani [20, 28, 29]. This condition aims to generalize, to the context metric measure spaces, the notion of having Ricci curvature bounded from below by K and dimension less than or equal to N. In particular, in the Riemannian setting it is possible to characterize this two bounds in terms of a property whose definition involves only the distance and the (volume) measure. This property, which is stated in Definition 3.1, is given in terms of the following distortion coefficients: for every \(K \in {\mathbb {R}}\) and \(N\in (1,+\infty )\)
where
Definition 3.1
A metric measure space \((X,{\textsf{d}},{\mathfrak {m}})\) is said to be a \(\textsf{CD}(K,N)\) space (or to satisfy the \(\textsf{CD}(K,N)\) condition) if for every pair of measures \(\mu _0=\rho _0{\mathfrak {m}},\mu _1= \rho _1 {\mathfrak {m}}\in {\mathscr {P}}_2(X)\), absolutely continuous with respect to \({\mathfrak {m}}\), there exists a \(W_2\)-geodesic \((\mu _t)_{t\in [0,1]}\) connecting them and induced by \(\eta \in {\mathscr {P}}({{\,\textrm{Geo}\,}}(X))\), such that for every \(t\in [0,1]\) \(\mu _t =\rho _t {\mathfrak {m}}\ll {\mathfrak {m}}\) and the following inequality holds for every \(N'\ge N\) and every \(t \in [0,1]\)
where \(\pi = (e_0,e_1)_\# \eta \).
In general, the \(\textsf{CD}\) condition is not very easy to disprove, however when the reference space is an interval \(I \subseteq {\mathbb {R}}\) the following lemma, whose proof can be find in [14, Lemma A.5], provides a nice strategy.
Lemma 3.2
Let \(I\subset {\mathbb {R}}\) be an interval and let \(h:I \rightarrow {\mathbb {R}}\) be a measurable function such that \((I,|\cdot |, h {\mathscr {L}}^1)\) is a \(\textsf{CD}(K,N)\) space. Then at any point x in the interior of I where h is twice differentiable it holds that
Remark 3.3
This lemma holds also for \(N=+\infty \), where now the left-hand side of (15) has to be intended as \((\log h)^{\prime \prime }(x)\) (for the definition of \(\textsf{CD}(K,\infty )\) space, see [28]).
In fact, in order to disprove that the space \((I,|\cdot |, h {\mathscr {L}}^1)\) satisfies \(\textsf{CD}(K,N)\) is sufficient to find a point x in the interior of I such that h is twice differentiable in x and
Notice also that, if we manage to prove that
we automatically show that \((I,|\cdot |, h {\mathscr {L}}^1)\) does not satisfy \(\textsf{CD}(K,N)\) for every \(N \in (1,+\infty ]\). This observation will be fundamental in the following, especially in combination with the one-dimensional localization results we are now going to present.
3.2 One-dimensional localization
In this subsection we present a suitable adaptation of the one-dimensional characterization of the \(\textsf{CD}\) condition. This property, called \(\textsf{CD}^1(K,N)\) condition, has been studied in the general framework of essentially non-branching metric measure spaces with a curvature-dimension bound in [11,12,13,14]. We provide a local version of such characterization, that allows us to take advantage of the local structure of almost-Riemannian manifolds.
We recall a general result regarding disintegration of measures. Given a measurable space \((R,{\mathscr {R}})\), and a function \({\mathfrak {Q}}: R \rightarrow Q\) to a general set Q, we endow Q with the push forward \(\sigma \)-algebra \({\mathscr {Q}}\) of \({\mathscr {R}}\), i.e. the biggest \(\sigma \)-algebra on Q such that \({\mathfrak {Q}}\) is measurable. Moreover, given a finite (non-null) measure \(\rho \) on \((R,{\mathscr {R}})\), consider the measure \({\mathfrak {q}}:= {\mathfrak {Q}}_\# \rho \) on \((Q,{\mathscr {Q}})\).
Definition 3.4
A disintegration of \(\rho \) consistent with \({\mathfrak {Q}}\) is a map \(Q\ni q\mapsto \rho _q \in {\mathscr {P}}(R)\) such that the following hold:
-
(1)
for all \(B \in {\mathscr {R}}\), \(\rho _\cdot (B)\) is \({\mathfrak {q}}\)-measurable,
-
(2)
for all \(B \in {\mathscr {R}}\), \(C \in {\mathscr {Q}}\), we have
$$\begin{aligned} \rho \left( B \cap {\mathfrak {Q}}^{-1}(C)\right) =\int _{C} \rho _{q}(B) \, {\mathrm d}{\mathfrak {q}}( q). \end{aligned}$$
A disintegration is called strongly consistent with respect to \({\mathfrak {Q}}\) if, in addition, for all \(q \in Q\) it holds that \(\rho _q({{\mathfrak {Q}}}^{-1}(q)) =1\).
Theorem 3.5
[12, Theorem 2.8] Let \((R,{\mathscr {R}})\) be a countably generated measurable space and \(\rho \) be a finite measure on it. Assume there exists a partition of R as
denote by \({\mathfrak {Q}}: R \rightarrow Q\) the quotient map and by \((Q, {\mathscr {Q}}, {\mathfrak {q}})\) the quotient measure space. If \((Q, {\mathscr {Q}}) = (X, {\mathscr {B}}(X))\) where X is a Polish space and \({\mathscr {B}}(X)\) denotes its Borel \(\sigma \)-algebra, then there exists a unique strongly consistent disintegration \(q \mapsto \rho _q\) with respect to \({\mathfrak {Q}}\).
Let \((X,{\textsf{d}},{\mathfrak {m}})\) be a metric measure space and fix an open subset \(\Omega \subset X\) with \(0< {\mathfrak {m}}(\Omega ) = {\mathfrak {m}}(\bar{\Omega })<\infty \). Let \(u:\bar{\Omega } \rightarrow {\mathbb {R}}\) be a 1-Lipschitz function, define
and its transpose \(\Gamma _u^{-1}:=\{(x,y)\in \bar{\Omega }\times \bar{\Omega }\mid (y,x)\in \Gamma _u\}\). Consequently, we introduce the transport relation \(R_u\) and the transport set \(T_u\) as
where \(\mathtt p_1\) denotes the projection on the first factor. Although this is not always the case, if we assume that \(R_u\) is an equivalence relation, we may partition the set \(\bar{\Omega }\). Letting Q be the set of equivalence classes and \({\mathfrak {Q}}:\bar{\Omega }\rightarrow Q\) the quotient map, we can write
where \(\gamma _q:=\{x\in \bar{\Omega } \mid {\mathfrak {Q}}(x) = q\}\) for every \(q \in Q\). With the quotient map we can endow Q with the quotient \(\sigma \)-algebra \({\mathscr {Q}}\), that is the finest \(\sigma \)-algebra on Q for which \({\mathfrak {Q}}\) is measurable. We introduce the following definition to obtain a local version of the one-dimensional localization of Cavalletti and Mondino [12], which better fits the setting of almost-Riemannian geometry, where we have a good local description of geodesics. In [12], the authors define a global partition starting from a globally defined 1-Lipschitz function, see Remark 3.8.
Definition 3.6
We say that a 1-Lipschitz function \(u:\bar{\Omega } \rightarrow {\mathbb {R}}\) induces a one-dimensional partition of \(\bar{\Omega }\) if
-
(1)
\(R_u\) is an equivalence relation and \({\mathfrak {m}}(\bar{\Omega } {\setminus } T_u)=0\),
-
(2)
for every \(q\in Q\), the set \(\gamma _q \subset \bar{\Omega }\) is the image of a geodesic of \((X,{\textsf{d}})\),
-
(3)
for every \(q\in Q\) there exists \(x\in \bar{\Omega }\) such that \({\mathfrak {Q}}(x)=q\) and \(u(x)=0\).
If u induces a one-dimensional partition, then, in particular, we can choose \(Q=\{ u=0\}\). Indeed, the point \(x\in \bar{\Omega }\) satisfying (3) of Definition 3.6 is unique. Define the ray map
by imposing that
The ray map g is Borel and bijective, its inverse is
Moreover, for every \(q\in Q\) the map \(t \mapsto g(q,\cdot )\) is an isometry, and consequently  , where \(I_q:={\text {Dom}}(g(q, \cdot ))\). Theorem 3.5 ensures that there exists a unique strongly consistent disintegration of
, where \(I_q:={\text {Dom}}(g(q, \cdot ))\). Theorem 3.5 ensures that there exists a unique strongly consistent disintegration of  :
:

where \({\mathfrak {m}}_q\) is a measure concentrated on \(\gamma _q\) and we recall that  .
.
Proposition 3.7
Let \((X, {\textsf{d}},{\mathfrak {m}})\) be a essentially non-branching metric measure space satisfying the \(\textsf{CD}(K,N)\) condition, for some \(K\in {\mathbb {R}}\) and \(N \in (1,\infty )\). Let \(\Omega \subset X\) be open and such that \(0< {\mathfrak {m}}(\Omega ) = {\mathfrak {m}}(\bar{\Omega })<\infty \) and let \(u:\bar{\Omega } \rightarrow {\mathbb {R}}\) be a 1-Lipschitz function providing a one-dimensional partition. Then:
-
(1)
for \({\mathfrak {q}}\)-a.e. \(q \in Q\), the measure \({\mathfrak {m}}_q\) is absolutely continuous with respect to
 , namely there exists \(h_q: I_q\rightarrow [0,\infty ]\) such that \({\mathfrak {m}}_{q}=g(q, \cdot )_{\#}\left( h_{q} \cdot {\mathscr {L}}^{1}\right) \),
, namely there exists \(h_q: I_q\rightarrow [0,\infty ]\) such that \({\mathfrak {m}}_{q}=g(q, \cdot )_{\#}\left( h_{q} \cdot {\mathscr {L}}^{1}\right) \), -
(2)
for \({\mathfrak {q}}\)-a.e. \(q\in Q\), \((I_q,|\cdot |,h_q{\mathscr {L}}^1)\) is a \(\textsf{CD}(K,N)\) space.
 , namely there exists
, namely there exists Proof
The proof of this proposition can be done by adapting the classical global approach to the space  , see in particular [11, Sect. 6] for point (1) and [12, Theorem 4.2] for point (2). We point out that this space is not necessarily geodesic, hence we can not conclude that it satisfies the \(\textsf{CD}(K,N)\) condition and simply apply the known results. However, observe that, in order to deduce properties of the disintegration induced by u, it is enough to study Wasserstein geodesics that follow its transport rays. Since u induces a one-dimensional partition in \(\bar{\Omega }\) in the sense of Definition 3.6, all the transport rays are contained in \(\bar{\Omega }\) and the \(\textsf{CD}\) condition (14) holds along such Wasserstein geodesics. For this reason, we can repeat the standard arguments verbatim, obtaining the result. \(\square \)
, see in particular [11, Sect. 6] for point (1) and [12, Theorem 4.2] for point (2). We point out that this space is not necessarily geodesic, hence we can not conclude that it satisfies the \(\textsf{CD}(K,N)\) condition and simply apply the known results. However, observe that, in order to deduce properties of the disintegration induced by u, it is enough to study Wasserstein geodesics that follow its transport rays. Since u induces a one-dimensional partition in \(\bar{\Omega }\) in the sense of Definition 3.6, all the transport rays are contained in \(\bar{\Omega }\) and the \(\textsf{CD}\) condition (14) holds along such Wasserstein geodesics. For this reason, we can repeat the standard arguments verbatim, obtaining the result. \(\square \)
Remark 3.8
In the classical theory of [12], starting from a globally defined 1-Lipschitz function on a \(\textsf{CD}(K,N)\) essentially non-branching metric measure space, the authors build a one-dimensional partition of the whole space, up to a negligible set, and disintegrate the measure accordingly. Then, the densities in the disintegration satisfy the \(\textsf{CD}(K,N)\) condition, providing the one-dimensional characterization \(\textsf{CD}^1(K,N)\). In this setting, there is no need for the additional properties of Definition 3.6 on the 1-Lipschitz function u.
In particular, given a 1-Lipschitz function \(u:X \rightarrow {\mathbb {R}}\), we can introduce the transport relation \(R_u\) and the transport set \(T_u\) as before (with X in place of \(\bar{\Omega }\)) and denote by \(\Gamma _u(x)\) the section of \(\Gamma _u\) through x in the first coordinate. Then, we define the set of forward and backward branching points as
Finally, we define the non-branched transport set and the non-branched transport relation as
On the one hand, as shown in [11], the essentially non-branching assumption ensures that \(R_u^{nb}\) is an equivalence relation on \(T_u^{nb}\) and for \({\mathfrak {q}}\)-a.e. \(q \in Q\), \(\gamma _q\) is isometric to a closed interval of \({\mathbb {R}}\). On the other hand, if \((X,{\textsf{d}},{\mathfrak {m}})\) also satisfies the \(\textsf{CD}(K,N)\) condition, the set \(T_u {\setminus } T_u^{nb}\) is \({\mathfrak {m}}\)-negligible, cf. [12, Theorem 3.4]. It is then possible to obtain a global result, analogous to Proposition 3.7.
Remark 3.9
Note that showing (16) for \(K\in {\mathbb {R}}\) actually implies that \(h_q\) can not be a \(\textsf{CD}(K,\infty )\) density. However, for a metric measure space \((X,{\textsf{d}},{\mathfrak {m}})\), it is not known whether the \(\textsf{CD}(K,\infty )\) condition can be characterized with one-dimensional disintegrations.
4 A general strategy for disproving the \(\textsf{CD}\) condition
The 1-Lipschitz function whose disintegration allows us to disprove the \(\textsf{CD}\) condition will be a localized version of the (signed) distance function from a hypersurface \(\Sigma \). Indeed with this choice we are able to compute explicitly the one-dimensional marginals and to exploit the existence of characteristic points.
4.1 Existence of normal coordinates
Let M be an almost-Riemannian manifold of dimension \(n+1\). We build a convenient set of coordinates around a point in the singular region. This result can be regarded as a generalization of Agrachev et al. [1, Proposition 9.8].
Lemma 4.1
(Normal coordinates) Let M be an almost-Riemannian manifold of dimension \(n+1\), let \({\mathcal {Z}}\subset M\) the set of singular points and let \(p_0\in {\mathcal {Z}}\). Then, there exists a set of coordinates \(\varphi =(x,z):{\mathcal {U}}\rightarrow M\) centered at \(p_0\) and a local orthonormal frame \(X_0, \dots , X_n\) for the almost-Riemannian structure on \({\mathcal {U}}\) such that:
where \(a_{ij}\) are smooth functions in \({\mathcal {U}}\). Moreover, denoting by \(A(x,z)=(a_{ij}(x,z))_{i.j}\), we have \(\det A(0,\textbf{0})=0\).
The proof of Lemma 4.1 follows from the existence of a tubular neighborhood around non-characteristic points. We require a preliminary result.
Lemma 4.2
Let M be an almost-Riemannian manifold and let \(p_0\in M\). Then, there exists a hypersurface \(W\subset M\) such that \(p_0\in W\setminus C(W)\).
Proof
We assume by contradiction that \(p_0\in M\) is a characteristic point for any hypersurface \(W\subset M\) passing through \(p_0\). By definition of characteristic point, this means that \({\mathcal {D}}_{p_0}\subset T_{p_0}W\) for any such W. In turn, this implies that \({\mathcal {D}}_{p_0}=\{0\}\), contradicting the bracket-generating assumption. \(\square \)
Proof of Lemma 4.1
Using Lemma 4.2, we find an embedded hypersurface \(W\subset M\) such that \(p_0\in W\setminus C(W)\). We use the almost-Riemannian normal exponential map to define the desired coordinates. Indeed, let \(v\in C^\infty (M)\) be a local defining function as in (9). Then, by Lemma 2.9, there exist \(\varepsilon _{p_0}>0\) and a neighborhood \({\mathcal {O}}_{p_0}\subset W\) of \(p_0\) such that
is a diffeomorphism on its image, where \(\lambda (p)\) satisfies (11) with \(2H(\lambda (p))=1\). Moreover, the local signed distance function \(\delta _v\) is smooth in \(G((-\varepsilon _{p_0},\varepsilon _{p_0})\times {\mathcal {O}}_{p_0})\) and
Thus, fixing any set of coordinates \((z_1,\ldots ,z_n)\) for \({\mathcal {O}}_{p_0}\), and relabelling \(s=x\), the coordinates (x, z) satisfies (17). Finally, since \(p_0\in {\mathcal {Z}}\), the vector fields \(\{X_0,\ldots ,X_n\}\) are linearly dependent at \(p_0\), meaning that the matrix A(x, z) has zero determinant at \((0,\textbf{0})\). \(\square \)
Remark 4.3
From now on, without loss of generality, whenever we fix a set of coordinates, we will assume that the domain of the chart is the whole \({\mathbb {R}}\times {\mathbb {R}}^n\).
4.2 Assumptions on the almost-Riemannian structure
Let M be an almost-Riemannian manifold of dimension \(n+1\), and let \({\mathcal {Z}}\subset M\) be the set of singular points. Let \(p_0\in {\mathcal {Z}}\) and let \(\Sigma \subset M\) be a hypersurface. To proceed with our general construction, we need two assumptions on the almost-Riemannian structure: in coordinates \((x,z)\in {\mathbb {R}}\times {\mathbb {R}}^n\) centered at \(p_0\) given by Lemma 4.1, we require that
-
(i)
the hypersurface \(\Sigma \) consists of Riemannian points except when \(x=0\) and has a characteristic point at the origin, i.e.

-
(ii)
let \({\mathfrak {m}}\) be any smooth positive measure on M, then



Here by smooth positive measure, we mean a measure with strictly positive and smooth density with respect to the Lebesgue measure in coordinates.
Remark 4.4
Let us comment on why we need these assumptions. The first one is necessary to have a good local description of the marginals outside the set \(\{x=0\}\), in order to exploit the presence of a characteristic point only at the origin, cf. Lemma 2.9. The second one is necessary in order to ensure the essentially non-branching property, cf. Lemma 4.7, and to characterize the marginals in the disintegration, cf. (21).
Remark 4.5
We remark that assumption (H2) is not always guaranteed as the next example shows. Consider \(C\subset [0,1]\) a closed subset with positive Lebesgue measure and empty interior and let \(f\in C^\infty ({\mathbb {R}})\) such that \(f_{|C}\equiv 0\). Then, define the structure on \({\mathbb {R}}^4\) with global orthonormal frame:
As one can check, the Hörmander condition is verified and the local minimal bundle rank is always 4, since C has empty interior. Thus, the structure is almost-Riemannian. Now fix \({\mathfrak {m}}={\mathscr {L}}^4\), then the singular set has infinite measure indeed, by (18)
Here, the matrix A is given by
In an analogue way, one can build an example where (H1) is not verified. Indeed, in the construction above, it is enough to consider a closed set C with empty interior and with an accumulation point at the origin. Then, the hypersurface \(\Sigma =\{z_3=0\}\) has a characteristic point at the origin, however it intersects the singular region in \(C\times {\mathbb {R}}^2\).
Notice that, in coordinates (17), the singular set can be described by the matrix \(A=(a_{ij})_{i,j}\), indeed
In particular, along the hypersurface \(\Sigma \), by (H1), we have
since the set \(\Sigma \cap \{x\ne 0\}\) consists of Riemannian points. As a consequence, since a Riemannian point is never a characteristic one, \(C(\Sigma )\subset \{x=0\}\). Actually, it is always possible to ensure that \(\Sigma =\{z_n=0\}\) satisfies \( (0,\textbf{0})\in C(\Sigma )\), so the only condition one should check is (19).
Lemma 4.6
Let M be an almost-Riemannian manifold and let \(p_0\in {\mathcal {Z}}\). Then, there exists an hypersurface \(\Sigma \subset M\) such that \(p_0\in C(\Sigma )\). Moreover, in coordinates (x, z) as in (17), up to a rotation, we can choose \(\Sigma =\{z_n=0\}\).
Proof
Assume by contradiction that \(p_0\in M\) is not a characteristic point for every hypersurface \(W\subset M\) passing through \(p_0\). Then, by definition of characteristic point, we deduce that \({\mathcal {D}}_{p_0}\) must be transversal to \(T_{p_0}W\), for every such W, or equivalently
for every \(W\subset M\) passing trough \(p_0\). As a consequence, \({\mathcal {D}}_{p_0}=T_{p_0}M\) and thus \(r(p_0)=n+1\). This gives a contradiction, since \(r(p_0)<n+1\), being \(p_0\in {\mathcal {Z}}\). Let us show that in coordinates \(\Sigma \) can be chosen as \(\{z_n=0\}\): since \(\det A(p_0)=0\), there exists an invertible matrix \(M\in \textrm{GL}(n+1,{\mathbb {R}})\) such that the last column of the matrix \(A(p_0)M\) consists of zeroes. Then, we introduce the following change of coordinates
In the new coordinates, the generating family for the distribution has the following expression:
having denoted by \(M=(m_{ij})_{i,j}\). Thus, (17) is still valid and, when evaluated at \(p_0\), the matrix describing the generating family has the last column consisting of zeroes. Finally, this implies that the hypersurface \(\Sigma =\{{\tilde{z}}_n=0\}\) has a characteristic point at \(p_0\). Indeed,
since the last column of the matrix \(A(p_0)M\) is zero, implying that \({\mathcal {D}}_{p_0}\subset T_{p_0}\Sigma \). \(\square \)
Lemma 4.7
Let M be an almost-Riemannian manifold, equipped with a smooth positive measure \({\mathfrak {m}}\) and satisfying assumptions (H2). Then \((M,{\textsf{d}},{\mathfrak {m}})\) is essentially non-branching.
Proof
Let \(\gamma :[0,1]\rightarrow M\) be a minimizing geodesic. Then \(\gamma \) is abnormal if there exists an abnormal extremal lift \(\lambda (t)\ne 0\), satisfying (7). But this implies that
Hence, if \(\gamma \) is a minimizing geodesic with endpoints in the Riemannian region, i.e.
then \(\gamma \) must be strictly normal. As showed in [22, Corollary 6], a strictly normal geodesic \(\gamma :[0,1]\rightarrow M\) is branching for some positive time \(t\in (0,1)\) if and only if it contains a non-trivial abnormal subsegment that starts at time 0. Thus, a minimizing geodesic satisfying (20) can not branch for positive times since \({\mathcal {Z}}\) is closed. Now, let \(\eta \in {\mathscr {P}}({{\,\textrm{Geo}\,}}(X))\) be a \(W_2\)-geodesic joining the measures \(\mu _0,\mu _1\in {\mathscr {P}}_2(X)\), which are absolutely continuous with respect to the reference measure \({\mathfrak {m}}\) (\(\mu _0,\mu _1 \ll {\mathfrak {m}}\)). In particular, notice that \((e_0)_\# \eta = \mu _0\) and \((e_1)_\# \eta = \mu _1\) and therefore, by (H2),
Consequently, the measure \(\eta \) is concentrated on \({{\,\textrm{Geo}\,}}(X) {\setminus } \big (e_0^{-1}({\mathcal {Z}}) \cup e_1^{-1}({\mathcal {Z}})\big )\), which is a non-branching set of geodesics, according to the first part of the proof. \(\square \)
Remark 4.8
Notice that it is possible to build examples of almost-Riemannian manifolds where (H2) is verified but there exist branching geodesics. Indeed, consider \({\mathbb {R}}^4\), with the global orthonormal frame given by
where B is a smooth magnetic potential, defined as in [22], namely
and \(\theta \in C^\infty ({\mathbb {R}})\) such that \(0\le \theta \le 1\), \(\theta (r)=0\) for \(r\le 0\) and \(\theta (r)=1\) for \(r\ge 1\). In this situation, we have strictly normal branching geodesic in the singular region. Nevertheless, thanks to Lemma 4.7, \((M,{\textsf{d}},{\mathfrak {m}})\) is essentially non-branching. On the other hand, if the measure of the singular set is positive, it is unclear whether an almost-Riemannian manifold is essentially non-branching.
4.3 Choice of the local disintegration
Let us fix coordinates \((x,z)\in {\mathbb {R}}\times {\mathbb {R}}^n\) as in (17). Let \({\mathfrak {m}}\) be a smooth positive measure on M and let \(\Sigma =\{z_n=0\}\) be defined as Sect. 4.2. Under the assumptions (H1) and (H2), we consider the signed distance function \(\delta _v\) from \(\Sigma \), as defined in (10), with \(v:=z_n\). For ease of notation, we denote \(\delta _v\) simply by \(\delta \). By triangle inequality, \(\delta \) is always 1-Lipschitz on M with respect to \({\textsf{d}}\). However, \(\delta \) develops singularities at a characteristic point, indeed it is only Hölder (and not Lipschitz) with respect to the Euclidean distance of the chart, see [4, Theorem 4.2]. Roughly speaking, such a singularity is related to the fact that the horizontal gradient of \(\delta \), which exists almost everywhere (see, [16, Theorem 8]), becomes tangent to \(\Sigma \) as the base point approaches a characteristic point. Our idea is to exploit this behavior to prove that the disintegration associated with \(\delta \) does not produce \(\textsf{CD}(K,N)\) densities along the transport rays, for any \(K\in {\mathbb {R}}\), \(N\ge 1\).
Starting from \(\delta \), we build a suitable open and bounded set \(\Omega \) and we consider the local disintegration of  induced by \(\delta \), cf. Section 3.2. Set \(B:=B_r((0,\textbf{0}))\) for some \(r>0\) and define the open and bounded set
induced by \(\delta \), cf. Section 3.2. Set \(B:=B_r((0,\textbf{0}))\) for some \(r>0\) and define the open and bounded set
where G is the map defined in Lemma 2.9 and \(f\in C^\infty (\Sigma )\) such that \(0<f(q_0)<\varepsilon _{q_0}\), for every \(q_0\in \Sigma \setminus C(\Sigma )\). Note that G is a local diffeomorphism on \(\Omega \) and, with this choice of f, \({\mathfrak {m}}(\Omega )={\mathfrak {m}}(\bar{\Omega })\).
Then, \(\delta \) is a 1-Lipschitz function on \(\bar{\Omega }\) inducing a one-dimensional partition in the sense of Definition 3.6. Indeed \(Q=\{\delta =0\}\cap \bar{\Omega }=\Sigma \cap {\bar{B}}\) and, for every \(q\in Q\), the transport ray \(\gamma _q\) of the disintegration coincides with the minimizing geodesics for \(\delta \), which exist by completeness. Moreover, \(T_\delta =\bar{\Omega }\setminus C(\Sigma )\) and therefore, \({\mathfrak {m}}(\bar{\Omega }\setminus T_\delta )=0\). The quotient map \({\mathfrak {Q}}:\bar{\Omega }\rightarrow Q\) can be regarded as a projection on the foot of a geodesic,Footnote 3 thus \({\mathfrak {Q}}\) is the inverse of the exponential map, namely
and G is indeed the ray map associated to the partition. Finally, since \(\Omega \) is defined by the smooth function f, the measure  is smooth on \(\Sigma \).
is smooth on \(\Sigma \).
4.4 Coordinate expression for the marginals in the disintegration
Using Lemma 2.9 and, in particular, the diffeomorphism (12), we can conveniently represent the one-dimensional densities in the disintegration. Indeed, consider a Riemannian point \(q_0=({\bar{x}},{\bar{z}})\in \Sigma \), with \({\bar{z}}_n=0\). In particular, thanks to (19), it is enough to assume \({\bar{x}}\ne 0\). Then, for every Borel set \(C\subset \Omega \), on the one hand we have that

while, on the other hand, making the disintegration explicit and recalling that G is the ray map, we conclude that
Thus, having fixed a frame for \(T\Sigma \), say \(\{v_1,\ldots ,v_n\}\), the density \(h_q(s)\) is given by:
for any \((s,q)\in G^{-1}(\Omega )\), and having used (13) in the last equality.
Remark 4.9
Notice that, from (21), the one-dimensional densities \(h_q(s)\) are smooth functions of \((s,q)\in G^{-1}(\Omega )\). Moreover, they do not depend on the choice of coordinates.
We are going to study the second logarithmic derivative of \(h_q(s)\), at \(s=0\) and as \(q\rightarrow 0\), in order to obtain a contradiction with the differential characterization of Lemma 3.2. Firstly, notice that since we are performing derivatives in s, we can disregard constant functions in s. Secondly, by definition \({\mathfrak {m}}\) is a smooth positive measure, i.e.
for some \(C,c>0\). Moreover, in (21), as a frame for \(T\Sigma \), we can choose the vector fields \(\{\partial _x,\partial _{z_1},\ldots ,\partial _{z_{n-1}}\}\). In conclusion, we obtain the following expression for the one-dimensional density associated with the disintegration:
Then, defining the matrix
where the columns are expressed in coordinates \(\{\partial _x,\ldots ,\partial _{z_n}\}\), the second logarithm derivative at \(s=0\) is given by:
having used Jacobi formula for the determinant of a smooth curve of invertible matrices:
Remark 4.10
We stress that, for any \(q\in Q\setminus C(\Sigma )\), \(h_q(\cdot )\) is defined on an open interval \(I_q\) containing 0. Thus, the derivative in (24) makes sense.
4.5 Computations for the matrix \(B_q(s)\)
Proceeding with hindsight, we analyze the term of (24) involving \(B_q(s)\), as in general it will be more singular than the other one. We expand in s its columns and we deduce an expression for the coefficients of the expansion, using the almost-Riemannian Hamiltonian system.
4.5.1 An expression for the trace term in (24)
We look for an explicit expression for the matrix \(B_q(s)\). We may regard \(\nabla \delta \in {\mathbb {R}}^{n+1}\) and \(G:{\mathbb {R}}\times {\mathbb {R}}^n\rightarrow {\mathbb {R}}^{n+1}\), therefore expanding in s, there exists smooth functions \({\mathfrak {f}},{\mathfrak {h}}\in C^\infty (\Sigma \cap \Omega )\) such that,
as \(s\rightarrow 0\). The relation between the two expansions comes from (13). Therefore, we obtain the following formulas for \(B_q(s)\) and its derivatives at \(s=0\): for the zero order term, we have

For the first derivative of \(B_q(s)\), we differentiate component by component. Notice that we have to take into account the quantities \(\partial _{z_i}G(0,q)\), with \(i=0,\ldots ,n-1\),Footnote 4 therefore we have to differentiate the expansion (25), namely:
as \(s\rightarrow 0\), for any \(i=0,\ldots ,n-1\), where the derivatives have to be interpreted component by component. Therefore, we obtain:
Analogously, we can deduce the expression for the second-order derivative of \(B_q(s)\) at \(s=0\):
Inserting the above formulas in the trace term in (24), we obtain the desired expression, in terms of the quantities \(\nabla \delta \), \({\mathfrak {f}}\) and \({\mathfrak {h}}\).
4.5.2 Explicit expression for \(\nabla \delta \), \({\mathfrak {f}}\) and \({\mathfrak {h}}\)
In order to obtain an explicit expression for \(\nabla \delta \), \({\mathfrak {f}}\) and \({\mathfrak {h}}\), we study the Hamiltonian system associated with the almost-Riemannian Hamiltonian
where \(\{X_0,\ldots ,X_n\}\) is the local orthonormal frame for the distribution defined in (17). In coordinates (x, z), the almost-Riemannian metric g on the Riemannian region is represented by the matrix
Therefore the Hamiltonian in canonical coordinates induced by (x, z) is
where \(p_z\) is a shorthand for \((p_{z_1},\ldots ,p_{z_n})\). The Hamiltonian system then becomes
From Lemma 2.9 (cf. also Remark 2.11) we know that the unique minimizing geodesic for \(\delta \) with initial point \(q\in \Sigma \cap \Omega \) has unique (up to a sign) initial covector such that:
Since \(T_q\Sigma ={{\,\textrm{span}\,}}\{\partial _x,\partial _{z_1},\ldots ,\partial _{z_{n-1}}\}\), the first condition in (27) implies that \(\lambda (q)=p_{z_n}dz_n\). In addition, the second condition in (27) forces \(\lambda (q)\) to be of the form:
where we choose \(\beta \) to be positive. Thus, denoting by \((x^q(s),z^q(s);p_x^q(s),p_z^q(s))\) the solution to (26) with initial datum \((\lambda (q);q)\), the minimizing geodesic for \(\delta \) starting at q is given by:
where \(I_q\) is an open interval containing the origin. By (13) and (29), we deduce that
Computing derivatives along s of the equality (13) and recalling the definition of \({\mathfrak {f}},{\mathfrak {h}}\) in (25), we analogously obtain higher-order expression in terms of the solution to (26), precisely:
We refer to Appendix 1 for the explicit expression of \({\mathfrak {f}}\) and \({\mathfrak {h}}\).
4.6 Contradicting the \(\textsf{CD}\) condition
The idea is to exploit the presence of a characteristic point for \(\Sigma \) at the origin to conclude that
proving (16) for every \(K\in {\mathbb {R}}\), up to taking x sufficiently small. Keeping in mind (24), we anticipate that the term providing the desired pathology will be
Observe that, according to Sect. 3, in order to disprove the \(\textsf{CD}(K,N)\) condition for every \(K\in {\mathbb {R}}\) and \(N\in (1,+\infty )\) we need to show that, given any \(K\in {\mathbb {R}}\), it holds
for every q in a \({\mathfrak {q}}\)-positive set. However, since the function \((s,q)\rightarrow h_q(s)\) is smooth (see Remark 4.9) it is sufficient to prove (31).
Notice that the initial covector for the minimizing geodesic from \(\Sigma \) in (28) is singular at \(q= (0,\textbf{0})\). More precisely, since \((0,\textbf{0})\in C(\Sigma )\) and \(\Sigma \) is the level set of \(v(x,z)=z_n\), we have that
meaning that the function \(\beta (q)\) defined in (28) vanishes at q if and only if \(q\in C(\Sigma )\). In particular, it vanishes at the origin, making the initial covector singular at \(q= (0,\textbf{0})\). Moreover, solving the Hamiltonian system, we deduce that
Remark 4.11
On the one hand, all the components of \(\nabla \delta (q)\), but the first and last, are singular at \(q= (0,\textbf{0})\), as fast as the initial covector (28). On the other hand, since the last component of \(\nabla \delta (q)\) is exactly \(\beta (q)\) which tends to 0 as \(q\rightarrow (0,\textbf{0})\), formally \(\nabla \delta (q)\) becomes tangent to \(\Sigma \) at the characteristic point.
In particular, we see that \(\nabla \delta (q)\) is singular at the origin and the same goes for the functions \({\mathfrak {f}}(q)\), \({\mathfrak {h}}(q)\). Replacing their explicit expressions in (24), we will be able to prove (31).
Remark 4.12
The procedure described in this section for disproving the \(\textsf{CD}\) condition is constructive and the algorithm has been implemented in the software Mathematica. The code is available online, see [23].
5 2-Dimensional almost-Riemannian manifolds do not satisfy \(\textsf{CD}\)
In this section, we apply our general strategy to show that 2-dimensional almost-Riemannian manifolds do not satisfy any curvature-dimension condition. The reason why we are able to perform explicit computations is related to the better regularity properties of \(\delta \), when \(\dim M=2\), cf. Remark 4.11.
Let M be an almost-Riemannian manifold of dimension 2, with non-empty singular region \({\mathcal {Z}}\subset M\). We recall the following local description of a general 2-dimensional almost-Riemannian manifold which holds without any assumption on the structure of the singular set, see [3, Lemma 17].
Lemma 5.1
Let M be an almost-Riemannian manifold. Then, for every point \(q_0\in M\), there exists a set of coordinates \(\varphi =(x,z):{\mathcal {U}}\rightarrow M\), centered at \(q_0\), such that a local orthonormal frame for the distribution is given by
where \(f:{\mathcal {U}}\rightarrow {\mathbb {R}}\) is a smooth function. Moreover,
-
(i)
the integral curves of X are normal extremals, as in (6);
-
(ii)
let s be the step of the structure at \(q_0\). If \(s = 1\) then \(f(0,0) \ne 0\). If \(s\ge 2\), we have
$$\begin{aligned} f(0,0)=0,\ \ldots ,\quad \frac{\partial ^{s-2}f}{\partial x^{s-2}}(0,0)=0,\quad \frac{\partial ^{s-1}f}{\partial x^{s-1}}(0,0)\ne 0. \end{aligned}$$(33)
Remark 5.2
This Lemma improves Lemma 4.1 since we can give additional condition on the function \(f(x,z)=\det A(x,z)\), using the Hörmander condition.
In the 2-dimensional case, assumption (H2) is always verified, see [1, Theorem 9.14]. For what concerns assumption (H1), we have the following lemma.
Lemma 5.3
Let M be a 2-dimensional almost-Riemannian manifold and let \(q_0\in {\mathcal {Z}}\). Consider the curve in normal coordinates \(\Sigma =\{z=0\}\). Then, up to restricting the chart, \(\Sigma \cap {\mathcal {Z}}=C(\Sigma )=\{(0,0)\}\).
Proof
Recall that if \(\Sigma =\{v=0\}\), for \(v\in C^\infty \) with never-vanishing differential, then
where \(\nabla u\) denotes the horizontal gradient of v. In particular, in the normal coordinates given by Lemma 5.1, the singular region is \({\mathcal {Z}}\cap {\mathcal {U}}=\{(x,z)\mid f(x,z)=0\}\), thus setting \(v(x,z)=z\),
Since \(q_0\in {\mathcal {Z}}\), then \(\dim ({\mathcal {D}}_{q_0})<2\) and the almost-Riemannian structure has step \(s\ge 2\) at \(q_0\). Thus \(f(0,0)=0\) and consequently \(p=q_0\in C(\Sigma )\). On the other hand, if \(0<|x|<\varepsilon \), \(f(x,0)\ne 0\). Indeed, by the vanishing condition (33) on f, we can expand f(x, 0) as a Taylor series at \(x=0\), obtaining
where the leading term is not zero. This implies that there exists a smooth function \(r\in C^\infty (-\varepsilon ,\varepsilon )\), such that \(r(x)\ne 0\), for every \(x\in (-\varepsilon ,\varepsilon )\) and \(f(x,0)=r(x)x^{s-1}\), which never vanishes on \(\Sigma \cap {\mathcal {U}}\setminus \{q_0\}\), up to restricting the domain of the chart \({\mathcal {U}}\). \(\square \)
Now, thanks to Lemmas 5.1 and 5.3, we can follow the general strategy (cf. Sect. 4) to disprove the \(\textsf{CD}\) condition. First of all, notice that the matrix \(A=(f(x,z))\) has only one entry, so the Hamiltonian system is greatly simplified. More precisely, the initial covector (28) becomes:
Thus, as one can check using (26), (30) and (32) we have
Here we have omitted the first component of \({\mathfrak {h}}(x)\), since we will not need it.
Second of all, we can replace the quantities (34) in the matrix \(B_q(s)\), defined in (23). After a long but routine computation, we obtain the following expression for the logarithmic second derivative of \(\det B_q(s)\) at \(s=0\), namely
We are in position to prove the main result of this section.
Theorem 5.4
Let M be a complete 2-dimensional almost-Riemannian manifold and let \({\mathfrak {m}}\) be any smooth positive measure on M. Then, the metric measure space \((M,{\textsf{d}},{\mathfrak {m}})\) does not satisfy the \(\textsf{CD}(K,N)\) condition for any \(K\in {\mathbb {R}}\) and \(N\in (1,+\infty )\).
Proof
As explained in Sect. 4, we have to show that the quantity \(\left( \log h_x(s)\right) ''(0)\) diverges at \(+\infty \) as \(x\rightarrow 0\). Recall that, by the proof of Lemma 5.3, there exists a never-vanishing function \(r\in C^\infty (-\varepsilon ,\varepsilon )\) such that
Therefore, using the smoothness of both f and r, we deduce that
which diverges to \(+\infty \) as \(x\rightarrow 0\), since \((0,0)\in {\mathcal {Z}}\) and therefore \(s>1\). Moreover, let us remark that the singularity is polynomial of order \(-2\). We are left to take care of the first term in (24): by a direct computation and using (22), one can check that
where \(|\cdot |_e\) denotes the Euclidean norm of \({\mathbb {R}}^2\). Since the singularity in (36) is polynomial of order 1, it is negligible compared to the one in (35), and we conclude that:
disproving the \(\textsf{CD}(K,N)\) condition for any \(K\in {\mathbb {R}}\) and \(N\in (0,+\infty )\), as desired. \(\square \)
Remark 5.5
A similar argument can be carried out for generic 3-dimensional almost-Riemannian manifolds, in the sense of Agrachev et al. [3, Definition 2]. Indeed, in this situation we have a convenient description of a local orthonormal frame, and of the matrix A, cf. [6, Theorem 2].
6 Strongly regular almost-Riemannian manifolds do not satisfy \(\textsf{CD}\)
In this section, we prove that strongly regular almost-Riemannian manifolds do not satisfy any curvature-dimension condition. Strongly regular almost-Riemannian manifolds have been studied in [15, 25]. In this setting, we can deal with the complexity of the computations thanks to a nice local description of the singularities of the structure. We recall the following definition.
Definition 6.1
Let M be a n-dimensional almost-Riemannian manifold. Assume that the singular set \({\mathcal {Z}}\subset M\) is an embedded hypersurface without characteristic points. Then, for any \(q_0\in {\mathcal {Z}}\), there exist local coordinates (x, z) centered at \(q_0\) such that \({\mathcal {Z}}=\{x=0\}\) in coordinates, and condition (17) is verified, namely a local orthonormal frame for the distribution is given by
for some smooth functions \(a_{ij}\), so that, denoting by \(A=(a_{ij})_{i,j}\),
We say that M is a strongly regular almost-Riemannian manifold, if there exists \(l\in {\mathbb {N}}\) such that
for all (0, z) in the domain of the chart.
Remark 6.2
Although being formulated in coordinates, the notion of a strongly regular almost-Riemannian structure on M is intrinsic. In particular, condition (37), as well as the order l, do not depend neither on the choice of \(q_0\in {\mathcal {Z}}\) nor on the coordinates (x, z), see [25] for further details.
In order to apply our general strategy, we have to ensure that conditions (H1) and (H2) are verified. The former is a consequence of the very definition of strongly regular almost-Riemannian structure and we pick \(\Sigma \) as in Lemma 4.6 so that also the latter condition is satisfied. We proceed by computing the second logarithmic derivative of the one-dimensional densities,
where \(\beta _i\), \({\mathfrak {f}}_i\), \({\mathfrak {h}}_i\) denote the components of \(\nabla \delta \), \({\mathfrak {f}}\) and \({\mathfrak {h}}\) respectively. This computation follows from the trace term in (24), using the property that the first component of \(\nabla \delta \) is identically zero, cf. (32).
Theorem 6.3
Let M be a complete strongly regular almost-Riemannian manifold and let \({\mathfrak {m}}\) be any smooth positive measure on M. Then, the metric measure space \((M,{\textsf{d}},{\mathfrak {m}})\) does not satisfy the \(\textsf{CD}(K,N)\) condition for any \(K\in {\mathbb {R}}\) and \(N\in (1,+\infty )\).
Proof
As in the proof of Theorem 5.4, we have to show that the quantity \(\left( \log h_q(s)\right) ''(0)\) diverges at \(+\infty \) as \(q\rightarrow 0\) along \(\Sigma \). To do that, the idea is to highlight the most singular terms in x, namely those where a derivative in x appears. Let us discuss the order in x of the quantities in (38), using as well formulas from Appendix 1. Firstly, since M is strongly regular, (37) holds and we have
with \({\hat{\beta }}(0,z)\ne 0\). Thus, \(\beta \) has order l in x. Similarly, the components \(\beta _i\) of \(\nabla \delta \) are given by (42),
Therefore, also \(\beta _i\)’s have order l in x. A crucial remark before moving forward is that, thanks to the strongly regular assumption on M, computing derivatives along z-directions does not change the order in x of the quantities. Thus, for example,
Reasoning in this way, for the functions \({\mathfrak {f}}_i\) defined in (43), we have:
and the same is true for any derivative in z-directions. For what concerns \({\mathfrak {f}}_0\), recall that
From (40), it is clear that derivatives in the x-direction encode all the possible singularities of second logarithmic derivatives of \(h_q(s)\). Finally, using (44), we see that
Finally, we can evaluate the order in x of the functions in (38): the lowest order is \(-2\) coming from the terms \({\mathfrak {h}}_n\beta ^{-1}\), \(\partial _x{\mathfrak {f}}_0\) and \(\beta ^{-1}{\mathfrak {f}}_0\partial _x\beta \). Thus, denoting by \(z'=(z_1,\ldots ,z_{n-1},0)\), we obtain:
Now using (39), we can reason as in the 2-dimensional case, cf. (35), to conclude that
Once again, also in this situation, the singularity in x of the quantity \( \left( \log \det B_q(s)\right) ''(0)\) is polynomial of order \(-2\). Finally, using the same argument used in (36) for the 2-dimensional case, we can show that the density of the measure \({\mathfrak {m}}\) produces a polynomial singularity of order \(-1\), which is negligible as \(q\rightarrow (0,\textbf{0})\). Finally, we obtain
disproving the \(\textsf{CD}(K,N)\) condition for any \(K\in {\mathbb {R}}\) and \(N\in (1,+\infty )\), as desired. \(\square \)
Remark 6.4
We stress once again that, thanks to the strongly regular assumption on M, the order of the structure (and thus the order of \(\beta \)) controls the orders in x, not only of the functions \(\beta _i\), \({\mathfrak {f}}_i\) and \({\mathfrak {h}}_n\), but also of their derivatives in the z-directions. Below, we provide an example of regular (but not strongly regular) structure where the orders of the derivatives are not controlled by the order of \(\beta \). Nevertheless our strategy to disprove the \(\textsf{CD}\) condition works.
In full generality, it is possible to prove that \( \left( \log \det h_x(s)\right) ''(0)\) actually diverges, however there is no criterion of determining the sign of the leading order, without requiring some additional regularity on the structure. On the other hand, as characteristic points encode the truly sub-Riemannian behavior of almost-Riemannian manifolds, we believe that our strategy should always be effective.
Example 6.5
Let \(M={\mathbb {R}}^4\) and in coordinates \((x,z_1,z_2,z_3)\) consider the almost-Riemannian structure defined by the global vector fields
The singular region is given by \({\mathcal {Z}}=\{x=0\}\) and is an embedded hypersurface without characteristic points. Notice that M is regular, see [25, Definition 7.10] for the precise definition, but not strongly regular, thus we can not apply Theorem 6.3. Nevertheless, if we consider \(\Sigma =\{z_3=0\}\), assumptions (H1) and (H2) are verified, therefore, we can apply our general strategy. Setting \({\mathfrak {m}}={\mathscr {L}}^4\), an explicit computation leads to
which diverges at \(+\infty \) along the curve (x, 0, 0, 0) as \(x\rightarrow 0\), disproving the \(\textsf{CD}(K,N)\) condition for any \(K\in {\mathbb {R}}\) and \(N\ge 1\). A few remarks are in order: first of all, the function \(\beta (x,z_1,z_2)=4x^2+z_1^2+z_2^2\) has order 2 in x but this is not true for its derivatives in the z-directions. Second of all, the numerator of (41) does not have a sign, highlighting the difficulties of the general case of determining the behavior of the leading term.
Data Availability
All data generated or analysed during this study are included in this published article.
Notes
But not at every point, otherwise the structure would be Riemannian.
The horizontal gradient of \(f\in C^\infty (M)\) is defined by \(g_p(\nabla f,v)=d_pf(v),\forall \,v\in {\mathcal {D}}_p\) and \(p\in M\).
For any \(p\in \bar{\Omega }\), there exists a unique point \({{\textsf{f}}}(p)\in \Sigma \cap \bar{\Omega }\) for which \(|\delta (p)| = {\textsf{d}}(p, {{\textsf{f}}}(p))\).
Here and below, with a slight abuse of notation, for \(i=0\), we set \(z_0=x\) and \(\partial _{z_0}=\partial _x\).
We drop the superscript q only in this section to ease the notation.
References
Agrachev, A., Barilari, D., Boscain, U.: A comprehensive introduction to sub-Riemannian geometry. In: Volume 181 of Cambridge Studies in Advanced Mathematics. Cambridge University Press, Cambridge (2020). From the Hamiltonian viewpoint, With an appendix by Igor Zelenko
Agrachev, A., Barilari, D., Rizzi, L.: Curvature: a variational approach. Mem. Am. Math. Soc. 256(1225):v+142 (2018)
Agrachev, A., Boscain, U., Sigalotti, M.: A Gauss–Bonnet-like formula on two-dimensional almost-Riemannian manifolds. Discrete Contin. Dyn. Syst. 20(4), 801–822 (2008)
Albano, P., Cannarsa, P., Scarinci, T.: Regularity results for the minimum time function with Hörmander vector fields. J. Differ. Equ. 264(5), 3312–3335 (2018)
Agrachev, A., Sachkov, Y.L.: Control theory from the geometric viewpoint. Volume 87 of Encyclopaedia of Mathematical Sciences, Control Theory and Optimization, II. Springer, Berlin (2004)
Boscain, U., Charlot, G., Gaye, M., Mason, P.: Local properties of almost-Riemannian structures in dimension 3. Discrete Contin. Dyn. Syst. 35(9), 4115–4147 (2015)
Balogh, Z.M., Kristály, A., Sipos, K.: Jacobian determinant inequality on corank 1 Carnot groups with applications. J. Funct. Anal. 277(12), 108293, 36, (2019)
Barilari, D., Rizzi, L.: Sharp measure contraction property for generalized H-type Carnot groups. Commun. Contemp. Math. 20(6), 17500, 24,81 (2018)
Barilari, D., Rizzi, L.: Sub-Riemannian interpolation inequalities. Invent. Math. 215(3), 977–1038 (2019)
Badreddine, Z., Rifford, L.: Measure contraction properties for two-step analytic sub-Riemannian structures and Lipschitz Carnot groups. Ann. Inst. Four. (Grenoble) 70(6), 2303–2330 (2020)
Cavalletti, F.: Monge problem in metric measure spaces with Riemannian curvature-dimension condition. Nonlinear Anal. 99, 136–151 (2014)
Cavalletti, F., Mondino, A.: Sharp and rigid isoperimetric inequalities in metric-measure spaces with lower Ricci curvature bounds. Invent. Math. 208(3), 803–849 (2017)
Cavalletti, F., Mondino, A.: New formulas for the Laplacian of distance functions and applications. Anal. PDE 13(7), 2091–2147 (2020)
Cavalletti, F., Milman, E.: The globalization theorem for the curvature-dimension condition. Invent. Math. 226(1), 1–137 (2021)
Chitour, Y., Prandi, D., Rizzi, L.: Weyl’s law for singular Riemannian manifolds (2019). arXiv prepint arXiv:1903.05639
Franchi, B., Hajłasz, P., Koskela, P.: Definitions of Sobolev classes on metric spaces. Ann. Inst. Four. (Grenoble) 49(6), 1903–1924 (1999)
Franceschi, V., Prandi, D., Rizzi, L.: On the essential self-adjointness of singular sub-Laplacians. Potential Anal. 53(1), 89–112 (2020)
Juillet, N.: On a method to disprove generalized Brunn–Minkowski inequalities. In: Probabilistic Approach to Geometry, Volume 57 of Adv. Stud. Pure Math., pp. 189–198. The Mathematical Society of Japan (2010)
Juillet, N.: Sub-Riemannian structures do not satisfy Riemannian Brunn–Minkowski inequalities. Rev. Mat. Iberoam. 37(1), 177–188 (2021)
Lott, J., Villani, C.: Ricci curvature for metric-measure spaces via optimal transport. Ann. Math. (2) 169(3), 903–991 (2009)
Milman, E.: The quasi curvature-dimension condition with applications to sub-Riemannian manifolds. Commun. Pure Appl. Math. 74(12), 2628–2674 (2021)
Mietton, T., Rizzi, L.: Branching geodesics in sub-Riemannian geometry. Geom. Funct. Anal. 30(4), 1139–1151 (2020)
Magnabosco, M., Rossi, T.: An algorithmic procedure to disprove the CD condition for almost-Riemannian manifolds (2022). https://github.com/TRenghia/CD-on-AR-manifolds
Ohta, S.-I.: On the measure contraction property of metric measure spaces. Comment. Math. Helv. 82(4), 805–828 (2007)
Prandi, D., Rizzi, L., Seri, M.: Quantum confinement on non-complete Riemannian manifolds. J. Spectr. Theory 8(4), 1221–1280 (2018)
Rizzi, L.: Measure contraction properties of Carnot groups. Calc. Var. Part. Differ. Equ. 55(3), 20 (2016)
Rizzi, L., Stefani, G.: Failure of curvature-dimension conditions on sub-Riemannian manifolds via tangent isometries (2023). arXiv prepint arXiv:2301.00735
Sturm, K.-T.: On the geometry of metric measure spaces. I. Acta Math. 196(1), 65–131 (2006)
Sturm, K.-T.: On the geometry of metric measure spaces. II. Acta Math. 196(1), 133–177 (2006)
Acknowledgements
The authors gratefully acknowledge support from the European Research Council (ERC) under the program ERC-AdG RicciBounds, Grant Agreement No. 694405. The authors are thankful to Fabio Cavalletti for stimulating discussion regarding the \(\textsf{CD}^1\) condition. We would like to thank anonymous referee for the careful reading of the manuscript and the valuable comments.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Andrea Mondino.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A. Explicit expression for \(\nabla \delta \), \({\mathfrak {f}}\) and \({\mathfrak {h}}\)
Appendix A. Explicit expression for \(\nabla \delta \), \({\mathfrak {f}}\) and \({\mathfrak {h}}\)
In order to obtain an explicit expression for \(\nabla \delta \), \({\mathfrak {f}}\) and \({\mathfrak {h}}\), we study the Hamiltonian system associated with the sub-Riemannian Hamiltonian. Recall that in canonical coordinates induced by (x, z), given by (17), the Hamiltonian is
where \(p_z\) is a shorthand for \((p_{z_1},\ldots ,p_{z_n})\). For the hypersurface \(\Sigma \subset M\), given by (H1), from Lemma 2.9, we know that the unique minimizing geodesic for \(\delta \) with initial point \(q\in \Sigma {\setminus } C(\Sigma )\) has unique (up to a sign) initial covector:
Thus, if \((x(s),z(s),p_x(s),p_z(s))\)Footnote 5 is the solution to (26) with initial datum \((\lambda (q);q)\), we deduce that
having denoted \(\nabla \delta (q)=\left( \beta _0(q),\ldots ,\beta _n(q)\right) \). Moreover, notice that by definition \(\beta _n(q)=\beta (q)\). In an analogous way, we can compute \({\mathfrak {f}}=\left( {\mathfrak {f}}_0,\ldots ,{\mathfrak {f}}_n\right) \):
Finally, taking the third-order derivatives in s of the solution to (26), we obtain \({\mathfrak {h}}\). Notice, however, that we only need the n-th component of \({\mathfrak {h}}\) in (38), thus:
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Magnabosco, M., Rossi, T. Almost-Riemannian manifolds do not satisfy the curvature-dimension condition. Calc. Var. 62, 123 (2023). https://doi.org/10.1007/s00526-023-02466-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00526-023-02466-x