
Abstract
A model for a MEMS device, consisting of a fixed bottom plate and an elastic plate, is studied. It was derived in a previous work as a reinforced limit when the thickness of the insulating layer covering the bottom plate tends to zero. This asymptotic model inherits the dielectric properties of the insulating layer. It involves the electrostatic potential in the device and the deformation of the elastic plate defining the geometry of the device. The electrostatic potential is given by an elliptic equation with mixed boundary conditions in the possibly non-Lipschitz region between the two plates. The deformation of the elastic plate is supposed to be a critical point of an energy functional which, in turn, depends on the electrostatic potential due to the force exerted by the latter on the elastic plate. The energy functional is shown to have a minimizer giving the geometry of the device. Moreover, the corresponding Euler–Lagrange equation is computed and the maximal regularity of the electrostatic potential is established.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The modeling and analysis of microelectromechanical systems (MEMS) has attracted a lot of interest in recent years, see, e.g., [10, 11, 19, 20, 30, 31, 35] and the references therein. Idealized devices often consist of a rigid dielectric ground plate above which an elastic dielectric plate is suspended. Applying a voltage difference between the two plates induces a competition between attractive electrostatic Coulomb forces and restoring mechanical forces, the latter resulting from the elasticity of the upper plate. When electrostatic forces dominate mechanical forces, the two plates may come into contact, a phenomenon usually referred to as pull-in instability or touchdown. From a mathematical point of view, this phenomenon may be accounted for in different ways. In fact, in most mathematical models considered so far in the MEMS literature, the pull-in instability is revealed as a singularity in the corresponding mathematical equations which coincides with a breakdown of the model, see [10, 19, 31] and the references therein. There is a close connection between the singular character of the touchdown and the fact that the modeling does not account for the thickness of the plates. Indeed, coating the ground plate with a thin insulating layer prevents a direct contact of the plates, so that a touchdown of the elastic plate on the insulating layer does not interrupt the operation of the device [6, 21, 24, 25]. Due to the presence of this layer, the MEMS device features heterogeneous dielectric properties (with a jump of the permittivity at the interface separating the coated ground plate and the free space beneath the elastic plate) and the electrostatic potential solves a free boundary transmission problem in the non-smooth domain enclosed between the two plates [21]. The shape of the domain itself is given by a partial differential equation governing the deflection of the elastic plate from rest, which, in turn, involves the electrostatic force exerted on the latter. The mathematical treatment of such a model is rather complex, see [21, Sect. 5] and [22]. It is thus desirable to derive simpler and more tractable models. As the modeling involves two small spatial scales – the aspect ratio \(\varepsilon \) of the device and the thickness d of the insulating layer – a variety of reduced models may be obtained. For instance, the assumption of a vanishing aspect ratio of the device, when either the ratio \(d/\varepsilon \) has a positive finite limit [2, 6, 18, 24, 25] or converges to zero, see [10, 30, 31] and the references therein, leads to a model which no longer involves a free boundary. Indeed, in that case, the electrostatic potential can be computed explicitly in terms of the deflection of the elastic plate and the model reduces to a single equation for the deflection, with the drawback that some important information on the electrostatic potential may thus be lost.
For this reason an intermediate model is derived in [16] by letting only the thickness of the insulating layer d go to zero (keeping the aspect ratio of the device of order one). Assuming an appropriate scaling of the dielectric permittivity in dependence on the layer’s thickness (in order to keep relevant information of the dielectric heterogeneity of the device) and using a Gamma convergence approach, the resulting energy, which is the building block of the model, is computed. The next step is the mathematical analysis of the thus derived model, in which stationary solutions correspond to critical points of the energy, while the dynamics is described by the gradient flow associated with the energy. The aim of the present work is to show the existence of a particular class of stationary solutions, which are additionally energy minimizers, and to identify the corresponding Euler–Lagrange equations.
Let us provide beforehand a more precise description of the MEMS configuration under study. We consider an idealized MEMS device composed of two rectangular two-dimensional dielectric plates: a fixed ground plate above which an elastic plate, with the same shape at rest, is suspended and clamped in only one direction while free in the other. We assume that the device is homogeneous in the free direction and that it is thus sufficient to consider a cross-section of the device orthogonal to the free direction. The shape of the ground plate and that of the elastic plate at rest are then represented by \(D:=(-L,L)\subset {\mathbb {R}}\), the ground plate being located at \(z=-H\) with \(H>0\) and covered with an infinitesimally thin dielectric layer (in consistency with the aforementioned limit). The vertical deflection of the elastic plate from its rest position at \(z=0\) is described by a function \(u:{\bar{D}}\rightarrow [-H, \infty )\) satisfying the clamped boundary conditions
so that its graph
represents the elastic plate and
is the free space between the elastic plate and the ground plate. Since we do not exclude the possibility of contact between the two plates, we introduce the coincidence set
and let
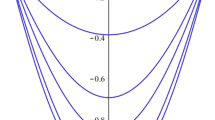
be the part of the ground plate which is not in contact with the elastic plate. A touchdown of the elastic plate on the ground plate corresponds to a non-empty coincidence set, in which case \(\Sigma (u)\) is a strict subset of \(D\times \{-H\}\). Note that the free space \(\Omega (u)\) then has a different geometry with at least two connected components, which may not be Lipschitz domains due to cusps (independent of the smoothness of the function u). In Fig. 1 the different situations with empty and non-empty coincidence sets are depicted.

Geometry of \(\Omega (u)\) for a state \(u=v\) with empty coincidence set (green) and a state \(u=w\) with non-empty coincidence set (blue) (color figure online)
As already mentioned, the building block of the model studied in this paper is the total energy E(u) of the device at a state u given by
and derived in [16] in the limit of an infinitesimally small insulating layer. It consists of the mechanical energy \(E_m(u)\) and the electrostatic energy \(E_e(u)\). The former is given by
with \(\beta >0\) and \(\tau ,\alpha \ge 0\), taking into account bending and external- and self-stretching effects of the elastic plate. The electrostatic energy is
where \(\psi _u\) is the electrostatic potential in the device and solves the elliptic equation with mixed boundary conditions
In (1.3), the function \(\sigma \) represents the properties of the dielectric permittivity inherited from the insulating layer while the functions \(h_u\) and \({\mathfrak {h}}_u\) determining the boundary values of \(\psi _u\) on \(\partial \Omega (u)\) are of the form
for some prescribed functions
The main results of this work are the existence of at least one minimizer of the total energy E and the derivation of the corresponding Euler–Lagrange equation. This requires, of course, first to study the well-posedness of the elliptic problem (1.3) subject to its mixed boundary conditions. A first step in that direction is to guarantee that the electrostatic energy \(E_e\) is well-defined, which turns out to require some care. Indeed, it should be pointed out that \(\Omega (u)\) is a non-smooth domain with corners and possibly features turning points, for instance when \({\mathcal {C}}(u)\) includes an interval, see Fig. 1. Thus, \(\Omega (u)\) might consist of several components no longer having a Lipschitz boundary, so that traces have first to be given a meaning. Once this matter is settled, the existence of a variational solution \(\psi _u\) to (1.3) readily follows from the Lax-Milgram Theorem and the electrostatic energy is then well-defined. This paves the way to the proof of the existence of minimizers of the total energy by the direct method of calculus of variations but does not yet allow us to conclude. Indeed, since E involves two contributions with opposite signs, it might be unbounded from below. We overcome this difficulty by adding a penalization term to the total energy. This additional term can be removed afterwards, thanks to an a priori upper bound on the minimizers which follows from the corresponding Euler–Lagrange equation. However, it turns out that the derivation of the latter requires additional regularity of the electrostatic potential \(\psi _u\). Such a regularity is actually not obvious, as the highest expected smoothness of the boundary of \(\Omega (u)\) is Lipschitz regularity (when the coincidence set \({\mathcal {C}}(u)\) is empty). Consequently, one needs to establish sufficient regularity for \(\psi _u\) both for states u with empty and with non-empty coincidence sets \({\mathcal {C}}(u)\). In particular, this will ensure a well-defined normal trace of the gradient of \(\psi _u\) on \(\Sigma (u)\) as required by (1.3c) and on the part of \({\mathfrak {G}}(u)\) lying above \(\Sigma (u)\) as required by (2.6a) below. The above mentioned difficulties are actually not the only ones that we face in the forthcoming analysis. To name but a few, the electrostatic energy \(E_e(u)\) features a nonlocal and intricate dependence upon the state u and appropriate continuity properties are needed in the minimizing procedure. This requires a thorough understanding of the dependence of \(\psi _u\) on the state u, this dependence being due to the domain \(\Omega (u)\) as well as the functions \(h_u\) and \({\mathfrak {h}}_u\). Also, due to the prescribed constraint \(u\ge -H\), the Euler–Lagrange equation solved by minimizers is in fact a variational inequality.
2 Main results
Throughout this work we shall assume that
As for the functions \(h_u\) and \({\mathfrak {h}}_u\) appearing in (1.3) we shall assume in the following that
satisfy
Assumption (2.1c) allows us later to rewrite (1.3) as an elliptic equation with homogeneous boundary conditions. In the following, we shall use the notation introduced in (1.4).
A simple example of boundary functions \((h,{\mathfrak {h}})\) satisfying (2.1b) and (2.1c) may be derived from [21, Example 5.5] with the scaling from [16]:
Example 2.1
Let \(V>0\) and set
and \({\mathfrak {h}}\equiv 0\). Then \((h,{\mathfrak {h}})\) clearly satisfies (2.1b) and (2.1c), the former being a consequence of the regularity (2.1a) of \(\sigma \). Note that \(h_u(x,u(x))=V, x\in D\), for a given state u; that is, in this example the electrostatic potential is kept at a constant value V along the elastic plate, see (1.3b).
2.1 The electrostatic potential
We first turn to the existence of an electrostatic potential for a given state u. To have an appropriate functional setting for u we introduce
and point out that \({\mathcal {C}}(u)=\emptyset \) if and only if u belongs to the interior of \({\bar{S}}\); that is, \(u\in S\), where
Note that \(H^2(D)\) is embedded in \(C({\bar{D}})\) so that \(\Omega (u)\) is well-defined for \(u\in {\bar{S}}\). Regarding the well-posedness of (1.3) we shall prove the following result.
Theorem 2.2
Suppose (2.1). For each \(u\in {\bar{S}}\) there exists a unique strong solution \(\psi _u\in H^2(\Omega (u))\) to (1.3). Moreover, given \(\kappa >0\) and \(r\in [2,\infty )\), there are \(c(\kappa )>0\) and \(c(r,\kappa )>0\) such that
for each \(u\in {\bar{S}}\) with \(\Vert u\Vert _{H^2(D)} \le \kappa \).
Theorem 2.2 is an immediate consequence of Lemma 3.1, Theorems 3.2, and (3.6) below.
2.2 Existence of energy minimizers
Owing to Theorem 2.2, the total energy is well-defined on the set
taking into account the clamped boundary conditions (1.1). We shall now focus on the existence of energy minimizers on \({\bar{S}}_0\). We have already observed that the total energy E is the sum of two terms \(E_m\) and \(E_e\) with different signs. Hence, the coercivity of E is not obvious. However, if \(\alpha >0\), the first order term in the mechanical energy \(E_m\) is quartic and thus dominates the negative contribution coming from the electrostatic energy \(E_e\). This property allows us to follow the lines of [21, Sect. 5] to derive the coercivity of E based on the following growth assumption for h: there is a constant \(K>0\) such that
for \((x,z,w)\in {\bar{D}} \times [-H,\infty ) \times [-H,\infty )\) and
This approach no longer works if \(\alpha =0\) and the coercivity of E is not granted. To remedy this drawback, we shall use a regularized energy functional (see (6.1) below), which includes a penalization term ensuring its coercivity if, in addition to (2.3), we assume that
and
for \((x,w) \in D \times [-H, \infty )\). We complete the analysis when \(\alpha =0\) by showing that minimizers of the regularized energy functional for a suitable choice of the penalization parameter give rise to a minimizer of E, establishing indirectly that E is bounded from below in that case as well. Consequently, in both cases we can prove the existence of at least one energy minimizer as stated in the next result.
Theorem 2.3
Assume (2.1) and (2.3) and, either \(\alpha >0\), or \(\alpha =0\) and (2.4). Then the total energy E has at least one minimizer \(u_*\) in \(\bar{S_0}\); that is, \(u_*\in \bar{S_0}\) and
At this point, no further qualitative information on energy minimizers \(u_*\) is available, and a particularly interesting question, which is yet left unanswered by our analysis, is whether the coincidence set \({\mathcal {C}}(u_*)\) is empty or not. Another interesting open issue is the uniqueness of minimizers. The proof of Theorem 2.3 is given in Sect. 6 for \(\alpha =0\) and in Sect. 7 for \(\alpha >0\).
2.3 Euler–Lagrange equation
We next aim at deriving the Euler–Lagrange equation satisfied by minimizers of the total energy E. Recalling the prescribed constraint \(u\ge -H\) for \(u\in \bar{S_0}\), we are dealing with an obstacle problem and the resulting equation is actually a variational inequality. For the precise statement we introduce, for a given \(u \in \bar{S}\), the function \(g(u):D\rightarrow {\mathbb {R}}\) by setting
for \(x\in D\setminus {\mathcal {C}}(u)\) while setting
for \(x\in {\mathcal {C}}(u)\). In fact, g(u) represents the electrostatic force exerted on the elastic plate and is computed as the differential (in a suitable sense) of the electrostatic energy \(E_e(u)\) with respect to u. We emphasize here that the regularity properties of \(\psi _u\) established in Theorem 2.2 are of utmost importance to guarantee that g(u) is well-defined on \(D\setminus {\mathcal {C}}(u)\), since it features the trace of \(\partial _z \psi _u\) on \({\mathfrak {G}}(u)\). With this notation, we are able to identify the variational inequality solved (in a weak sense) by energy minimizers.
Theorem 2.4
Assume (2.1). Assume that \(u\in \bar{S_0}\) is a minimizer of E on \({\bar{S}}_0\). Then \(g(u)\in L_2(D)\) and u is an \(H^2\)-weak solution to the variational inequality
where \(\partial {\mathbb {I}}_{\bar{S_0}}\) denotes the subdifferential of the indicator function \({\mathbb {I}}_{{\bar{S}}_0}\) of the closed convex subset \(\bar{S_0}\) of \(H^2(D)\); that is,
for all \(w\in \bar{S_0}\).
At this point, we do not know whether minimizers of E in \(\bar{S_0}\) are the only solutions to (2.7), a question closely connected to the uniqueness issue for (2.7). It is, however, expected that the set of solutions to (2.7) exhibits a complex structure. Indeed, in the much simpler situation studied in [18], the minimizer may coexist with other steady states, depending on the boundary values of the electrostatic potential.
The proof of Theorem 2.4 is given in Sect. 6 for \(\alpha =0\) and in Sect. 7 for \(\alpha >0\). It relies on the computation of the shape derivative of the electrostatic energy \(E_e(u)\), which is performed in Sect. 5.
Remark 2.5
It is also possible to minimize the total energy E on the set \({\bar{S}}\) (instead on \({\bar{S}}_0\)). Then the corresponding minimizer in \({\bar{S}}\) satisfies instead of the clamped boundary conditions (1.1) the Navier or pinned boundary conditions \(u(\pm L)=\partial _x^2 u(\pm L)=0\). With this change, the statements of Theorem 2.3 and Theorem 2.4 remain true when \(\bar{S}_0\) is replaced everywhere by \({\bar{S}}\).
Now, combining Theorem 2.3 and Theorem 2.4 we obtain the existence of a stationary configuration of the MEMS device given as a solution to the force balance (2.7):
Corollary 2.6
Assume (2.1) and (2.3) and, either \(\alpha >0\), or \(\alpha =0\) and (2.4). Then there is a solution \(u_*\in \bar{S}_0\) to the variational inequality (2.7).
The subsequent sections are dedicated to the proofs of the results stated in this section.
Throughout the paper, we impose assumptions (2.1) and set
3 Existence and \(H^2\)-regularity of the electrostatic potential \(\psi _u\)
This section is dedicated to the proof of Theorem 2.2; that is, to the existence and regularity of a unique solution \(\psi _u\) to (1.3). We first recall some basic properties of the boundary function \(h_v\) which are established in [21, Lemma 3.10] and rely on the properties (2.1b) and (2.1c) of h and \({\mathfrak {h}}\).
Lemma 3.1
Let \(M>0\).
(a) Given \(v\in {\bar{S}}\) satisfying \(-H\le v(x)\le M-H\) for \(x\in D\), the function \(h_v\) belongs to \(H^2(\Omega (v))\) and
(b) Consider a sequence \((v_n)_{n\ge 1}\) in \(\bar{S}\) and \(v\in {\bar{S}}\) such that
Let \(\Omega (M) := D\times (-H,M)\). Then
Proof
Integrating
with respect to \(y\in [-L,L]\) and taking into account the boundary condition \(v(\pm L)=0\), we obtain
Hence, by Hölder’s inequality we get
Using this inequality and the fact that h and its derivatives up to second order are bounded on \({\bar{D}}\times [-H,M]\times [-H,M]\) we derive
which yields (a). As for (b) we first note that (3.2) and the compact embedding of \(H^1(D)\) in \(C(\bar{D})\) ensure that
Combining this convergence with (3.2) and the continuity properties (2.1b) of h and \({\mathfrak {h}}\) readily gives (3.4) and (3.5), as well as (3.3) with the additional use of (3.2), see [21, Lemma 3.10]. \(\square \)
We shall now prove Theorem 2.2 and thus focus on (1.3), which is more conveniently considered with homogeneous boundary conditions. To this end, we introduce
for a given and fixed function \(v\in {\bar{S}}\). Due to assumption (2.1c), problem (1.3) (with v instead of u) is then equivalent to
Hence, the next result can be seen as a reformulation of Theorem 2.2 in terms of \(\chi _v\).
Theorem 3.2
Consider a function \(v\in {\bar{S}}\) and let \(\kappa >0\) be such that
Then there exists a unique strong solution \(\chi _v\in H^2(\Omega (v))\) to (3.7) and there is \(C(\kappa )>0\) depending only on \(\sigma \) and \(\kappa \) such that
Moreover, for any \(r\in [2,\infty )\), there is \(C(\kappa ) >0\) depending only on \(\sigma \) and \(\kappa \) such that
The remainder of this section is devoted to the proof of Theorem 3.2.
3.1 Variational solution to (3.7)
We first establish the existence of a variational solution to (3.7). To this end, we introduce for \(v\in {\bar{S}}\) the space \(H_B^1(\Omega (v))\) as the closure in \(H^1(\Omega (v))\) of the set
and shall then minimize the functional
with respect to \(\vartheta \in H_B^1(\Omega (v))\). Let us recall from [16, Lemma 2.2] that the trace \(\vartheta (\cdot ,-H)\in L_2(D)\) is well-defined for \(\vartheta \in H_B^1(\Omega (v))\) (see also Lemma 3.7 below for a complete statement), while Lemma 3.1 ensures that \(h_v\in H^1(\Omega (v))\) and that \(h_v(\cdot ,-H)\) and \({\mathfrak {h}}_v\) belong to \(L_2(D)\). Thus, \({\mathcal {G}}(v)[\vartheta ]\) is well-defined for \(\vartheta \in H_B^1(\Omega (v))\).
Proposition 3.3
Let \(v\in \bar{S}\). There is a unique variational solution \(\chi _v\in H_B^1(\Omega (v))\) to (3.7) given as the unique minimizer of the functional \({\mathcal {G}}(v)\) on \(H_B^1(\Omega (v))\). Moreover, \(\chi _v\) is also the unique minimizer on \(H_B^1(\Omega (v))\) of the functional \(G_D(v)\) defined by
Proof
As noted above, \({\mathcal {G}}(v)\) and \(G_D(v)\) are both well-defined on \(H_B^1(\Omega (v))\). Moreover, owing to the Poincaré inequality established in [16, Lemma 2.2], the functional \({\mathcal {G}}(v)\) is coercive on \(H_B^1(\Omega (v))\). It thus readily follows from the Lax-Milgram Theorem that there is a unique minimizer \(\chi _v\in H_B^1(\Omega (v))\) of the functional \({\mathcal {G}}(v)\) on \(H_B^1(\Omega (v))\). Let \(\vartheta \in H_B^1(\Omega (v))\). Since each connected component of \(\Omega (v)\) has at most two singular points, we infer from [15, Folgerung 7.5] that we may apply Gauß’ Theorem on each connected component of \(\Omega (v)\) and deduce from (2.1c) that
Consequently, \(\chi _v\) is also the unique minimizer of the functional \(G_D(v)\) on \(H_B^1(\Omega (v))\). \(\square \)
For further use we state the following weak maximum principle.
Lemma 3.4
Let \(v\in {\bar{S}}\). Then \(h_v\in C(\overline{\Omega (v)})\), \({\mathfrak {h}}_v\in C(\bar{D})\), and
Proof
We first observe that \(v\in C(\bar{D})\) which ensures, together with (2.1b), that
are well-defined and finite. Next, since \(\chi _v\) is the minimizer of \({\mathcal {G}}(v)\) on \(H_B^1(\Omega (v))\), it satisfies
for all \(\vartheta \in H_B^1(\Omega (v))\).
Now, it follows from the definition of \(\mu ^*\) that \(\vartheta ^* := (\chi _v + h_v - \mu ^*)_+\) belongs to \(H_B^1(\Omega (v))\) with \(\nabla \vartheta ^* = \mathrm {sign}_+ (\chi _v + h_v - \mu ^*) \nabla (\chi _v + h_v - \mu ^*)\). Consequently, by (3.12),
where we have used the non-negativity of both \(\mu ^* - {\mathfrak {h}}_v\) and \(\vartheta ^*\) to derive the last inequality. We have thereby proved that \(\nabla \vartheta ^*=0\) in \(L_2(\Omega (v))\), which implies that \(\vartheta ^*=0\) in \(L_2(\Omega (v))\) thanks to the Poincaré inequality established in [16, Lemma 2.2]. In other words, \(\chi _v + h_v - \mu ^*\le 0\) a.e. in \(\Omega (v)\) as claimed.
Finally, a similar argument with \(\vartheta _* := (\mu _*-\chi _v-h_v)_+\) leads to the inequality \(\mu _*-\chi _v-h_v\le 0\) a.e. in \(\Omega (v)\) and completes the proof. \(\square \)
We now improve the regularity of \(\chi _v\) as stated in Theorem 3.2 and show that \(\chi _v\) belongs to \(H^2(\Omega (v))\). Once this is shown, it then readily follows that \(\chi _v\) is a strong solution to (3.7) (see [16, Theorem 3.5]).
As pointed out previously, for a general \(v\in {\bar{S}}\), the set \(\Omega (v)\) may consist of several connected components without Lipschitz boundaries when the coincidence set \({\mathcal {C}}(v)\) is non-empty. The global \(H^2(\Omega (v))\)-regularity of \(\chi _v\) is thus clearly not obvious. The main idea is to write the open set \(D\setminus {\mathcal {C}}(v)\) as a countable union of disjoint open intervals \((I_j)_{j\in J}\), see [1, IX.Proposition 1.8], and to establish the \(H^2\)-regularity for \(\chi _v\) first locally on each component \(\left\{ (x,z)\in I_j\times {\mathbb {R}}\ :\ -H< z < v(x) \right\} \). This local regularity is performed in Sect. 3.2. The global \(H^2(\Omega (v))\)-regularity is subsequently established in Sect. 3.3.
3.2 Local \(H^2\)-regularity
Let \(I:=(a,b)\) be an open interval in D and consider
We define the open set \({\mathcal {O}}_I(v)\) by
and split its boundary \(\partial {\mathcal {O}}_I(v) = \partial {\mathcal {O}}_{I,D}(v) \cup \overline{\Sigma _I}\) with
where \(\Sigma _I := I \times \{-H\}\), and \(\overline{{\mathfrak {G}}_I(v)}\) denotes the closure of the graph \({\mathfrak {G}}_I(v)\) of v, defined by
We emphasize that \({\mathcal {O}}_I(v)\) has no Lipschitz boundary when \(v(a)+H= \partial _x v(a)=0\) or \(v(b)+H= \partial _x v(b)=0\), as these correspond to cuspidal boundary points, see Fig. 2.

Geometry of \({\mathcal {O}}_{I}(v)\) according to the boundary values of v
Let \(f\in L_2({\mathcal {O}}_I(v))\) be a fixed function. The aim is to investigate the auxiliary problem
We shall show the existence and uniqueness of a variational solution \(\zeta _v:=\zeta _{I,v}\in H^1({\mathcal {O}}_I(v))\) to (3.18) and then prove its \(H^2\)-regularity. The main difficulty encountered here is the just mentioned possible lack of Lipschitz regularity of \({\mathcal {O}}_I(v)\). Indeed, the trace of functions in \(H^1({\mathcal {O}}_I(v))\) on \(\partial {\mathcal {O}}_I(v)\) have no meaning yet in that case, and so (3.18b) and (3.18c) are not well-defined. We shall thus first give a precise meaning to traces for functions in \(H^1({\mathcal {O}}_I(v))\).
Remark 3.5
Clearly, if \(v\in S\), \(I=D\), and \(f=h_v\), then \(\chi _v=\zeta _{D,v}\), so that Theorem 3.2 follows from Theorem 3.9 below in that case. Furthermore, if \(I=(a,b)\) is a strict subinterval of D, \(f=h_v\), and \(v\in \bar{S}\) is such that \(v(a)=v(b) = -H\), or \(a=-L\) and \(v(-L)=v(b)+H=0\), or \(b=L\) and \(v(a)+H=v(L)=0\), then \(\zeta _{I,v}\) coincides – at least formally – with the restriction of \(\chi _v\) to I and we shall also deduce Theorem 3.2 from Theorem 3.9. We thus do not impose that \(v(a)=-H\) or \(v(b)=-H\) in (3.13), so as to be able to handle simultaneously the above mentioned different cases also depicted in Fig. 2.
3.2.1 Traces
As already noticed in [27], one can take advantage of the particular geometry of \({\mathcal {O}}_I(v)\), which lies between the graphs of two continuous functions, in order to define traces for functions in \(H^1({\mathcal {O}}_I(v))\) along these graphs. More precisely, one can derive the following result [16, Lemma 2.1].
Lemma 3.6
[16, Lemma 2.1] Assume that v satisfies (3.13) and set \(M_v := \Vert H+v\Vert _{L_\infty (I)}\).
- (a):
-
There is a linear bounded operator
$$\begin{aligned} \Gamma _{I,v} \in {\mathcal {L}}\left( H^1({\mathcal {O}}_I(v)) , L_2( I,(H+v)\mathrm {d}x) \right) \end{aligned}$$such that \(\Gamma _{I,v} \vartheta = \vartheta (\cdot ,v)\) for \(\vartheta \in C^1(\overline{{\mathcal {O}}_I(v)})\) and
$$\begin{aligned} \int _I |\Gamma _{I,v} \vartheta |^2 (H+v)\ \mathrm {d}x \le \Vert \vartheta \Vert _{L_2({\mathcal {O}}_I(v))}^2 + 2 M_v \Vert \vartheta \Vert _{L_2({\mathcal {O}}_I(v))} \Vert \partial _z \vartheta \Vert _{L_2({\mathcal {O}}_I(v))}\ . \nonumber \\ \end{aligned}$$(3.19) - (b):
-
There is a linear bounded operator
$$\begin{aligned} \gamma _{I,v} \in {\mathcal {L}}\left( H^1({\mathcal {O}}_I(v)) , L_2( I,(H+v)\mathrm {d}x) \right) \end{aligned}$$such that \(\gamma _{I,v} \vartheta = \vartheta (\cdot ,-H)\) for \(\vartheta \in C^1(\overline{{\mathcal {O}}_I(v)})\) and
$$\begin{aligned} \int _I |\gamma _{I,v}\vartheta |^2 (H+v)\ \mathrm {d}x \le \Vert \vartheta \Vert _{L_2({\mathcal {O}}_I(v))}^2 + 2 M_v \Vert \vartheta \Vert _{L_2({\mathcal {O}}_I(v))} \Vert \partial _z \vartheta \Vert _{L_2({\mathcal {O}}_I(v))}\ . \nonumber \\ \end{aligned}$$(3.20)
For simplicity, for \(\vartheta \in H^1({\mathcal {O}}_I(v))\), we use the notation
We next introduce the variational setting associated with (3.18) and define the space \(H_B^1({\mathcal {O}}_I(v))\) as the closure in \(H^1({\mathcal {O}}_I(v))\) of the set
Note that this is consistent with the previous definition of \(H_B^1(\Omega (v))\) when \(I=D\) and \(v\in {\bar{S}}\). We have already established in [16, Lemma 2.2] a Poincaré inequality in \(H_B^1({\mathcal {O}}_I(v))\), as well as refined properties of the trace on \(I\times \{-H\}\), which we recall now.
Lemma 3.7
[16, Lemma 2.2] Assume that v satisfies (3.13) and consider \(\vartheta \in H_B^1({\mathcal {O}}_I(v))\). Setting \(M_v := \Vert H+v\Vert _{L_\infty (I)}\), there holds
and the trace operator \(\vartheta \mapsto \vartheta (\cdot ,-H)\) maps \(H_B^1({\mathcal {O}}_I(v))\) to \(L_2(I)\) with
3.2.2 Variational solution to (3.18)
Thanks to Lemma 3.7, the trace on \(I\times \{-H\}\) of a function in \(H_B^1({\mathcal {O}}_I(v))\) is well-defined in \(L_2(I)\) and, thus, so is the functional
for \(\vartheta \in H_B^1({\mathcal {O}}_I(v))\). We now derive the existence of a unique variational solution to (3.18), or, equivalently, of a unique minimizer of \(G_I(v)\) on \(H_B^1({\mathcal {O}}_I(v))\).
Lemma 3.8
There is a unique variational solution \(\zeta _v:= \zeta _{I,v}\in H_B^1({\mathcal {O}}_I(v))\) to (3.18) which satisfies
where \(M_v := \Vert H+v\Vert _{L_\infty (I)}\).
Proof
It readily follows from (2.8), Lemma 3.7, and the Lax-Milgram Theorem that there is a unique variational solution \(\zeta _v\in H_B^1({\mathcal {O}}_I(v))\) to (3.18) in the sense that
Taking \(\vartheta \equiv 0\) in the previous inequality, we deduce from (3.21) and Hölder’s and Young’s inequalities that
Hence,
Combining the Poincaré inequality (3.21) and the above inequality completes the proof. \(\square \)
3.2.3 \(H^2\)-regularity of \(\zeta _v\)
We next investigate the regularity of the variational solution \(\zeta _v\) to (3.18); that is, we establish a local version of Theorem 3.2.
Theorem 3.9
Consider a function v satisfying (3.13) and let \(\kappa >0\) be such that
The variational solution \(\zeta _v =\zeta _{I,v}\in H_B^1({\mathcal {O}}_I(v))\) to (3.18) given by Lemma 3.8 belongs to \(H^2({\mathcal {O}}_I(v))\), and there is \(C_{1}(\kappa )>0\) depending only on \(\sigma \) and \(\kappa \) such that
Moreover, there is \(C_{2}(\kappa ) >0\) depending only on \(\sigma \) and \(\kappa \) such that, for any \(r\in [2,\infty )\),
Several difficulties are encountered in the proof of Theorem 3.9, due to the low regularity of the domain \({\mathcal {O}}_I(v)\) which has a Lipschitz boundary if \(v(a)>-H\) and \(v(b)>-H\) but may have cusps otherwise, see Fig. 2, and due to the mixed boundary conditions (3.18b) and (3.18c). As in [12, Sect. 3.3], to remedy these problems requires to construct suitable approximations of \({\mathcal {O}}_I(v)\) and to pay special attention to the dependence of the constants on v and I in the derivation of functional inequalities and estimates. To be more precise, we shall begin with the case where v satisfies
an assumption which is obviously stronger than (3.13). Then \({\mathcal {O}}_I(v)\) is a Lipschitz domain with a piecewise \(W_\infty ^3\)-smooth boundary and the \(H^2\)-regularity of \(\zeta _v\) is guaranteed by [5, Theorem 2.2], see Lemma 3.10 below. Next, transforming \({\mathcal {O}}_I(v)\) to the rectangle \({\mathcal {R}}_I := I\times (0,1)\), we shall adapt the proof of [12, Lemma 4.3.1.3] to establish the identity
in Lemma 3.11. We then shall show that the last two integrals on the right-hand side of (3.30) are controlled by the \(H^2\)-norm of \(\zeta _v\) with a sublinear dependence, a feature which will allow us to derive (3.27) when v satisfies (3.29). To this end, we shall use the embedding of the subspace
of \(H^1({\mathcal {O}}_I(v))\) in \(L_r({\mathcal {O}}_I(v))\) and the continuity of the trace operator from \(H_{WS}^1({\mathcal {O}}_I(v))\) to \(L_r({\mathfrak {G}}_I(v))\) for \(r\in [1,\infty )\), which involves constants that do not depend on \(\min _{[a,b]}\{v+H\}\), see Lemmas C.1-C.3 in Appendix C. After this preparation, we will be left with relaxing the assumption (3.29) to (3.13) and this will be achieved by an approximation argument, see Sect. 3.2.5.
3.2.4 \(H^2\)-regularity of \(\zeta _v\) when v satisfies (3.29)
Throughout this section, we assume that v satisfies (3.29) and fix \(M>0\) such that
We also denote positive constants depending only on \(\sigma \) by C and \((C_i)_{i\ge 3}\). The dependence upon additional parameters will be indicated explicitly.
We begin with the \(H^2\)-regularity of the variational solution \(\zeta _v\) to (3.18), which follows from the analysis performed in [3,4,5].
Lemma 3.10
\(\zeta _v\in H^2({\mathcal {O}}_I(v))\).
Proof
We first recast the boundary value problem (3.18) in the framework of [5]. Owing to (3.29), the boundary of the domain \({\mathcal {O}}_I(v)\) includes four \(W_\infty ^3\)-smooth edges \((\Gamma _i)_{1\le i \le 4}\) given by
and four vertices \((S_i)_{1\le i\le 4}\)
We set
and note that \({\mathcal {D}}_\Gamma \ne \emptyset \) as required in [5].
Since \(v\in W_\infty ^3(I)\), the measure \(\omega _i\) of the angle at \(S_i\) taken towards the interior of \({\mathcal {O}}_I(v)\) satisfies
For \(1\le i\le 4\), we denote the outward unit normal vector field and the corresponding unit tangent vector field by \(\varvec{\nu }_i\) and \(\varvec{\tau }_i\), respectively. According to the geometry of \({\mathcal {O}}_I(v)\),
We also define
and note that the measure \(\Psi _i\in [0,\pi ]\) of the angle between \(\varvec{\mu }_i\) and \(\varvec{\tau }_i\), \(1\le i \le 4\), is given by
We also set
We finally define the boundary operator
Now, on the one hand, the regularity of \(\sigma \) implies that [5, Assumption (1.5)] is satisfied, while [5, Assumption (1.6)] obviously holds since \({\mathcal {N}}=\emptyset \). On the other hand, we note that \(\varvec{\mu }_1(S_1) = - \varvec{\mu }_2(S_1)\) and \(\varvec{\mu }_4(S_4)=\varvec{\mu }_1(S_4)\), so that [5, Assumption (2.1)] is satisfied for \(i\in \{1,4\}\) (but not for \(i\in \{2,3\}\)). We then set \(\varepsilon _1=-1\) and \(\varepsilon _4=1\). We are left with checking [5, Assumptions (2.3)-(2.4)] but this is obvious due to (3.36). We finally observe that
is empty, since
for any \(m\in {\mathbb {Z}}\). We then infer from [5, Theorem 2.2] that \(\zeta _v\) has no singular part and thus belongs to \(H^2({\mathcal {O}}_I(v))\). \(\square \)
We now investigate the quantitative dependence of the just established \(H^2\)-regularity of \(\zeta _v\) on v and derive an \(H^2\)-estimate, which is related to the regularity of v. To this end, we need the following identity.
Lemma 3.11
The identity of Lemma 3.11 is reminiscent of [21, Lemma 3.5]. Its proof is rather technical and thus postponed to Appendix B.
The next step of the analysis is to show that the two integrals over I on the right-hand side of the identity stated in Lemma 3.11 can be controlled by the \(H^2\)-norm of \(\zeta _v\) with a mild dependence on v. To this end, we need some auxiliary functional and trace inequalities which are established in Appendix C. With this in hand, we begin with an estimate of the last integral.
Lemma 3.12
There is \(C_{3}(M)>0\) such that, for any \(r\in [2,\infty )\),
In particular, there is \(C_{4}(M)>0\) such that
Proof
To lighten notation, we set \({\mathcal {O}} := {\mathcal {O}}_I(v)\) and introduce \(P:= \partial _z \zeta _v - \sigma \zeta _v\). Since \(\zeta _v\in H^2({\mathcal {O}})\) by Lemma 3.10 and \(\sigma \in C^2(\bar{I})\), the function P belongs to \(H^1({\mathcal {O}})\) and satisfies (C.2) by (3.18b) and (3.18c). In addition, we observe that \(P(\cdot ,v)=\partial _z \zeta _v(\cdot ,v)\) by (3.18b). It then follows from Lemma C.3 that
Moreover, by (2.8) and Lemma 3.8,
and
Collecting the previous estimates, we end up with
from which (3.37) follows. We next deduce from (3.37) (with \(r=4\)) and Hölder’s inequality that
and the proof is complete. \(\square \)
We are now in a position to derive quantitative estimates in \(H^2\) for \(\zeta _v\), which only depends on the \(H^2\)-norm of v, even though v is assumed to be more regular.
Lemma 3.13
There is \(C_{5}(M)>0\) such that
Proof
To lighten notation, we set \({\mathcal {O}} := {\mathcal {O}}_I(v)\). We infer from (3.18a) and Lemma 3.11 that
Hence, thanks to (2.8), Lemma 3.12, and Hölder’s and Young’s inequalities,
Consequently, using once more Young’s inequality,
Now, since \(\zeta _v\in H^1_B({\mathcal {O}})\), it follows from (2.8), (3.32), and Lemma 3.8 that
Combining the above two estimates gives (3.39a).
To complete the proof of Lemma 3.13, we simply notice that (3.18a) ensures that
and deduce (3.39b) from (3.39a). \(\square \)
Summarizing, we have established the following result:
Proposition 3.14
Consider \(v\in H^2(I)\) satisfying (3.29); that is,
and fix \(\kappa >0\) such that
Then the elliptic boundary value problem (3.18) has a unique strong solution \(\zeta _v\in H^2({\mathcal {O}}_I(v))\) which satisfies
Proof
The existence and uniqueness of a strong solution \(\zeta _v\in H^2({\mathcal {O}}_I(v))\) to (3.18) are consequences of Lemma 3.8 and Lemma 3.10. Next, it readily follows from (3.40) and the continuous embedding of \(H^2(I)\) in \(W_\infty ^1(I)\) that there is \(M\ge 1\) depending on \(\kappa \) such that
Due to (3.43), we deduce (3.41) from (2.8), (3.40), Lemma 3.8, and Lemma 3.13, while (3.42) follows from (3.41) and Lemma 3.12. \(\square \)
We emphasize that, though derived for functions \(v\in H^2(I)\) satisfying the additional assumption (3.29), the estimates stated in Proposition 3.14 only depend on the \(H^2\)-norm of v and, neither on its \(W_\infty ^2\)-norm, nor on the value of its minimum (provided that it stays above \(-H\)). The outcome of Proposition 3.14 is thus likely to extend to any configuration depicted in Fig. 2 under the sole assumption (3.13) and this will be shown in the next section by an approximation argument.
3.2.5 \(H^2\)-regularity: Proof of Theorem 3.9
We now prove the \(H^2\)-regularity of \(\zeta _v\) as stated in Theorem 3.9. We thus assume that v satisfies (3.13); that is,
and fix \(\kappa >0\) such that \(\Vert v\Vert _{H^2(I)}\le \kappa \). Owing to the density of \(C^\infty ([a,b])\) in \(H^2(I)\) and since v satisfies (3.13), we employ classical approximation arguments to construct a sequence \((v_n)_{n\ge 1}\) of functions in \(C^\infty ([a,b])\) with the following properties:
A first consequence of (3.44a) and the continuous embedding of \(H^2(I)\) in \( W_\infty ^1(I)\) is that
According to (3.13) and (3.44b), the function \(v_n\) satisfies (3.29) for each \(n\ge 1\) and, since \({\mathcal {O}}_I(v)\subset {\mathcal {O}}_I(v_n)\), we infer from Proposition 3.14 that the strong solution \(\zeta _{v_n}\) to (3.18) with \(v_n\) instead of v (and f replaced by its trivial extension to \({\mathcal {O}}_I(v_n)\)) satisfies
Using again the inclusion \({\mathcal {O}}_I(v)\subset {\mathcal {O}}_I(v_n)\), we deduce from (3.46) that \((\zeta _{v_n})_{n\ge 1}\) is bounded in \(H^2({\mathcal {O}}_I(v))\). Consequently, recalling that \(H^1({\mathcal {O}}_I(v))\) is compactly embedded in \(L_2({\mathcal {O}}_I(v))\) (despite the non-Lipschitz character of \({\mathcal {O}}_I(v)\), see [23, Theorem 11.21] or [28, I.Theorem 1.4]), there are a subsequence of \((\zeta _{v_n})_{n\ge 1}\) (not relabeled) and \(\phi \in H^2({\mathcal {O}}_I(v))\) such that
Let us first check that \(\phi \in H_B^1({\mathcal {O}}_I(v))\). On the one hand, since both \(\phi \) and \(\zeta _{v_n}\) belong to \(H^1({\mathcal {O}}_I(v))\), we infer from (3.19) that
Hence, by (3.48),
On the other hand, since \(\zeta _{v_n}\in H_B^1({\mathcal {O}}_I(v_n))\) and \(v_n\ge v\), it follows from Lemma A.1 and (3.46) that
Hence, by (3.45),
Combining the previous two limits, we deduce
so that \(\phi \in H_B^1({\mathcal {O}}_I(v))\). In particular, for \(n\ge 1\), due to the inclusion \({\mathcal {O}}_I(v)\subset {\mathcal {O}}_I(v_n)\), the function \(\phi \) also belongs to \(H_B^1({\mathcal {O}}_I(v_n))\) and we infer from (3.22) and (3.48) that
We next recall that \(\zeta _{v_n}\) is the unique solution in \(H_B^1({\mathcal {O}}_I(v_n))\) to
for all \(\vartheta \in H_B^1({\mathcal {O}}_I(v_n))\). Now, since \(H_B^1({\mathcal {O}}_I(v)) \subset H_B^1({\mathcal {O}}_I(v_n))\), we can take \(\vartheta \in H_B^1({\mathcal {O}}_I(v))\) in (3.50) and use the convergences (3.48) and (3.49) to pass to the limit \(n\rightarrow \infty \) and conclude that \(\phi \in H_B^1({\mathcal {O}}_I(v))\) satisfies the variational formulation of (3.18). Therefore, Lemma 3.8 guarantees that \(\phi =\zeta _v\). We have thus shown that \(\zeta _v\in H^2({\mathcal {O}}_I(v))\) and it follows from (3.46) and (3.48) that
A further consequence of (3.20) and (3.48) is that \((\partial _x\zeta _{v_n}(\cdot ,-H))_{n\ge 1}\) converges to \(\partial _x\zeta _{v}(\cdot ,-H)\) in \(L_2(I,(H+v)\mathrm {d}x)\), which, together with the positivity of \(H+v\) in I, implies that \((\partial _x\zeta _{v_n}(\cdot ,-H))_{n\ge 1}\) converges to \(\partial _x\zeta _{v}(\cdot ,-H)\) in \(L_2(a+\varepsilon ,b-\varepsilon )\) for any \(\varepsilon \in (0,(b-a)/2)\). Combining this convergence with (3.46) and using Fatou’s lemma to take the limit \(\varepsilon \rightarrow 0\) give
Finally, by (3.19) and (3.46),
Hence, by (3.48),
Moreover, owing to Lemma A.1, (3.46), and the properties \(\zeta _{v_n}\in H_B^1({\mathcal {O}}_I(v_n))\) and \(v_n\ge v\),
and it follows from (3.45) that
Gathering (3.53) and (3.54) leads us to
Since \(H+v>0\) in I, we may extract a further subsequence (not relabeled) such that \((\partial _z\zeta _{v_n}(\cdot ,v_n))_{n\ge 1}\) converges a.e. in I to \(\partial _z\zeta _{v}(\cdot ,v)\). We then use Fatou’s lemma to pass to the limit \(n\rightarrow \infty \) in (3.47) and conclude that
thereby completing the proof of Theorem 3.9.
3.3 Global \(H^2\)-regularity of \(\chi _v\): Proof of Theorem 3.2 and Theorem 2.2
Finally, we prove Theorem 3.2 and Theorem 2.2 for which we consider an arbitrary function v in \({\bar{S}}\) and \(\kappa >0\) satisfying (3.8). According to [1, IX.Proposition 1.8] we can write the open set \(D\setminus {\mathcal {C}}(v)\) as a countable union of disjoint open intervals \((I_j)_{j\in J}\); that is,
Hence, \(\Omega (v)\) is the disjoint union of the open domains \({\mathcal {O}}_{I_j}(v)\). Now recall from Proposition 3.3 that \(\chi _v\in H_B^1(\Omega (v))\) is the unique minimizer on \(H_B^1(\Omega (v))\) of the functional
Furthermore, since \(\Delta h_v\) belongs to \(L_2(\Omega (v))\) by Lemma 3.1, it follows from the definition of \(H_B^1(\Omega (v))\) that
where \(G_{I_j}(v)[\vartheta ]\) is defined by (3.23) with \(f :=\Delta h_v {\mathbf {1}}_{{\mathcal {O}}_{I_j}(v)}\). Restricting to \(\vartheta \in H_B^1({\mathcal {O}}_{I_j}(v))\), it thus readily follows that \(\chi _v {\mathbf {1}}_{{\mathcal {O}}_{I_j}(v)}\) is a minimizer of \(G_{I_j}(v)\) on \(H_B^1({\mathcal {O}}_{I_j}(v))\). Consequently, \(\chi _v {\mathbf {1}}_{{\mathcal {O}}_{I_j}(v)} = \zeta _{I_j,v}\) by Lemma 3.8. Hence Theorem 3.9 yields
and
with constants \(C_{1}(\kappa )\) and \(C_{2}(\kappa ) \) not depending on \(I_j\). Therefore, summing with respect to \(j\in J\), we conclude that \(\chi _v\in H^2(\Omega (v))\) and satisfies (3.9) and (3.10), since \(\Vert \Delta h_v\Vert _{L_2(\Omega (v))}\le c(\kappa )\) by Lemma 3.1. Therefore, as in [16, Theorem 3.5], we may use the version of Gauß’ Theorem stated in [15, Folgerung 7.5] in the variational characterization of \(\chi _v\) featuring \({\mathcal {G}}(v)\) to deduce that \(\chi _v\in H^2(\Omega (v))\) is indeed a strong solution to (3.7). This proves Theorem 3.2. Owing to (3.6) and Lemma 3.1, this also entails Theorem 2.2.
4 Continuity of \(\chi _v\) with respect to v
In this section we derive continuity properties of \(\chi _v\) and its gradient trace \(\partial _z\chi _v(\cdot , v)\) with respect to \(v\in {\bar{S}}\). The latter will also yield the continuity of the function g defined in (2.6). Throughout this section we denote positive constants depending only on \(\sigma \) by C. The dependence upon additional parameters will be indicated explicitly.
4.1 \(H^1\)-Continuity: \(\Gamma \)-convergence of \({\mathcal {G}}\)
Let us recall that, according to Proposition 3.3, \(\chi _v\) is the unique minimizer on \(H_B^1(\Omega (v))\) of the functional \({\mathcal {G}}(v)\) introduced in (3.11) as
for \(\vartheta \in H_B^1(\Omega (v))\). Now, in order to derive continuity properties of \(\chi _v\) (and \(\psi _v\)) with respect to \(v\in {\bar{S}}\), we first prove a \(\Gamma \)–convergence result for the set of functionals \(\{{\mathcal {G}}(v)\,,\, v\in {\bar{S}}\}\). More precisely, given \(M>0\) we set as before \(\Omega (M) := D\times (-H,M)\) and, for \(v\in {\bar{S}}\) such that \(v\le M-H\), we extend the functional \({\mathcal {G}}(v)\) to \(L_2(\Omega (M))\) by defining
With these notations we have:
Proposition 4.1
Let \(M>0\) and consider a sequence \((v_n)_{n\ge 1}\) in \(\bar{S}\) and \(v\in {\bar{S}}\) such that
Then
Proof
The proof is very similar to that of [21, Proposition 3.11].
(i) Asymptotic weak lower semi-continuity. Given a sequence \((\vartheta _n)_{n\ge 1}\) in \(L_2(\Omega (M))\) and \(\vartheta \in L_2(\Omega (M))\) satisfying
we shall show that
We may assume without loss of generality that
Let \(n\ge 1\) and denote the extension by zero of \(\vartheta _n\) to \(\Omega (M)\setminus \Omega (v_n)\) by \(\vartheta _n\). Then \(\vartheta _n\in H_B^1(\Omega (M))\) and it follows from (4.1), (4.2), (4.4), and Lemma 3.1 (b) that the sequence \((\vartheta _n)_{n\ge 1}\) is bounded in \(H_B^1(\Omega (M))\). Since \(\Omega (M)\) is a Lipschitz domain, the compactness of the embedding of \(H^1(\Omega (M))\) in \(H^{3/4}(\Omega (M))\) [12, Theorem 1.4.3.2], the continuity of the trace operator from \(H^{3/4}(\Omega (M))\) to \(L_2(\partial \Omega (M))\) (see, e.g., [12, Theorem 1.5.1.2], [26], or [34, Satz 8.7]) and (4.2) ensure that there is a subsequence of \((\vartheta _n)_{n\ge 1}\) (not relabeled) such that
In particular, \(\vartheta \in H^1(\Omega (v))\) and its trace \(\vartheta (\cdot ,v)\) is well-defined in \(L_2(D,(H+v)\,\mathrm {d}x)\) according to Lemma 3.6. Similarly, for each \(n\ge 1\), \(\vartheta \in H^1(\Omega (v_n))\) and its trace \(\vartheta (\cdot ,v_n)\) is well-defined in \(L_2(D,(H+v_n)\,\mathrm {d}x)\). Consequently, for \(n\ge 1\),
On the one hand, by Lemma A.1 and (4.1),
On the other hand, since \(\vartheta _n\in H_B^1(\Omega (v_n))\), we infer from (4.1) and Lemma 3.6 that
Now, it readily follows from (4.1), (4.2), (4.5), (4.8), (4.9), and the continuous embedding of \(H_0^1(D)\) in \(C(\bar{D})\) that the right-hand side of (4.7) converges to zero as \(n\rightarrow \infty \). Therefore,
and we use Fatou’s lemma to conclude that
Combining this result with (4.5) and (4.6) implies that
Now, we infer from (3.3), (4.1), (4.5), (4.10), and the continuous embedding of \(H_0^1(D)\) in \(C(\bar{D})\) that
Also, from (4.6) and Lemma 3.1 we deduce that
Gathering the outcome of the above analysis gives (4.3).
(ii) Recovery sequence. Consider \(\vartheta \in H_B^1(\Omega (v))\) and introduce the function \({\bar{\vartheta }}\) defined on
by
which is the extension of \(\vartheta \) by zero in \(\Omega (M)\setminus \Omega (v)\) and the reflection of the thus obtained function to \(D\times (-2H-M,-H)\). Then \({{\bar{\vartheta }}}\in H_0^1({{\hat{\Omega }}}(M))\), so that \(F:=-\Delta {{\bar{\vartheta }}}\in H^{-1}({{\hat{\Omega }}}(M))\).
Let \(n\ge 1\). Since
the distribution F can also be considered as an element of \(H^{-1}({{\hat{\Omega }}}(v_n))\) by restriction. Then there is a unique variational solution \({{\hat{\vartheta }}_n\in } H_0^1({{\hat{\Omega }}}(v_n))\subset H_0^1({{\hat{\Omega }}}(M))\) to
Owing to (4.1) and the continuous embedding of \(H_0^1(D)\) in \(C(\bar{D})\),
where \(d_H\) stands for the Hausdorff distance in \({{\hat{\Omega }}}(M)\), see [14, Sect. 2.2.3]. Since \(\overline{{{\hat{\Omega }}}(M)}\setminus {{\hat{\Omega }}}(v_n)\) has a single connected component for all \(n\ge 1\), it follows from [33, Theorem 4.1] and [14, Theorem 3.2.5] that \({{{\hat{\vartheta }}_n\rightarrow }} {{\hat{\vartheta }}}\) in \(H_0^1({{\hat{\Omega }}}(M))\), where \({{{\hat{\vartheta }}_n\in }} H_0^1({{\hat{\Omega }}}(M))\) is the unique variational solution to
Clearly, \({{\hat{\vartheta }}}={{\bar{\vartheta }}}\) by uniqueness, so that \( {\hat{\vartheta }}_n \rightarrow {{\bar{\vartheta }}}\) in \(H_0^1({\hat{\Omega }}(M))\). Setting \(\vartheta _n := {{\hat{\vartheta }}_n} {\mathbf {1}}_{\Omega (v_n)}\in H^1(\Omega (M))\), \(n\ge 1\), this convergence implies that
Since \(\vartheta _n=0\) in \(\Omega (M)\setminus \Omega (v_n)\) we obtain from (3.3), (4.1), and (4.11) that
Moreover, the continuity of the trace from \(H^1(\Omega (M))\) to \(L_2(D\times \{-H\})\) and (4.11) entail that
These two properties, along with (3.4) and (3.5), imply that
that is, \((\vartheta _n)_{n\ge 1}\) is a recovery sequence for \(\vartheta \) and the claim is proved. \(\square \)
The Fundamental Theorem of \(\Gamma \)-convergence, see [9, Corollary 7.20], then yields the following continuous dependence of \(\chi _v\) on \(v\in {\bar{S}}\):
Corollary 4.2
Suppose (4.1) and assume further that there is \(\kappa >0\) such that
Then
and, for \(r \in [1, \infty \)),
Proof
It readily follows from (4.1), (4.12), and Theorem 3.2 that
and thus relatively compact in \(L_2(\Omega (M))\) by [12, Theorem 1.4.5.2]. According to Proposition 4.1, we deduce from the Fundamental Theorem of \(\Gamma \)-convergence, see [9, Corollary 7.20], that any cluster point of \((\chi _{v_n})_{n\ge 1}\) in \(L_2(\Omega (M))\) is a minimizer of \({\mathcal {G}}(v)\) and thus coincides with \(\chi _v\) by Proposition 3.3. Therefore,
and, using once more [9, Corollary 7.20], we obtain (4.13).
We are left with proving (4.14). To this end, we first observe that, since \(\Omega (M)\) is a Lipschitz domain, [12, Theorem 1.4.3.2, Theorem 1.4.5.2] imply that \(H^1(\Omega (M))\) compactly embeds in \(W_q^{3/2q}(\Omega (M))\) for \(q\ge 2\). Thus, the continuity of the trace operator from \(W_q^{3/2q}(\Omega (M))\) to \(L_q(\partial \Omega (M))\) (see [12, Theorem 1.5.1.2] and [26]), along with (4.15) and (4.16), ensure that there is a subsequence of \((\chi _{v_n})_{n\ge 1}\) (not relabeled) such that
Notice that (4.18) yields the second assertion of (4.14). It now follows from (3.3), (3.4), (3.5), (4.13), and (4.18) that
This property, along with (3.3) and (4.17), guarantees that \((\nabla \chi _{v_n})_{n\ge 1}\) converges to \(\nabla \chi _v\) in \(L_2(\Omega (M))\) and the proof of (4.14) is complete. \(\square \)
4.2 Continuity of \(\partial _z\chi _v(\cdot , v)\) with respect to v
Finally, in order to establish the continuity of the function g defined in (2.6) we need also to investigate the continuous dependence of the gradient trace \(\partial _z\chi _v(\cdot , v)\) on \(v\in {\bar{S}}\), the main difficulty arising when \({\mathcal {C}}(v)\not =\emptyset \). In this regard we note:
Proposition 4.3
Consider \(v \in \bar{S}\) and a sequence \((v_n)_{n\ge 1}\) in \(\bar{S}\) such that
Then
where \(\ell (v)\) is given by
Proof
Thanks to (4.19) and the continuous embedding of \(H^2(D)\) in \(L_\infty (D)\), we may fix \(M>H\) (only depending on \(\kappa \)) such that
Step 1. We first establish an estimate ensuring that there is no concentration of \(\partial _z\chi _v(\cdot ,v)\) on small subsets of \(D\setminus {\mathcal {C}}(v)\). Indeed, since \(\chi _v\in H^2(\Omega (v))\) we have \(\chi _v(x,\cdot )\in H^2((-H,v(x)))\) for a.a. \(x\in D\setminus {\mathcal {C}}(v)\), so that it follows from the boundary conditions (3.18b) and (3.18c) that
for a.a. \(x\in D\setminus {\mathcal {C}}(v)\). Thus, for an arbitrary measurable subset \(E \subset D\setminus {\mathcal {C}}(v)\), we infer from Hölder’s inequality that
Clearly, the same proof implies that, for any \(n\ge 1\) and arbitrary measurable subset \(E \subset D\setminus {\mathcal {C}}(v_n)\),
Step 2. We next handle the behavior of \(\partial _z \chi _v(\cdot ,v)\) where v stays away from \(-H\). To this end, let \(\varepsilon \in (0,H/2)\) and define
which is a non-empty open subset of D, since \(v\in C(\bar{D})\) with \(v(\pm L)=0\). We can thus write it as a countable union of disjoint open intervals \((\Lambda _j(\varepsilon ))_{j\in J}\), see [1, IX.Proposition 1.8]. Also, owing to (4.19) and the continuous embedding of \(H^1(D)\) in \(C(\bar{D})\), there is \(n_\varepsilon \ge 1\) such that
A straightforward consequence of (4.23) and (4.24) is that
Therefore, the function \(X_{n,\varepsilon }\), given by
is well-defined. Let \(j\in J\) and \(n\ge n_\varepsilon \). Since \(\partial _z \chi _v\) and \(\partial _z \chi _{v_n}\) belong to \(H^1({\mathcal {O}}_{\Lambda _j(\varepsilon )}(v-\varepsilon ))\), the set \({\mathcal {O}}_{\Lambda _j(\varepsilon )}(v-\varepsilon )\) being defined in (3.14), it follows from (3.19), (4.21), and the definition of \(\Lambda (\varepsilon )\) that
Summing the above inequality over \(j\in J\) and noticing that
by Cauchy-Schwarz’ inequality, (4.19), and Theorem 3.2, we obtain
We now infer from (4.14) and the above inequality that
We next set
Using (4.24) and Hölder’s and Young’s inequalities, we obtain, for \(j\in J\),
Summing over \(j\in J\) and using (4.19) and Theorem 3.2 give
Owing to (4.26), we may take the limit \(n\rightarrow \infty \) in the previous inequality and obtain
Since \(\Lambda (\varepsilon )\subset \Lambda (\delta )\) for all \(\delta \in (0,\varepsilon )\), we infer from the above inequality that
and we may pass to the limit \(\delta \rightarrow 0\) to conclude that
Step 3. Finally, we infer from (4.19), (4.21), (4.22), and Theorem 3.2 that
Since \(0\le H+v\le 2\varepsilon \) and \(0\le H+v_n\le 3\varepsilon \) in \(D\setminus \Lambda (\varepsilon )\) for \(n\ge n_\varepsilon \) by (4.23) and (4.24), we further obtain
We now first let \(n\rightarrow \infty \) with the help of (4.27) and then take the limit \(\varepsilon \rightarrow 0\) to conclude that
Finally, given \(r\in [1,\infty )\), we infer from Hölder’s inequality, Lemma 3.1, (3.10), and (4.19) that
and the assertion follows from (4.28). \(\square \)
Summarizing the outcome of this section, we have obtained continuity properties of the electrostatic energy \(E_e\) and the function g introduced in (2.6).
Theorem 4.4
The electrostatic energy \(E_e: \bar{S} \rightarrow {\mathbb {R}}\) is continuous for the weak topology of \(H^2(D)\). The function \(g: \bar{S} \rightarrow L_r(D)\) is continuous for each \(r \in [1,\infty )\), the set \(\bar{S}\) being still endowed with the weak topology of \(H^2(D)\).
Proof
Let us first recall that, if \((v_n)_{n\ge 1}\) is a sequence in \(\bar{S}\) converging weakly in \(H^2(D)\) to \(v\in \bar{S}\), then there is \(\kappa >0\) such that (4.12) and (4.19) hold true. Consequently, we infer from Corollary 4.2 that
thereby establishing the stated continuity of \(E_e\). Next, let \(v\in \bar{S}\). Since \(\partial _x v=0\) a.e. in \({\mathcal {C}}(v)\), it follows from (2.6) and Proposition 4.3 that
for \(x\in D\). The stated continuity of g then readily follows from Proposition 4.3 and the \(C^1\)-regularity of h and \({\mathfrak {h}}\) (see also Lemma 3.1(b)). \(\square \)
5 Shape derivative of the electrostatic energy
In this section we investigate differentiability properties of the electrostatic energy
with respect to \(u\in {\bar{S}}\), where \(\psi _u\) is the strong solution to (1.3), see Theorem 2.2. Owing to the dependence of \(\psi _u\) on the domain \(\Omega (u)\) this resembles the computation of a shape derivative, a topic which has received considerable attention in recent years, see [8, 14, 32] and the references therein. Note that we may write alternatively \(E_e(u)=-{\mathcal {G}}(u)[\psi _u-h_u]\), since \(\chi _u= \psi _u-h_u\) is the strong solution to (3.7) (with \(v=u\)) given by Theorem 3.2.
As might be expected, the switch between boundary conditions for \(\psi _u\) when \({\mathcal {C}}(u)\ne \emptyset \) generates additional difficulties and we begin with the differentiability of \(\psi _u\) with respect to \(u\in S\).
Lemma 5.1
Let \(u\in S\) be fixed and define, for \(v\in S\), the transformation \( \Theta _v:\Omega (u)\rightarrow \Omega (v) \) by
Then there exists a neighborhood U of u in S such that the mapping
is continuously differentiable, where \(\chi _v=\psi _v-h_v\in H_B^1(\Omega (v))\) solves (3.7), see Theorem 3.2, and S is endowed with the \(H^2(D)\)-topology.
Proof
The proof follows the lines of [14, Theorem 5.3.2], a similar proof is given in [21, Lemma 4.1]. We thus only provide a very brief sketch here. Let \(u\in S\) and \(v\in S\). Setting \(\xi _v:=\chi _v\circ \Theta _v\) and performing a change of variables \(({\bar{x}},{\bar{z}})=\Theta _v(x,z)\), the weak formulation (3.12) satisfied by \(\chi _v\) (as a critical point of \({\mathcal {G}}(v)\)) can be written in the form
for \(\phi \in H_B^1(\Omega (u))\), where \(J_v:= |\mathrm {det}(D\Theta _v)|\). Therefore, (5.1) is equivalent to
for some Fréchet differentiable function
One then uses the Implicit Function Theorem to derive that \(\xi _v\) depends smoothly on v. \(\square \)
As a next step we establish the Fréchet differentiability of \(E_e\) on the open set S. For \(u\in S\) recall that g(u) is given by (2.6a) since \({\mathcal {C}}(u)=\emptyset \) in this case.
Proposition 5.2
Let S be endowed with the \(H^2(D)\)-topology. Then the electrostatic energy \(E_e: S \rightarrow {\mathbb {R}}\) is continuously Fréchet differentiable with
for \(u\in S\) and \(\vartheta \in H^2(D)\cap H^1_0(D)\).
Proof
In this proof we shall use the notation from Lemma 5.1. We fix \(u\in S\) and recall from Lemma 5.1 that the mapping \(v \mapsto \xi _v = \chi _v \circ \Theta _v\) is continuously differentiable with respect to v in a neighborhood U of u in S and takes values in \(H^1_B(\Omega (u))\). With \(\psi _v = \chi _v + h_v\), \(J_v=\vert \mathrm {det}(D\Theta _v)\vert \), and the change of variables \(({\bar{x}},{\bar{z}})=\Theta _v(x,z)\), we obtain that, for \(v \in U\),
We introduce the functions
Then, recalling that h and \({\mathfrak {h}}\) are \(C^1\)-functions in all their arguments by (2.1b), we conclude that the Fréchet derivative of \(E_e\) at u applied to \(\vartheta \in H^2(D)\cap H^1_0(D)\) is given by
On the one hand, we argue as in the proof of [21, Equation (4.12)] to show that
On the other hand, since \(m(u) = \psi _u(\cdot ,-H) - {\mathfrak {h}}_u\) in D and
we see that
The above two identities yield
Next we shall simplify the right-hand side of (5.3). Using Gauß’ Theorem, the fact that \(\psi _u\) is a strong solution to (1.3a), \(\vartheta =0\) on \(\partial D\), and the fact that \(\partial _v \xi _v [\vartheta ]\vert _{v=u}\) belongs to \(H^1_B(\Omega (u))\), the first integral on the right-hand side of (5.3) can be rewritten in the form
Since, due to (1.3c),
it follows that
We next proceed as in [21, p. 486] to simplify the second integral on the right-hand side of (5.3) and show that it can be written
Combining this identity with (5.3) and (5.4) yields
Since (1.3b) entails \(\psi _u(x,u(x))= h(x,u(x),u(x))\), \(x\in D\), we have
and hence, for \(x\in D\),
Inserting this identity into (5.5) gives
according to (2.6a). Finally, the continuity of
readily follows from Theorem 4.4. \(\square \)
We finally provide the differentiability property of \(E_e\) on the closed set \({\bar{S}}\). More precisely, we show that \(E_e\) admits a directional derivative at a point \(u\in {\bar{S}}\) in any direction of \(-u+S\), which is given by g(u) defined in (2.6). Recall that \({\mathcal {C}}(u)\) may be non-empty in this case.
Proposition 5.3
Let \(u\in {\bar{S}}\) and \(w\in S\). Then
Proposition 5.3 is a rather immediate consequence of Theorem 4.4, Proposition 5.2, and the observation that \(u+s(w-u)=(1-s)u+sw \in S\) for all \(u\in \bar{S}\), \(w\in S\), and \(s\in (0,1]\). We refer to [21, Corollary 4.3] for a detailed proof.
6 Proofs of Theorem 2.3 and Theorem 2.4 for \(\alpha =0\)
In this section we deal with the case \(\alpha =0\) and recall that the total energy is then given by
with mechanical energy
and electrostatic energy
6.1 Existence of a minimizer of a regularized energy
As already noted in [21], the boundedness from below of the functional E is a priori unclear since \(\alpha =0\). To cope with this issue, we work with the regularized functional given by
for \(k\ge H\), where
and the constant K is introduced in (2.4).
Lemma 6.1
For each \(k\ge H\), the functional \({\mathcal {E}}_k\) is bounded from below with
for some constant \(c(k)>0\).
Proof
By (2.3), (2.8), and Proposition 3.3,
Now, since \(u\in {\bar{S}}\),
and we further obtain with the help of Young’s inequality that
Using this estimate in the definition of \({\mathcal {E}}_k(u)\) along with
we derive
thereby completing the proof. \(\square \)
Due to the weak lower semicontinuity of \(E_m\) in \(H^2(D)\) and the continuity of \(E_e\) with respect to the weak topology of \(H^2(D)\) (see Theorem 4.4), Lemma 6.1 allows us to apply the direct method of the calculus of variations to derive the existence of a minimizer of \({\mathcal {E}}_k\) in \(\bar{S}_0\).
Corollary 6.2
For each \(k\ge H\), the functional \({\mathcal {E}}_k\) has at least one minimizer \(u_k\in {\bar{S}}_0\); that is,
6.2 Derivation of the Euler–Lagrange equation for the regularized energy
We shall next identify the Euler–Lagrange equation satisfied by a minimizer of the regularized energy \({\mathcal {E}}_k\) on \({\bar{S}}_0\).
Proposition 6.3
Let \(k\ge H\) and let \(u\in \bar{S_0}\) be a minimizer of \({\mathcal {E}}_k\) on \({\bar{S}}_0\). Then u is an \(H^2\)-weak solution to the variational inequality
where \(\partial {\mathbb {I}}_{\bar{S_0}}\) is the subdifferential of the indicator function \({\mathbb {I}}_{{\bar{S}}_0}\) of the closed convex subset \(\bar{S_0}\) of \(H^2(D)\); that is,
for all \(w\in \bar{S_0}\).
Proof
Let \(k\ge H\) be fixed. Consider a minimizer \(u\in \bar{S_0}\) of \({\mathcal {E}}_k\) on \(\bar{S_0}\) and fix \(w\in S_0 := \bar{S}_0\cap S\). Owing to the convexity of \(\bar{S_0}\), the function \(u+s(w-u)=(1-s)u+sw\) belongs to \(S_0\) for all \(s\in (0,1]\) and the minimizing property of u guarantees that
Since \(u\in \bar{S}_0\subset \bar{S}\) and \(w\in S_0\subset S\), Proposition 5.3 implies that
for all \(w\in S_0\). Since \(S_0\) is dense in \(\bar{S_0}\) and (u, g(u)) belongs to \(H^2(D)\times L_2(D)\), this inequality also holds for any \(w\in \bar{S_0}\). \(\square \)
Proposition 6.4
There is \(\kappa _0 \ge H\) depending only on K such that, if \(u\in \bar{S_0}\) is any solution to the variational inequality (6.3) with \(k\ge H\), then \(\Vert u\Vert _{L_\infty (D)}\le \kappa _0\).
Proof
Owing to the continuous embedding of \(H_0^1(D)\) in \(C(\bar{D})\), the function u belongs to \(C(\bar{D})\) with \(u(\pm L)=0\). Consequently, the set \(\{ x \in D\,:\, u(x)>-H\}\) is a non-empty open subset of D and we can write it as a countable union of disjoint open intervals \((I_j)_{j\in J}\), see [1, IX.Proposition 1.8]. Using once more the property \(u(\pm L)=0>-H\), we may assume without loss of generality that \(I_0=(-L,a_0)\) and \(I_1=(b_0,L)\) for some \(-L<a_0<b_0<L\), and \(\bar{I}_j\subset (-L,L)\) for \(j\in J\) with \(j\ge 2\).
Step 1: Thanks to (2.3b) and (2.4a), we infer from Lemma 3.4 that \(|\psi _u|\le K\) in \(\Omega (u)\). Combining this bound with (2.3), (2.4), (2.6), and (2.8) readily gives
Step 2: Consider first \(j\in J\) with \(j\ge 2\) and let \(\theta \in {\mathcal {D}}(I_j)\). Since \(u>-H\) in the support of \(\theta \), the function \(u\pm \delta \theta \) belongs to \(S_0\) for \(\delta >0\) small enough. We thus infer from (6.3b) that
hence
Consequently, using the function \(S_{I_j}\) defined in Proposition D.1, we realize that \(u-S_{I_j} \in H^2(I_j)\) is a weak solution to the boundary value problem
the boundary conditions (6.5b) being a consequence of the definition of \(I_j\), \(j\ge 2\), the \(H^2(D)\)-regularity of u, and the constraint \(u\ge -H\). Taking into account that \(g(u)+A (u-k)_+\in L_2(I_j)\) by Theorem 4.4, classical elliptic regularity theory implies that \( u-S_{I_j}\in H^4(I_j)\) is a strong solution to (6.5). Since the right hand side of (6.5a) is non-positive due to (6.4), it now follows from a version of Boggio’s comparison principle [7, 13, 17, 29] that \(u-S_{I_j} < 0\) in \(I_j\), so that \(u(x)\le \kappa _0\) for \(x\in \bar{I}_j\) and \(j\ge 2\) by Proposition D.1.
Step 3: We next handle the case \(j=0\) in which \(I_0=(-L,a_0)\). We first argue as in the previous step to conclude that
for all \(\theta \in {\mathcal {D}}(I_0)\) and that \(u(-L)=\partial _x u(-L)=u(a_0)+H = \partial _x u(a_0)=0\). Consequently, we infer from (6.6) and Proposition D.1 that \(u-S_{I_0}\in H^2(I_0)\) is a weak solution to the boundary value problem
We then argue as in Step 2 to establish that \(u-S_{I_0} < 0\) in \(I_0=(-L,a_0)\). Hence, \(u\le \kappa _0\) in \([-L,a_0]\) by Proposition D.1.
Step 4: For \(j=1\) (\(I_1=(b_0,L)\)), we proceed as in Step 3 using Proposition D.1 to deduce that \(u\le \kappa _0\) in \([b_0,L]\). This completes the proof. \(\square \)
6.3 Proof of Theorem 2.3 for \(\alpha =0\)
Let \(k\ge H\) and consider a minimizer \(u_k\in {\bar{S}}_0\) of the functional \({\mathcal {E}}_k\) on \({\bar{S}}_0\) as provided by Corollary 6.2. Then, \(-H\le u_k\le \kappa _0\) in D according to Proposition 6.4. Therefore, if \(k\ge \kappa _0\), then
Now, it follows from Lemma 6.1 and the fact that \(0\in \bar{S}_0\) that, for \(k\ge \kappa _0\),
Therefore, \((u_k)_{k\ge \kappa _0}\) is bounded in \(H^2(D)\) and there is a subsequence of \((u_k)_{k\ge \kappa _0}\) (not relabeled) which converges weakly in \(H^2(D)\) and strongly in \(H^1(D)\) towards some \(u_*\in {\bar{S}}_0\). Due to the weak lower semicontinuity of \(E_m\) in \(H^2(D)\) and the continuity of \(E_e\) with respect to the weak topology of \(H^2(D)\) (see Theorem 4.4), we readily infer from (6.7) that
after taking into account that
Consequently, \(u_*\in {\bar{S}}_0\) is a minimizer of E on \({\bar{S}}_0\). This proves Theorem 2.3.
6.4 Proof of Theorem 2.4 for \(\alpha =0\)
Let \(u\in {\bar{S}}_0\) be any minimizer of E on \({\bar{S}}_0\). Proceeding as in the proof of Proposition 6.3, this implies that \(u\in {\bar{S}}_0\) is an \(H^2\)-weak solution to the variational inequality
which completes the proof of Theorem 2.4.
7 Proofs of Theorem 2.3 and Theorem 2.4 for \(\alpha >0\)
Consider now \(\alpha >0\). In that case, the total energy is given by
with mechanical energy
and electrostatic energy
Observe that, since \(\alpha >0\), the mechanical energy \(E_m\) features a super-quadratic term in \(\Vert \partial _x u\Vert _{L_2(D)}\) which has the following far-reaching consequence, which is shown as in the proof of [21, Theorem 5.1], with the help of (2.3), (2.8), and Proposition 3.3 for the derivation of an appropriate upper bound on \(-E_e(u)\), see the proof of Lemma 6.1.
Lemma 7.1
The functional E is bounded from below with
for some constant \(c>0\).
Once Lemma 7.1 is established, the existence of a minimizer of E on \({\bar{S}}_0\) follows from the weak lower semicontinuity of \(E_m\) in \(H^2(D)\) and the continuity of \(E_e\) with respect to the weak topology of \(H^2(D)\) (see Corollary 4.2) by the direct method of the calculus of variations, hence Theorem 2.3 for \(\alpha >0\) (see also [21, Theorem 5.1]). As for the proof of Theorem 2.4 for \(\alpha >0\), it is the same as that for \(\alpha =0\), see Sect. 6.4.
References
Amann, H., Escher, J.: Analysis. III. Birkhäuser Verlag, Basel (2009)
Ambati, V. R., Asheim, A., van den Berg, J. B., van Gennip, Y., Gerasimov, T., Hlod, A., Planqué, B., van der Schans, M., van der Stelt, S., Vargas Rivera, M., Vondenhoff, E.: Some studies on the deformation of the membrane in an RF MEMS switch, in Proceedings of the 63rd European Study Group Mathematics with Industry, O. Bokhove, J. Hurink, G. Meinsma, C. Stolk, and M. Vellekoop, eds., CWI Syllabus, Netherlands, 1, Centrum voor Wiskunde en Informatica, pp. 65–84. (2008) http://eprints.ewi.utwente.nl/14950
Banasiak, J.: On \(L_2\)-solvability of mixed boundary value problems for elliptic equations in plane nonsmooth domains. J. Differ. Equ. 97, 99–111 (1992)
Banasiak, J., Roach, G.F.: On mixed boundary value problems of Dirichlet oblique-derivative type in plane domains with piecewise differentiable boundary. J. Differ. Equ. 79, 111–131 (1989)
Banasiak, J., Roach, G.F.: On corner singularities of solutions to mixed boundary-value problems for second-order elliptic and parabolic equations. Proc. R. Soc. Lond. Ser. A 433, 209–217 (1991)
Bernstein, D. H., Guidotti, P.: Modeling and analysis of hysteresis phenomena in electrostatic zipper actuators, in Proceedings of Modeling and Simulation of Microsystems 2001, Hilton Head Island, SC, pp. 306–309. (2001)
Boggio, T.: Sulle funzioni di Green d’ordine \(m\). Rend. Circ. Mat. Palermo 20, 97–135 (1905)
Bucur, D., Buttazzo, G.: Variational methods in shape optimization problems. Progress in Nonlinear Differential Equations and their Applications, vol. 65. Birkhäuser Boston Inc, Boston, MA (2005)
Dal Maso, G.: An introduction to \(\Gamma \)-convergence. Progress in Nonlinear Differential Equations and their Applications, vol. 8. Birkhäuser Boston Inc, Boston, MA (1993)
Esposito, P., Ghoussoub, N., Guo, Y.: Mathematical analysis of partial differential equations modeling electrostatic MEMS. Courant Lecture Notes in Mathematics, Courant Institute of Mathematical Sciences, vol. 20. New York; American Mathematical Society, Providence, RI (2010)
Fargas Marquès, A., Costa Castelló, R., Shkel, A. M.: Modelling the electrostatic actuation of MEMS: state of the art 2005. Technical Report, Universitat Politècnica de Catalunya (2005)
Grisvard, P.: Elliptic problems in nonsmooth domains, vol. 69 of Classics in Applied Mathematics, Society for Industrial and Applied Mathematics (SIAM), Philadelphia, PA: Reprint of the 1985 original [MR0775683]. With a foreword by Susanne C, Brenner (2011)
Grunau, H.-C.: Positivity, change of sign and buckling eigenvalues in a one-dimensional fourth order model problem. Adv. Differ. Equ. 7, 177–196 (2002)
Henrot, A., Pierre, M.: Shape variation and optimization, vol. 28 of EMS Tracts in Mathematics, European Mathematical Society (EMS), Zürich, (2018)
König, H.: Ein einfacher Beweis des Integralsatzes von Gauss, Jber. Deutsch. Math.-Verein., 66, pp. 119–138 (1963/1964)
Laurençot, Ph., Nik, K., Walker, Ch.: Reinforced limit of a MEMS model with heterogeneous dielectric properties, Appl. Math. Optim. 84, 1373–1393 (2021)
Laurençot, Ph., Walker, Ch.: Sign-preserving property for some fourth-order elliptic operators in one dimension or in radial symmetry. J. Anal. Math. 127, 69–89 (2015)
Laurençot, Ph., Walker, Ch.: A constrained model for MEMS with varying dielectric properties. J. Elliptic Parabol. Equ. 3, 15–51 (2017)
Laurençot, Ph., Walker, Ch.: Some singular equations modeling MEMS. Bull. Am. Math. Soc. (N.S.) 54, 437–479 (2017)
Laurençot, Ph., Walker, Ch.: Heterogeneous dielectric properties in models for microelectromechanical systems. SIAM J. Appl. Math. 78, 504–530 (2018)
Laurençot, Ph., Walker, Ch.: Shape derivative of the Dirichlet energy for a transmission problem. Arch. Ration. Mech. Anal. 237, 447–496 (2020)
Laurençot, Ph., Walker, Ch.: Variational solutions to an evolution model for MEMS with heterogeneous dielectric properties. Discrete Contin. Dyn. Syst. Ser. S 14, 677–694 (2021)
Leoni, G.: A first course in Sobolev spaces. Graduate Studies in Mathematics, vol. 181, 2nd edn. American Mathematical Society, Providence, RI (2017)
Lindsay, A.E., Lega, J., Glasner, K.G.: Regularized model of post-touchdown configurations in electrostatic MEMS: equilibrium analysis. Phys. D 280–281, 95–108 (2014)
Lindsay, A.E., Lega, J., Glasner, K.G.: Regularized model of post-touchdown configurations in electrostatic MEMS: interface dynamics. IMA J. Appl. Math. 80, 1635–1663 (2015)
Marschall, J.: The trace of Sobolev-Slobodeckij spaces on Lipschitz domains. Manuscripta Math. 58, 47–65 (1987)
Maz’ya, V.G., Netrusov, Y.V., Poborchiĭ, S.V.: Boundary values of functions from Sobolev spaces in some non-Lipschitzian domains. St. Petersburg Math. J. 11, 107–128 (2000)
Nečas, J.: Les méthodes directes en théorie des équations elliptiques, Masson et Cie. Éditeurs. Paris; Academia, Éditeurs, Prague (1967)
Owen, M.P.: Asymptotic first eigenvalue estimates for the biharmonic operator on a rectangle. J. Differ. Equ. 136, 166–190 (1997)
Pelesko, J. A.: Mathematical modeling of electrostatic MEMS with tailored dielectric properties, SIAM J. Appl. Math., 62: 888–908 (2001/02) (electronic)
Pelesko, J.A., Bernstein, D.H.: Modeling MEMS and NEMS. Chapman and Hall/CRC, Boca Raton (2003)
Sokołowski, J., Zolésio, J.-P.: Introduction to shape optimization. Springer Series in Computational Mathematics, Shape Sensitivity Analysis, vol. 16. Springer-Verlag, Berlin (1992)
Šverák, V.: On optimal shape design. J. Math. Pures Appl. 72, 537–551 (1993)
Wloka, J.: Partielle Differentialgleichungen, B. G. Teubner, Stuttgart, (1982). Sobolevräume und Randwertaufgaben. [Sobolev spaces and boundary value problems], Mathematische Leitfäden. [Mathematical Textbooks]
Younis, M.I.: MEMS. Linear and nonlinear statics and dynamics. Springer, New York, Dordrecht, Heidelberg, London (2011)
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by J. M. Ball.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Partially supported by the CNRS Projet International de Coopération Scientifique PICS07710.
Appendices
Appendix A: A technical lemma
Lemma A.1
Let I and J be two bounded intervals in \({\mathbb {R}}\), and let U be a bounded open subset of \(I \times J\). Consider \(\vartheta \in H^1(U)\) and functions \(v\in C(\bar{I})\), \(w\in C(\bar{I})\), and \(\rho \in C(\bar{I})\), \(\rho \ge 0\), such that
-
(a)
\(x \mapsto \vartheta (x,v(x))\) and \(x \mapsto \vartheta (x,w(x))\) are well-defined and belong to \(L_2(I,\rho \, \mathrm {d}x)\);
-
(b)
\(\{ (x,z) \in I \times J : \min \{v(x),w(x)\}< z< \max \{v(x),w(x)\}\} \subset \bar{U}\).
Then
Proof
Owing to (b) we have, for a.a. \(x \in I\),
Integrating with respect to \(x\in I\) after multiplication by \(\rho (x)\) and using Hölder’s inequality give
and the proof is complete. \(\square \)
Appendix B: Proof of Lemma 3.11
The proof of Lemma 3.11 relies on the following result, which can be seen as an extension of [12, Lemma 4.3.1.3] to include Robin boundary conditions.
Lemma B.1
Let \(I:=(a,b)\) and set \({\mathcal {R}}_I = I\times (0,1)\). Consider \(\varphi \in H^2({\mathcal {R}}_I)\) and \(\mu \in C^2(\bar{I})\) such that
Then
Proof
We put \(\xi (x,\eta ) := e^{-\eta \mu (x)} \varphi (x,\eta )\) and \(\rho (x,\eta ) := e^{\eta \mu (x)}\) for \((x,\eta )\in {\mathcal {R}}_I\). Owing to the regularity of \(\varphi \) and \(\mu \), the function \(\xi \) belongs to \(H^2({\mathcal {R}}_I)\) and, for \((x,\eta )\in {\mathcal {R}}_I\),
Consequently, the functions F and G, defined for \((x,\eta )\in {\mathcal {R}}_I\) by
satisfy
since, by (B.1),
We then infer from [12, Lemma 4.3.1.3] that
that is,
where
First, integrating by parts and using the boundary values (B.1) of \(\varphi \) give
and
Owing to (B.2) we conclude that \(I_2=0\). Finally, we deduce from (B.1) and (B.2) after integrating by parts that
Collecting (B.3) and the formulas for \(I_j\), \(1\le j\le 3\), completes the proof. \(\square \)
Proof of Lemma 3.11
For \((x,\eta )\in {\mathcal {R}}_I\), we define
or, equivalently,
Since \(\zeta _v\in H^2({\mathcal {O}}_I(v))\) by Lemma 3.10 and \(v\in H^2(I)\), the function \(\Phi \) belongs to \(H^2({\mathcal {R}}_I)\) and we infer from (3.18b) and (3.18c) that
Next,
where
Since
we further obtain
where
We first infer from (B.5) and Lemma B.1 (with \(\varphi =\Phi /\sqrt{H+v}\) and \(\mu =\sigma (H+v)\)) that
Next, we integrate by parts and use the boundary values (B.5) of \(\Phi \) to obtain
and
Next,
with
Integrating by parts and using (B.5) give
Consequently,
where
Now, since \(H^2({\mathcal {R}}_I)\) is continuously embedded in \(C(\overline{{\mathcal {R}}_I})\) by [12, Theorem 1.4.5.2], we infer from (B.5) that
Using this property along with an integration by parts, we obtain
so that \(J_4\) reduces to
We then infer from (B.4), (B.7), and (B.8) that
Combining (B.6) and the above identity completes the proof. \(\square \)
Appendix C: Some functional inequalities
Let \(I=(a,b)\subset D\) be an open interval and consider \(v\in W_\infty ^3(I)\) such that \(\min _{[a,b]} v >-H\). Let \(M>0\) be such that
We derive in this section functional inequalities for functions in the subspace \(H^1_{WS}({\mathcal {O}}_I(v))\) of \(H^1({\mathcal {O}}_I(v))\) introduced in (3.31). Recall that \(P\in H^1_{WS}({\mathcal {O}}_I(v))\) if and only if \(P\in H^1({\mathcal {O}}_I(v))\) satisfies
We begin with Poincaré and Sobolev inequalities and pay special attention to the dependence of the constants on v.
Lemma C.1
Let \(P\in H^1_{WS}({\mathcal {O}}_I(v))\). Then
where M is given by (C.1).
Proof
For \((x,\eta )\in {\mathcal {R}}_I=I\times (0,1)\), we define
and observe that the regularity of v and P implies that \(Q\in H^1({\mathcal {R}}_I)\). In addition, we deduce from (C.2) that
On the one hand, it follows from (C.4b) that, for a.a. \((x,\eta )\in {\mathcal {R}}_I\),
On the other hand, by (C.4a), we obtain, for a.a. \((x,\eta )\in {\mathcal {R}}_I\),
We then infer from (C.3), (C.5), and (C.6) that
Now,
and
It further follows from (C.2a) that, for a.a. \((x,z)\in {\mathcal {O}}_I(v)\),
Hence,
Since \(0\le H+z \le H+v(x)\) for \((x,z)\in {\mathcal {O}}_I(v)\), we deduce from (C.1), (C.9), and (C.10) that
Collecting (C.7), (C.8), and (C.11) completes the proof. \(\square \)
Since \({\mathcal {O}}_I(v)\) is a two-dimensional domain, a classical consequence of Lemma C.1 is the continuous embedding of \(H_{WS}^1({\mathcal {O}}_I(v))\) in \(L_r({\mathcal {O}}_I(v))\) for \(r\in [1,\infty )\). We stress here once more that our main concern is the precise dependence of the embedding constant on v.
Lemma C.2
Let \(P\in H^1_{WS}({\mathcal {O}}_I(v))\) and \(r\in [2,\infty )\). Then
where M is given by (C.1).
Proof
Step 1. Assume first that \(r\ge 4\). For \(n\ge 1\), we define the truncation \({\mathcal {T}}_n\) by \({\mathcal {T}}_n(s):= s\) for \(s\in [-n,n]\) and \({\mathcal {T}}_n(s) := n\, \mathrm {sign}(s)\) for \(s\in (-\infty ,-n)\cup (n,\infty )\). Since \({\mathcal {T}}_n\) is a Lipschitz continuous function on \({\mathbb {R}}\) with \(|{\mathcal {T}}_n'|\le 1\) and vanishes at zero, the function \({\mathcal {T}}_n(P)^{r/2}\) also belongs to \(H^1_{WS}({\mathcal {O}}_I(v))\). We then infer from Lemma C.1, the bound \(|{\mathcal {T}}_n'|\le 1\), and Hölder’s inequality that
Using again Hölder’s inequality, as well as the property \(|{\mathcal {T}}_n(s)|\le |s|\) for \(s\in {\mathbb {R}}\), gives
since \(r\ge 4\). Combining the above two inequalities leads us to
Since the right-hand side of the above inequality does not depend on \(n\ge 1\), we may take the limit \(n\rightarrow \infty \) and deduce from Fatou’s lemma that \(P\in L_r({\mathcal {O}}_I(v))\) and satisfies the stated bound for \(r\ge 4\).
Step 2. Consider now \(r\in [2,4]\). By Hölder’s inequality and Lemma C.2 for \(r=4\),
and we complete the proof by noticing that \(4\le 2r\). \(\square \)
In the same vein, we derive an estimate for the trace of \(P\in H_{WS}^1({\mathcal {O}}_I(v))\) on the graph \({\mathfrak {G}}_I(v)\) of v, the trace being here well-defined since the assumption \(\min _{[a,b]} v >-H\) guarantees that \({\mathcal {O}}_I(v)\) is a Lipschitz domain.
Lemma C.3
Let \(P\in H^1_{WS}({\mathcal {O}}_I(v))\) and \(r\in [2,\infty )\). Then
where M is given by (C.1).
Proof
By (C.2a) we have, for a.a. \(x\in I\),
Integrating over I and using Hölder’s inequality lead us to
Since \(2(r-1)\ge 2\) as \(r\ge 2\), we deduce from Lemma C.2 and the above inequality that
from which Lemma C.3 follows, after using that \(r \left( 4(r-1) \sqrt{M} \right) ^{r-2} \le \left( 4r\sqrt{M} \right) ^r\). \(\square \)
Appendix D: A uniform bound for an auxiliary stationary problem
Proposition D.1
Consider \(G_0> 0\), \(\beta >0\), and \(\tau \ge 0\). Let \(I=(a,b)\subset (-L,L)\) be an open interval and let \(S_{I}\) be the unique solution to the boundary value problem
supplemented with inhomogeneous Dirichlet boundary conditions
or clamped boundary conditions
There is \(\kappa _0>0\) depending only on \(G_0\), \(\beta \), L, H, and \(\tau \) such that
Proof
Case 1: \(-L<a<b<L\). We set \(P(y) := S_{I}(a+(b-a)y)+H\) for \(y\in [0,1]\) and deduce from (D.1) and (D.2) that P solves the boundary-value problem
We first infer from (D.6), the positivity of \(G_0\), and a version of Boggio’s comparison principle [7, 13, 17, 29] that \(P>0\) in (0, 1). We next multiply (D.6) by P and integrate over (0, 1). After integrating by parts and using the boundary conditions, we obtain
Since
by (D.6), we infer from these observations that
Consequently, \(0\le P \le 16L^4 G_0/ \beta \) in [0, 1], hence \(-H \le S_{I} \le 16 L^4 G_0/ \beta - H\) in [a, b].
Case 2: \(-L=a<b<L\). Let \(Q\in {\mathbb {R}}_4[X]\) be such that \(Q(0)=Q'(0) = Q(1)+H = Q'(1)= 0\); that is, \(Q(y) = y^2(y^2 +2(H-1)y +1- 3H)\). We set \(P(y) := S_{I}(-L+(b+L)y)-Q(y)\) for \(y\in [0,1]\) and deduce from (D.1) and (D.3) that P solves the boundary value problem
Arguing as in Case 1, we are led to
since \(Q''''=24\) and
Consequently,
Case 3: \(-L<a<b=L\). We set \(P(y) := S_{I}(a+y(L-a))-Q(1-y)\) for \(y\in [0,1]\) and proceed as in the previous case to derive the same bound for \(\Vert S_{I}\Vert _{L_\infty (I)}\).
Case 4: \(-L=a<b=L\). We set \(P(y) := S_{I}(-L+2Ly)\) for \(y\in [0,1]\) and deduce from (D.1) and (D.5) that P solves the boundary value problem
We then argue as in Case 1 to conclude that \(0\le S_{I} \le 16L^4 G_0/\beta \) in \([-L,L]\). \(\square \)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Laurençot, P., Nik, K. & Walker, C. Energy minimizers for an asymptotic MEMS model with heterogeneous dielectric properties. Calc. Var. 61, 16 (2022). https://doi.org/10.1007/s00526-021-02114-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00526-021-02114-2