
Abstract
The central object of this article is (a special version of) the Helfrich functional which is the sum of the Willmore functional and the area functional times a weight factor \(\varepsilon \ge 0\). We collect several results concerning the existence of solutions to a Dirichlet boundary value problem for Helfrich surfaces of revolution and cover some specific regimes of boundary conditions and weight factors \(\varepsilon \ge 0\). These results are obtained with the help of different techniques like an energy method, gluing techniques and the use of the implicit function theorem close to Helfrich cylinders. In particular, concerning the regime of boundary values, where a catenoid exists as a global minimiser of the area functional, existence of minimisers of the Helfrich functional is established for all weight factors \(\varepsilon \ge 0\). For the singular limit of weight factors \( \varepsilon \nearrow \infty \) they converge uniformly to the catenoid which minimises the surface area in the class of surfaces of revolution.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Helfrich energy for a sufficiently smooth (two dimensional) surface \( S \subset {\mathbb {R}} ^3 \) (with or without boundary), introduced by Helfrich in [27] and Canham in [8], is defined by
Here the integration is done with respect to the usual 2-dimensional area measure \( \mathop {}\!\mathrm {d}S \), H is the mean curvature of S, i. e. the mean value of the principal curvatures, K is the Gaussian curvature, \( \gamma \in {\mathbb {R}} \) is a constant bending rigidity, \( \varepsilon \ge 0\) the weight factor of the area functional and \( H_0 \in {\mathbb {R}} \) a given spontaneous curvature. For simplicity we will always assume \( H_0=0 \) so that the first term in the above energy reduces to the well–known Willmore functional \(\int _S H^2 \, \mathop {}\!\mathrm {d}S\). We expect nontrivial \(H_0\not =0\) to result in completely different geometric phenomena; we think that our methods cannot directly be extended to this case. For the investigation of closed surfaces in the case \(H_0\not =0\) one may see e.g. [5, 10]. We also choose \( \gamma =0 \) since \( \int _ {S}K \, \mathop {}\!\mathrm {d}S \) in the second term will only contribute to boundary terms by the Gauss-Bonnet theorem, which are constant thanks to the given boundary conditions. The Euler-Lagrange equation to the resulting Helfrich energy is known as the Helfrich equation and is given by
where \( \Delta _S \) denotes the Laplace-Beltrami operator on S.
There are several applications of the Helfrich energy in e. g. biology in modelling red blood cells or lipid bilayers (see e. g. [8, 27, 34, 36]) and in modelling thin elastic plates (see e. g. [24]). As noted in [11, 34], the Willmore functional was already considered in the early 19th century (see [24, 37]) and has been periodically reintroduced according to the availability of more powerful mathematical tools e.g. in the early 1920s (see [45]) and most successfully by Willmore (see [46]) in the 1960s. So far, mathematical research has mainly focused on closed (i.e. compact without boundary) surfaces minimising the Willmore functional, see e. g. [2, 32, 44] and references therein. Some results on closed surfaces minimising the Helfrich energy under fixed area and enclosed volume for the axisymmetric case can be found in [10]. In [9] this was generalised to a multiphase Helfrich energy, while recently in [6] the same problem was studied in the setting of curvature varifolds, thereby dropping the symmetry assumptions.
In contrast to closed surfaces we are here interested in a Dirichlet boundary value problem for minimising the Helfrich energy. Some existence results on the Dirichlet problem for the Willmore functional can be found e. g. in [42] for a class of branched immersions in \({\mathbb {R}}^3\cup \{\infty \}\). The Douglas (or Navier) boundary value problem was studied in [35, 38]. In the class of surfaces of revolution existence results for the Willmore functional were obtained in [12, 14, 20]; see also references therein. In [16] existence of minimisers of a relaxed Willmore functional in the class of graphs over two-dimensional domains was proved. For the Helfrich functional an existence result for branched immersions in \({\mathbb {R}}^3\) was found in [19]. This is somehow related to [11], where an area constraint was imposed in order to minimise the Willmore functional.
In this paper we focus on surfaces of revolution S
for some sufficiently smooth profile curve \( u :[-1,1] \rightarrow (0, \infty ) \). We then consider the Dirichlet boundary value problem for Helfrich surfaces of revolution
for a given boundary value \( \alpha >0 \) and for profile curves u that are even, i. e. \( u(x) = u(-x) \). The precise setting and a derivation of (1) will be given in Sect. 2. First existence results for (1) have been obtained in [43] and [18]. The goal of this paper is to extend these results in several directions including a description of the qualitative behaviour of solutions when possible. Depending on the two parameters \( \alpha \) and \( \varepsilon \), Fig. 1 gives an overview of domains on which existence of solutions to the Helfrich problem (1) is guaranteed. Let us describe these domains in more detail and relate them to the various sections of this paper.

A sketch of domains for existence of solutions to the Dirichlet problem (1) depending on \( (\alpha ,\varepsilon ) \): The domains  and
and  show existence of Helfrich minimisers obtained in Theorem 2 and [18, Satz 5.3.3 and 5.3.4]. The
show existence of Helfrich minimisers obtained in Theorem 2 and [18, Satz 5.3.3 and 5.3.4]. The  curve where \( \varepsilon = \varepsilon _ \alpha = \frac{1}{4 \alpha ^2} \) displays the Helfrich cylinders (see [43, Lemma 4.1]). The
curve where \( \varepsilon = \varepsilon _ \alpha = \frac{1}{4 \alpha ^2} \) displays the Helfrich cylinders (see [43, Lemma 4.1]). The  domain sketches existence of solutions obtained by perturbing the Helfrich cylinders (see Theorem 3). The
domain sketches existence of solutions obtained by perturbing the Helfrich cylinders (see Theorem 3). The  domain is obtained with the help of gluing techniques (see Theorem 7) and may be compared to the
domain is obtained with the help of gluing techniques (see Theorem 7) and may be compared to the  domain implicitly found in [43, Theorem 4.14] (colour figure online)
domain implicitly found in [43, Theorem 4.14] (colour figure online)
As a starting point we consider in Sect. 3 the Helfrich boundary value problem as a regular perturbation of the Willmore boundary value problem for small \(\varepsilon \). Note however that a direct application of the techniques developed in [12] for the Willmore functional is not possible because they are heavily based on its conformal invariance and on explicitly known Willmore minimisers. Nevertheless, by applying the direct method and utilising an energy gap of the Willmore energy to \( 4 \pi \) we find in Theorem 2 solutions of (1) for any \(\alpha >0\) and \(\varepsilon \ge 0\) not too large, see the blue regions in Fig. 1. In this case we solely give a quantitative existence proof with no qualitative description of the minimisers.
In order to develop some intuition for what happens when \(\varepsilon \) increases we then concentrate in Sect. 4 on the local picture around a Helfrich cylinder, i.e. \( u(x) \equiv \alpha \), which is an explicit solution and the unique Helfrich minimiser in the case \( \varepsilon = \varepsilon _ \alpha := \frac{1}{4 \alpha ^2} \) (see [43, Lemma 4.1]; red curve in Fig. 1). Linearising (1) for fixed \( \alpha \) at the corresponding Helfrich cylinder, the implicit function theorem yields the existence of a smooth family \((u_ \varepsilon )_{\varepsilon \approx \varepsilon _ \alpha }\) of solutions of (1), see Theorem 3; orange domain in Fig. 1. As a first step in order to understand whether and how this local branch is part of a possibly existing family of solutions \((u_ \varepsilon )_{\varepsilon \ge 0}\) we consider the rate of change function \( rc _\alpha := \frac{\partial u_ \varepsilon }{\partial \varepsilon } |_ {\varepsilon = \varepsilon _ \alpha } \), for which we derive an explicit formula. A careful analysis of the resulting expression shows that \( rc _\alpha \) is negative, see Theorem 4, which gives rise to the (open) conjecture that the family \((u_ \varepsilon )_{\varepsilon \in [0,\varepsilon _ \alpha ]}\) exists and is decreasing with respect to \(\varepsilon \). Furthermore, we find that the shape of \( rc _\alpha \) strongly depends on the boundary value \( \alpha \). More precisely, there exists a critical value \(\alpha _ \text {crit} \approx 0.18008\) such that for \( \alpha > \alpha _ \text {crit}\) the function \( rc _\alpha \) is strictly increasing on [0, 1] (see Theorem 5), while for \( \alpha < \alpha _ \text {crit} \) and \( \alpha \searrow 0 \) an increasing number of oscillations around a negative value show up. This interesting phenomenon of “overshoot” and subsequent oscillations around an expected “attracting state” has often been observed in numerical experiments and to our knowledge this is the first time where an analytical proof is given. It indicates that for small \(\alpha >0\), understanding existence, qualitative properties and asymptotic behaviour for the full range of \(\varepsilon \in [0,\infty )\) remains an interesting and challenging open problem.
Next, in Sect. 5 we consider the case of larger values of \(\varepsilon \). This means that the area functional as part of the Helfrich energy is given a bigger weight suggesting that minimisers of the area functional in the class of surfaces of revolution might be useful when minimising the Helfrich funtional in this case. It is well–known that there exists a threshold \( \alpha _m \approx 1.805 \) such that for \( \alpha > \alpha _m \) the minimiser is given by a catenoid while for \( \alpha < \alpha _m \) it is a so-called Goldschmidt solution. Using this observation in the case \(\alpha \ge \alpha _m\) we are able to decrease the energy of minimising sequences for the Helfrich functional by gluing in suitable catenoids leading to the existence of minimisers, see Theorem 7 and the purple region in Fig. 1. At the same time this process gives some qualitative information about these minimisers. In addition, we prove in Corollary 3 that the sequence of minimisers converges to the area-minimising catenoid in the singular limit \( \varepsilon \nearrow \infty \). So far, there is only numerical evidence that for \(0< \alpha < \alpha _m\) minimisers may exist for any \(\varepsilon \ge 0\) and converge in some singular sense to the Goldschmidt minimal surface as \( \varepsilon \nearrow \infty \).
In Sect. 6 we finally summarise our results and describe some open problems. At the end we add three appendices. Appendix A provides a proof for the “well-known” fact, which catenoid minimises the area functional. Appendix B proves a divergence form of the Helfrich equation and Appendix C collects the basic estimates to prove the theorems of Sect. 4.
2 Geometric background for surfaces of revolution
For a sufficiently smooth (two dimensional) surface \(S \subset {\mathbb {R}}^3\) (with or without boundary) we consider the Helfrich functional (see e.g. [27, 34])
Here \(\mathop {}\!\mathrm {d}S\) denotes integration with respect to the surface area measure, while
are the mean curvature and the Gauss curvature of S respectively. Furthermore, \(\gamma \in {\mathbb {R}}\) as well as \(\varepsilon \ge 0\) are given constants. In what follows we consider surfaces of revolution S
which arise when the sufficiently smooth profile curve \( u:[-1,1]\rightarrow (0,\infty ) \) is rotated around the x-axis. Expressing H and K in terms of u yields
Since \(\mathop {}\!\mathrm {d}S = u(x) \sqrt{1+u'(x)^2}\, \mathop {}\!\mathrm {d}x\, \mathop {}\!\mathrm {d}\theta \) we have for the surface area
while the Willmore functional is given by
In what follows we shall consider for \(\alpha >0\) the following class of admissible functions:
Note that for \(u \in N_\alpha \)
so that in our setting the Helfrich functional \({\mathscr {H}} = {\mathscr {H}}_\varepsilon : N_\alpha \rightarrow {\mathbb {R}}\) takes the form
Using the fact that \(\frac{u''}{(1+(u')^2)^{3/2}}= \frac{\mathop {}\!\mathrm {d}}{\mathop {}\!\mathrm {d}x} \bigl ( \frac{u'}{\sqrt{1+(u')^2}} \bigr )\) we find that
In particular we have for \(u \in N_\alpha \) that
Let us next consider the Euler–Lagrange equation for \({\mathscr {H}}_\varepsilon \) and fix \(u \in N_\alpha \cap C^4([-1,1])\). Then we calculate for the first variation of \({\mathscr {A}}\) at u in direction \(\varphi \in H^2_0(-1,1)\)
while [15, Lemma A.1] yields
Combining (9) and (10) we see that if \(u \in N_\alpha \cap C^4([-1,1])\) is a critical point of the energy \({\mathscr {H}}_\varepsilon \) then it is a solution of Helfrich equation
Using the calculations in [12, Section 2.1] in order to express the left hand side in terms of u we obtain that u is a solution of the following Dirichlet problem
Note that (12) is a fourth order quasilinear equation, which is elliptic, but not uniformly elliptic. Let us briefly refer to three particular solutions of (12) in the class of symmetric, positive profile curves:
-
i.
catenoids: \(u(x) = c \cosh (\frac{x}{c}) \, (c>0)\) for every \(\varepsilon \ge 0\).
-
ii.
spheres: \(u(x) = \sqrt{c^2 - x^2} \, (c>1)\) in the case \(\varepsilon =0\);
-
iii.
cylinders: \(u(x) = c>0\) in the case \(\varepsilon = \frac{1}{4c^2}\).
Catenoids and spheres have been successfully employed in the construction of symmetric Willmore surfaces (see e.g. [12, 14]) as well as in the analysis of their asymptotic shape for small values of \(\alpha \), see [26].
3 Existence of minimisers via energy bounds
Lemma 1
Let \(u \in H^2(-1,1)\) be even.
-
a)
If \(u'(\pm 1)=0\), then \({\mathscr {A}}(u) \, {\mathscr {W}}(u) \ge 4 \pi ^2\).
-
b)
If \({\mathscr {W}}(u) < 4 \pi \) and \(u'(\pm 1)=0\), then
$$\begin{aligned} \max _{x \in [-1,1]} | u'(x) | \le \frac{{\mathscr {W}}(u)}{\sqrt{16 \pi ^2 - {\mathscr {W}}(u)^2}}. \end{aligned}$$ -
c)
If \(| u'(x) | \le M, u( \pm 1)= \alpha \), then
$$\begin{aligned} \forall x \in [-1,1]: \qquad \alpha \exp \bigl ( -\frac{1}{\pi } M \sqrt{1+M^2} \, {\mathscr {W}}(u) \bigr ) \le u(x) \le \alpha +M. \end{aligned}$$
Proof
a) Using Hölder’s inequality and (7) we have
b) Choose \(x_0 \in (0,1)\) with \(| u'(x_0) |= \max _{x \in [-1,1]} | u'(x) |\) and let \([a,b]=[x_0,1]\) if \(u'(x_0) \ge 0\) and \([a,b]=[0,x_0]\) if \(u'(x_0)<0\). Since \(u'(0)=u'(1)=0\) we calculate with the help of (7)
and the required bound follows by solving for \(|u'(x_0)|\).
c) For \(x \in [0,1]\) we have
which implies the lower bound on u. A similar idea was used in [14, Lemma 4.9]. The upper bound is immediate. \(\square \)
Corollary 1
Suppose that \(u \in H^2(-1,1)\) is even with \(u'(\pm 1)=0\). Then \({\mathscr {H}}_\varepsilon (u) \ge 4\pi \sqrt{\varepsilon }\) and
Proof
Lemma 1 a) implies that
and hence
which yields (14). \(\square \)
Theorem 1
Let \(\alpha >0\) and \(0 \le \varepsilon \le 4\). If \({\mathscr {H}}_\varepsilon (v)< \pi (4+\varepsilon )\) for some \(v \in N_\alpha \), then \({\mathscr {H}}_\varepsilon \) attains a minimum \(u \in N_\alpha \), which belongs to \(C^{\infty }([-1,1])\).
Proof
Let \((u_k)_{k \in {\mathbb {N}}} \subset N_\alpha \) be a minimising sequence such that \({\mathscr {H}}_\varepsilon (u_k) \searrow \inf _{w \in N_\alpha } {\mathscr {H}}_\varepsilon (w) \le {\mathscr {H}}_\varepsilon (v)\). Corollary 1 implies that
since \({\mathscr {H}}_\varepsilon (v)< \pi (4+\varepsilon )\) and \(\varepsilon \le 4\). Thus there exist \(\delta >0, k_0 \in {\mathbb {N}}\) such that \({\mathscr {W}}(u_k) \le 4 \pi - \delta \) for all \(k \ge k_0\). Lemma 1 then implies that \((u_k)_{k \in {\mathbb {N}}}\) is bounded in \(C^1([-1,1])\) and that \(0<\varrho \le u_k(x)\le \frac{1}{\varrho }\) for a suitable \(\varrho >0\). Then one sees from (7) that a bound for \({{\mathscr {W}}} (u_k)\) also yields an \(L^2\)-bound for \(\left( u_k''\right) _{k\in {\mathbb {N}}}\). Arguing as in the proof of [12, Theorem 3.9] we obtain a subsequence, again denoted by \((u_k)_{k \in {\mathbb {N}}}\), and \(u \in N_{\alpha }\) such that
and it is easily seen that u is a minimiser of \({\mathscr {H}}_\varepsilon \). The fact that u belongs to \(C^{\infty }([-1,1])\) can be shown by a straightforward adaptation of the corresponding argument in the proof of [12, Theorem 3.9]. \(\square \)
In order to apply Theorem 1 we look for suitable functions \(v \in N_\alpha \) such that \({\mathscr {H}}_\varepsilon (v) < \pi (4+\varepsilon )\). For the simple choice \(v \equiv \alpha \) we find that
As a second useful comparison function we define (see [23, Lemma 8.6])
where \(r=\sqrt{x_0^2+ \alpha ^2 \cosh \bigl ( \frac{x_0-1}{\alpha } \bigr )^2}\) and \(x_0 \in (\frac{1}{2},1)\) is chosen in such a way that
This condition means that the normal to the \(\cosh \)-function through the point \((x_0,v(x_0))\) intersects the x-axis in the origin. One may observe that
is strictly increasing on [0, 1], strictly negative for \(x=\frac{1}{2}\) and strictly positive for \(x=1\). The choice of \(x_0\) and r ensures that \(v \in N_\alpha \) and that \(r \le \sqrt{1+\alpha ^2}\). Since \(H=0\) for \(x_0 \le |x| \le 1\), we obtain with the help of (7) that
since \(\frac{1}{2}< x_0< 1\) and
From the above calculations we infer the following existence result:
Theorem 2
The functional \({\mathscr {H}}_\varepsilon \) attains a minimum on \(N_\alpha \), if one of the following conditions is satisfied:
-
i)
\(\alpha >\frac{1}{4}\) and \(0 \le \varepsilon < \frac{1}{\alpha }\);
-
ii)
\(\alpha >0\) and \(\displaystyle 0 \le \varepsilon \le \frac{1 - \tanh \bigl ( \frac{1}{2 \alpha } \bigr )}{\sqrt{1+\alpha ^2} + \frac{\alpha }{4}+ \frac{\alpha ^2}{4} \sinh \bigl ( \frac{1}{\alpha } \bigr ) - \frac{1}{4}}\).
Proof
The result follows from (15), (16) and Theorem 1. \(\square \)
4 Perturbation of Helfrich cylinders
Throughout this section we fix for a given \( \alpha >0 \)
as the parameter where the Helfrich cylinder
is the unique minimiser of \({{\mathscr {H}}}_{{{\varepsilon }_\alpha }}\) (see [43, Lemma 4.1]). Let us define
Recalling (12) and taking into account that
we calculate
Theorem 3
For every \( \alpha > 0 \) there exists \( \delta >0 \) such that for all \( \varepsilon \in ( \varepsilon _ \alpha - \delta , \varepsilon _ \alpha + \delta ) \) the boundary value problem (12), (13) has a smooth family of solutions \( u_ \varepsilon \in N_ \alpha \cap C^ \infty ([-1,1]) \).
Proof
We apply the implicit function theorem as it can be found in [17, Theorem 15.1]. Let \( X = {\mathbb {R}} \), \( U = (0, \infty ) \subset X\), \( Y = C^4( [-1,1]) \), \( V = C^4([-1,1],(0, \infty )) \subset Y\), \( Z = C^0([-1,1]) \times {\mathbb {R}} ^4 \). Moreover consider the function \( \Phi :U \times V \rightarrow Z \) defined by
In view of (17) we obtain for \( L :Y \rightarrow Z \) with \(\displaystyle L(\varphi ):= \langle \frac{\partial \Phi }{\partial u}(\varepsilon _ \alpha ,u_{{{\varepsilon }_\alpha }}), \varphi \rangle \) that
We claim that L is injective. To see this, consider the boundary value problem
The roots of the characteristic equation for the differential equation in (18) are given by \( \pm \frac{1+i}{\alpha \sqrt{ 2 } } \) and \( \pm \frac{1-i}{\alpha \sqrt{ 2 } } \) so that the functions
form a fundamental system. Hence there exist constants \( b _1, \dots ,b _4 \in {\mathbb {R}} \) such that \(\varphi (x) \,=\, \sum _ {j=1} ^4 b _j \, \varphi _j(x), \, x \in [-1,1]\). The four boundary conditions \(\varphi (\pm 1)= \varphi '(\pm 1)=0\) translate into the linear system \(M b =0\) with \(b=(b_1,\ldots ,b_4)\) and \(m_{1j}=\varphi _j(1), m_{2j}=\varphi _j(-1), m_{3j}=\frac{1}{\beta } \varphi _j'(1), m_{4j}=\frac{1}{\beta } \varphi _j'(-1), j=1,\ldots ,4\), where we have abbreviated \( \beta = \frac{1}{\alpha \sqrt{ 2 } } > 0 \). Using the above expressions for \(\varphi _j\) we find that
and a calculation shows that
Hence \( b_1 = \dots = b_4 = 0 \), which yields \( \varphi \equiv 0 \), so that L is injective. Furthermore, since L allows for an elliptic theory, i. e. L is Fredholm of index 0, we infer that L is invertible with bounded inverse. Hence we can apply the implicit function theorem to obtain solutions \( u_ \varepsilon \in N_ \alpha \cap C^4([-1,1]) \) for \( \varepsilon \) close to \( \varepsilon _0 \). By arguing again as in the proof of Theorem 1 we also have \( u_ \varepsilon \in C^ \infty ([-1,1]) \). \(\square \)
To study the behaviour of \(u_\varepsilon \) for \( \varepsilon \) close to \( \varepsilon _ \alpha \) we introduce
Since \(\displaystyle \frac{\mathop {}\!\mathrm {d}}{\mathop {}\!\mathrm {d}\varepsilon } F(\varepsilon ,u_\varepsilon )_{| \varepsilon = \varepsilon _\alpha }=0\) we find with the help of (17) that
giving rise to the following boundary value problem for \( rc _\alpha \):
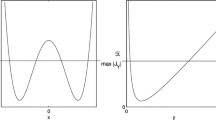
This problem is solved by (cf. Fig. 2)
with
Note that \(d_\alpha = \frac{1}{2} \sinh (\frac{\sqrt{2}}{\alpha })+\frac{1}{2}\sin (\frac{\sqrt{2}}{\alpha })>0\). We have:
Theorem 4
Let \( \alpha >0 \) and \( rc _\alpha \) as in (19). Then \( rc _\alpha (x)<0 \) for all \(x \in (-1,1)\).
Proof
Let us abbreviate \(\beta =\frac{1}{\alpha \sqrt{2}}\). For \( x \in [-1,1] \) we compute with the help of Corollary 4 from Appendix C with \( a = \beta \)
The statement then follows since equality only holds at \( x= \pm 1 \). \(\square \)
Theorem 5
Let \(a_c \in (\pi , \frac{3}{2} \pi )\) denote the smallest, strictly positive solution of the equation \(\tanh (x)=\tan (x)\) (see Lemma 6 in Appendix B) and \(\alpha _{{\text {crit}}} = \frac{1}{a_c \sqrt{2}}\approx 0.18008\). Then \( rc _\alpha '(x)>0\) for all \(x \in (0,1)\) and all \(\alpha \ge \alpha _{{\text {crit}}}\).
Proof
Let us abbreviate again \(\beta =\frac{1}{\alpha \sqrt{2}}\). It follows from Lemma 7 in Appendix C with \( a = \beta \) that for every \(x \in (0,1)\)
since \(0<\beta \le a_c\). \(\square \)
Remark 1
The end of the proof of Lemma 7 shows that for \(\alpha \in (0,\alpha _{{\text {crit}}})\) and \(\alpha \searrow 0\), we observe an increasing number of sign changes of \( rc _\alpha ' \).

Plots of the rate of change function \( rc _\alpha \) for two different values of \( \alpha \) around the value \(\alpha _{{\text {crit}}}\approx 0.18008\) in accordance with Theorems 4 and 5. The function for \( \alpha =0.17 \) develops an oscillatory behaviour with oscillations starting at the origin \( x=0 \)
5 Existence of minimisers via gluing techniques
We start with a discussion of symmetric positive profile curves satisfying \(H \equiv 0\), i.e.
The corresponding solutions are the catenaries
with boundary values \(c \cosh (\frac{1}{c})\) and surface area
A discussion of the function \(c \mapsto c \cosh (\frac{1}{c})\) shows that
where \(c_0 \approx 0.8336\) is the positive solution of the equation \(c_0 =\tanh (\frac{1}{c_0})\). Setting \(\alpha _0:= c_0 \cosh (\frac{1}{c_0}) \approx 1.5089\) we infer that the equation
has two solutions \(c_1(\alpha )> c_0 > c_2(\alpha )\) if \(\alpha >\alpha _0\), one solution \(c_1(\alpha )\) if \(\alpha =\alpha _0\) and no solution for \(\alpha <\alpha _0\). Although presumably folklore and asymptotically obvious for \(\alpha \rightarrow \infty \), we could not locate an easy reference for the following statement which is quite important in what follows:
For the reader’s convenience we give a proof in Appendix A.
In what follows we shall write
In particular it follows from (24) that
In order to make the role of \(v_\alpha \) in the minimisation of \({\mathscr {A}}\) more precise it is convenient to relax the class of profile curves and consider for a given boundary value \( \alpha >0 \)
where the area functional is now given by
In order to formulate the main result concerning the minimisation of \({\mathscr {A}}\) over \({\mathscr {C}}_\alpha \) we introduce for \(\alpha >0\) the Goldschmidt solution \(\gamma _\alpha \) as a \(C^{0,1}\) parametrisation of the polygon \(P_- Q_- Q_+ P_+\), where \(P_{\pm }=(\pm 1,\alpha ), Q_{\pm }=(\pm 1,0)\). As a geometric object the Goldschmidt solution corresponds to two disks with radius \(\alpha \) and centers \(Q_-,Q_+\) and its surface area is given by \({\mathscr {A}}(\gamma _ \alpha ) \,=\, 2 \pi \alpha ^2\). Appendix A shows also that \({\mathscr {A}}(v_{\alpha })={\mathscr {A}}(\gamma _\alpha )\) if and only if \(\alpha = \alpha _m = c_m \cosh (\frac{1}{c_m})\approx 1.895\), where \(c_m\approx 1.564\) is the unique solution of the equation
For \(\alpha >\alpha _m\) we have \({\mathscr {A}}(v_{\alpha })< {\mathscr {A}}(\gamma _\alpha )\) while \({\mathscr {A}}(\gamma _\alpha )< {\mathscr {A}}(v_\alpha )\) for \(\alpha <\alpha _m\). The following result is then a special case of Theorem 1 in [25, Chapter 8, Section 4.3]:
Theorem 6
(Absolute minimisers of the area functional) For every \(\alpha >0\) the variational problem
has a solution. This solution is furnished by the catenary \(t \mapsto (t,v_{\alpha }(t))\) if \(\alpha > \alpha _m\), the Goldschmidt solution \(\gamma _\alpha \) if \(\alpha < \alpha _m\) and both of them if \(\alpha =\alpha _m\). Except for reparametrisation there are no further solutions.
We use the above result in order to prove the following lemma.
Lemma 2
Suppose that \(\alpha \ge \alpha _m\). For \(u \in N_\alpha \) there exists \(v \in N_\alpha \) such that \(v'(x)<v_{\alpha }'(x)\) for all \(x \in (0,1]\) and \({\mathscr {H}}_\varepsilon (v) \le {\mathscr {H}}_\varepsilon (u)\). If u has finitely many critical points, then the same holds for v. In particular we have that \(v(x) > v_\alpha (x)\) for all \(x \in (-1,1)\).
Proof
Since \(u'(1)=0<v_\alpha '(1)\), there exists \(x_0 \in [0,1)\) such that
If \(x_0=0\) set \(v=u\), otherwise define
Clearly,
Suppose that \({\hat{c}}=c_\alpha \). Then, in view of (26) and (29) we have that \(v_\alpha (x) \ge u(x)\) for \(x \in [x_0,1]\) and hence \(v_\alpha '(1) \le u'(1)=0\), a contradiction, so that \({\hat{c}}> c_\alpha \). Assume next that \(x_1 \in \lbrace x_0,1 \rbrace \). Using again (26), (29) as well as (28) we infer that
which is in either case a contradiction to \({\hat{c}} > c_{\alpha }\). As a result we deduce that \(x_1 \in (x_0,1)\), which implies that \(w_{{\hat{c}}}'(x_1) = u'(x_1)\). The function

Construction of v by attaching an appropriate catenary to u at \( -x_1 \) and \( x_1 \)
(see Fig. 3) then belongs to \(N_\alpha \). Since the catenoid given by \(w_{{\hat{c}}}\) has zero mean curvature we have
where \({\hat{u}}(x)= \frac{1}{x_1} u(x_1 x), x \in [-1,1]\). Since \(\frac{{\hat{c}}}{x_1}> {\hat{c}} > c_\alpha \ge c_0\), it follows from (27) that
and Theorem 6 implies that \(w_{{\hat{c}}/x_1}\) is a global minimum for the area functional in the class \({\mathscr {C}}_{{\hat{\alpha }}}\) with \({\hat{\alpha }}=\frac{{\hat{c}}}{x_1} \cosh (\frac{x_1}{{\hat{c}}})\). Taking into account that \(w_{{\hat{c}}/x_1}(\pm 1){\mathop {=}\limits ^{\text{ def }}}\frac{{\hat{c}}}{x_1}\cosh \left( \frac{x_1}{{\hat{c}}} \right) =\frac{1}{x_1} w_{{\hat{c}}} (x_1) {\mathop {=}\limits ^{(29)}}\frac{1}{x_1} u(x_1) {\mathop {=}\limits ^{\text{ def }}}{\hat{u}}(\pm 1) \) we hence infer that
giving \({\mathscr {H}}_\varepsilon (v) \le {\mathscr {H}}_\varepsilon (u)\). We see from the construction that v has finitely many critical points if this was the case for u. Finally, the inequality \(v(x) > v_\alpha (x), \, x \in (-1,1)\) easily follows by integration. \(\square \)
Lemma 3
Let \(\alpha \ge \alpha _m\) and \(\varepsilon \ge {\hat{\varepsilon }}_\alpha \). Suppose that \(u \in N_\alpha \) has finitely many critical points and satisfies \(u'(x)<v_{\alpha }'(x)\) for all \( x \in (0,1]\). Then there exists \(v \in N_\alpha \) such that \(0 \le v'(x) < v_{\alpha }'(x)\) for \(x \in (0,1]\) and \({\mathscr {H}}_{\varepsilon }(v) \le {\mathscr {H}}_{\varepsilon }(u)\). In particular, we have that \(v_{\alpha }(x)< v(x) \le \alpha \) for all \(x \in (-1,1)\).
Proof
Let us assume that \(u'(x_0)<0\) for some \(x_0 \in (0,1)\). Then there exists an interval \([a,b] \subset [0,1]\) such that
Let us define
see Fig. 4. Clearly, \(v \in H^2(-1,1)\) is even with

Construction of the function v from u by inserting a cylinder in the intervals \( [-b,-a], ~[a,b] \) and translating the inner part to match the cylinder
so that \(v'(x)<v_\alpha '(x)\) for \( x \in (0,1]\) and \(v'(x) \ge 0\) for \(x \in [a,1]\). As a consequence,
and in particular v is positive on \([-1,1]\), so that \(v \in N_\alpha \). Next, since \(u'(x)<0\) for \(x \in (a,b)\) we have that \(u(x) \ge u(b)\) for \(x \in [a,b]\) and therefore recalling (26)
Combining the above inequality with the fact that \(z\mapsto 4 \varepsilon z + \frac{1}{z}\) is increasing for \(z \ge \frac{1}{\sqrt{4 \varepsilon }}\) we infer that
Furthermore, in view of the definition of v and the fact that \(v(x) \le u(x)\) for \(x \in [-b,b]\) we have
If we insert (33) and (34) into (8) we deduce that \({\mathscr {H}}_\varepsilon (v) \le {\mathscr {H}}_\varepsilon (u)\). Note that \(v_{|[-a,a]}\) has less critical points than u. If \(v'(x_1)<0\) for some \(x_1 \in (0,a)\) we can repeat the above procedure on \([-a,a]\) until we obtain a function with the desired properties in finitely many steps. \(\square \)
Remark 2
Lemma 3 is an improvement of [43, Lemma 4.8] thanks to the better bound (32) from below. There the condition on \( \alpha \) and \( \varepsilon \) is given by
where \( \sigma \in (0, \alpha ) \) is some appropriate constant. But equation (35) implies \( 4\le 4 \frac{4 \varepsilon \alpha \, ( \alpha ^2 /4)}{4 \varepsilon \alpha ^2 }=\alpha . \) With the better bounds in Theorem 7 we are able to decrease this range down to \( \alpha _m\) (and to admit arbitrarily large \(\varepsilon \)).
Theorem 7
Assume that \( \alpha \ge \alpha _ m \) and that \(\varepsilon \ge {\hat{\varepsilon }} _ \alpha \). Then the Helfrich functional \( {\mathscr {H}} _ \varepsilon \) admits a minimiser \( u \in N_ \alpha \), which satisfies
The function u belongs to \(C^\infty ([-1,1])\) and solves the Dirichlet problem (12), (13). Furthermore, there exists a constant \(c \in {\mathbb {R}}\) such that
Proof
Let \( ({\tilde{u}}_k) _ {k \in {\mathbb {N}}} \subset N_ \alpha \) be a minimising sequence, which we may assume to consist of functions with only finitely many critical points (e.g. polynomials). In view of Lemma 2 and Lemma 3 we may pass to a minimising sequence \((u_k)_{k \in {\mathbb {N}}} \subset N_\alpha \) such that
so that \((u_k)_{k \in {\mathbb {N}}}\) is bounded in \(C^1([-1,1])\). Arguing as in the proof of Theorem 1 we obtain the existence of a minimiser \(u \in N_\alpha \) of \({\mathscr {H}}_{\varepsilon }\), which is even in \(C^{\infty }([-1,1])\) thanks to elliptic regularity for the Euler-Lagrange equation. Furthermore, \(u'(x) \ge 0\) for \(x \in [0,1]\). Since u is a critical point of the Helfrich functional, it satisfies (12), (13) as shown in Sect. 2. Let us next denote the left hand side of (38) by M[u]. Using Lemma 4 in Appendix B together with (12) we obtain that \(\frac{\mathop {}\!\mathrm {d}}{\mathop {}\!\mathrm {d}x} M[u](x) = 0\) which implies (38).
Let us next prove the strict inequality \(u'(x)>0, x \in (0,1)\). If \({\hat{x}} \in [0,1]\) is a point satisfying \(u'({\hat{x}})=0\), then (38) yields
which simplifies to
Let us assume that there exists \(x_0 \in (0,1)\) with \(u'(x_0)=0\). Since we already know that \(u' \ge 0\) in [0, 1] we infer that \(u''(x_0)=0\). Using (39) for \({\hat{x}}=0\) and \({\hat{x}} = x_0\) we obtain
where the last inequality follows since \(z \mapsto \frac{1}{4z}+ \varepsilon z\) is strictly increasing for \(z \ge \frac{1}{\sqrt{4 \varepsilon }}\) and \(u(x_0) \ge u(0) \ge c_{\alpha } \ge \frac{1}{\sqrt{4 \varepsilon }}\). In particular, \(u(0)=u(x_0)\) and therefore u is constant on \([0,x_0]\). Standard ODE theory applied to (12) then implies that u is constant on [0, 1] and hence \(u \equiv \alpha \) in view of (13). This implies that \(H \equiv \frac{1}{2 \alpha }\) and then again by (12) that \(\varepsilon = \frac{1}{4 \alpha ^2}\). Using the relation \(\alpha = c_{\alpha } \cosh (\frac{1}{c_{\alpha }})\) we then obtain
contradicting our assumption that \(\varepsilon \ge {\hat{\varepsilon }}_\alpha \). Thus, \(u'(x)>0\) for \(x \in (0,1)\). Since u has only finitely many critical points we may assume in view of Lemma 2 and Lemma 3 that u is a minimiser with the additional property that \(0<u'(x)< v_\alpha '(x)\) for \(x \in (0,1)\), which is (36). The inequalities in (37) then follow immediately. \(\square \)
Corollary 2
Assume that \( \alpha \ge \alpha _ m \). Then for any \(\varepsilon \ge 0\) the Helfrich functional \( {\mathscr {H}} _ \varepsilon \) admits a minimiser \( u \in N_ \alpha \), which belongs to \(C^\infty ([-1,1])\) and solves the Dirichlet problem (12), (13).
Proof
Since \(4c>\cosh (\frac{1}{c})\) for \(c\ge c_m\), we have \(\frac{1}{\alpha } > {\hat{\varepsilon }}_\alpha \) for all \(\alpha \ge \alpha _m\). Combining Theorems 1 and 7 yields the claim. \(\square \)
Let us next investigate the behaviour of minimisers as \(\varepsilon \rightarrow \infty \).
Corollary 3
Let \(\alpha \ge \alpha _m\) and \((u_{\varepsilon })_{\varepsilon \ge {\hat{\varepsilon }}_\alpha }\) a sequence of minimisers of \({\mathscr {H}}_{\varepsilon }\) as obtained in Theorem 7. Then, \(u_{\varepsilon } \rightarrow v_{\alpha }\) in \(W^{1,p}(-1,1)\) as \(\varepsilon \rightarrow \infty \) for all \(1 \le p < \infty \).
Proof
Let \((\varepsilon _k)_{k \in {\mathbb {N}}}\) be an arbitrary sequence with \(\varepsilon _k \ge {\hat{\varepsilon }}_\alpha \) and \( \varepsilon _ k \rightarrow \infty , k \rightarrow \infty \). Abbreviating \(u_k=u_{\varepsilon _k}\) we infer from (36), (37) that \((u_k)_ {k \in {\mathbb {N}}}\) is bounded in \(C^1([-1,1])\). Thus, there exists a subsequence, again denoted by \((u_k)_{k \in {\mathbb {N}}}\), and \(u \in W^{1,\infty }(-1,1)\) such that
In order to identify u we claim that u is a minimiser of \({\mathscr {A}}\) in the class
To see this, let \(v \in C_\alpha \) and fix \(0<\delta \le \frac{1}{2} \min _{[-1,1]}v\). Since \(v-\alpha \in H^1_0(-1,1)\) there exists \(\zeta _{\delta } \in C^{\infty }_0(-1,1)\) (i.e. smooth and compactly supported in \((-1,1)\)), which is even and satisfies \(\Vert v- \alpha - \zeta _\delta \Vert _{H^1} \le \delta \). As a result
so that \(\alpha + \zeta _\delta \in N_\alpha \). Thus, \({\mathscr {H}}_{\varepsilon _k}(u_k) \le {\mathscr {H}}_{\varepsilon _k}(\alpha + \zeta _{\delta })\), which implies that
Sending \(k \rightarrow \infty \) we infer with the help of the sequential weak lower semicontinuity of \({\mathscr {A}}\) in \(H^1(-1,1)\) that
Since \(\delta \) can be chosen arbitrarily small we deduce that \({\mathscr {A}}(u)=\min _{v \in C_\alpha } {\mathscr {A}}(v)\) and hence
Note that the above relation is first obtained for all even \(\varphi \in C^{\infty }_0(-1,1)\) and then extended to arbitrary \(\varphi \in C^{\infty }_0(-1,1)\) using a splitting into an even and an odd part. Hence u is a weak solution of (22) and it is not difficult to see that \(u \in C^2([-1,1])\), so that \(u \equiv w_{c_1(\alpha )}\) or \(u \equiv w_{c_2(\alpha )}\). Recalling that \({\mathscr {A}}(w_{c_1(\alpha )}) < {\mathscr {A}}(w_{c_2(\alpha )})\) we deduce that \(u = w_{c_1(\alpha )}=v_\alpha \) and hence \((u_k)_{k \in {\mathbb {N}}}\) converges uniformly to \(v_{\alpha }\). Furthermore, recalling that \(0 \le u_k'(x) \le v_\alpha '(x), \, x \in [0,1]\) we have that
This implies that \(u_k' \rightarrow v_\alpha '\) in \(L^p(-1,1)\) for all \(1 \le p < \infty \) since \((u_k')_{k \in {\mathbb {N}}}\) is uniformly bounded. A standard argument then shows that the whole sequence converges to \(v_\alpha \) in \(W^{1,p}(-1,1)\) for every \(1 \le p < \infty \). \(\square \)
6 Summary and outlook
In this article we studied the Dirichlet problem (12, 13) for Helfrich surfaces of revolution depending on the parameters \( \alpha >0 \) for the boundary value and the weight factor \( \varepsilon \ge 0 \). Fig. 1 in the introduction gives an overview over the existence results for solutions and in particular minimisers of the Helfrich functional.
According to Corollary 2 we have the existence of minimisers of \( {\mathscr {H}}_ \varepsilon \) in \( N_ \alpha \cap C^\infty ([-1,1]) \) for all \( \alpha \ge \alpha _m \) and for all \( \varepsilon \ge 0\). On the other hand, with Theorem 2(ii) we can ensure that for every \( \alpha >0 \) and \( \varepsilon \ge 0 \) less than a sufficiently small \( \varepsilon _0 (\alpha )\) there exists a Helfrich minimiser. Our hope was to be able to prove existence of minimisers also for \( \alpha < \alpha _ m \) and for all \( \varepsilon \ge 0 \). This turned out to be a hard task (too hard for us) because minimisers tend to develop oscillations being created around \( x=0 \) and therefore gluing techniques do not seem to work. A first attempt to study this domain of parameters was done in Sect. 4. In particular Theorem 5, the analysis in Appendix C and Fig. 2 show that for \( \alpha < \alpha _{{\text {crit}}}\approx 0.18008 \) oscillatory behaviour of the rate of change function occurs, leading us to anticipate a similar behaviour for minimisers in the vicinity of the Helfrich cylinders. We conjecture that for any \( \alpha < \alpha _m \) there will be some \( {\tilde{\varepsilon }} _ \alpha \) such that for \( \varepsilon > {\tilde{\varepsilon }} _ \alpha \) (except possibly \(\varepsilon _ \alpha \)) all minimisers show oscillatory behaviour around the cylinder \(x\mapsto \frac{1}{2\sqrt{\varepsilon }}\). Theorem 5 and Lemma 7 indicate that for \(\alpha \in (0,\alpha _{{\text {crit}}})\) one may expect that even \( {\tilde{\varepsilon }} _ \alpha < \varepsilon _ \alpha \). This expectation is supported by numerical experiments.
The benefit of using gluing techniques like those we used in Sect. 5 is that we obtain qualitative results for the minimisers. In Theorem 7 we found that for \( \alpha > \alpha _m \) and \( \varepsilon > {\hat{\varepsilon }} _ {\alpha } \) the minimisers lie below the Helfrich cylinder, i. e. its boundary value at \( \alpha \). We expect this to be true for all \( \alpha >0 \) and \( \varepsilon > \varepsilon _ \alpha \). On the other hand we do not know anything for the regime \( 0<\varepsilon < \varepsilon _ \alpha \) other than the linearisation results from Sect. 4 which indicate that minimisers start to grow as \( \varepsilon \) decreases. Thus we expect for these minimisers to lie above the Helfrich cylinder and possibly below the Willmore minimisers.
To conclude, let us collect some open problems:
-
1.
\( \alpha \ge \alpha _m \): In Corollary 3, do we have smooth convergence away from the boundary as \( \varepsilon \nearrow \infty \), i.e. in any \(C^m_{{\text {loc}}} (-1,1)\)?
-
2.
\( \alpha < \alpha _m \): Existence of minimisers for all \( \varepsilon >0 \)?
-
3.
\( \alpha < \alpha _m \): Analogously to Corollary 3, does the sequence of minimisers \( (u_ \varepsilon )_ {\varepsilon >0} \) converge to the Goldschmidt solution as \( \varepsilon \nearrow \infty \)? In which sense?
-
4.
\( \alpha < \alpha _m \): What happens in the boundary layer as \( \varepsilon \nearrow \infty \)?
-
5.
\( 0< \varepsilon < \varepsilon _ \alpha \): Do minimisers lie below the Willmore minimisers and above the Helfrich cylinder, i. e. \(x\mapsto \alpha \)?
-
6.
\( \varepsilon > \varepsilon _ \alpha \): Do minimisers lie below the Helfrich cylinder, i. e. \( x\mapsto \alpha \)?
-
7.
Are there parameter intervals for \(\alpha \) such that the values \( u_ \varepsilon (x) \) of (suitable) Helfrich minimisers for \( x \in [-1,1] \) are a decreasing function in \( \varepsilon \)?
-
8.
Can one quantify the domain where oscillatory behaviour occurs?
-
9.
Can one expect uniqueness of minimisers, at least in some parameter regime? To our knowledge this question is completely open.
References
Barrett, J.W., Garcke, H., Nürnberg, R.: Stable variational approximations of boundary value problems for Willmore flow with Gaussian curvature. IMA J. Numer. Anal. 37(4), 1657–1709 (2017)
Bauer, M., Kuwert, E.: Existence of minimizing Willmore surfaces of prescribed genus. Int. Math. Res. Not. 2003(10), 553–576 (2003)
Bergner, M., Dall’Acqua, A., Fröhlich, S.: Willmore surfaces of revolution with two prescribed boundary circles. J. Geom. Anal. 23(1), 283–302 (2013)
Bergner, M., Jakob, R.: Sufficient conditions for Willmore immersions in \({\mathbb{R}}^3\) to be minimal surfaces and Erratum. Ann. Glob. Anal. Geom. 45(2), 129–146 (2014)
Bernard, Y., Wheeler, G., Wheeler, V.-M.: Rigidity and stability of spheres in the Helfrich model. Interfaces Free Bound. 19(4), 495–523 (2017)
Brazda, K., Lussardi, L., Stefanelli, U.: Existence of varifold minimizers for the multiphase Canham-Helfrich functional. Calc. Var. Partial Differ. Equ. 59, article no. 93 (2020)
Bryant, R., Griffiths, P.: Reduction for constrained variational problems and \(\int \frac{1}{2}k^ 2\,{\rm d} s\). Am. J. Math. 108(3), 525–570 (1986)
Canham, P.B.: The minimum energy of bending as a possible explanation of the biconcave shape of the human red blood cell. J. Theor. Biol. 26(1), 61–76 (1970)
Choksi, R., Morandotti, M., Veneroni, M.: Global minimizers for axisymmetric multiphase membranes. ESAIM Eur. Ser. Appl. Ind. Math COCV Control Optim. Calc. Var. 19(4), 1014–1029 (2013)
Choksi, R., Veneroni, M.: Global minimizers for the doubly-constrained Helfrich energy: the axisymmetric case. Calc. Var. Partial. Differ. Equ. 48(3–4), 337–366 (2013)
Da Lio, F., Palmurella, F., Rivière, T.: A resolution of the Poisson problem for elastic plates. Arch. Ration. Mech. Anal. 236(3), 1593–1676 (2020)
Dall’Acqua, A., Deckelnick, K., Grunau, H-Ch.: Classical solutions to the Dirichlet problem for Willmore surfaces of revolution. Adv. Calc. Var. 1(4), 379–397 (2008)
Dall’Acqua, A., Deckelnick, K., Wheeler, G.: Unstable Willmore surfaces of revolution subject to natural boundary conditions. Calc. Var. Partial Differ. Equ. 48(3–4), 293–313 (2013)
Dall’Acqua, A., Fröhlich, S., Grunau, H-Ch., Schieweck, F.: Symmetric Willmore surfaces of revolution satisfying arbitrary Dirichlet boundary data. Adv. Calc. Var. 4(1), 1–81 (2011)
Deckelnick, K., Grunau, H-Ch.: A Navier boundary value problem for Willmore surfaces of revolution. Analysis 29, 229–258 (2009)
Deckelnick, K., Grunau, H-Ch., Röger, M.: Minimising a relaxed Willmore functional for graphs subject to boundary conditions. Interfaces Free Bound. 19(1), 109–140 (2017)
Deimling, K.: Nonlinear Funct. Anal. Springer-Verlag, Berlin etc (1985)
Doemeland, M.: Axialsymmetrische Minimierer des Helfrich-Funktionals, Master’s thesis, Otto-von-Guericke-Universität Magdeburg (2017), available online at https://www.math.ovgu.de/grunau.html
Eichmann, S.: The Helfrich boundary value problem. Calc. Var. 58(1), 34 (2019)
Eichmann, S., Grunau, H-Ch.: Existence for Willmore surfaces of revolution satisfying non-symmetric Dirichlet boundary conditions. Adv. Calc. Var. 12, 333–361 (2019)
Eichmann, S., Koeller, A.: Symmetry for Willmore surfaces of revolution. J. Geom. Anal. 27(1), 618–642 (2017)
Euler, L.: Opera Omnia, Ser. 1, 24, Zürich: Orell Füssli (1952)
Gazzola, F., Grunau, H-Ch., Sweers, G.: Polyharmonic Boundary Value Problems, Lecture Notes in Mathematics 1991, Springer-Verlag, Berlin (2010)
Germain, S.: Recherches sur la théorie des surfaces élastiques. Mme. Ve. Courcier (1821)
Giaquinta, M., Hildebrandt, S.: Calculus of Variations, Vol. I and II. Grundlehren der mathematischen Wissenschaften 310, 311, Springer-Verlag, Berlin etc. (2004)
Grunau, H.-Ch.: The asymptotic shape of a boundary layer of symmetric Willmore surfaces of revolution. In: Inequalities and applications 2010, Internat. Ser. Numer. Math.161, 19–29, Birkhäuser/Springer, Basel (2012)
Helfrich, W.: Elastic properties of lipid bilayers: Theory and possible experiments. Z. Naturforsch. Teil C 28(11), 693–703 (1973)
Kuwert, E., Schätzle, R.: Gradient flow for the Willmore functional. Commun. Anal. Geom. 10(2), 307–339 (2002)
Kuwert, E., Schätzle, R.: Removability of point singularities of Willmore surfaces. Ann. Math. (2) 160(1), 315–357 (2004)
Kuwert, E., Schätzle, R.: The Willmore functional. In: Topics in modern regularity theory, vol. 13 of CRM Series, pp. 1–115. Ed. Norm., Pisa (2012)
Mandel, R.: Explicit formulas, symmetry and symmetry breaking for Willmore surfaces of revolution. Ann. Glob. Anal. Geom. 54(2), 187–236 (2018)
Marques, F.C., Neves, A.: The Willmore Conjecture. Jahresber. Dtsch. Math.-Ver. 116(4), 201–222 (2014)
Mayer, U.F., Simonett, G.: A numerical scheme for axisymmetric solutions of curvature-driven free boundary problems, with applications to the Willmore flow. Interfaces Free Bound. 4(1), 89–109 (2002)
Nitsche, J.C.C.: Boundary value problems for variational integrals involving surface curvatures. Quart. Appl. Math. 51(2), 363–387 (1993)
Novaga, M., Pozzetta, M.: Connected surfaces with boundary minimizing the Willmore energy. Math. Eng. 2(3), 527–556 (2020)
Ou-Yang, Z.C.: Elasticity theory of biomembranes. Thin Solid Films 393, 19–23 (2001)
Poisson, S.D.: Mémoire sur les surfaces Élastiques, Mém. de l’Inst., pp. 167–226 (1812; pub. 1816)
Pozzetta, M.: On the Plateau-Douglas Problem for the Willmore energy of surfaces with planar boundary curves. ESAIM (European Series in Applied and Industrial Mathematics): COCV (Control, Optimisation and Calculus of Variations), to appear. Available online at https://doi.org/10.1051/cocv/2020049
Rivière, T.: Analysis aspects of Willmore surfaces. Invent. Math. 174(1), 1–45 (2008)
Rusu, R.E.: An algorithm for the elastic flow of surfaces. Interfaces Free Bound. 7(3), 229–239 (2005)
Schätzle, R.: Lower semicontinuity of the Willmore functional for currents. J. Differ. Geom. 81(2), 437–456 (2009)
Schätzle, R.: The Willmore boundary problem. Calc. Var. Partial Differ. Equ. 37(3–4), 275–302 (2010)
Scholtes, S.: Elastic Catenoids. Analysis 31(2), 125–143 (2011)
Simon, L.: Existence of surfaces minimizing the Willmore functional. Comm. Anal. Geom. 1(2), 281–326 (1993)
Thomsen, G.: Über konforme Geometrie I: Grundlagen der konformen Flächentheorie. Abh. Math. Sem. Hamburg 3, 31–56 (1923)
Willmore, T.J.: Note on embedded surfaces. An. Ştiinţ. Univ. Al. I. Cuza Iaşi Seçt. I a Mat 11, 493–496 (1965)
Willmore, T.J.: Riemannian Geometry. Oxford Science Publications. The Clarendon Press, Oxford University Press, New York (1993)
Acknowledgements
We are grateful to the referee for his or her very careful reading of the manuscript and for his or her very helpful suggestions.
Funding
Open Access funding enabled and organized by Projekt DEAL
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by A.Malchiodi.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
The “small” and the “large” catenoid
For the reader’s convenience we collect some arguments, which do not only show inequality (25) but also the remarks before Theorem 6. We do not claim originality, but we could not locate a reference for what follows.
We consider \(c\in (0,\infty )\) as independent variable and use as before \(w_c\) for the corresponding catenoids and the radii of their boundary circles
as a function of c. We calculate the first three derivatives:
As remarked above, \(\alpha '(c)=0 \Leftrightarrow c=\tanh \left( \frac{1}{c}\right) \Leftrightarrow c=c_0\). The strict monotonicity of \(\alpha ''\) yields
Using \(\alpha '(c_0)=0\), integration yields \( \forall c\in (0,c_0):\quad -\alpha '(c_0-c) > \alpha '(c_0+c). \) After a further integration we come up with
The idea in proving (25) consists in comparing the area of the catenoids \(w_c\) and of the Goldschmidt solutions \(\gamma _{\alpha (c)}\):
We hence define the function
One may note that g may be smoothly extended to \([0,\infty ) \). As above we calculate the first three derivatives:
We observe that \(g(\, .\, )\) has the same unique critical point as \(\alpha (\, .\, )\), i.e. \(g'(c)=0\Leftrightarrow c=c_0\),
As for \(\alpha \) we conclude from the strict monotonicity of the second derivatives and from \(g'(c_0)=0\) that
We may now prove (25) and take any \(\alpha >\alpha _0\). As above we choose
Inequality (40) yields
Since \(\alpha (\, .\, )\) is strictly increasing on \((c_0,\infty )\), this yields
On the other hand, \(g(\, .\, )\) is strictly decreasing on \((c_0,\infty )\), and we find by means of (41)
Since the Goldschmidt contribution is the same for \(c_1(\alpha )\) and \(c_2(\alpha )\), we come up with
as claimed. Finally one should note that \(g(c)<0\Leftrightarrow c>c_m\), which shows that in this regime, the “small” catenoid \(w_{c_1(\alpha )}\) has smaller area than the Goldschmidt solution as well as the “large” catenoid \(w_{c_2(\alpha )}\).
Divergence form of the Helfrich equation
We note that the form of M[u] in the case \(\varepsilon =0\) is derived in [13, Theorem 3] and is a consequence of the invariance of the Willmore functional with respect to translations. This means that the Helfrich equation can be written in divergence form. For the Willmore equation this was observed and exploited by Rusu [40], Rivière [39] and many others.
Lemma 4
For \(u \in C^4([-1,1])\) let
Then we have
Proof
A straightforward calculation shows that
Combining the above relations and taking into account that
we obtain
\(\square \)
Estimating the oscillations
In order to prove the auxiliary results used in Sect. 4 we will give a description of the oscillatory behaviour of the functions
where A, B and a are given constants.
Lemma 5
Let \( K \not = 0 \) be a given constant and consider the function
Then for all \( y \in [0,1) \) we have \( \eta (y) >0 \). Furthermore:
-
a)
If \(K < -1\), then there exists \(y_*\in (0,\frac{1}{\sqrt{2}})\) such that \(1+K \eta (y_*)=0\) and \(1 + K \, \eta (y)<0\) on \((0,y_ *) \), \(1 + K \, \eta (y)>0\) on \((y _ *,1) \).
-
b)
If \(K \ge -1\), then \(1+ K \eta (y)>0\) for all \(y \in (0,1)\).
Proof
Rewriting
shows that \(\eta (\, .\,)\) is strictly decreasing and hence that \(\eta (y)>0\) for \(y \in [0,1)\). If \(K<-1\) a calculation shows that
which implies (a) with \(y_ *= \bigl ( \frac{1 + \frac{1}{K} }{1 - K} \bigr )^{\frac{1}{2}}\). Note that \(y_*\in (0, \frac{1}{\sqrt{2}})\), since \(K<-1\). The assertion (b) is straightforward. \(\square \)
Proposition 1
Consider constants \( a \not = 0 \) and A, B which do not vanish simultaneously, i. e. \( A \not = 0 \) or \( B \not = 0 \). Define the even function
Then the local extrema of h are isolated and strictly increasing in their absolute values on the positive real axis, i. e.
Proof
Without loss of generality we assume that \( a = 1 \) since h is symmetric and the statement is invariant under linear transformations. Since the case where \(A=0\) or \(B=0\) is quite simple we may assume that \(A\not =0\) and \(B\not =0\). Further we can restrict ourselves to the case \( A > 0 \); otherwise \(- h\) is considered. Setting \( A=1 \) would also be admissible but we like to keep the “A” to highlight the connection to B in the following discussion. Because \(h''(x)=-2A \sinh (x) \, \sin (x)-2B \cosh (x) \, \cos (x)\) we see that h has also a strict local minimum in 0 iff \(B<0\) and a strict local maximum in 0 iff \(B\ge 0\). In the first case h must have a further extremum before its first zero.
First of all we rewrite
with
and \( \varphi \) is the smooth angular map defined modulo \( 2 \pi \) by
We choose \( \varphi \) such that it is uniquely determined by \( \varphi (0)=0 \), i. e. \( \varphi (x) \in (- \pi /2 , \pi /2) \). If \(B>0\) then \( \varphi (x) \in [0 , \pi /2) \), if \(B<0\) then \( \varphi (x) \in (- \pi /2 , 0]\), and if \(B=0\), then \( \varphi (x)\equiv 0\). For the derivative of \( \varphi \) we compute
which yields
Putting \(K=\frac{B}{A}\) and \(y=\tanh (x)\) we apply Lemma 5 to \(\eta (y):= \frac{1}{K} \varphi '(x)\). Observing that \(\frac{\mathop {}\!\mathrm {d}}{\mathop {}\!\mathrm {d}x}(x+ \varphi (x))=1+K\eta (y)\) we see that \(\frac{\mathop {}\!\mathrm {d}}{\mathop {}\!\mathrm {d}x}(x+ \varphi (x))\) is either always positive or negative first and then positive. Because \(x+ \varphi (x)>-\frac{\pi }{2}\), \({\text {Id}} + \varphi \) has to become strictly increasing before the first zero of h. Denoting \(0<x_1<\ldots<x_k<\ldots \) the zeroes of h this shows:
In particular
Moreover, \(|\cos (x+ \varphi (x))|\) attains in each interval \((x_k,x_{k+1})\) the value 1.
Next we also rewrite the derivative of h
with
and the smooth function \( \psi \) determined by
Here we choose \( \psi (0) = \frac{\pi }{2} \) in case \( -A < B \), \( \psi (0)=0 \) if \( -B=A \) and \( \psi (0) = - \frac{\pi }{2} \) else, such that \( \psi (x) \in (- \pi , \pi ) \). Similar to \( \varphi \) we have
Let \(0=y_0<y_1<\ldots<y_k<\ldots \) denote the zeroes of \(h'\).
Now, since E and F are strictly increasing, the proposition follows if we are able to show the claim:
Claims (C) and (D) yield the proof of the proposition, because:
-
Case \(B\ge 0\), 0 is a local maximum of h: We shall see that \(0=y_0<x_1<\ldots< y_k< x_{k+1}< y_{k+1}<\ldots \) and the above claims yield:
$$\begin{aligned} \sup _{x\in [x_{k-1},x_k]} |h(x)|= & {} |h(y_{k-1})|<\sup _{x\in [x_{k-1},x_k]} E(x)\le \inf _{x\in [x_{k},x_{k+1}]} E(x)<|h(y_k)|\\= & {} \sup _{x\in [x_{k},x_{k+1}]} |h(x)|. \end{aligned}$$The strict inequalities above are due to the strict monotonicity of E and to the facts that \(h(x_k)=0\) and that \(|\cos (\,.\,)|=1\) once on each \([x_k,x_{k+1}]\).
-
Case \(B < 0\), 0 is a local minimum of h: We shall see that \(0=y_0<y_1<x_1<\ldots< y_k< x_{k}< y_{k+1}<\ldots \) and the above claims yield:
$$\begin{aligned} \sup _{x\in [x_{k-1},x_k]} |h(x)|= & {} |h(y_k)|<\sup _{x\in [x_{k-1},x_k]} E(x)\le \inf _{x\in [x_{k},x_{k+1}]} E(x)<|h(y_{k+1})|\\= & {} \sup _{x\in [x_{k},x_{k+1}]} |h(x)|. \end{aligned}$$
Note that the local extremum at \( x=0 \) has always the smallest absolute value among all local extrema.
To prove the claim we need to discuss several cases (see Fig. 5):

Sketch of the qualitative behaviour of \( \varphi (x) \) and \( \psi (x) \) as x is increased in four different cases. Here the cases \( B=A \), \( B=0 \) and \( B=-A \) are omitted
Case \( 0< A \le B \): Combining (42) and (43) with Lemma 5 by setting \( K= \frac{B}{A} \), resp. \( K = \frac{B-A}{A+B} \), and \( y = \tanh (x) \) we see that \( \varphi \) and \( \psi \) are strictly increasing with
This immediately implies for all \( x > 0 \)
Since \( \mathrm {Id} + \psi \) is strictly increasing we have that \(y_k+\psi (y_k)=(k+1/2)\pi \) and further
Hence, again by strict monotonicity of \( \mathrm {Id} + \psi \)
which proves Claim (D).
Case \( 0 \le B < A \): Applying Lemma 5 once again we see that \( \varphi \) is still strictly increasing, but \( \psi \) is strictly decreasing with
This implies for all \( x>0 \) that \( | \psi (x) - \varphi (x)| < \frac{\pi }{2} \). Moreover, since \(B < A\)
and (44) still holds. Obviously \( \mathrm {Id} + \varphi \) is strictly increasing. But as \( \frac{B-A}{A+B} \ge -1 \) we also get from Lemma 5 that \( \mathrm {Id} + \psi \) is strictly increasing so that \(y_k+\psi (y_k)=(k+1/2)\pi \) as above. Like in the previous case we obtain again the validity of Claim (D).
Case \( -A<B<0 \): \( \varphi \) and \( \psi \) are strictly decreasing with
Similar to the first case this immediately implies (44). The strict monotonicity of \( \mathrm {Id} + \varphi \) follows from Lemma 5 like in the previous step as \( \frac{B}{A} > -1 \). From Lemma 5 with \( \frac{B-A}{A+B} < -1 \) we also know that \( \mathrm {Id} + \psi \) possesses a zero at \( x_ *< \tanh ^{-1}\big ( 1/ \sqrt{ 2 }\big ) \approx 0.8814 \) so that for \( x > x_ *\) it is strictly increasing and decreasing for \( x \in (0, x_ *) \). In the latter situation we have
so that neither h nor \( h' \) have a zero in \( (0, x_ *] \). Hence \(y_1>x_ *\) and
For \(k\in {\mathbb {N}}\) we obtain using the monotonicity behaviour of \( \mathrm {Id} + \varphi \) and \( \mathrm {Id} + \psi \):
We conclude that \(0=y_0<y_1<x_1<\ldots<y_k<x_k< y_{k+1}<\ldots \), which is again Claim (D).
Case \( B \le -A<0 \): We only prove the claim for \( B < -A \). The case \( B= -A \) follows from a similar discussion. Here \( \varphi \) is strictly decreasing and \( \psi \) is strictly increasing with
We first would like to establish the separation property (44). Obviously \( | \varphi (x) - \psi (x) | < \frac{\pi }{2} \) holds for all \( x > 0 \). Unfortunately \( \varphi \) and \( \psi \) will intersect in a point \( x_ *> 0 \) so that (44) will only hold for \( x > x_ *\). For \( x > 0 \) we consider the “distance” between \( \varphi \) and \( \psi \) given by
If we substitute \(y=\tanh (x)\) we find that \(G(x)^2=0\) if
whose positive solution is given by \(y_*=\bigl ( \frac{A (A+B)}{B(A-B)} \bigr )^ { \frac{1}{2} }\). Recalling that \(B< -A<0\) we find
Thus \( \varphi \) and \( \psi \) will intersect in the point \( x_ *= \tanh ^{-1}(y_*) < \tanh ^{-1}\big ( 1/ \sqrt{ 2 }\big ) \approx 0.8814 \). From the strict monotonicity of \( \varphi \) and \( \psi \) we then get that \( \psi (x) < \varphi (x) \) for \( x < x_ *\) and \( \psi (x) > \varphi (x) \) for \( x > x_ *\). Since \(\psi <0\) and \(\varphi <0\) we find that \(x_1>\frac{\pi }{2}, y_1>\frac{\pi }{2}\) and
As in the previous case we see that \( \mathrm {Id} + \varphi \) is strictly increasing on \([\pi /2,\infty )\) and \( \mathrm {Id} + \psi \) on \([0,\infty )\). This yields for \(k\in {\mathbb {N}}\):
We conclude that \(0=y_0<y_1<x_1<\ldots<y_k<x_k< y_{k+1}<\ldots \), so that again Claim (D) holds true. \(\square \)
Remark 3
The proof of Proposition 1 also shows, that we always have
In fact, recalling the function G in (45) we obtain
which shows that the points \(\exp (i\psi (\infty ))\) and \(\exp (i\varphi (\infty ))\) on the unit circle are \(\sqrt{2-\sqrt{2}}\) apart from each other. The claim now follows from \(2\arcsin (\sqrt{2-\sqrt{2}}/2)=\pi /4\).
Corollary 4
Let \( a > 0 \) be given. Then the function
attains its maximum at \( x=1 \).
Proof
Here we apply Proposition 1 with
Note that we can exclude the case \( A = B = 0 \). Otherwise we would have \( \cos (a) = \sin (a) = 0 \) which is not possible. Let h denote the function from Proposition 1 with our choice for A, B and a. In what follows we show, that \( x=1 \) is a local maximum of h. Therefore we compute
We conclude that
From Proposition 1 we conclude, that h(1) as a local maximum satisfies
where \( x \in [0,1) \) is an arbitrary local extremum. In particular this must also hold not only for x being a local extremum, but for any arbitrary point in [0, 1) which proves the claim. \(\square \)
Lemma 6
We consider the function
This function is strictly decreasing on each connected component of its domain of definition,
Since \(f(0)=1\) and \(\lim _{x\rightarrow k\pi \pm 0} f(x)=\pm \infty \) there exists a smallest strictly positive solution \(a_c\in (\pi ,\frac{3}{2}\pi )\) of the equation \(f(x)=1\), i.e.

Graph of \(x\mapsto \frac{\tanh (x)}{\tan (x)}\)
Proof
We calculate for \(x\in D_f\setminus \{0\}\):
\(\square \)
Lemma 7
Let \(a_c\in (\pi ,\frac{3}{2}\pi ))\) be as in Lemma 6. Then for \(a>0\) we have that
iff
Proof
The claim is obvious for \(a\in \pi {\mathbb {N}}\), so we only need to consider \(a\in (0,\infty )\setminus \pi {\mathbb {N}}\). We consider the function f as in Lemma 6.
Case \(a\in (0,\pi )\) :
Since f is strictly decreasing on (0, a), we have for all \(x\in (0,a)\):
In the last step we used that \(\sin (x)>0\), \(\sin (a)>0\).
Case \(a\in (\pi ,a_c]\) :
Here \(f(a)\ge f(a_c)=1\). We consider first \(x\in (\pi , a)\). Thanks to Lemma 6 we start with
Since in this case \(\sin (x)<0\), \(\sin (a)<0\), we end up again with (46). For \(x\in (0,\pi )\), the starting point is
But since now \(\sin (x)>0\), \(\sin (a)<0\), (46) follows again. For \(x=\pi \), the claim is obvious.
Case \(a > a_c\) :
According to Lemma 6 and the definition of \(a_c\), \(f(0,a)={\mathbb {R}}\) so that we always find \(x_1,x_2\in (0,a)\) with
and both \(x_1, x_2\) in the same interval \((k\pi ,(k+1)\pi )\). So the sign of \(\sin (x_1)\) and \(\sin (x_2)\) coincides. Depending on the sign of \(\sin (a)\) one chooses \(x_0=x_1\) or \(x_0=x_2\) respectively and ends up in each case with a point \(x_0\in (0,a)\) for which (46) is violated, while in the other point (46) is satisfied. \(\square \)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Deckelnick, K., Doemeland, M. & Grunau, HC. Boundary value problems for a special Helfrich functional for surfaces of revolution: existence and asymptotic behaviour. Calc. Var. 60, 32 (2021). https://doi.org/10.1007/s00526-020-01875-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00526-020-01875-6