
Abstract
In this paper, a method based on the application of the fuzzy logic technique to diagnose the fault of broken rotor bars in an induction machine has been proposed. Through the decomposition into a wavelet packet, we can detect, identify and prognosis failures in all operating conditions of the machine. The energy calculations for each level of decomposition are richer with the necessary information for fault diagnosis. The latter can be used as input to an intelligent diagnostic system based on fuzzy logic for the detection and classification of the broken bars faults. The advantage of this method is the use of a single current sensor. Indeed, we can detect online, the fault and the number of broken bars with a variable load. The obtained results are very satisfactory. Some results were verified by simulations under MATLAB/Simulink and validated experimentally via dSPACE 1104 card.
Similar content being viewed by others

1 Introduction
For many years, the induction machine (IM) has proven itself in the industry and its applications due to several considerations of robustness, simplicity and reasonable price (Burriel-Valencia et al. 2019). However, it is sometimes exposed to many problems of a different nature (Ameid et al. 2018). Among the most important of these problems and faults that can be found and appear in the induction machine, we find breakage of the rotor bars, the stator short circuit, the eccentricity, …, etc. (Chahine 2018; Martinez et al. 2017; Nemec et al. 2019; Harzelli et al. 2020; Razavi-Far et al. 2017). For a long time, the causes of failures appearing in the machine were various and varied. One of the most common faults is the failure of rotor bars in motors, which has been the subject of many research papers (Martinez et al. 2017; Nemec et al. 2019). This fault that appears in the machine can lead to several human or production losses, which has led researchers to invest in the field of fault diagnosis (Sapena-Bano et al. 2017).
The choice of the fault diagnosis approach depends on the system to be diagnosed and also depends on the complexity of the system. Two main families of procedures are used in the diagnostic field: diagnostic methods based on the analytical model and methods without analytical model (Talhaoui et al. 2017). The references (Ali et al. 2019; Vinoth et al. 2018; Hassanzadeh et al. 2018; Talhaoui et al. 2014) review a large number of failure cases as well as the detection techniques associated with them.
Through research and extensive literature review, we find that signal processing is one of the most important methods used in fault diagnosis. The motor current signature analysis (MCSA) method is the most popular due to several considerations; in particular, it requires only simple and inexpensive equipment (Ameid et al. 2017; Hassan et al. 2018). The signal processing method can be divided into two parts, the first section based on classical techniques such as the fast Fourier transforms (FFT) (Santiago-Perez et al. 2018) and Hilbert analysis (Abd-el Malek et al. 2017), and the second part based on new techniques, namely the windowed Fourier transforms (Burriel-Valencia et al. 2017) and the wavelet technique (Zawad and Liang 2019).
Currently, frequency analysis of measurable quantities is the most frequently used for fault diagnosis. The FFT is one of the most important of these methods used. The main disadvantage of this method is that it is used only in the stationary regime (Martin-Diaz et al. 2018). Therefore, another method must be adopted to solve this problem. The wavelet analysis solution was introduced in 1982 by J. Morlet in order to overcome the above-mentioned difficulties (Martin-Diaz et al. 2018). The wavelet transforms break down into two main categories (Kia et al. 2009): Transformed into continuous wavelets and Transformed into discrete wavelets (DWT). The multi-resolution wavelet analysis was introduced for the first time by Mallat (Kechida et al. 2013). A similar analysis was already carried out by Bouzida (2011) for the detection of rotor faults in the induction machine. Other references (Yahia et al. 2014; Moosavi et al. 2017) have applied the DWT method for the detection of various failures which are the mixed eccentricity and the short circuit of the stator turns.
Automatic fault detection is more important for several reasons, the most important of which is the weakness of the human factor and sometimes due to the pressure of the environment. The choice of an automatic diagnostic method depends essentially on the available knowledge of the process studied (Sun et al. 2018; Ruiming and Hongzhong 2006; Naveena et al. 2015). In general, artificial intelligence is used to discover, diagnose and identify a fault. The most important of these methods is neural networks (NNs) (Sun et al. 2018), support vector machine (Ruiming and Hongzhong 2006) and fuzzy logic (FL) (Naveena et al. 2015). Some bibliographic papers refer to many of the works done by ANN in the field of industrial monitoring and diagnosis, such as (Bazan et al. 2017; Chouai et al. 2000). The major drawback of the ANN technique lies the use in the practical implementation the sensors of high cost. Also, another diagnostic method based on fuzzy logic has been proposed for the diagnosis and classification of faults. In 1965, Lotfi Zadeh published a research work entitled “Fuzzy sets”; where in this research, for the first time, fuzzy logic has been used and has entered into the dictionary of technical words (Zadeh 1965). Several research papers such as (Yan et al. 2019; Ogaji et al. 2005; Dias and Chabu 2008; Das et al. 2016) have used the fuzzy logic technique in many industrial systems maintenance works. Table 1 shows some of the recent work on the applications of fuzzy logic (Table 2).
Fuzzy logic is one of the best methods of classification in several areas, including electrical engineering, energy, medical diagnosis, …, etc. There are many references applying the fuzzy logic method in the field of medicine. This field is considered to be one of the sensitive subjects in diagnosis. Reference (Reddy et al. 2020) proposes an adaptive genetic algorithm with a fuzzy logic model to diagnose heart disease in early stages. Here, the researchers improved the fuzzy logic by applying an adaptive genetic algorithm, where this method was tested on several heart disease data, and it was found that it is superior to several previous methods. The researchers in reference (Al-ali et al. 2021) suggested a method for diagnosing COVID-19 disease. This proposed method, which relies on an adaptive neural inference system, is a powerful technique in clinical practice. This method gave promising results with good accuracy. There are other uses of fuzzy logic such as autonomous car steering where fuzzy logic 2 is used with sliding mode controller to compensate for the variable turbulence, modeling errors, and event start errors, as they are explained in the reference (Ma and Wang 2021). Researchers in Lyridis (2021) suggestion of ant colony improvement with fuzzy logic for local planning of obstacle avoidance paths. This method takes into account the wind, current, waves and dynamic obstacles, as it has proven to be a good method compared to the previous methods.
There are many advantages of working with fuzzy logic because this intelligent technique is widely used in some applications characterized by complex systems (Yan et al. 2019; Ogaji et al. 2005; Dias and Chabu 2008; Das et al. 2016); i.e., the systems that are identified by difficult and ill-defined mathematical equations or by physical phenomena that are difficult to determine. On the other hand, fuzzy logic is based on human experience to establish fuzzy rules and conclusions.
In this paper, we have adopted the fuzzy logic method for several considerations, including the modeling of the induction motor is nonlinear and also its outputs; the input data for fuzzy logic are also nonlinear and have no mathematical model; the fuzzy rules are easy to control, and finally, in this research work, we have used fuzzy logic with only one sensor to diagnose the fault (some of the previous methods use several sensors).
In this article, a method based on fuzzy logic and wavelet packet is proposed in order to remove several problems in the previous methods, and among the most important of the previous problems, we find difficulty analyzing the outputs of induction machine such as current or speed during the non-stationary regime, difficulty diagnosing the fault while the motor is running at variable speeds and loads, difficulty diagnosing the fault at low loads and several methods use many sensors for fault diagnosis (especially for online detection), as the cost of these sensors is very expensive. The main advantage of this method is that only one current sensor is used. The proposed fuzzy method can detect online the fault of broken bars with a variable load (especially at low load), since this proposed method can also determine the number of broken bars whatever the operating mode of the motor (variation in speeds and/or loads). This suggested method is the best tool for diagnosing faults in steady-state, start-up and non-stationary signals.
This proposed method can be extended to the industry 5.0 scenario. Industry 5.0 is designed for smart and precise machines with the benefit of human expertise. This cooperation between humans and machines aims to increase accuracy and speed in production and implementation. We find that Industry 5.0 is very interested in operational intelligence in order to create models to give more accurate and more stable orders. Reference (Maddikunta et al. 2021) talks about Industry 5.0 and explains it in all detail. In this work, we adopted a method based on artificial intelligence and human expertise. The rules were introduced in fuzzy logic to diagnose fault according to human experience in order to have speed in implementation and diagnosis.
In our research paper, we presented a method based on a fuzzy logic technique to diagnose and classify faults in induction motor based on the wavelet packets analysis. This diagnostic procedure was verified by simulation under MATLAB/Simulink environment and practically validated by some experimental tests via the dSPACE card 1104.
2 Signal processing techniques used for diagnosis
2.1 Fourier transform
Mathematically, the Fourier transform (FT) is defined by a scalar product where the signal Xs(f) is given as follows (Oran Brigham 1988):
With: i: unitary pure imaginary, t: time, f: is frequency of Xs(f) and Xs(t): temporal signal.
2.2 Wavelet transform
2.2.1 Discrete wavelet transform
From the original signal (S') and through two complementary filters, high-pass and low-pass, two signals can be extracted: the approximation signal (a) (large-scale part (low-frequency of the signal)) and the detail signal (d) (small-scale part (high-frequency of the signal)), respectively, as indicated in the following Fig. 1 (Bouzida et al. 2011; Cherif et al. 2015):

Breakdown of the signal into approximations and details
Figure 2 illustrates a tree to decompose the signal into two levels (multi-level decomposition (Ameid et al. 2021; Talhaoui et al. 2015)):

Tree of decomposition of a signal into two levels
With fe: sampling frequency.
2.2.2 Decomposition by packet of wavelets
The wavelet packet method is a generalization of the decomposition into discrete wavelets (Bouzida et al. 2011). The decomposition tree in wavelet package is represented by Fig. 3.

Decomposition into a packet of wavelets of order 2
2.2.3 Energy of wavelet decomposition
The energy value of each frequency band is defined by the following relation (Talhaoui et al. 2017; Ameid et al. 2021):
where j is the level of decomposition, n is the decomposition time in wavelets and D is the amplitude at each discrete point of the wavelet coefficient of the signal in the corresponding frequency band.
3 Reduced model of the induction machine taking into account the rotor fault
Figure 4 represents the geometry of the rotor of the asyhncrone machine (Menacer et al. 2006) with Nri: the number of rotor bars, ki = 1,…, Nri, \(i_{{rik_{i} }}\): the mesh current ki,\(i_{{bik_{i} }}\): the bar current, \(i_{{eik_{i} }}\): the current in a portion of ring ki, Rbi: rotor bar resistance, Lbi: leakage inductance of a rotor bar, Rei: ring portion resistance and Lei: short circuit ring leakage inductance.

Equivalent electrical diagram of the rotor
The reduced model of the machine is given as follows (Talhaoui et al. 2014; Ameid et al. 2017):
where: \(\left[ {L_{i} } \right] = \left[ {\begin{array}{*{20}c} {L_{sci} } & 0 & { - \frac{{N_{ri} }}{2}M_{sri} } & 0 & 0 \\ 0 & {L_{sci} } & 0 & { - \frac{{N_{ri} }}{2}M_{sri} } & 0 \\ { - \frac{3}{2}M_{sri} } & 0 & {L_{rci} } & 0 & 0 \\ 0 & { - \frac{3}{2}M_{sri} } & 0 & {L_{rci} } & 0 \\ 0 & 0 & 0 & 0 & {L_{ei} } \\ \end{array} } \right]\,\,\), \(\left[ {R_{i} } \right]\, = \left[ {\begin{array}{*{20}c} {R_{si} } & { - \omega_{i} \,\,L_{sci} } & 0 & {\frac{{N\,_{ri} }}{2}\omega_{i} \,\,M_{sri} } & 0 \\ {\omega_{i} \,\,L_{sci} } & {R_{si} } & { - \frac{{N_{ri} }}{2}\omega_{i} \,\,M_{sri} } & 0 & 0 \\ 0 & 0 & {R_{ri} } & 0 & 0 \\ 0 & 0 & 0 & {R_{ri} } & 0 \\ 0 & 0 & 0 & 0 & {R_{ei} } \\ \end{array} } \right]\,\,\), \(\left[ {i_{i} } \right] = \left[ {\begin{array}{*{20}c} {i\,_{ds} } \\ {i\,_{qs} } \\ {i\,_{dr} } \\ {i\,_{qr} } \\ {i_{ei} } \\ \end{array} } \right]\),\(\left[ {V_{i} } \right] = \left[ {\begin{array}{*{20}c} {V_{ds} } \\ {V_{qs} } \\ 0 \\ 0 \\ 0 \\ \end{array} } \right]\)
With: [ii]: vector of the motor current, [Li]: inductance matrix, [Ri]: resistance matrix, [Vi]: vector of the motor voltage,\(V_{ds}\) and \(V_{qs}\): components d and q of stator voltages, \(i_{ds}\) and \(i_{qs}\): components d and q of stator currents, \(i_{dr}\) and \(i_{qr}\): components d and q of rotor currents,\(\omega_{i}\): electrical angular speed of the rotor, Rsi: stator winding resistance and Rri: resistance of the rotor winding, Lrci: total cyclic inductance and Msri: mutual inductance of the stator/rotor.
The total cyclic inductance and the resistance of the rotor are calculated by
With the electrical angle of two adjacent rotor meshes \(\alpha_{i} = p_{i} \frac{2\pi }{{N_{ri} }}\), pi is the number of pole pairs, Lrpi: specific inductance of the rotor and Mrri: mutual inductance between the non-adjacent meshes of the rotor.
The specific inductance of the rotor loop is as follows:
with Ri: average radius of the air gap, li: active length of the magnetic circuit, e0: thickness of the air gap and μ0: magnetic air permeability.
The mutual inductance between the non-adjacent meshes of the rotor is defined by
The total cyclic inductance of the stator phase is given by the following equation:
with Lsfi represents the rotor leakage inductance.
The magnetizing inductance is as follows:
with Nsi the number of stator turns per phase.
The mutual inductance of the stator/rotor is given by the following equation:
In the event of a rotor fault, the matrix [Ri] must be modified (Ameid et al. 2017). The terms of this matrix are given by Talhaoui et al. (2014), Ameid et al. (2017):
where the index kbi characterizes the broken bar and Rbfki represents the resistance of a broken bar of the rotor.
For the mechanical part, the expression of the electromagnetic torque as a function of the currents is given by
4 Fault identification for the induction motor
Figure 5 illustrates the steps to follow in order to correctly detection and diagnosing faults in the induction machine.

Flowchart of the diagnostic methodology
5 Results with interpretations
5.1 Simulation results
Figure 6 illustrates the evolution of the rotation speed and the current of the stator phase (a) from start up to steady state. The machine is loaded by a nominal load. The simulation parameters of the used machine are presented in the appendix. The increase in amplitudes of the current is very visible between the healthy case and the fault case (Fig. 6a–d).

Machine in loaded operation in the healthy state and faulty of two broken bars (1 and 2); a, b: rotation speed c, d: stator current
We present, in this part, the spectral analysis of the stator current, using the fast Fourier transform (FFT) in steady state at nominal load. Figure 7 shows the frequency spectrum of the stator current. When there is a fault in the machine, we notice the appearance of the lateral lines in the vicinity of the fundamental corresponding approximately to the lines given by the expression: (1 ± 2kLs)f (with kL = 1, 2 …, etc., f: network frequency and s: motor slip), (Fig. 7).

FFT of the stator current in the healthy state and in the faulty state (two broken bars)
5.2 Experimental validation
The experimental tests are carried out on an experimental bench in the LGEB laboratory in Biskra. Figure 8 shows the experimental test bench of the induction machine, which is essentially composed of.
-
1.
Squirrel cage induction motor (1.1 kW);
-
2.
Magnetic powder brake with control unit;
-
3.
Incremental encoder for measuring the position and rotor speed;
-
4.
Current and voltage sensors;
-
5.
Auto-transformer (0–450 V);
-
6.
dSPACE card1104 connected to a computer equipped with control desk software.

Experimental test bench
The bench is designed around two induction machines from the same series, one for testing the healthy state and the other for testing the faulty state. The defect is realized by drilling a small hole of 3.1 mm in diameter at the level of the rotor bar (Fig. 9).

Rotor with two adjacent broken bars of an induction machine
We consider that the star coupled machine is supplied directly by a three-phase source. The machine is coupled to a mechanical load which is a powder brake. The acquisition signals from the incremental speed sensor and Hall effect current sensors are obtained using an interface based on a dSPACE card 1104. The sampling period is 10 kHz.
Figure 10 illustrates the evolution of the rotor speed and of the stator current in the healthy state and with the defect of two broken bars. The fault effect is manifested by ripples on the speed curve. The envelope of the stator current presents very low modulation.

Speed and stator current of the induction machine in the state: a healthy, b with broken of two adjacent bars
Figure 11 presents the results of analysis by FFT of the stator current in steady state of the healthy machine and with the failure of breakage of two adjacent bars. The analysis of the stator current shows the presence of components having a direct relation to the defect, which is linked to following equation (1 ± 2kLs)f. The presence of fault lines in the spectra from simulation and experimentation shows the validity of the used fault model.

FFT of the stator current in the healthy state and in the faulty state (two broken bars)
The diagnosis of the induction machine fault based on the analysis by FFT sometimes finds difficulties. So we suggest another method based on WT. From relation 12, we can calculate the number of decomposition levels necessary to obtain an approximation signal and the details (DWT) [9, 23 and 48].
So for a sampling frequency of fe = 10 kHz, the supply frequency f = 50 Hz, the decomposition number is equal to 9.
The wavelet packet method is a more accurate method than discrete wavelet decomposition. Through FFT method, note that, we just need the frequency range (0–156.25 Hz), because the fault frequencies appear next to the fundamental frequency (Table 3).
Figure 12 shows the analysis of stator current by the decomposition into a wavelet packet from start-up to steady-state for an operation of the motor in the healthy state and with fault. By comparing the signals obtained for machines with faults (Fig. 12b), the amplitude of the coefficients (9.4) (band [39.06–48.81 Hz]) and (9.5) (band [48.8–58.59 Hz]) known increases compared to the healthy machine (Fig. 12a).

Decomposition into wavelet packet of the stator current db40 a healthy motor b motor with two broken bars
5.3 Application of fuzzy logic
By calculating the energy associated with each level or each decomposition node, we can build a very effective diagnostic tool. In Fig. 13, we notice a difference in the value of the energy stored in the bands [(9, 0)–(9, 5)] across the frequencies obtained by decomposing into wavelet packets, where the number of breaks is related to the value of the energy.

Energy variation in (9, 0) to (9, 5)
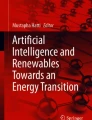
Figure 14 illustrates the energy stored in levels (9, 4) and (9, 5) as a function of the number of broken bars for a nominal load. Through these results, we can see that the energy stored in the levels (9, 4) and (9, 5) is of high value, and we can see that there is a difference in value when the number of broken bars is greater.

Change of the energy stored in levels (9, 4) and (9, 5) according to the broken bars
Figure 15 shows the increase in the amplitude of the bands (9.4) and (9.5) as a function of the load variation. From Fig. 15, we can conclude that the load plays an important role in fault diagnosis, so it must be taken into account.

Behavior of the energy stored in levels (9, 4) and (9, 5) according to varying the load
Through the previous results, we can consider that the levels (9, 4) and (9, 5) are effective indicators for diagnosing the error. The proposed type in this system (FIS) is Mamdani under MATLAB. The energy value at levels (9, 4) and (9, 5) can be used as input variables in the diagnostic system.
Figures 16 and 17 show the input variables and the output variables, where the triangular and trapezoidal membership functions were used for these variables.

Membership functions of the inputs (9, 4) and (9, 5)

Output membership functions
Concerning the linguistic values of the input variables, they are determined as follows: very small (VS), small (S), medium (M), big (B) and very big (VB). Figure 17 shows the linguistic output variables, as they were divided as follows: healthy (0bb), one bar (1bb) and two broken bars (2bb).
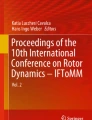
Figure 18 shows the fuzzy output as a function of the input variables.

Fuzzy output based on the input variables
Table 4 shows the relationship between the fuzzy logic output and the machine state. The range used for the latter is [0 1]. This range is divided into three sections: healthy, break of one bar and break of two bars.
Figure 19 shows some of the tests we performed to validate the performance of this intelligent system. Also, Table 5 shows a number of the results extracted from the intelligent fuzzy logic classifier, where we have entered samples to verify this system. It appears that the relationship between the inputs and outputs of this fuzzy system is always preserved. For the fuzzy classifier diagnosis system, the time was good, although there were some complications. In our research work, we have found that the high used number of fuzzy rules causes significant computation and interaction time. Despite this complication, the calculation time remains rather small.

Validation tests
After these results, we conclude and consider this method a very good technique for detecting the fault and the number of broken bars with a variable load in the induction machine. Table 6 presents a comparison between the proposed method and the previously used methods.
6 Conclusion
In this paper, we have suggested an intelligent fault diagnosis mechanism to identify and diagnose the fault in the induction machine. The fuzzy logic technique is used as a fault detector in an induction machine. The fault considered is the breakage of the rotor bars in an inductions machine. The analysis of the results in experimentation shows that the fault diagnosis in transient regime by the wavelet packet gives good detection results. The results obtained show that the calculation of energy for each level of decomposition can be a very effective diagnostic tool. The energies E (9, 4) and E (9, 5) have been defined as input variables in the diagnostic system. The finality of the results proved the effectiveness of the application of techniques based on fuzzy logic and on the wavelet packet for the automatic detection and diagnosis of the presence of any fault in the breaking of rotor bars of induction machine. The fuzzy logic approach is considered one of the most successful methods for diagnosing faults. Despite that, it remains, like other methods, with some concerns that can be remedied in the future, including lack of human expertise, especially in setting rules and you need a powerful calculator, especially in the presence of many rules used in fuzzy logic.
Data Availability
Enquiries about data availability should be directed to the authors.
References
Abd-el Malek M, Abdelsalam AK, Hassan OE (2017) Induction motor broken rotor bar fault location detection through envelope analysis of start-up current using Hilbert transform. Mech Syst Signal Process 93:332–350. https://doi.org/10.1016/j.ymssp.2017.02.014
Al-ali A, Elharrouss O, Qidwai U, Al-Maaddeed S (2021) ANFIS-Net for automatic detection of COVID-19. Sci Rep 11:1–13. https://doi.org/10.1038/s41598-021-96601-3
Ali MZ, Shabbir MNSK, Liang X, Zhang Y, Hu T (2019) Machine learning based fault diagnosis for single- and multi-faults in induction motors using measured stator currents and vibration signals. IEEE Trans Ind Appl 55:2378–2391. https://doi.org/10.1109/TIA.2019.2895797
Ameid T, Menacer A, Talhaoui H, Harzelli I (2017) Rotor resistance estimation using Extended Kalman filter and spectral analysis for rotor bar fault diagnosis of sensorless vector control induction motor. Measurement 111:243–259. https://doi.org/10.1016/j.measurement.2017.07.039
Ameid T, Menacer A, Talhaoui H, Azzoug Y (2018) Discrete wavelet transform and energy eigen value for rotor bars fault detection in variable speed field-oriented control of induction motor drive. ISA Trans 79:217–231. https://doi.org/10.1016/j.isatra.2018.04.019
Ameid T, Talhaoui H, Azzoug Y, Chebaani M, Laidoudi A (2021) Rotor fault detection using hybrid signal processing approach for sensorless backstepping control driven induction motor at low-speed operation. Int Trans Elect Energy Syst 31:1–26. https://doi.org/10.1002/2050-7038.13150
Bazan GH, Scalassara PR, Endo W, Goedtel A, Godoy WF, Palácios RHC (2017) Stator fault analysis of three-phase induction motors using information measures and artificial neural networks. Elect Power Syst Res 143:347–356. https://doi.org/10.1016/j.epsr.2016.09.031
Bessam B, Menacer A, Boumehraz M, Cherif H (2016) Detection of broken rotor bar faults in induction motor at low load using neural network. ISA Trans 64:241–246. https://doi.org/10.1016/j.isatra.2016.06.004
Bouzida A, Touhami O, Ibtiouen R, Belouchrani A, Fadel M, Rezzoug A (2011) Fault diagnosis in industrial induction machines through discrete wavelet transform. IEEE Trans Ind Elect 58:4385–4395. https://doi.org/10.1109/TIE.2010.2095391
Burriel-Valencia J, Puche-Panadero R, Martinez-Roman J, Sapena-Bano A, Pineda-Sanchez M (2017) Short frequency fourier transform for fault diagnosis of induction machines working in transient regime. IEEE Trans Instrum Measur 66:432–440. https://doi.org/10.1109/TIM.2016.2647458
Burriel-Valencia J, Puche-Panadero R, Martinez-Roman J, Sapena-Bano M, Pineda-Sanchez A, Perez-Cruz J, Riera-Guasp M (2019) Automatic fault diagnostic system for induction motors under transient regime optimized with expert systems. Electronics 8:1–16. https://doi.org/10.3390/electronics8010006
Chahine K (2018) Rotor fault diagnosis in induction motors by the matrix pencil method and support vector machine. Int Trans Elect Energy Syst 28:1–13. https://doi.org/10.1002/etep.2612
Cherif H, Menacer A, Bessam B, Kechida R (2015) Stator inter turns fault detection using discrete wavelet transform. In: International symposium on diagnostics for electrical machines, power electronics and drives (SDEMPED). IEEE, Guarda, Portugal. doi:https://doi.org/10.1109/DEMPED.2015.7303681
Chouai A, Cabassud M, Lann MVL, Gourdon C, Casamatta G (2000) Use of neural networks for liquid-liquid extraction column modeling: an experimental study. Chem Eng Process 39:171–180. https://doi.org/10.1016/S0255-2701(99)00086-0
Das S, Guha D, Dutta B (2016) Medical diagnosis with the aid of using fuzzy logic and intuitionistic fuzzy logic. Appl Intell 45:850–867. https://doi.org/10.1007/s10489-016-0792-0
De Santiago-Perez JJ, Rivera-Guillen JR, Amezquita-Sanchez JP, Valtierra-Rodriguez M, Romero-Troncoso RJ, Dominguez-Gonzalez A (2018) Fourier transform and image processing for automatic detection of broken rotor bars in induction motors. Measur Sci Technol 29:1–29. https://doi.org/10.1088/1361-6501/aad3aa
Dias CG, Chabu LE (2008) A fuzzy logic approach for the detection of broken rotor bars in squirrel cage induction motors. In: International Conference on Fuzzy Systems. IEEE, Hong Kong, China. doi:https://doi.org/10.1109/FUZZY.2008.4630642
Harzelli I, Menacer A, Ameid T (2020) A fault monitoring approach using model-based and neural network techniques applied to input–output feedback linearization control induction motor. J Ambi Intell Hum Comput 11:2519–2538. https://doi.org/10.1007/s12652-019-01307-0
Hassan OE, Amer M, Abdelsalam AK, Williams BW (2018) Induction motor broken rotor bar fault detection techniques based on fault signature analysis: a review. IET Elect Power Appl 12:895–907. https://doi.org/10.1049/iet-epa.2018.0054
Hassanzadeh M, Faiz J, Kiyoumarsi A (2018) A new analytical technique for analysis and detection of air-gap eccentricity fault in surface-mounted permanent-magnet. Int Trans Elect Energy Syst 29:1–25. https://doi.org/10.1002/etep.2764
Hong GKM, Hussain MA, Wahab AKA (2021) Fuzzy logic controller implementation on a microbial electrolysis cell for biohydrogen production and storage. Chin J Chem Eng 40:149–159. https://doi.org/10.1016/j.cjche.2021.03.057
Jayalakshmi M, Garg L, Maharajan K, Jayakumar K, Srinivasan K, Bashir AK, Ramesh K (2021) Fuzzy logic-based health monitoring system for covid’19 patients. Comput Mater Continua 67:2431–2447. https://doi.org/10.32604/cmc.2021.015352
Kechida R, Menacer A, Talhaoui H (2013) Approach signal for rotor fault detection in induction motors. J Fail Anal Prevent 13:346–352. https://doi.org/10.1007/s11668-013-9681-6
Kia SH, Henao H, Capolino GA (2009) Diagnosis of broken-bar fault in induction machines using discrete wavelet transform without slip estimation. IEEE Trans Ind Appl 45:1395–1404. https://doi.org/10.1109/TIA.2009.2018975
Li T, Li Y, Chen X (2021) Fault diagnosis with wavelet packet transform and principal component analysis for multi-terminal hybrid HVDC network. J Mod Power Syst Clean Energy 9:1312–1326. https://doi.org/10.35833/MPCE.2021.000362
Lyridis DV (2021) An improved ant colony optimization algorithm for unmanned surface vehicle local path planning with multi-modality constraints. Ocean Eng 241:1–7. https://doi.org/10.1016/j.oceaneng.2021.109890
Ma B, Wang Y (2021) Adaptive type-2 fuzzy sliding mode control of steer-by-wire systems with event-triggered communication. Proc Instit Mech Eng D J Automob Eng 235:2442–2455. https://doi.org/10.1177/0954407021995390
Maddikunta PKR, Pham QV, Prabadevi B, Deepa N, Dev K, Gadekallu TR, Ruby R, Liyanage M (2021) Industry 5.0: a survey on enabling technologies and potential applications. J Ind Inform Integr. https://doi.org/10.1016/j.jii.2021.100257
Martin-Diaz I, Morinigo-Sotelo D, Duque-Perez O, Romero Troncoso RJ (2018) An experimental comparative evaluation of machine learning techniques for motor fault diagnosis under various operating conditions. IEEE Trans Ind Appl 54:2215–2224. https://doi.org/10.1109/TIA.2018.2801863
Martinez J, Belahcen A, Muetze A (2017) Analysis of the vibration magnitude of an induction motor with different numbers of broken bars. IEEE Trans Ind Appl 53:2711–2720. https://doi.org/10.1109/TIA.2017.2657478
Menacer A, Moreau S, Benakcha A, Nait Said MS (2006) Effect of the position and the number of broken bars on asynchronous motor stator current spectrum. In: Proceedings of the 12th international power electronics and motion control conference, IEEE, Portoroz, Slovenia. DOI: https://doi.org/10.1109/EPEPEMC.2006.4778526
Moosavi SS, Esmaili Q, Djerdir A, Ait AY (2017) Inter-Turn fault detection in stator winding of PMSM using wavelet transform. In: Vehicle power and propulsion conference (VPPC), IEEE. Belfort, France. doi:https://doi.org/10.1109/VPPC.2017.8330891
Naveena GJ, Basawaraj H, Surya N (2015) Fault diagnosis of VSI fed induction motor drive using fuzzy logic approach. Int J Sci Technol Manag 4:115–126. https://doi.org/10.1109/ICPACE.2015.7274965
Nemec M, Ambrožic V, Fišer R, Nedeljkovic D, Drobni K (2019) Induction motor broken rotor bar detection based on rotor flux angle monitoring. Energies 12:1–17. https://doi.org/10.3390/en12050794
Ogaji SOT, Marinai L, Sampath S, Singh R, Prober SD (2005) Gas-turbine fault diagnostics: a fuzzy-logic approach. Appl Energy 82:81–89. https://doi.org/10.1016/j.apenergy.2004.07.004
Oran Brigham E (1988) Fast Fourier transform and its applications. Prentice-Hall Signal Processing Series.
Razavi-Far R, Farajzadeh-Zanjani M, Saif M (2017) An integrated class-imbalanced learning scheme for diagnosing bearing defects ininduction motors. IEEE Trans Ind Inform 13:2758–2769. https://doi.org/10.1109/TII.2017.2755064
Razik H, De Rossiter Corrêa MB, Da Silva ERC (2009) A Novel monitoring of load level and broken bar fault severity applied to squirrel-cage induction motors using a genetic algorithm. IEEE Trans Ind Elect 56:4615–4626. https://doi.org/10.1109/TIE.2009.2029580
Reddy GT, Reddy MPK, Lakshmanna K, Rajput DS, Kaluri R, Srivastava G (2020) Hybrid genetic algorithm and a fuzzy logic classifier for heart disease diagnosis. Evolut Intell 13:185–196. https://doi.org/10.1007/s12065-019-00327-1
Ruiming F, Hongzhong M (2006) Application of MCSA and SVM to induction machine rotor fault diagnosis. In: Proceedings of the 6th world congress on intelligent control and automation, IEEE. Dalian, China. doi:https://doi.org/10.1109/WCICA.2006.1714134
Saghafinia A, Kahourzade S, Mahmoudi A, Hew WP, Uddin MN (2012) On line trained fuzzy logic and adaptive continuous wavelet transform based high precision fault detection of IM with broken rotor bars. In: IEEE Industry Applications Society Annual Meeting, IEEE, Las Vegas, NV, USA. doi:https://doi.org/10.1109/IAS.2012.6374027
Sapena-Bano A, Burriel-Valencia J, Pineda-Sanchez M, Puche-Panadero R, Riera-Guasp M (2017) The harmonic order tracking analysis method for the fault diagnosis in induction motors under time-varying conditions. IEEE Trans Energy Conver 32:244–256. https://doi.org/10.1109/TEC.2016.2626008
Sun C, Ma M, Zhao Z, Chen X (2018) Sparse deep stacking network for fault diagnosis of motor. IEEE Trans Ind Inform 14:3261–3270. https://doi.org/10.1109/TII.2018.2819674
Talhaoui H, Menacer A, Kessal A, Kechida R (2014) Fast Fourier and discrete wavelet transforms applied to sensorless vector control induction motor for rotor bar faults diagnosis. ISA Trans 53:1639–1649. https://doi.org/10.1016/j.isatra.2014.06.003
Talhaoui H, Menacer A, Kessal A, Ameid T (2017) Experimental diagnosis of broken rotor bars fault in induction machine based on Hilbert and discrete wavelet transforms. Int J Adv Manuf Technol 95:1399–1408. https://doi.org/10.1007/s00170-017-1309-7
Talhaoui H, Kessal AT, A, (2021) Energy eigenvalues and neural network analysis for broken bars fault diagnosis in induction machine under variable load: experimental study. J Ambient Intell Hum Comput. https://doi.org/10.1007/s12652-021-03172-2
Talhaoui H, Menacer A, Kechida R (2015) Mixed eccentricity fault diagnosis in the sensorless field oriented control induction motor using DWT technique. In: International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), IEEE, Guarda, Portugal. doi:https://doi.org/10.1109/DEMPED.2015.7303675
Veeramanikandan P, Selvaperumal S (2021) Investigation of different MPPT techniques based on fuzzy logic controller for multilevel DC link inverter to solve the partial shading. Soft Comput 25:3143–3154. https://doi.org/10.1007/s00500-020-05370-0
Vinoth K, Achenkunju A, Mathew J (2018) A Investigation of fast Fourier transform and wavelet transform approach in electrical machines. Int J Pure Appl Math 118:21–27. https://doi.org/10.12732/ijpam.v118i11.4
Yahia K, Cardoso AJM, Ghoggal A, Zouzou SE (2014) Induction motors air gap-eccentricity detection through the discrete Wavelet transform of the apparent power signal under non-stationary operating conditions. ISA Trans 53:603–611. https://doi.org/10.1016/j.isatra.2013.12.002
Yan H, Xu Y, Cai F, Zhang H, Zhao W, Gerada C (2019) PWM-VSI fault diagnosis for a PMSM drive based on the Fuzzy logic approach. IEEE Trans Power Elect 34:759–768. https://doi.org/10.1109/TPEL.2018.2814615
Zadeh LA (1965) Fuzzy sets. Inform. Control 8:338–353. https://doi.org/10.1016/S0019-9958(65)90241-X
Zawad MA, Liang X (2019) Induction motor fault diagnosis using discrete wavelet transform. In: Canadian Conference of Electrical and Computer Engineering (CCECE), IEEE, Edmonton, AB, Canada. doi:https://doi.org/10.1109/CCECE.2019.8861923
Zhang J, Zhu N, Yang L, Yao Q, Lu Q (2007) A fault diagnosis approach for broken rotor bars based on EMD and envelope analysis. J China Univ Min Technol 17:205–209. https://doi.org/10.1016/S1006-1266(07)60073-X
Funding
The authors did not receive support from any organization for the submitted work.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
Ethical approval
The ethical approval has been respected.
Informed consent
Not applicable, because this article does not contain any studies with human or animal subjects.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendices
1.1 Appendix A: Parameters of the induction motor used in simulation
P ni | Rated power | 1.1 kW |
|---|---|---|
V i | Nominal line voltage | 220 V |
I i | Rated stator current | 4.6 A |
f | Supply frequency | 50 Hz |
p i | Number of pole pairs | 1 |
R i | Average diameter at the air gap | 35.76 mm |
l i | Rotor length | 65 mm |
e 0 | Air-gap diameter | 0.2 mm |
N ri | Number of rotor bars | 16 |
N si | Number of turns per phase | 160 |
R si | Stator phase resistance | 7.58 Ω |
R bi | Rotor bar resistance | 150 μΩ |
R ei | Ring portion resistance | 150 μΩ |
L ei | Short circuit ring leakage inductance | 0.1 μH |
L bi | Leakage inductance of a rotor bar | 0.1 μH |
L sfi | Stator leakage inductance | 26.5 mH |
J i | Inertia moment | 5.4 10–3 kgm2 |
1.2 Appendix B: Parameters of the induction motor used in experimentation
P ni | Rated power | 1.1 kW |
|---|---|---|
V i | Nominal line voltage | 400/230 V |
I i | Rated stator current | 2.5/4.3 A |
f | Supply frequency | 50 Hz |
p i | Number of pole pairs | 2 |
N ri | Number of rotor bars | 46 |
F i | Damping coefficient | 0.0029 N m/rad/s |
J i | Inertia moment | 0.0124 kgm2 |
Rights and permissions
About this article

Cite this article
Talhaoui, H., Ameid, T., Aissa, O. et al. Wavelet packet and fuzzy logic theory for automatic fault detection in induction motor. Soft Comput 26, 11935–11949 (2022). https://doi.org/10.1007/s00500-022-07028-5
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-022-07028-5