
Abstract
We consider the Voronoi diagram of points in the real plane when the distance between two points a and b is given by \(L_p(a-b)\) where \(L_p((x,y)) = (|x|^p+|y|^p)^{1/p}.\) We prove that the Voronoi diagram has a limit as p converges to zero from above or from below: it is the diagram that corresponds to the distance function \(L_*((x,y)) = |xy|\). In this diagram, the bisector of two points in general position consists of a line and two branches of a hyperbola that split the plane into three faces per point. We propose to name \(L_*\) as defined above the geometric \(L_0\) distance.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The \(L_p\) distance between two points a and b is given by \(L_p(a-b)\) where
The \(L_p\) distances are widely known and used in computational geometry and applications; see Okabe, Boots, Sugihara and Chiu [5] or Klein, Driemel and Haverkort [4]. In this paper we analyse what happens as p tends to zero. We see immediately that the values of the \(L_p\) distance function in (1) differ depending on whether p tends to zero from above or from below: If \(x \ne 0\) and \(y \ne 0\), then \(\lim _{p \downarrow 0} L_p((x,y)) = \infty \) whereas \(\lim _{p \uparrow 0} L_p((x,y)) = 0\). Nevertheless, in this paper, we find that, at least for points in general position, the limit of the Voronoi diagram under the \(L_p\) distance as p approaches zero is well-defined. In other words, even though, for small values of |p|, the \(L_p\) and \(L_{-p}\) distances have very different values, they induce almost identical Voronoi diagrams.
To be precise, observe that the terms \(|x|^p\) and \(|y|^p\) in (1) are undefined if \(p < 0\) and \(x=0\) or \(y=0\), respectively. We extend the function \(L_p\), for \(p<0\), to a continuous function on all arguments (x, y) by setting its value to zero if x or y is equal to zero. Thus, given two points a and b in the plane, we can calculate and compare their \(L_p\) distances to any other point in the plane, for any \(p \ne 0\).
Figure 1 shows an example of the Voronoi diagram of two points under the \(L_p\) distance for two values of p very close to zero. The diagrams have been created with Vorosketch developed by the first author [3]. The figure shows, in particular, the bisector \(B_p(a,b)\) of two points \(a = (a_x,a_y)\) and \(b = (b_x,b_y)\), that is, it shows the set of points in the plane that are equidistant to a and b under the \(L_p\) distance. The bisector \(B_p(a,b)\) separates the set \(V_p(a,b)\) of points that are closer to a from the set \(V_p(b,a)\) of points that are closer to b. In this paper we prove the following result.

A bisector (in black) of two points under the \(L_p\) distance for \(p = -0.05\) (left) and \(p = 0.05\) (right), as computed pixelwise by Vorosketch [3]. The bisector divides the plane into two regions (points closer to a and points closer to b) that each seem to consist of three faces
Theorem 1
Let a and b be two point sites in the real plane with different X- and Y-coordinates. Then their bisector \(B_p(a,b)\) and the sets \(V_p(a,b)\) and \(V_p(b,a)\) under the \(L_p\) distance converge, as p tends to zero from above or from below, to their bisector \(B_*(a,b)\) and the sets \(V_*(a,b)\) and \(V_*(b,a)\) under the \(L_*\) distance as defined by:
Note that \(L_*(a-b)\) is simply the area of the axis-parallel bounding box of a and b. Distance measure \(L_*\) and the associated Voronoi diagrams have been used by Chazelle et al. [2] to compute largest empty rectangles. In Aurenhammer et al. [1] the \(L_*\) distance appears as a special case of k-dimensional quadratic form distances
defined for non-singular \(k \times k\) matrices M. When \(k=2\) and M is the unit matrix with its rows swapped, then \(L_*(b-a)\) is obtained by \(\frac{1}{2} |d_Q(a,b)|\).
Now let \(\lambda \) and \(\rho \) denote the other two vertices of the axis-parallel bounding box of a and b.

a A bisector of two points a and b in \(L_*\). b A bisector of two points on a horizontal line in \(L_p\), where \(p > 0\). c A bisector of two points on a horizontal line in \(L_p\), where \(p < 0\): note that the line through a and b does not lie on the common boundary of the regions \(V_p(a,b)\) and \(V_p(b,a)\), but it is part of the bisector \(B_p(a,b)\) nonetheless, as all points on the line through a and b have distance 0 to both a and b
The bisector \(B_*(a,b)\) consists of the line through \(\lambda \) and \(\rho \) and of two hyperbola branches through \(\lambda \) and \(\rho \), respectively, whose asymptotes are the vertical and horizontal lines through the bounding box’s centre; see Fig. 2a. This can easily be verified by solving the equation \(L_*(a-q) = L_*(b-q)\) for q in each of the nine regions that result from subdividing the plane by the axis-parallel lines through a and b: in the odd-numbered regions, the solution is the line with equation:
whereas in the even-numbered regions, the solution is the hyperbola with equation:
The bisector \(B_*(a,b)\) divides the plane into six faces, such that each face is entirely contained in either \(V_*(a,b)\) or \(V_*(b,a)\), the face containing a lies in \(V_*(a,b)\), the face containing b lies in \(V_*(b,a)\), and each point of \(B_*(a,b)\) lies on the boundary of both \(V_*(a,b)\) and \(V_*(b,a)\).
It follows that for point sites in general position (that is, if no two points are on a common horizontal or vertical line), the limit of their \(L_p\) Voronoi diagram as p tends to zero is well-defined and it equals the \(L_*\) Voronoi diagram. Thus, it appears that defining \(L_0((x,y))\) as \(L_*((x,y)) = |xy|\), which equals \(\exp (\ln |x| + \ln |y|)\) if \(x, y \ne 0\), constitutes a natural interpretation of \(L_p((x,y)) = (|x|^p + |y|^p)^{1/p}\) for \(p = 0\). Therefore we propose to call the \(L_*\) distance measure the geometric \(L_0\)distance, and the resulting Voronoi diagram the geometric \(L_0\)Voronoi diagram, distinguishing it from other, and unrelated, definitions of \(L_0\) [7]. Figure 3 shows an example of an \(L_0\) Voronoi diagram for eight points in the plane.
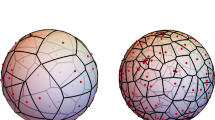
Figure 4 shows, for comparison, the \(L_p\) Voronoi diagram of the same sites for several values of p. For n points in general position, the complexity of the \(L_0\) Voronoi diagram is in \(\Omega (n^2)\), as Seidel has observed.Footnote 1 In fact, Definition 2 implies that all points on the vertical and horizontal lines through a point site a are at \(L_0\) distance 0 to a. Now let us place n sites \(a_i\) in general position and consider the intersection point \(a_{ij}\) of the horizontal line through \(a_i\) and the vertical line through \(a_j\), where \(i \ne j\). As we move to the left or to the right, starting from \(a_{ij}\), on the horizontal line through \(a_i\), we enter a region in which the \(L_0\) distance to \(a_i\) is 0 whereas the \(L_0\) distance to \(a_k\), for any \(k \ne i\), is non-zero. Thus, we enter the Voronoi region of \(a_i\). Similarly, if we move up or down from \(a_{ij}\) on the vertical line through \(a_j\), we enter the Voronoi region of \(a_j\). Thus, \(a_{ij}\) is a vertex of the Voronoi diagram where the boundaries of the Voronoi regions of \(a_i\) and \(a_j\) intersect. As there are \(\Theta (n^2)\) such vertices \(a_{ij}\) in our construction, the complexity of the Voronoi diagram is in \(\Omega (n^2)\).

An \(L_0\) Voronoi diagram as computed pixelwise by Vorosketch [3]

Voronoi Diagrams under the \(L_p\) distance for various values of p, as rendered pixel by pixel by Vorosketch [3]. Note that features narrower than a pixel might not have been detected completely, so the combinatorial structure of the bisectors should be interpreted with care
Note that \(L_*(q) = \frac{1}{2} (L_1^2(q) - L_2^2(q))\), so the geometric \(L_0\) distance measures, in a way, the difference between the \(L_1\) and the \(L_2\) distance. Also, \(\ln (L_*((x,y)))= \ln |x| + \ln |y|\) could, perhaps, be considered the proper distance measure in Manhattan if cabs were accelerating exponentially fast.
If a and b lie on a common vertical or horizontal line, then \(B_p(a,b)\) is discontinuous at \(p = 0\), as \(\lim _{p\downarrow 0} B_p(a,b)\) is the line perpendicular to and through the midpoint of the segment ab, whereas \(\lim _{p\uparrow 0} B_p(a,b) = B_*(a,b) \) consists of both axis-parallel lines through the midpoint of ab (see Fig. 2c).
The proof of Theorem 1 is based on Lemma 1 in Sect. 2, which tells us in which parts of the plane \(L_p\) bisectors appear, and on Lemma 2 in Sect. 3, which states that these \(L_p\) bisector points converge to a line and a hyperbola.
While this paper was under revision for this journal, Kevin Buchin has brought to our attention a discussion at the Mathematics Stack Exchange [6], where a proof is sketched showing that \(((|x|^p + |y|^p)/2)^{1/p}\) converges to |xy| as p runs to zero. However, Voronoi diagrams are not being considered there.
2 \(L_p\) Circles
First we want to show how a bisector structure as shown in Fig. 1 can come about. Metrical bisectors are written out by intersection points of expanding \(L_p\) circles, so we take a look at those.
For each \(p > 0\) and each radius \(r > 0\), the \(L_p\) circle of radius r centred at the origin has corner points \((0,\pm r)\) and \((\pm r, 0)\), since \(L_p(0, \pm r) = (|0|^p + |r|^p)^{1/p} = r\) and \(L_p(\pm r, 0) = (|r|^p + |0|^p)^{1/p} = r\).
As p decreases from 2 to 1, the round Euclidean \(L_2\) circle gets flattened into a diagonal square that is just convex. As p becomes smaller than 1, the circle’s segments between the cornerpoints bend inwards; since convexity is lost, the triangle inequality no longer holds.

Two \(L_{0.58}\) circles emanating from centres a and b

Bisector point B moves to the right as \(p>0\) shrinks
Figure 5 shows two \(L_{0.58}\) circles emanating from centres a and b. At radius \(r=3.689\) they meet for the first time, creating two bisector points on the top and bottom edges of the bounding box of a, b. Let us focus on the bisector point B on the bottom edge of the bounding box. As p shrinks to 0.43, point B moves to the right along the bottom edge of the bounding box, as Fig. 6 shows. Only in the limit, as \(p\rightarrow 0\), will B reach the rightmost endpoint of the bottom edge, denoted by \(\rho \) in Fig. 12.

Two \(L_{0.43}\) circles expanding further\(\ldots \)

\(\ldots \)while their intersections are writing out bisector segments
If we fix \(p=0.43\) as in Fig. 6 and increase radius r we can see in Figs. 7 and 8 how bisector point B moves to the left and downwards. In fact, B and the other intersection points of the \(L_p\) circles are writing out segments of \(B_p(a,b)\) that will get closer to the curves shown in Fig. 2a the smaller p becomes.
In the limit, the \(L_p\) unit circle, for \(p>0\), converges to the cross that consists of the four cornerpoints and the two line segments connecting the horizontal and vertical pairs.
For \(p<0\), the \(L_p\) circles of radius r centred at the origin are disconnected. They consist of four connected segments that have asymptotes a distance r away from, and parallel to, the coordinate axes. Indeed, to fulfil a circle’s equation
neither x nor y can be zero because \(0^p\) is undefined if \(p<0\). Therefore,we must have \(|x| > r\); otherwise, that is, if \(|x| \le r\), we would have \(|x|^p \ge r^p\) (since the function \(f(z)=z^p\) is decreasing for \(p<0\) and \(z>0\)) and we would obtain the contradiction \(r^p = |x|^p+|y|^p > |x|^p \ge r^p\). If we fix r and let p grow to zero from below, the circle’s segments strive to infinity along their asymptotes, so that no limits of these circles exist in the plane.
Yet the intersections of \(L_p\) circles for negative p define bisector curves that look quite similar to those for \(p>0\); see Figs. 9 and 10. Also, the analysis of the bisector curves for positive and negative values of p in Sect. 3 will turn out to be almost identical.

Two \(L_{-0.55}\) circles centred at a and b

Bisectors look similar to the case \(p>0\)
It is quite interesting to study the intersection patterns of expanding \(L_p\) circles by means of an interactive tool like GeoGebra.Footnote 2 It leads to the following observation, whose proof will be given in Sect. 3.4, after introducing necessary notations.

The cells in the plane where segments of \(B_p(a,b)\) appear. Notations H and S denote cells that contain hyperbola and straight line segments, respectively. Also shown are the functions \(v_p(x)\) and \(w_p(y)\) for the various columns and rows of the grid
Lemma 1
If x lies in the open X-interval of a cell C coloured grey in Fig. 11 then, for each p close enough to zero, there exists \(y_p\) in the open Y-interval of C such that \((x,y_p)\) belongs to \(B_p( a,b)\). White cells do not contain points of any \(B_p( a,b)\).
The reason for restricting ourselves to open intervals are the asymptotes involved, and also the fact that points like the lower right corner of the bounding box of a, b in Figs. 5 and 6 are not situated on any \(B_p(a,b)\) with \(p > 0\); only in the \(L_0\) diagram and in the \(L_p\) diagrams for \(p < 0\) does this point appear as a Voronoi vertex. Bisector points on the vertical lines at \(x \in \{-u, 0, u\}\) and on the horizontal lines at \(y \in \{-1, 0, 1\}\) will be addressed after the proof of Lemma 1.
3 Analysis
3.1 Framework
Throughout this section we will assume that \(|p|<1\) is sufficiently small, but not zero.

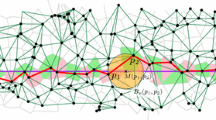
A bisector of two points a, b in the \(L_0\) diagram. Their Voronoi regions look as indicated in Fig. 1. The number h(x) denotes the Y-coordinate of the point marked
We consider two point sites a and b that do not lie on a common horizontal or vertical line. If we subject these points to translation, reflection in a coordinate axis, or reflection in the line \(y = x\), the bisector under the \(L_p\) distance is subject to the same transformation. Therefore, to investigate the shape of the bisector, it suffices to consider two point sites \(a=(-u, -1)\) and \(b=(u, 1)\) where \(u \ge 1\). Note that under these conditions, Equations 3 and 4 of the linear and the hyperbolic sections of the \(L_*\) bisector \(B_*(a,b)\) simplify to \(y = -x/u\) and \(y = -u/x\), respectively.
In this subsection, we set up the general framework to analyse the shape of the bisector in all grey cells of Fig. 11. In the next subsections, we analyse the H-cells and the S-cells, respectively.
The \(L_p\) bisector \(B_p(a,b)\) of a and b is the locus of all points (x, y) in the plane satisfying
Lemma 2
Let \((x,y_p)_p\), where p tends to zero, be a sequence of points of \(B_p(a,b)\) in one of the cells coloured grey in Fig. 11. Let h be the hyperbola \(h(x) = -u/x\), and let s be the line \(s(x) = -x/u\). Then \(\lim _{p\rightarrow 0} y_p = h(x)\) holds in cells of type H, and \(\lim _{p\rightarrow 0} y_p = s(x)\) in cells of type S.
Let us define
Then the bisector \(B_p(a,b)\) is given by \(w_p(y) = v_p(x)\), because of (5).
How are these equations related to the hyperbola h and the line s? A connection is provided by the following functional properties.
Lemma 3
For all p, we have
Proof
We have
\(\square \)
Lemma 3 has a useful consequence.
Lemma 4
Let \(b=(x,y_p)\) be a bisector point of \(B_p(a,b)\). Then,
The idea of our proof for Lemma 2 is as follows. We use Lemma 4 to provide an upper bound to the error we incur in bisector (5) if we replace the true value \(y_p\) by the approximate value h(x) or s(x). Then, we apply the mean value theorem to the function \(w_p(y)\), which is continuous and everywhere differentiable except at \(y=\pm 1\), to upper-bound \(|y_p - h(x)|\), or \(|y_p -s(x)|\), by said error. This leads to the following estimates.
Lemma 5
Define \( z_p(y):= \frac{1}{p} \frac{d}{dy}w_p(y)\). If \(\{y_p, h(x)\}\) or \(\{y_p, s(x)\}\) are both situated in the same Y-interval \((-\infty , -1), (-1,1)\), or \((1, \infty )\), and \(x \not =0\), then:
where o(1) denotes a function f of x and p such that for all \(x \ne 0\), we have \(\lim _{p\rightarrow 0} f(x,p) = 0\).
Proof
By the mean value theorem, there exists \(y^{*}\) between \(y_p\) and h(x) such that
by Lemma 4. In
both numerator and denominator converge to zero as p tends to zero. By L’Hospital’s rule, the limit of this fraction equals the limit of the fraction of the derivatives with respect to p. While the denominator has derivative 1, the numerator’s derivative is
which goes to \(\ln |x|\). Since \(v_p(x)\) in (6) tends to zero with p, so does its product with the convergent factor \(\frac{1}{p} \, (1-\frac{1}{|x|^p})\). This proves the claim for h(x), with \(f(x,p):= \frac{1}{p} \, (1-\frac{1}{|x|^p})\, v_p(x)\). The case of s(x) is analogous. \(\square \)
While both estimates in Lemma 5 may apply to a given value x, the two values \(y_p\) will be situated in different Y-intervals because s(x) and h(x) are; see Fig. 11.
The remaining challenge is in establishing an upper bound on \(|z_p(y^{*})|^{-1} \) that converges as p tends to 0 (the limit of convergence may depend on x). This task will require some case analysis, because different signs of the expressions within \(|\cdot |\) in (5), and the coordinate axes, split the plane into several cells shown in Fig. 11. Of the cells coloured grey, those of type S contain a segment of line \(s(x)=-x/u\), and those labelled H, a segment of hyperbola \(h(x)=-u/x\). Figure 11 also shows the equations for \(v_p(x)\) and \(w_p(y)\) in their respective columns and rows of cells.
3.2 Hyperbolae
We begin our case analysis with the cells \(\mathbf {H_i}\) for which we want to prove that \(B_p(a,b)\) converges to \(y=h(x)\), using Lemma 5.
First, let \((x,y_p)_p\), for \(p\rightarrow 0\), be a sequence of points on \(B_p(a,b)\) in \(\mathbf {H_2}\).
Note that inside \(\mathbf {H_2}\) we always have \(-u< x < 0\), and \(h(x), y_p > 1\); see Fig. 12. Moreover, (5) becomes
compare Fig. 11. We want to find an upper bound on \(|z_p(y^{*})|^{-1}\), where
and \(y^{*}\) lies between \(y_p\) and h(x). To this end, we first observe:
Lemma 6
For all p close enough to zero, \(y_p\) and h(x) both lie in the open interval \((1, 2\, h(x) + 3)\).
Proof
\(y_p\) and h(x) are both greater than 1, as we are considering \(\mathbf {H_2}\). Obviously, \(h(x) < 2 h(x) + 3\). It remains to show \(y_p < 2 h(x) + 3\). Let us rewrite the bisector equation for \((x,y_p)\),
with functions \(j(z):=(u+z)^p\) and \(m(z):= (y_p-z)^p\). Applying the mean value theorem to both sides yieldsFootnote 3
with \(z_1 \in (-x,x)\) and \(z_2 \in (-1,1)\). If |p| is small enough to guarantee \((-x)^{\frac{1}{p-1}} < \frac{2}{-x}\), then cancelling out \(-2p\), raising both sides to power \(\frac{1}{p-1}\), and solving for \(y_p\) leads to
\(\square \)
Furthermore, \(|z_p(y)|^{-1}\) increases with y, as the denominator in (7) decreases in y. Indeed,
holds since \(p-1\) is negative and \((y - 1)^{p-2} - (y + 1)^{p-2}\) is positive for \(y > 1\) and \(p < 1\).
With Lemma 6 it follows that \(|z_p(y^*)|^{-1} < |z_p(y)|^{-1}\) for \(y = 2\,h(x) + 3\). Thus we obtain:
This bound converges [namely, to \((2 h(x) + 2)(2 h(x) + 4)/2\)] as p tends to zero. Thus, with Lemma 5 it follows that sequence \((x,y_p)_p\) in \(\mathbf {H_2}\) converges to the hyperbola point (x, h(x)) for \(p\rightarrow 0\).
Next, we consider the hyperbola in cell \(\mathbf {H_4}\). In here, the bisector equation reads
and we want to establish an upper bound on \(|z_p(y^{*})|^{-1}\), where
and \(y^{*}\) lies between \(y_p\) and h(x), which, by definition of \(\mathbf {H_4}\), both lie in the open interval \((-1,1)\).
If y in (8) gets close to 1, the term \((1-y)^{p-1} \) tends to infinity, so that \(|z_p(y)|^{-1}\) goes to zero. The same holds for y close to \(-1\). Between these extremes, that is, inside the open interval \((-1,1)\), the derivative
has a unique zero for \(1-y = 1+y\), that is, at \(y=0\), where \(|z_p(y)|^{-1}\) takes on its maximum value \(\frac{1}{2}\). Thus we get \(|z_p(y^{*})|^{-1} \le |z_p(0)|^{-1} = \frac{1}{2}\), which, with Lemma 5, completes the proof that the sequence \((x,y_p)_p\) in \(\mathbf {H_4}\) converges to the hyperbola point (x, h(x)) for \(p\rightarrow 0\).
The analysis of cells \(\mathbf {H_1}\) and \(\mathbf {H_3}\) is symmetric.
3.3 Lines
Now we show that the part of \(B_p(a,b)\) within cells \(\mathbf {S_i}\) converges to the line \(s(x)=-x/u\) passing through vertices \(\lambda \) and \(\rho \) of the bounding box of a, b. First, we consider cell \(\mathbf {S_1}\); see Fig. 13.

The line \(s(x)=-x/u\) to the left of vertex \(\lambda \)
Here the bisector equation reads
which results in
This expression is the same as (7) in the discussion of cell \(\mathbf {H_2}\). We can deal with it in the same way, replacing h(x) by s(x) and with x and u changing roles accordingly. For completeness, we include the proof of the resulting variation on Lemma 6.
Lemma 7
For all p close enough to zero we have \(y_p < 2 \, s(x) +3 \).
Proof
Here, we rewrite the equation for \((x,y_p)\)
with functions \(j(z):=(-z-x)^p\) and \(m(z):= (y_p-z)^p\). Applying the mean value theorem to both sides yields
with \(z_1 \in (-u,u)\) and \(z_2 \in (-1,1)\). If |p| is small enough to guarantee \(u^{\frac{1}{p-1}} < \frac{2}{u}\), then cancelling out \(-2p\), raising both sides to power \(\frac{1}{p-1}\), and solving for \(y_p\) leads to
\(\square \)
The rest of the proof follows the same reasoning as for \(\mathbf {H_2}\), with the upper bound on \(|z_p(y^*)|^{-1}\) converging to \((2(s(x)+2)(2(s(x)+4)/2\). With Lemma 5 it follows that sequence \((x,y_p)_p\) in \(\mathbf {H_1}\) converges to the point (x, s(x)) for \(p\rightarrow 0\). For cell \(\mathbf {S_4}\), the discussion follows the same line.
So let us, finally, look at cell \(\mathbf {S_2}\) in the centre, where the bisector equation reads
We obtain
the same as in \(\mathbf {H_4}\). As calculated in Sect. 3.2, it follows that \(|z_p(y^*)|^{-1} < \frac{1}{2}\) holds and therefore, by Lemma 5, the sequence \((x,y_p)_p\) in \(\mathbf {S_2}\) converges to the point (x, s(x)) for \(p \rightarrow 0\). The same applies to \(\mathbf {S_3}\).
This completes the proof of Lemma 2.
3.4 Proof of Existence
It remains to prove Lemma 1 of Sect. 2 that ensures the existence of the bisector points \((x,y_p)_p\) referred to in Lemma 2. Again, it is helpful to employ a tool like GeoGebra to visualise the graphs of the functions \(v_p\) and \(w_p\) on their respective intervals.
Proof of Lemma 1
We refer to Fig. 11 and the notations given there. We shall study the bisector \(B_p(a,b)\) to the right of the vertical axis; then our arguments carry over to the negative X-range by symmetry.
First observe that all points (x, y) within the upper right quadrant are closer to b than to a with respect to both coordinates. Thus, the white cells in the upper right quadrant belong to the Voronoi region of b and cannot contain any bisector points of \(B_p(a,b)\).
It remains to prove that for any \(x \in (0,u)\), the cells \(\mathbf {H_3}\) and \(\mathbf {S_3}\) each contain a bisector point of \(B_p(a,b)\) on the vertical line at x, and for any \(x \in (u,\infty )\), the cells \(\mathbf {S_4}\) and \(\mathbf {H_4}\) each contain a bisector point of \(B_p(a,b)\) on the vertical line at x. This time, the cases \(p > 0\) and \(p < 0\) require different arguments.
We first consider the case \(p > 0\). If \(x \in (0,u)\), then \(v_p(x) = (u+x)^p - (u-x)^p\); if \(x \in (u,\infty )\), then \(v_p(x) = (x+u)^p - (x-u)^p\). Thus, for any \(x \in (0,u) \cup (u,\infty )\), it holds that \(v_p(x) < 1\) once p is small enough.
Now let \(x \in (0,u) \cup (u,\infty )\) be fixed. Then, for the lowest Y-interval \((-\infty ,-1)\) we have \(w_p(y)= (-y+1)^p -(-y-1)^p\), henceFootnote 4
Once p is small enough to ensure \(v_p(x) < 1\), there will always be \(y_p\) in \((-\infty ,-1)\) such that \(v_p(x)=w_p(y_p)\) holds, because \(2^p\) goes to 1 from above. Thus, there is a point \((x,y_p)\) of \(B_p(a,b)\) in \(\mathbf {H_3}\) for any \(x \in (0,u)\) and there is a point \((x,y_p)\) of \(B_p(a,b)\) in \(\mathbf {S_4}\) for any \(x \in (u,\infty )\).
For y in the Y-range \((-1,0)\), we have \(w_p(y)= (1-y)^p - (1+y)^p\) and \(w_p((-1,0 )) = (0,2^p)\), so that the same arguments apply for regions \(\mathbf {S_3}\) and \(\mathbf {H_4}\).
Now consider the case of \(p < 0\). Function \(v_p(x)\) is now negative and goes to \(-\infty \) at \(x=u\), whereas \(v_p(x)\) goes to 0 for \(x=0\) and \(x\rightarrow \infty \). Thus we have \(v_p((0,u)) = v_p((u,\infty )) = (-\infty , 0)\). On the other hand, we have \(w_p((-\infty ,-1 )) = (-\infty ,0)\), with a pole at \(y=-1\), covering every possible value of \(v_p(x)\). Thus, for any x in (0, u) or \((u,\infty )\) there is a \(y_p \in (-\infty ,-1)\) such that \(v_p(x) = w_p(y_p)\) holds, proving the existence of a bisector point at x in \(\mathbf {H_3}\) or \(\mathbf {S_4}\), respectively.
The case of Y-interval \((-1,0)\) for the cells \(\mathbf {S_3}\) and \(\mathbf {H_4}\) is similar: we have \(w_p((-1,0))=(-\infty ,0)\).
This completes the proof of Lemma 1. \(\square \)
Now, let us discuss what bisector points are situated on the vertical lines at \(x \in \{-u,0,u\}\) and the horizontal lines at \(y \in \{-1,0,1\}\) that separate the cells that were considered so far.
If \(x = 0\), the bisector (5) becomes
which is satisfied by the single value \(y=0\), which proves that for any \(p \ne 0\), the bisector \(B_p(a,b)\) contains the origin (which also lies on \(B_*(a,b)\)), but no other point on the vertical axis. By an analogous calculation, the bisector contains no other point on the horizontal axis.
Now consider the horizontal line \(y = -1\). For points on this line, and for \(p>0\), the bisector (5) becomes
For fixed \(p \in (0,1)\), the left-hand side, as a function of x, is negative and decreasing for \(x < -u\), drops to \(-u^p\) at \(x = -u\), rises to \(u^p\) at \(x = u\), and then decreases towards its asymptotic value 0. Thus, the line \(y = -1\) always contains two points \((x_p,-1)\) and \((x'_p,-1)\) of \(B_p(a,b)\), where \(-u< x_p< u < x'_p\). As p tends to 0, we find that \(x_p\) and \(x'_p\) both converge towards u. Indeed, as p tends to 0, the maximum \(u^p\) at \(x = u\) of the left-hand side converges towards the value of the right-hand side, namely 1, whereas the value of the left-hand side converges towards \(-1\) for \(x = -u\) and towards 0 for any other x. Thus, as p tends to 0 from above, the intersection of \(B_p(a,b)\) with the line \(y = -1\) converges to the point \((u,-1)\).
If p tends to zero from below, then the line \(y=-1\) does not contain any points of \(B_p(a,b)\) except \((u,-1)\), because by substituting \(y=-1\) in the bisector equation
the left-hand side becomes zero, by our continuation of \(L_p\) to arguments of value zero, and the right-hand side \((|x-u|^p + 2^p)^{1/p}\) can only be zero for \(x=u\). Thus, the intersection of \(B_p(a,b)\) with the line \(y = -1\) converges to the point \((u,-1)\) as p tends to zero from above or below.
By symmetric arguments, the intersection of the \(B_p(a,b)\) with the line \(y = 1\) converges to the point \((-u,1)\) as p tends to zero.
Now consider the vertical line \(x = u\). For \(p>0\), the bisector (5) becomes
The left-hand side, as a function of y, has its unique minimum \(-1/u^p\) at \(y = -1\), so (recall \(u \ge 1\)) the equation cannot be fulfilled and no points of \(B_p(a,b)\) are on the line \(x = u\) for any \(p > 0\), unless \(u = 1\) holds.Footnote 5 If \(u=1\) or \(p<0\), then \((u,-1)\) is the only point of \(B_p(a,b)\) on the line \(x = u\).
By symmetric arguments, the intersection of \(B_p(a,b)\) with the line \(x = -u\) is empty for any \(p > 0\) and \(u > 1\), and contains only the point \((-u,1)\) for \(p < 0\) or \(u = 1\).
Thus, as p approaches 0, the points of \(B_p(a,b)\) that are on the lines \(x \in \{-u, 0, u\}\) and \(y \in \{-1, 0, 1\}\) converge to \((-u,1)\), the origin, and \((u,-1)\), which all lie on the line \(y = -x/u\) of \(B_*(a,b)\). Together with Lemma 2, this implies that \(B_p(a,b)\) converges to exactly the complete line \(y = -x/u\) and the complete hyperbola \(y = -u/x\) that make up \(B_*(a,b)\).
It remains to discuss the Voronoi regions \(\lim _{p\rightarrow 0} V_p(a,b)\) and \(\lim _{p\rightarrow 0} V_p(b,a)\). As the \(L_p\) measures are continuous for any \(p \ne 0\), the Voronoi regions must consist of entire faces of the subdivision of the plane that is induced by \(B_p(a,b)\). To complete the proof of Theorem 1, we only need to show that, regardless of whether p tends to zero from above or from below, \(V_p(a,b)\) converges to the same selection of three faces of the subdivision induced by \(B_*(a,b)\), namely the faces that constitute \(V_*(a,b)\). Because the \(L_p\) distances are continuous, it suffices to verify this on the basis of one point in the interior of each face.
In particular, consider the points \(a = (-u,-1)\), \(\gamma = (-u,2)\) and \(\delta = (2u,-1)\). These points obviously belong to \(V_*(a,b)\) and to \(V_p(a,b)\) if \(p < 0\), since their distance to a is zero whereas their distances to b are positive. When p approaches zero from above, these points also belong to \(V_p(a,b)\): the point a trivially so; the point \(\gamma \) because the bisector does not intersect the vertical line that contains a and \(\gamma \) (as we have seen above); and, finally, the point \(\delta \) because:
which holds for all positive p close enough to zero, as the left-hand side converges to 0 while the right-hand side converges to 1.
This completes the proof of Theorem 1.
Data Availability
Data sharing is not applicable to this article as no datasets were generated or analysed during the current study.
Notes
Personal communication by Raimund Seidel.
Our GeoGebra worksheets can be downloaded from http://herman.haverkort.net/L0-Distance/.
We can write \(j'(z)\) since it is clear that the derivative is taken with respect to z.
One can apply L’Hospital’s rule to \(w_p(y) \, =\, \frac{ (\frac{-y+1}{-y-1})^p -1 }{ (-y-1)^{-p} }\) to show that \(w_p(y)\) goes to zero for \(-\infty \leftarrow y\).
Note this means that in Fig. 1, right, the two yellow faces on the left are actually a single face; only in the limit as p drops to zero, will the boundaries of the two upper blue faces really touch each other and separate the two yellow faces on the left from each other.
References
Aurenhammer, F., Wallner, J., Peternell, M., Pottmann, H.: Voronoi diagrams for oriented spheres. In: Proc. 4th international conference on Voronoi diagrams in science and engineering, pp 33–37. IEEE (2007)
Chazelle, B., Drysdale, R.L.S., Lee, D.T.: Computing the largest empty rectangle. SIAM J. Comput. 15, 300–315 (1986)
Haverkort, H.: Vorosketch, version 0.37\(\beta \). http://herman.haverkort.net/vorosketch/. Accessed 22 March 2023
Klein, R., Driemel, A., Haverkort, H.: Algorithmische Geometrie: Grundlagen, Methoden, Anwendungen. Springer, Wiesbaden (2022)
Okabe, A., Boots, B., Sugihara, K., Chiu, S.N.: Spatial tessellations: concepts and applications of Voronoi diagrams. Wiley, Hoboken (2000)
Stack Exchange (various authors). "Scaled \(L^p\) norm" and geometric mean, discussion on Mathematics Stack Exchange (2013). https://math.stackexchange.com/questions/282271/scaled-lp-norm-and-geometric-mean. Accessed 20 July 2023
Wikipedia. https://en.wikipedia.org/wiki/Lp_space#When_p_=_0. Accessed 11 July 2022
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Editor in Charge: Kenneth Clarkson
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Haverkort, H., Klein, R. The Limit of \(L_p\) Voronoi Diagrams as \(p\rightarrow 0\) is the Bounding-Box-Area Voronoi Diagram. Discrete Comput Geom (2023). https://doi.org/10.1007/s00454-023-00599-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00454-023-00599-6