
Abstract
For convex partitions of a convex body B, we try to put a homothetic copy of B into each set of the partition so that the sum of the homothety coefficients is at least 1. In the plane this can be done for an arbitrary partition, while in higher dimensions we need certain restrictions on the partition.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Alfred Tarski [12] proved that for any covering of the unit disk by planks (the sets a≤λ(x)≤b for a linear function λ and two reals a<b), the sum of plank widths is at least 2. Thøger Bang [3] generalized this result for covering of a convex body B in ℝd by planks showing that the sum of the widths is at least the width of B. He also posed the following question: Can the plank widths in the Euclidean metric be replaced by the widths relative to B (as in Definition 2 below)?
Keith Ball [2] proved the conjecture of Bang for centrally symmetric bodies B or, in other words, for arbitrary normed spaces and coverings of the unit ball. For possibly nonsymmetric B, it is known (see [1]) that the Bang conjecture is equivalent to the Davenport conjecture: If a convex body B is sliced by n−1 hyperplane cuts, then there exists a piece that contains a translate of \(\frac{1}{n}B\).
In [5, 6] András Bezdek and Károly Bezdek proved an analogue of the Davenport conjecture for binary partitions by hyperplanes. The difference is that they do not cut everything with every hyperplane; instead, they divide one part into two parts and then proceed recursively.
One of the strongest results about coverings of a unit ball for the Hilbert (and finite-dimensional Euclidean) space was proved by Vladimir Kadets [10] (see also [4] for the proof in the two-dimensional case using the idea from [12]): For any convex covering C 1,…,C k of the unit ball, the sum of the inscribed ball radii \(\sum_{i=1}^{k} r(C_{i})\) is at least 1.
The reader is referred to [7] for a detailed historical survey on the Tarski plank problem. Some other open problems can be found in [9].
In this paper we prove analogues of the Kadets theorem for inscribing homothetic copies of a (not necessarily symmetric) convex body, replacing arbitrary coverings by certain convex partitions. By a partition of a convex set B we mean a covering of B by a family of closed convex sets with disjoint interiors. In the two-dimensional case the analogue of the Kadets theorem for possibly nonsymmetric bodies (Theorem 2) holds for any partition, while in higher dimensions we need additional restrictions on the partition. In other words, we are solving positively certain particular cases of [7, Problem 4.4.2] about extending the Kadets theorem to Banach spaces.
We work in finite-dimensional spaces. If one needs analogues for infinite-dimensional Banach spaces, then the standard approximation argument works as in [10].
This paper is organized as follows. In Sect. 2 we define inductive partitions and prove a Kadets-type result for such partitions. In Sect. 3 we introduce affine partitions and hierarchical affine partitions, which are very natural examples of inductive partitions.
The main result of the paper, the case of two-dimensional partition, is proved in Sect. 4. In Sect. 5 we introduce inductive coverings. This is a special type of coverings, for which our methods prove a Kadets-type theorem. Section 6 is not connected with the previous sections directly; there we give a simplified proof of the Bezdek–Schneider analogue of the Kadets theorem on the sphere. In Sect. 7 we show that in the hyperbolic case the Kadets theorem does not hold.
2 Inductive Partitions
Let us describe the class of partitions, for which an analogue of the Kadets theorem is true:
Definition 1
A convex partition V 1∪⋯∪V k of ℝd is said to be inductive if for any 1≤i≤k, there exists an inductive partition W 1∪⋯∪W i−1∪W i+1∪⋯∪W k such that W j ⊇V j for any j≠i. A partition into one part V 1=ℝd is assumed to be inductive.
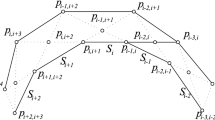
A natural example of an inductive partition is a Voronoi partition or, more generally, a projection of lower faces of a convex polytope. In the next section we generalize these examples and discuss hierarchical affine partitions, which are the only examples of inductive partitions that we know. An example of a noninductive partition is outlined on Fig. 1.

Not inductive partition
Now we define the inradius relative to B:
Definition 2
Let B⊂ℝd be a convex body. For a convex set C⊆ℝd, define the analogue of the inscribed ball radius as follows:
and r B (C)=−∞ for empty C.
Now we are ready to state one of the main results.
Theorem 1
Let B⊂ℝd be a convex body, and let C 1∪⋯∪C k =B be induced from an inductive partition V 1∪⋯∪V k =ℝd (that is, C i =V i ∩B for any i). Then
Before proving this theorem we need a lemma about the inradius.
Lemma 1
Let a convex polytope C⊂ℝd be defined by linear inequalities for i=1,…,m:
Denote by \(C(\bar{y})\) the polytope defined by the inequalities
where \(\bar{y} = (y_{1}, \ldots, y_{m})\) is a vector of reals. Then \(r_{B}(C(\bar{y}))\) is a concave function of \(\bar{y}\).
Proof
Denote the set of indices [m]={1,…,m}. By the Helly theorem we have
where \(C_{I}(\bar{y})\) is defined by the inequalities λ i (x)+y i ≤0 for i∈I. The sets \(C_{I}(\bar{y})\) are either Cartesian products of a linear subspace L⊂ℝd of positive dimension with a lower-dimensional polyhedral set \(C'_{I}(\bar{y})\), or simplicial cones, or simplices. In the first case we use induction on the dimension. In the second case we note that \(r_{B}(C_{I}(\bar{y}))=+\infty\). In the third case the function \(r_{B}(C_{I}(\bar{y}))\) is obviously linear. Hence, for any \(C_{I}(\bar{y})\), the inradius \(r_{B}(C_{I}(\bar{y}))\) is a concave function of \(\bar{y}\). Therefore the inradius \(r_{B}(C(\bar{y}))\) is concave as an infimum of concave functions. □
Lemma 2
Let C 1,…,C m be a family of convex bodies in ℝd. Then the inradius of the intersection of translates
is a concave function of \(\bar{y} = (y_{1}, \ldots, y_{m})\in(\mathbb{R}^{d})^{\times m}\).
Proof
When C i ’s are polytopes, this is a particular case of Lemma 1. The general case is made by approximating C i ’s by polytopes and passing to the limit. □
Remark 1
In the above lemmas we actually prove that the set of vectors \(\bar{y}\) such that the considered function of \(\bar{y}\) is >−∞ is a convex closed set.
Proof of Theorem 1
Let us vary the vector y∈ℝd and define C i (y)=B∩(V i +y). The function \(r(y) = \sum_{i=1}^{k} r_{B}(C_{i}(y))\) is a concave function of y by Lemma 2, and the set Y={y:r(y)>−∞} is a convex closed set. If y is in the boundary of Y, then at least one of C i (y) has the empty interior. In this case we can omit the corresponding V i and consider a smaller partition {W j } j≠i , which induces the same partition {(W j +y)∩B} j≠i as {(V j +y)∩B} up to sets with empty interior.
Thus, by induction we have r(y)≥1 on ∂Y. Along with the concavity of r(y), this implies r(y)≥1 on the whole Y unless Y is a halfspace. From the obvious formula (the sum is the Minkowski sum)
it follows that Y can be a halfspace if and only if every V i contains the same halfspace. This is impossible unless k=1; but for k=1, the theorem is obviously true. □
3 Affine Partitions
In this section we describe constructively a certain class of inductive partitions.
Definition 3
For a sequence of affine (linear with possible constant term) functions F={λ 1,…,λ k }, define the affine partition P(F) of ℝd by
An affine partition of a subset X⊂ℝd is defined as a restriction of an affine partition of the whole ℝd.
Remark 2
Affine partitions are also known as generalized Voronoi partitions or power diagrams, but we use the term affine for brevity.
Corollary 1
Let B⊂ℝd be a convex body, and let C 1∪⋯∪C k =B be its affine partition. Then
Proof
It suffices to show that any affine partition is inductive. Starting from V 1∪⋯∪V k =ℝd defined by {λ 1,…,λ k }, we omit λ i from the list and obtain another affine partition {W j } j≠i such that W j ⊇V j for any j≠i. So the induction step is possible. □
A straightforward generalization of an affine partition is a hierarchical affine partition:
Definition 4
By induction: If in a hierarchical affine partition C 1∪⋯∪C k we partition some C i by an affine partition, we obtain again a hierarchical affine partition.
Let us show that a hierarchical affine partition is a limit of affine partitions.
Lemma 3
Suppose that B is a convex body and C 1∪⋯∪C k =B is its hierarchical affine partition. Then this partition can be approximated by an affine partition with arbitrary precision in the Hausdorff metric.
Proof
From the definition we know that there exists a graded tree T with an affine function λ v in every vertex v∈T such that the sets C i correspond to the leaves ℓ i of T; the condition x∈C i is equivalent to λ v (x)≤λ w (x) for any v in the ancestors of ℓ i and w a sibling of v.
Now we take ε>0 small enough and for any C i and its corresponding ℓ i , consider the full chain from the root v 0<v 1<⋯<v m =ℓ i and the corresponding affine function
Now it is obvious that the affine partition of B corresponding to \(\{ \lambda_{i,\varepsilon}\}_{i=1}^{k}\) tends to \(\{C_{i}\}_{i=1}^{k}\) as ε tends to +0. □
Even without this lemma it is obvious that Corollary 1 holds for hierarchical affine partitions by induction. Note that a binary partition by hyperplanes is a particular case of a hierarchical affine partition.
4 The Two-Dimensional Case
Now we are ready to prove an analogue of the Kadets theorem in the plane. The key property of an inductive partition in the proof of Theorem 1 is actually the following: we consider convex partitions C 1∪⋯∪C k =B that can be extended to a convex partition V 1∪⋯∪V k =ℝd. Then we can translate V i ’s with y so that one of the sets C i =V i ∩B disappears, remove C i , extend the partition {C j } j≠i again to a new partition of the whole space, and so on.
In the plane the extension is always possible by the following:
Lemma 4
Any convex partition C 1∪⋯∪C k =B⊂ℝ2 can be extended to a partition V 1∪⋯∪V k =ℝ2.
Proof
The boundary ∂B consists of parts of the boundaries ∂C i . Denote the vertices of this partition by a 1,a 2,…,a n . Denote the polygon a 1 a 2⋯a n by A. Note that for some C i s, we may have more than one corresponding part of ∂B.
Obviously, from each point a i it is possible to draw a ray ℓ i outside B with the following property: For any set C j and its corresponding boundary segment [a i a i+1] (the indices are understood cyclically a n+1=a 1), the union of C j and the area that is bounded by [a i a i+1], ℓ i , and ℓ i+1 is convex. For the rays ℓ i , one can take the extension of the interior with respect to B side of C j after a i .
Our goal is to erase parts of the rays ℓ i and obtain a partition of ℝ2∖A into n convex parts. At the start the rays may partition ℝ2∖A into a larger number of parts.
We perform erasing as follows. Suppose that b j is a point of transversal intersection of two rays ℓ s and ℓ t that is closer to A than other points of transversal intersection of the remaining rays. Note that the segments b j a s and b j a t do not intersect with other rays ℓ i transversally (in this case the point of intersection would be closer to A than b j ). Erase part of one of the rays ℓ s or ℓ t after b i and start a new iteration of this process again. Some rays actually become segments, but it does not matter.
After each step we have a convex partition of ℝ2∖A, and finally we obtain a partition into exactly n parts.
After taking union of these parts with their corresponding sets C i , we obtain the required extension of the partition to the whole plane, see Fig. 2.

Extending the partition
□
Now we are ready to state the result.
Theorem 2
Let B⊂ℝ2 be a convex body, and let C 1∪⋯∪C k =B be its convex partition. Then
Proof
We extend the partition C 1∪⋯∪C k =B to V 1∪⋯∪V k =ℝ2 by Lemma 4. Then the function
is again concave, so by varying y we can make one of B∩(V i +y) have the empty interior without increasing r(y). Then we omit V i , obtain a partition of B into fewer parts, and use the inductive assumption. □
5 Possible Extension to Coverings
Theorem 2 is quite close to the plane case of the Bang conjecture, which we restate here: If B⊂ℝ2 is covered by a set of planks W 1∪⋯∪W k ⊇B, then \(\sum_{i=1}^{k} r_{B}(W_{i}) \ge\nobreak 1\). The key difference is that in the Bang conjecture we have a covering, not a partition. Intuitively, a partition is something smaller than covering and therefore has smaller sum of “inradii.” But already in the case of ℝ2 there exist coverings that do not contain partitions. A simple example is a set of planks C i passing through the center of a disk B, forming a “sunflower” so that each of the sets C i ∩∂B consists of two disjoint arcs and these arcs partition ∂B.
It is easily verified that Theorem 1 holds (with the same proof literally) for coverings instead of partitions if we define an inductive covering by the following:
Definition 5
Call a convex covering (by closed sets) V 1∪⋯∪V k of ℝd inductive if for any 1≤i≤k, there exists an inductive covering W 1∪⋯∪W i−1∪W i+1∪⋯∪W k such that W j ⊆V j ∪V i for any j≠i. A covering by one set V 1=ℝd is assumed to be inductive.
Returning to the Bang conjecture, we see the unpleasant thing: If we cover some part of ℝ2 by planks and the remaining part is covered by the corresponding (possibly infinite) polygons, then none of the polygons can be deleted, so this is an example of a noninductive covering of the plane.
6 Notes on the Spherical Kadets Theorem
In [8] Károly Bezdek and Rolf Schneider proved the following version of the Kadets theorem in the spherical geometry:
Theorem 3
(K. Bezdek, R. Schneider, 2010)
If the sphere \(\mathbb{S}^{n}\) is covered by spherical convex sets K i , then we have the following inequality for the inradii:
Here we use the standard intrinsic metric of the unit sphere. By a convex set we mean the intersection of this sphere and a convex cone whose apex is at the center of the sphere.
This theorem gives rise to the following:
Problem 1
(K. Bezdek, R. Schneider, 2010)
Suppose that \(B_{\rho}\subset\mathbb{S}^{n}\) is a ball of radius ρ in the spherical geometry. Suppose that B ρ is covered by spherical convex sets K i . Prove that
As it is noted in [8], Theorem 3 solves this problem for ρ≥π/2, the solution being essentially volumetric. But if ρ→0, then this problem approaches the original Kadets theorem, which has no volumetric solution for n>2. So it seems that solving this problem for ρ in the range (0,π/2) must require a new approach.
Let us outline the proof of Theorem 3. This proof is essentially the same as that given in [8]; but we simplify it and split into several lemmas, some of which may be of interest on their own.
Lemma 5
Let μ be a spherically symmetric absolute continuous measure on ℝn, B be a ball centered at the origin, and T be a 0-starshaped body. Then
Proof
The proof will use a very simple case of the needle decomposition (see [11] for example). Let us split ℝn into convex cones V i of equal measures μ(V i ). Note that the sets V i ∩B will also have equal measures because of the spherical symmetry of μ. The lemma will follow from the inequality
by summation. The partition can be made so that every V i gets arbitrarily close to a one-dimensional ray, and the limit case of (1) becomes an inequality for nonnegative functions:
which simply follows from the observation that min{X,Y}Z≥XY for any X,Y∈[0,Z]. □
Lemma 6
Let us work in the spherical geometry. Suppose that \(H\subset\mathbb{S}^{n}\) is a hemisphere with center o, B is a ball of radius ≤π/2 centered at o, and T is an o-starshaped body in H. Then
for the standard measure σ on the sphere.
Proof
Follows from Lemma 5 by central projection of H onto ℝn such that o goes to 0. □
Lemma 7
Let X be s subset of the sphere \(\mathbb{S}^{n}\) not contained in an open hemisphere, and X 0 be a set consisting of two antipodal points on the sphere. Then for their ε-neighborhoods (in the spherical geometry), we have
Proof
Without loss of generality, let X={o 1,…,o m } be finite. Consider the hemispheres H i with respective centers o i and the Voronoi regions V i of o i . Note that V i ⊆H i for every i. Denote the measure of the whole sphere \(\mathbb{S}^{n}\) by σ n .
Then by Lemma 6
hence,
and then by summing over i and multiplying by 2,
where B ∗(ε) is any ball (on the sphere) of radius ε. So we obtain
□
Lemma 8
Let μ be an absolutely continuous spherically symmetric measure on ℝn. Suppose that K is a convex body in ℝn with inscribed ball B, centered at the origin. Then
where T is a plank with inscribed ball B.
Proof
Representing the measure μ as an integral, it suffices to prove the inequality
for any sphere S centered at the origin. Let the radii of B and S be r and R, respectively. For R≤r, inequality (2) is obvious, so we consider R>r.
The set T∩S is the complement of the ε-neighborhood of two opposite points X 0 in S, where ε=arccosr/R. Since K has B as the inscribed ball, the set X′=∂K∩B contains the origin in its convex hull. It is easy to see that the set X=R/rX′ is not contained in an open hemisphere and that its ε-neighborhood is disjoint with K∩S. By Lemma 7,
hence
which is exactly (2). □
Now we deduce the following (the same as [8, Theorem 2]):
Lemma 9
Suppose that K is a convex body in \(\mathbb{S}^{n}\) with inscribed ball B. Then
where K 0=H 0∩H 1 is an intersection of two hemispheres with inscribed ball B. Note that σ(K 0) equals \(\frac{\alpha \sigma_{n}}{2\pi}\), where α is the angle between H 0 and H 1.
Proof
Obtained from Lemma 8 by central projection that takes the center of B to the origin in ℝn. □
Now Theorem 3 follows from Lemma 9 by bounding from above the volume of every K i in terms of r(K i ).
7 The Hyperbolic Kadets Theorem
It is interesting that the Kadets theorem does not hold for hyperbolic space unlike the spherical case mentioned above. We skip the calculation here because of the negativity of this result, but the figures should be sufficiently convincing.
Consider a sufficiently large disk Ω and a regular hexagon inscribed in it. Let us cover this disk by two convex shapes, which are drawn in Fig. 3 (this is the Poincaré model). The maximal inscribed disk of a shape is drawn by a dashed line. Since it does not contain the center of Ω, its radius is less than half of the radius of Ω.

Disk covering
Note that this counterexample uses essentially that C 1 and C 2 do intersect. The authors do not know whether the Kadets theorem holds for partitions in the hyperbolic space.
References
Alexander, R.: A problem about lines and ovals. Am. Math. Mon. 75, 482–487 (1968)
Ball, K.: The plank problem for symmetric bodies. Invent. Math. 104(3), 535–543 (1991). doi:10.1007/BF01245089
Bang, T.: A solution of the “plank problem”. Proc. Am. Math. Soc. 2, 990–993 (1951)
Bezdek, A.: On a generalization of Tarski’s plank problem. Discrete Comput. Geom. 38(2), 189–200 (2007). doi:10.1007/s00454-007-1333-8
Bezdek, A., Bezdek, K.: A solution of Conway’s fried potato problem. Bull. Lond. Math. Soc. 27(5), 492 (1995)
Bezdek, A., Bezdek, K.: Conway’s fried potato problem revisited. Arch. Math. 66(6), 522–528 (1996)
Bezdek, K.: Classical Topics in Discrete Geometry. Springer, Berlin (2010). doi:10.1007/978-1-4419-0600-7
Bezdek, K., Schneider, R.: Covering large balls with convex sets in spherical space. Contrib. Algebra Geom. 51(1), 229–235 (2010)
Brass, P., Moser, W., Pach, J.: Research Problems in Discrete Geometry. Springer, New York (2005)
Kadets, V.: Coverings by convex bodies and inscribed balls. Proc. Am. Math. Soc. 133(5), 1491–1496 (2005)
Nazarov, F., Sodin, M., Vol’berg, A.: The geometric Kannan–Lovász–Simonovits lemma, dimension-free estimates for the distribution of the values of polynomials, and the distribution of the zeros of random analytic functions. St. Petersburg Math. J. 14(2), 351–366 (2002)
Tarski, A.: Further remarks about the degree of equivalence of polygons. Odbitka Z. Parametr. 2, 310–314 (1932)
Acknowledgements
The research of both authors is supported by the Dynasty Foundation, the President’s of Russian Federation grant MD-352.2012.1, the Russian Foundation for Basic Research grant 10-01-00096, the Federal Program “Scientific and scientific-pedagogical staff of innovative Russia” 2009–2013, and the Russian government project 11.G34.31.0053. The research of A.V. Akopyan is also supported by the Russian Foundation for Basic Research grant 11-01-00735, and the research of R.N. Karasev is also supported by the Russian Foundation for Basic Research grant 10-01-00139.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Akopyan, A., Karasev, R. Kadets-Type Theorems for Partitions of a Convex Body. Discrete Comput Geom 48, 766–776 (2012). https://doi.org/10.1007/s00454-012-9437-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00454-012-9437-1