
Abstract
In this article, we discuss measures for fibers having a curvilinear shape. This is the case, for example, for man-made cellulose fibers having a weak stiffness. The fibers are bent during the injection molding process of short fiber reinforced plastics. For this purpose, \(\mu \)-CT data can be evaluated and several measures can be introduced defining the geometrical orientation of the fibers. These measures are the length, a mean curvature, and the mean torsion. Furthermore, a mean orientation of a fiber and a mean deviation to a straight line can be defined. Additionally, to these measures, which are based on a continuous interpolation of given data points, discretized quantities only considering the data points are compared. Finally, the distributions of these measures at real \(\mu \)-CT data are provided.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Natural fibers are of particular interest in view of sustainability developments, see [6]. Man-made cellulose fiber reinforced injection molded components are an interesting alternative to glass fiber reinforced plastics for certain applications due to their high mechanical properties (elongation at break: 13%) and lower density (1.5 g\(\,\hbox {cm}^{-3}\)). They also have a lower bending stiffness than glass fibers. Man-made cellulose fibers are bent during the injection molding process which leads to faster fiber entanglement and a lower fiber preferred orientation, see [9]. In other words, the lower bending stiffness does also not imply alignment as a straight fiber resulting in an anisotropy of the component properties. Furthermore, it is known, see, for example [14], that a fiber reinforced specimen has different material properties over its thickness, which is caused—apart from the melt flow behavior of the thermoplastic—by the spatial distribution of the fiber orientation. Applications from glass fiber reinforced plastic, where the short fibers are straight lines, are discussed in a number of publications, see, for example [7, 8, 13, 18]. In these publications, the fiber orientation of glass fiber reinforced samples has already been extensively investigated. There, the fiber orientation and the fiber length are mainly evaluated. However, a curved fiber has no unique orientation. Furthermore, it can reach various geometrical forms. Thus, measures, principally describing the specific form, are of particular interest.
Since \(\mu \)-CTs can provide coordinates of each fiber, these can be drawn on to apply interpolation concepts so that a continuous function is assigned to each fiber. These functions can be evaluated, i.e. geometrical measures can be provided. There are two possibilities: first, the simplest approach is to draw on polygon approximations using the coordinates describing the fiber, which is easy to be implemented. Second, continuous formulations can be applied implying further measures such as curvature, and torsion. The latter terms will be explained in detail in Sect. 2. We draw on a spline concept to interpolate the coordinates so that each fiber obtains a continuous representation, and, accordingly, the possibility to apply concepts in differential geometry.
The article is structured as follows: since we are interested to introduce measures of curvilinear fibers, a summary of the description of the local behavior of curves is provided. In a second step, global mean values are proposed. These mean values are the orientation, curvature, torsion, and a mean deviation from a straight line. Afterwards, one special interpolation method, which is based on classical, natural splines, is drawn on to evaluate the proposed measures. Afterwards, a discretized, simplified version is offered. Both schemes are compared using real \(\mu \)-CT data of a man-made cellulose fiber reinforced polypropylene specimen. In this article, the distributions of the measures are discussed.
2 Measures of curvilinear curves
First, we recap some basics in the description of curves, and, subsequently, some measures of curvilinear fibers are proposed characterizing their orientation, curvature and torsion.
2.1 Properties of curves
A curve in the three-dimensional case is described by the position vector \(\mathbf {r} (\xi )\), \(\mathbf {r} \in \mathbb {E}^3\), which depends on a parameter \(\xi \), \(\xi \in [\xi _1,\xi _2]\). The tangent vector is given by
see, for example, [3, 11]. The arc length
represents the length of the covered path from point \(\xi _1\) until point \(\xi \) on the curve, whereas
denotes the length of the curve between two points \(\xi _1\) and \(\xi _2\) (\(\xi _2 > \xi _1\)), see Fig. 1a.

Geometrical description of curves
defines the rate of the arc length representing the norm of the tangent vector or the square root of the metric coefficient concerned. Since \(s,_\xi \ne 0\) holds, there exists a function \(\hat{\xi }(s)\) having the derivative
In this sense, we will need the mapping between the parameter \(\xi \) and the arc length s. In this case, the curve can also be related to the arc length
so that the tangent vector (1) reads
leading to the obvious property
\(\mathbf {e} _t\) is called the unit tangent vector. Using the property
we can see that the vector \({\mathbf {e} _t},_s = \hat{\mathbf { r}} ,_{ss}\) is orthogonal to \(\mathbf {e} _t\), see Eq. (8). This property is chosen to define the unit normal vector
The norm of \(\hat{\mathbf { r}} ,_{ss}\) represents the curvature of the curve
The two vectors \(\mathbf {e} _t\) and \(\mathbf {e} _n\) are chosen to define the binormal unit vector
see Fig. 1a, i.e. the natural basis or trihedron of the curve. Using the Frenet equations, see [11],
motivates an additional local measure—apart the curvature— namely the torsion \(\tau \). Eq. (13)\(_1\) is already provided by Eq. (10) using definition (11), i.e. \(\kappa \) represents the (local) deviation of the curve from a straight line. \(\tau \) is a measure for the (local) deviation of a curve from a flat course, which can be seen at Eq. (13)\(_{2,3}\), where the curve remains in the \((\mathbf {e} _t,\mathbf {e} _n)\)-plane. The torsion itself can be calculated by
see Eq. (13)\(_{2,3}\). Its sign represents the rotation (right- or left handed).
All these expressions look quite simple if an arc length representation is given. However, later on only the parametric representation \(\mathbf {r} (\xi )\) is provided, which requires a different representation. Here, we follow the presentation in [2]. For the subsequent calculations,
is required. Then, the product and chain rule leads to
see Eqs. (5) and (7). This expression is necessary to determine the curvature in Eq. (13)\(_1\) by calculating the cross product with \(\mathbf {e} _t\)
i.e. using the norm of both sides, we obtain after some calculations
Now, using again Eq. (13)\(_{1}\) with (16) and (18), we arrive at the representation for the unit normal vector
With the help of Eqs. (8) and (19), the biaxial unit vector (12) reads
Finally, we would like to express the torsion \(\tau \) by the parameter representation. For this purpose, Eq. (13)\(_{3}\) is chosen and the binormal unit vector (12) is inserted
This is multiplied with \(\mathbf {e} _n = (1/\kappa ) {\mathbf {e} _t},_s\) leading to
i.e. with Eq. (16) and the chain-rule we arrive at an expression of the form
(Here, we need only the term \(\gamma = \Vert \mathbf {r} ,_\xi \Vert ^{-3}\), whereas \(\alpha \) and \(\beta \) will vanish in the subsequent calculations.) We insert Eqs. (16) and (23) into Eq. (22) yielding
with \(\kappa \) from Eq. (18). Thus, all required quantities are provided in dependence of the parameter \(\xi \).
2.2 Measures defining a straight line (fiber)
Short glass or carbon fibers can be modeled as straight lines. For a straight line, \(\hat{\mathbf { r}} (s) = \mathbf {r} _1 + s \mathbf {e} _t\), we have \(\kappa = 0\), and \(\tau \) is defined to be zero (\(\mathbf {e} _n\) is in this case arbitrary, but orthonormal to \(\mathbf {e} _t\)), i.e. only the length L and the orientation \(\mathbf {e} _t\) are chosen for characterizing purposes. The orientation is given by Eq. (8), \(\hat{\mathbf { r}} ,_s = \mathbf {e} _t\), see Fig. 2. Thus, we need the starting and the end point of a fiber, \(\mathbf {r} _1\) and \(\mathbf {r} _2\), respectively,
The orientation vector \(\mathbf {e} _t\) can be expressed in a spherical coordinate system by the two angles \(\varphi \) and \(\vartheta \),
see, for example, [12]. Frequently, the two angles
are chosen for characterizing the orientation of fibers in composites, see, for example, [1, 17]. Thus, straight fibers are simple to be evaluated.
2.3 Measures defining a curve
Since we are interested in scalar measures representing some “mean-value” of measures characterizing curvilinear fibers, we introduce two approaches. First, given data points representing a spatial curve are interpolated to obtain a continuous representation (piece-wise \(\mathcal {C}^\infty \), but globally \(\mathcal {C}^2\) continuous). Based on these approximations, the measures (mean curvature, torsion, direction, and deviation from straight line) are calculated. Afterwards, these measures are provided without the interpolation concept, i.e. only the data points are evaluated directly.
2.3.1 Mean values using continuous interpolation
Before defining the mean values of interest, a fiber—given by \({n_{\text {d}}}\) data points \(\mathbf {d} _k\), \(k=1,\ldots ,{n_{\text {d}}}\)—should be represented by an interpolating function,
As a first approach, piece-wise polynomials of the third order are chosen,
where the sampling points \(\xi _i\) are estimated using the Chord-approach
with \(\xi _1 = 0\). The index i defines the interval, \(i=1,\ldots ,{n_{\text {d}}}-1\), and \(k=1,2,3\) the coordinate direction. In other words, we have \(\hat{x}_k(\xi ) = \hat{x}_{ki}(\xi )\) in interval i, \(\xi _i \le \xi < \xi _{i+1}\). Obviously, we obtain for \(\xi = \xi _i\) the parameters

Straight line and spherical coordinate representation
of each coordinate, \(k=1,2,3\) (starting point implies \(\mathbf {r} (\xi _1) = \mathbf {d} _1\)). Using this approach, the first three derivatives can be determined
In each interval i, four unknowns are given, i.e. we have \(4 \times ({n_{\text {d}}}-1)\) unknowns. Thus, we need the same number of equations. With Eq. (31) and the end point \(\mathbf {r} (\xi _{n_{\text {d}}}) = \mathbf {d} _{n_{\text {d}}}\), there are \({n_{\text {d}}}\) equations. Furthermore, we require that the following conditions are fulfilled at the point \(\xi _{i+1}\)
\(i=1,\ldots ,{n_{\text {d}}}-2\), leading to \(3\times ({n_{\text {d}}}-2)\) equations. Thus, two additional equations are required. Here, we draw on natural splines, i.e. we assume curvature free starting and ending points
The index \(ki+1\) in Eq. (33) defines the kth component (or its derivatives), see Eq. (28), in interval \(i+1\). To avoid a comma separation, which is chosen for derivatives, a comma-free notation is chosen. This holds for \(k{n_{\text {d}}}-1\) in Eq. (34) as well, i.e. the evaluation of the kth function defined in interval \({n_{\text {d}}}-1\). The numerical implementation to solve the linear system of equations is provided in [5], see [4] as well. In other words, the given data points are exactly fulfilled. The curves are continuous of second order. In conclusion, the parameters \(a_{ki}\), \(b_{ki}\), \(c_{ki}\), \(\hat{d}_{ki}\), \(i=1,{n_{\text {d}}}-1\), \(k=1,2,3\), are assumed to be known in the following. This implies that in each interval the position vector and its derivatives
are known in each interval i, \(\xi _i \le \xi < \xi _{i+1}\), \(i=1,\ldots ,{n_{\text {d}}}-1\).
In the following, we define the measures determining fibers. First, the length of a fiber has to be computed using definition (3)
The integrals can, for example, be evaluated using Simpson’s rule, see, for instance, [16], with \(\varDelta \xi = (\xi _{i+1}-\xi _i)/n_S\), \(n_S\) is the number of subintervals between two data points. Then, we have to calculated at the integration points \(\xi ^{(l)} = \xi _i + (l-1) \varDelta \xi \),
In the following, all integrals are evaluated using this integration scheme. (Of course, other schemes or adaptive quadrature rules are possible.)
Next, the mean curvature
the mean torsion
and the mean orientation (direction)
are defined, see Eqs. (18) and (24). In this sense, the two angles (27) can be chosen for a mean orientation,
An additional quantity is the deviation of the curved line to a straight line. The straight line is defined by
where
defines the center of the line (fiber), see Fig. 3. The distance of a point of the line \(\mathbf {r} (\xi )\) to the straight line (42) is given by
see, for instance, [10], so that the mean value is defined by
In conclusion, we have several measures defining a curve (length L (36), mean curvature \(\kappa _M\) (38), mean torsion \(\tau _M\) (39), mean orientations \((\vartheta _M,\varphi _M)\) (41), and the mean deviation \(d_M\) (45) from the mean orientation line (42)).

Center point of a line and the straight line approximation of a curve
Particularly, the length might be of interest to estimate—together with a mean diameter—the volume of the fiber, or the orientation vector \(\mathbf {n} = \mathbf {r} _M,_\xi /\Vert \mathbf {r} _M,_\xi \Vert \) in Eq. (40) is drawn on to determine an orientation tensor \(\mathrm {\mathbf {N}} = \mathbf {n} \otimes \mathbf {n} \), see [15]. However, new measures such as mean curvature or mean deviation to a straight line give insight into the flow behavior and the weakness of natural fibers relative to the matrix material.
2.3.2 Mean values using simplified approach
Apart from the more precise definitions using interpolated points in Sect. 2.3.1, an alternative, simplified access drawing on rough approximations of the derivatives by numerical differentiation and the integrals applying a trapezoidal rule can be provided.
Again the chord method (30) is applied using
In a first step, we compute at all data points \(i=1,\ldots ,{n_{\text {d}}}\) the first three derivatives using the approximations in “Appendix A”. The tangent vector reads, according to Eq. (65),
with
The tangent vectors at the first and the last point can be estimated using Eq. (67),
The second derivative reads according to Eq. (70)
with the abbreviations
Here, too, we must estimate the derivatives at the first and last point, see Eq. (71),
Finally, the third derivative of the spatial curve is estimated using Eq. (72)
where the third derivatives at both the first as well as last point have to be estimated, see Eq. (73),
Obviously, numerical differentiation makes higher-order derivatives more and more inaccurate.
Since all derivatives are known at the data points, the measures of Sect. 2.3.1 can be calculated. For this purpose, a simple numerical integration scheme has to be applied. Since the trapezoidal rule
is more accurate—for nearly the same computational work—than the left rectangular integration scheme
use is made of the trapezoidal rule to compute the integrals.
The mean measures using the trapezoidal rule are assembled in Table 1.
3 Example
In the following, we apply the two concepts to real \(\mu \)-CT data of a man-made cellulose fiber reinforced polypropylene specimen. The data are generated using a 3D X-ray microscope Xradia 520 Versa from Zeiss. The fibers were detected with the program Avizo (version 9.4.0 of the company FEI). The considered volume element of the sample has a size of approximately \(208.5\,\upmu \hbox {m}\times 629.6\,\upmu \hbox {m}\times 629.6\,\upmu \hbox {m}\). This produces the fibers shown in Fig. 4. Here, we are not interested in discussing whether it makes sense considering fibers which are cut at the edge surfaces of the cube-like region or not. We are interested in how the applied schemes work with some data.

\(\mu \)-CT data of man-made cellulose fibers (coordinates in \(\upmu \hbox {m}\))
To obtain more insight in the fiber distribution, we draw on the concepts of Sects. 2.3.1 and 2.3.2. Figures 5 and 6 compile the results. The length computation shows very similar results of both methods, the interpolation concept, and the simplified scheme, see Fig. 5a and b.

Distribution of fiber length, mean curvature, and torsion

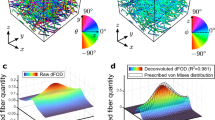
Distribution of mean orientation angles and mean distance to straight line
The mean curvature in Fig. 5c and d, however, shows slightly different results, since the simplified method draws on the second derivative, and derivatives using differential formulas roughen the results. This is the essential drawback in the mean torsion computation shown in Fig. 5e–f, where the third derivative of the curve vector is evaluated. Since there are some fibers with “kinks”, totally unrealistic values are computed using the simplified version to determine the torsion of a fiber. The estimation of the mean fiber orientation, represented by the angles \(\vartheta _M\) and \(\varphi _M\), is appropriate for both schemes, see Fig. 6a–d, which holds for the mean distance of the fibers relative to the center line (42) in Fig. 6e–f.
4 Conclusions
In this paper, the quantitative properties of man-made cellulose fibers are proposed. Since these fibers represent curvilinear functions in the matrix material, some characteristic measures are of particular interest. We propose several measures describing curvilinear lines: length, mean curvature, mean torsion, mean direction, and a mean distance to a straight line. To describe the curvilinear fibers, the discrete data points are interpolated by a first concept. This interpolation is based on splines to obtain a continuous representation. In a second scheme, only the discrete data points are evaluated. There, the required first three derivatives are based on differential derivative formulas leading to a much simpler evaluation process. However, it turns out that the third derivative leads to very inadequate results in some situations so that the measure of mean torsion, i.e. a measure of the deviation of a curve from a plane, is not suitable. All other measures lead—for the distribution of a real \(\mu \)-CT scan data—to similar results. Thus, both methods are a promising tool for evaluating the fiber measures, except for torsion, where only the more sophisticated evaluation procedure is necessary.
References
Advani, S.G., Tucker, C.L.: The use of tensors to describe and predict fiber orientation in short fiber composites. J. Rheol. 31, 751–784 (1987)
Burg, K., Haf, H., Wille, F.: Höhere Mathematik für Ingenieure, Band IV Vektoranalysis und Funktionentheorie, 1st edn. Teubner, Stuttgart (1990)
do Carmo, M.P.: Differential Geometry of Curves and Surfaces. Prentice-Hall Inc., Englewood Cliffs (1976)
Engeln-Müllges, G., Reutter, F.: Numerische Mathematik für Ingenieure, 4th edn. BI-Wissenschaftsverlag, Mannheim (1985)
Engeln-Müllges, G., Reutter, F.: Numerische Mathematik in Standard FORTRAN 77 Programmen, 5th edn. BI-Wissenschaftsverlag, Mannheim (1986)
Faruk, O., Bledzki, A.K., Fink, H.P., Sain, M.: Progress report on natural fiber reinforced composites. Macromol. Mater. Eng. 299(1), 9–26 (2014)
Gandhi, U., De Boodt, S., Kunc, V., Song, Y.Y.: Method to measure orientation of discontinuous fiber embedded in the polymer matrix from computerized tomography scan data. J. Thermoplast. Compos. Mater. 29, 1696–1709 (2016)
Goris, S., Gandhi, U., Song, Y.Y., Osswald, T.A.: Analysis of the process-induced microstructure in injection molding of long glass fiber-reinforced thermoplastics. In: SPE ANTEC, pp. 318–326. SPE ANTEC, Indianapolis (2016)
Graupner, N., Ziegmann, G., Wilde, F., Beckmann, F., Müssig, J.: Procedural influences on compression and injection moulded cellulose fibre-reinforced polylactide (PLA) composites: influence of fibre loading, fibre length, fibre orientation and voids. Compos. Part A 81, 158–171 (2016)
Hartmann, S.: Technische Mechanik, 1st edn. Wiley, Weinheim (2015)
Itskov, M.: Tensor algebra and tensor analysis for engineers. Springer, Berlin (2007)
Malvern, L.E.: Introduction to the Mechanics of a Continuous Medium. Prentice-Hall, Englewood Cliffs (1969)
Müller, V., Brylka, B., Dillenberger, F., Glöckner, R., Kolling, S., Böhlke, T.: Homogenization of elastic properties of short-fiber reinforced composites based on measured microstructure data. J. Compos. Mater. 50, 297–312 (2016)
Osswald, T.A., Menges, G.: Materials Science of Polymers for Engineers, 3rd edn. Carl Hanser, Munich (2012)
Pinter, P., Weidenmann, K.A., Elsner, P.: Chap 3.3. Microstruture characterization. In: Böhlke, T., Henning, F., Hrymak, A., Kärger, L., Weidenmann, K.A., Wood, J.T. (eds.) Continuous–Discontinuous Fiber-reinforced Poylmers. An Integrated Engineering Approach, Progress in Polymer Processing (PPP) Series, pp. 119–134. Hanser Publishers, Munich (2019)
Press, W.H., Teukolsky, S.A., Vetterling, W.T., Flannery, B.P.: Numerical Recipes in FORTRAN, 2nd edn. Cambridge University Press, Cambridge (1992)
Schemmann, M., Görthöfer, J., Seelig, T., Hrymak, A., Böhlke, T.: Mean-field damage modeling of DiCoFRTS. In: Böhlke, T., Henning, F., Hrymak, A., Kärger, L., Weidenmann, K.A., Wood, J.T. (eds.) Continuous–Discontinuous Fiber-reinforced Poylmers. An Integrated Engineering Approach, Progress in Polymer Processing (PPP) Series, pp. 209–223. Hanser Publishers, Munich (2019). chap 4.6
Schulenberg, L., Seelig, T., Andrieux, F., Sun, D.Z.: An anisotropic elasto-plastic material model for injection-molded long fiber-reinforced thermoplastics accounting for local fiber orientation distributions. J. Compos. Mater. 51, 2061–2078 (2017)
Schwarz, H.R., Köckler, N.: Numerische Mathematik, 5th edn. Teubner Verlag, Wiesbaden (2004)
Acknowledgements
We would like to thank Dr. Matthias Grafenhorst for some discussion in programming, and to Prof. Dr.-Ing. A. Ries for her support.
Funding
Open Access funding provided by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Approximation of derivatives by differential formulas
Approximation of derivatives by differential formulas
Concerning the approximation of the vectors \(\mathbf {r} ,_\xi \), \(\mathbf {r} ,_{\xi \xi }\), and \(\mathbf {r} ,_{\xi \xi \xi }\), we draw on concepts of differential formulas and motivate the procedure at a scalar function. First, we look at the approximation of the first derivative. Even here, several possibilities exist, see, for example, [4, 19], most commonly derived for equidistant point spacing. Thus, it has to be explained how the derivatives are approximated.
If we interpolate three points \((\xi _{i-1}, y_{i-1})\), \((\xi _i, y_i)\), and \((\xi _{i+1}, y_{i+1})\) with a quadratic polynomial,
the three conditions \(f(\xi _{i-1}) = y_{i-1}\), \(f(\xi _{i}) = y_{i}\), and \(f(\xi _{i+1}) = y_{i+1}\) yield the coefficients
with \(\varDelta \xi _i = \xi _{i+1}-\xi _i\) and \(\varDelta \xi _{i-1} = \xi _i-\xi _{i-1}\). The approximated derivative at \(\xi _i\) reads
\(i=2,\ldots ,{n_{\text {d}}}-1\). Since the central differential formula cannot provide a derivative at the first and last point, we draw on a forward differential formula at \(\xi _1\) and a backward differential formula at the last point \(\xi _{n_{\text {d}}}\),
The second derivative can be estimated by a Taylor series around \(\xi _i\) to the right and to the left side:
We take the sum of both equations, neglect the higher-order terms, and rearrange the result to obtain the second derivative:
\(i=2,\ldots ,{n_{\text {d}}}-1\). This can be rewritten and approximated using Eq. (66)
\(i=1,\ldots ,{n_{\text {d}}}-1\). If \(\varDelta \xi _{i-1} \approx \varDelta \xi _i\), the last term might be neglected. However, this cannot be guaranteed in the application here. To estimate the second derivative at the first and the last point, again forward and backward differential formulas (linear interpolation) are applied,
The third derivative can be computed by inserting the second derivative into Eq. (65) instead of the function values (quadratic interpolation)
\(i=3,\ldots ,{n_{\text {d}}}-2\); thus, five points are required at least to estimate the third derivative (the values \(f''_{i+1}\) requires \(y_{i+2}\) and \(f''_{i-1}\) requires \(y_{i-2}\)) if the differentials (70) would be used. Since we have estimated the second derivatives at the first and last point, see Eq. (71), formula (72) can be evaluated also in the range \(i=2,\ldots ,{n_{\text {d}}}-1\). The third-order derivatives at the “starting” and “ending” points are estimated by (linear interpolation)
Therefore, at each point \(\xi _i\), \(i=1,\ldots ,{n_{\text {d}}}\), a derivative can be estimated.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hartmann, S., Liese, T. Measures describing curvilinear short fiber distributions. Arch Appl Mech 91, 673–685 (2021). https://doi.org/10.1007/s00419-020-01762-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-020-01762-8