
Abstract
A new orthogonal decomposition for bivariate probability densities embedded in Bayes Hilbert spaces is derived. It allows representing a density into independent and interactive parts, the former being built as the product of revised definitions of marginal densities, and the latter capturing the dependence between the two random variables being studied. The developed framework opens new perspectives for dependence modelling (e.g., through copulas), and allows the analysis of datasets of bivariate densities, in a Functional Data Analysis perspective. A spline representation for bivariate densities is also proposed, providing a computational cornerstone for the developed theory.






Similar content being viewed by others

References
Bigot J, Gouet R, Klein T, López A (2019) Geodesic pca in the wasserstein space by convex pca. Ann. Inst. Henri Poincaré Probab. Stat. 53(1):1–26
de Boor C (1978) A practical guide to splines. Springer, New York
Delicado P (2011) Dimensionality reduction when data are density functions. Comput Stat Data Anal 55:401–420
Dierckx P (1993) Curve and surface fitting with splines. Oxford University Press, New York
Egozcue JJ, Diaz-Barrero JL, Pawlowsky-Glahn V (2008) Compositional analysis of bivariate discrete probabilities. In: Proceedings of CODAWORK 08
Egozcue JJ, Pawlowsky-Glahn V (2016) Changing the reference measure in the simplex and its weighting effects. Aust J Stat 45(4):25–44
Egozcue JJ, Pawlowsky-Glahn V, Templ M, Hron K (2015) Independence in contingency tables using simplicial geometry. Commun Stat Theory Methods 44:3978–3996
Freedman D, Lane D (1983) A nonstochastic interpretation of reported significance levels. J Bus Econ Stat 1(4):292–298
Gába A, Přidalová M (2014) Age-related changes in body composition in a sample of czech women aged 18–89 years: a cross-sectional study. Eur J Nutr 53(1):167–176
Gába A, Přidalová M (2016) Diagnostic performance of body mass index to identify adiposity in women. Eur J Clin Nutr 70:898–903
Guégan D, Iacopini M (2019) Nonparametric forecasting of multivariate probability density functions. ArXiv report arXiv:1803.06823v1
Hron K, Menafoglio A, Templ M, Hrůzová K, Filzmoser P (2016) Simplicial principal component analysis for density functions in bayes spaces. Comput Stat Data Anal 94:330–350
Kokoszka P, Miao H, Petersen A, Shang HL (2019) Forecasting of density functions with an application to cross-sectional and intraday returns. Int J Forecasting 35(4):1304–1317
Kwiatkowski D, Phillips PCB, Schmidt P, Shin Y (1992) Testing the null hypothesis of stationarity against the alternative of a unit root. J Econ 54:159–178
Machalová J (2002) Optimal interpolatory splines using b-spline representation. Acta Univ Palacki Olomuc Fac rer nat Mathematica 41:105–118
Machalová J (2002) Optimal interpolatory and optimal smoothing spline. J Electr Eng 53(12/s):79–82
Machalová J, Hron K, Monti GS (2016) Preprocessing of centred logratio transformed density functions using smoothing splines. J Appl Stat 43(8):1419–1435
Machalová J, Talská R, Hron K, Gába A (2020) Compositional splines for representation of density functions. Comput Stat. https://doi.org/10.1007/s00180-020-01042-7
Martín-Fernández JA, Hron K, Templ M, Filzmoser P, Palarea-Albaladejo J (2015) Bayesian-multiplicative treatment of count zeros in compositional data sets. Stat Model 15(2):134–158
Menafoglio A, Guadagnini A, Secchi P (2014) A kriging approach based on aitchison geometry for the characterization of particle-size curves in heterogeneous aquifers. Stoch Environ Res Risk Assess 28(7):1835–1851
Menafoglio A, Grasso M, Secchi P, Colosimo BM (2016) A class-kriging predictor for functional compositions with application to particle-size curves in heterogeneous aquifers. Math Geosci 48(4):463–485
Menafoglio A, Grasso M, Secchi P, Colosimo BM (2018) Monitoring of probability density functions via simplicial functional pca with application to image data. Technometrics 60(4):497–510
Menafoglio A, Gaetani G, Secchi P (2018) Random domain decompositions for object-oriented kriging over complex domains. Stochastic Environmental Research and Risk Assessment
Nelsen RB (2006) An introduction to copulas. Springer, New York
Nerini D, Ghattas B (2007) Classifying densities using functional regression trees: applications in oceanology. Comput Stat Data Anal 51(10):4984–4993
Panaretos VM, Zemel Y (2019) Statistical aspects of wasserstein distances. Annu. Rev. Stat. Appl. 6(1):405–431
Pawlowsky-Glahn V, Egozcue JJ, Tolosana-Delgado R (2015) Modeling and analysis of compositional data. Wiley, Chichester
Petersen A, Müller HG (2016) unctional data analysis for density functions by transformation to a Hilbert space. Ann Stat 44(1):183–218
Petersen A, Xi L, Divani AA (2019) Wasserstein f-tests and confidence bands for the fréchet regression of density response curves. ArXiv report arXiv:1910.1341
Pini A, Stamm A, Vantini S (2018) Hotelling’s t2 in functional hilbert spaces. J Multiv Anal 167:284–305
Ramsay J, Silverman BW (2005) Functional data analysis. Springer, New York
Schumaker L (2007) Spline functions: basic theory. Cambridge University Press, Cambridge
Seo WK, Beare BK (2019) Cointegrated linear processes in Bayes Hilbert space. Stat Probab Lett 147:90–95
Sklar A (1959) Fonctions de répartition à n dimensions et leurs marges. Publ Inst Stat Univ Paris 8:229–231
Srivastava A, Jermyn I, Joshi S (2007) Riemannian analysis of probability density functions with applications in vision. IEEE Xplore. https://doi.org/10.1109/CVPR.2007.383188
Talská R, Menafoglio A, Machalová J, Hron K, Fišerová E (2018) Compositional regression with functional response. Comput Stat Data Anal 123:66–85
Talská R, Menafoglio A, Hron K, Egozcue JJ, Palarea-Albaladejo J (2020) Weighting the domain of probability densities in functional data analysis. Stat. https://doi.org/10.1002/sta4.283
Tran HD, Pham UH, Ly S, Vo-Duy T (2015) A new measure of monotone dependence by using sobolev norms for copula. In: Huynh V-N, Inuiguchi M, Demoeux T (eds) Integrated uncertainty in knowledge modelling and decision making. Springer, Cham, pp 126–137
van den Boogaart KG, Egozcue JJ, Pawlowsky-Glahn V (2010) Bayes linear spaces. Stat Oper Res Trans 34(2):201–222
van den Boogaart KG, Egozcue JJ, Pawlowsky-Glahn V (2014) Hilbert bayes spaces. Aust NZ J Stat 54(2):171–194
WHO (2020) Adolescent health. https://www.who.int/southeastasia/health-topics/adolescent-health. Accessed 27 Nov 2020
Yule GU (1912) On the methods of measuring association between two attributes. J R Stat Soc 75(6):579–642
Acknowledgements
The authors were supported by Czech Science Foundation (GAČR), GA22-15684L.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Spline representation of univariate clr transformed densities
In this appendix section, the terminology and basics for the spline representation of clr transformed univariate densities as \(L^2\) functions with zero integral are recalled. Let the sequence of knots \(\Delta \lambda \, := \, \left\{ \lambda _i \right\} _{i=0}^{g+1}\), \(\lambda _{0}=a<\lambda _{1}<\ldots<\lambda _{g}<b=\lambda _{g+1}\) be given. The symbol \({{{\mathcal {S}}}}_{k}^{\Delta \lambda }[a,b]\) denotes the vector space of polynomial splines of degree \(k>0\), defined on a finite interval [a, b] with the sequence of knots \(\Delta \lambda \). It is known that \(\dim \left( \mathcal{S}_{k}^{\Delta \lambda }[a,b]\right) =g+k+1\). Then every spline \(s_{k}(x)\in {{{\mathcal {S}}}}_{k}^{\Delta \lambda }[a,b]\) has an unique representation
For generalization of splines to the bivariate density case, the following theorem, which was published in Talská et al. (2018), is of paramount importance.
Theorem 10
For a spline \(s_{k}(x)\in \mathcal{S}_{k}^{\Delta \lambda }[a,b]\), \(s_{k}\left( x\right) =\sum \limits _{i=-k}^{g}b_{i}B_{i}^{k+1}\left( x\right) \), the condition \(\int \limits _{a}^{b}s_{k}(x)\,\text{ d }x=0\) is fulfilled if and only if \(\sum \limits _{i=-k}^{g}\;b_i\left( \lambda _{i+k+1}-\lambda _i\right) \;=\;0.\)
Proof
From the spline theory, it is known that \(\int s_k(x) \, \text{ d }x \, = \, s_{k+1}(x)\). If the notation \(s_{k}(x) = \sum \limits _{i=-k}^{g}b_{i}B_{i}^{k+1}\left( x\right) \) is used, \(s_{k+1}(x) = \sum \limits _{i=-k-1}^{g} c_{i} B_{i}^{k+2}\left( x\right) \), there is known the relationship between their B-spline coefficients in the form
Thus the coefficients \(c_i\) can be expressed as
with \(d_i=\dfrac{k+1}{\lambda _{i+k+1}-\lambda _i}\) and it means that
According to the coincident additional knots, see Machalová et al. (2016) for details, it holds
and it is obvious that
Finally, the definition of \(d_i\) implies that the following sequence of equivalences can be formulated,
\(\square \)
Algorithm
The algorithm to find a spline \(s_{k}(x)\in \mathcal{S}_{k}^{\Delta \lambda }[a,b]\) with zero integral, i.e., the respective vector \({\mathbf {b}}=(b_{-k}, \cdots , b_g)^{\top }\), can be summarized as follows:
1. choose \(g+k\) arbitrary B-spline coefficients \(b_i\in {\mathbb {R}}\), \(i=-k\ldots ,j-1,j+1,\ldots ,g\),
2. compute
Appendix B: Proofs
Proof of Theorem 1
The clr transformation of the independence density \(f_{\mathrm {ind}}(x,y)\) can be written as
This is invariant under rescaling of the product \(f_{X,{g}}(x)f_{Y,{g}}(y)\). By choosing the following representations of \(f_{X,{g}}(x)\) and \(f_{Y,{g}}(y)\),
the second term in (B2) equals zero. Thus (B2) can be rewritten as
For the sake of simplicity in notation, arguments are hereafter omitted. Consider
then
For the first scalar product one has
similarly also \(\langle {\mathrm {clr}(f)},{\mathrm {clr}(f_{Y,g})}\rangle _{L_0^2({\mathsf {P}})} = \Vert {\mathrm {clr}(f_{Y,g})}\Vert _{L_0^2({\mathsf {P}})}^2\). Finally,
which completes the proof. \(\square \)
Proof of Theorem 2
In case of independence, one may decompose a bivariate density as the product of its arithmetic marginals as \(f(x,y)=f_{X,a}(x)f_{Y,a}(y)\). In Bayes spaces, this is reformulated as in (11). Call \({\mathrm {clr}(f_{X,g})}(x)\), \({\mathrm {clr}(f_{Y,g})}(y)\) the clr-representation of the marginals, i.e., \(f_{X,a}(x)=\exp [{\mathrm {clr}(f_{X,a})}(x)]\) and similarly \(f_{Y,a}(y)=\exp [{\mathrm {clr}(f_{Y,a})}(y)]\). Using (11), one may build the independent component as \({\mathrm {clr}(f_{\mathrm {ind}})}(x,y) = {\mathrm {clr}(f_{X,a})}(x)+{\mathrm {clr}(f_{Y,a})}(y)\), which clearly coincides with f itself. The clr representation of the geometric X-marginal is derived—by definition (5)—as
By considering that \({\mathsf {P}}_Y(\Omega _Y)=1\), the geometric X-marginal is obtained by applying the exponential as \(f_{X,{g}}(x)=\exp [{\mathrm {clr}(f_{X,a})}(x)]\), i.e., it coincides with the arithmetic marginal \(f_{X,a}(x)\). The case of Y-marginals would be proven analogously. \(\square \)
Proof of Theorem 3
The orthogonality of the marginals is easy to be proven in the clr space. Specifically,
from the fact that \({\mathrm {clr}(f_{X,g})}\in L_0^2(\Omega _X)\) and \({\mathrm {clr}(f_{Y,g})}\in L_0^2(\Omega _Y)\). In the next step, the orthogonality between \(f_{\mathrm {int}}\equiv f_{\mathrm {int}}(x,y)\) and the X-marginal is proven. Using the first part of this theorem and the relation \(\langle {\mathrm {clr}(f)},{\mathrm {clr}(f_{X,g})}\rangle _{L_0^2({\mathsf {P}})} = \Vert {\mathrm {clr}(f_{X,g})}\Vert ^2_{L_0^2({\mathsf {P}})}\) from the proof of Theorem 1 it holds
\(\square \)
Proof of Theorem 4
Equation (12) can be equivalently stated in terms of the clr marginals as
In this case, one has
where the last equality holds true if the measure \({\mathsf {P}}_X(\Omega _X)\) is normalized. With analogous argument, the same equality is proven for \(f_{\mathrm {int},Y,{g}}^c\). \(\square \)
Proof of Theorem 5
From (11) and the expression \(g_{\mathrm {ind}}=(g_{X,{g}}\oplus f_{X,{g}}) \oplus (g_{Y,{g}} \oplus f_{Y,{g}})\) it follows that \(g_{\mathrm {ind}}\) is an independence density of g. Therefore
\(\square \)
Proof of Theorem 6
Let the first term in (21) be denoted as
and the second one as
We can express the functional \(J_1\) from (4) in matrix notation as
where \({\mathbf {F}}=(f_{i j})\), \({\mathbb {B}} \, := \, {\mathbf {B}}_{l+1}({\mathbf {y}}) \otimes {\mathbf {B}}_{k+1}({\mathbf {x}})\), \({\mathbf {y}}=(y_1,\cdots ,y_m)\), \({\mathbf {x}}=(x_1,\cdots ,x_n)\). Now we consider the derivative of the spline. Similarly as in case of one- dimensional splines, Machalová et al. (2016); Machalová (2002a), the derivative can be expressed by using (23), (24) as
With respect to the properties of the tensor product, and using the notation \({\mathbb {B}}^{u,v}(x,y) := {\mathbf {B}}_{l+1-v}(y) \otimes {\mathbf {B}}_{k+1-u}(x)\), the derivative given in (6) can be reformulated as \( s_{k l}^{(u,v)}(x,y) = {\mathbb {B}}^{u,v}(x,y) \, {\mathbb {S}} \, cs({\mathbf {B}}). \) Note that the flexibility in the choice of the orders \(u,\, v\) in the derivatives \(s_{k l}^{(u,v)}(x,y)\) can be considered as an element of innovation with respect to the classical tensor smoothing spline approach Dierckx (1993). Then the functional \(J_2\) from (5) can be rewritten as
Furthermore,
This yields, \( J_2 \; = \; (1-\alpha ) \left( cs({\mathbf {B}})\right) ^{\top } {\mathbb {S}}^{\top } {\mathbb {M}} \, {\mathbb {S}} \, cs({\mathbf {B}}).\) By putting together the matrix forms of \(J_1\) and \(J_2\), the functional \(J_{uv}(s_{k l}(x, y))\) from (21) can be expressed as a function of unknown B-spline parameters \(b_{ij}\), specifically
The fulfilment of the zero integral condition (22) is based on relation (26). By using this, the function \(J_{uv}(cs({\mathbf {B}}))\) can be reformulated as
Thus, the necessary and sufficient condition for the minimum of function \(J_{uv}(cs({\mathbf {B}}))\) is \( \dfrac{\partial \, J_{uv}(cs({\mathbf {B}}))}{\partial \, cs({\mathbf {B}})} \, = \, 0. \) By applying this condition to (8) the following equation is obtained,
Then the solution to this system is given by
And finally, the matrix \({\mathbf {B}}^*\) of coefficients for the resulting smoothing spline with zero integral is obtained by
\(\square \)
Proof of Theorem 7
The spline \(s_{kl}(x,y) \in \mathcal{S}_{kl}^{\Delta \lambda ,\Delta \mu }(\Omega )\) can be expressed as
where \(s_{l}^i (y) \, := \, \sum \limits _{j=-l}^{h} b_{ij} \, B_j^{l+1} \left( y\right) \), \(i=-k,\cdots ,g\), are in fact one-dimensional splines of order \(l+1\) for the y-variable with coefficients \(b_{ij}\), \(j=-l,\cdots ,h\). Then
and
By considering the case of one-dimensional splines, specifically the proof of Theorem 10, it holds
i.e.
Altogether
Subsequently, using the last expression, the integral can be expressed as
for
because of coincident additional knots (19), (20) it holds
Finally, according to (13) and (A1), there is
where \(s_{k+1}(x) \, = \, \sum \limits _{i=-k-1}^{g} w_i \, B_i^{k+2}(x)\) and
i.e.
As a direct consequence, the following equivalence can be formulated
and altogether
\(\square \)
Proof of Theorem 8
Let \(s_{kl}(x,y) \in \mathcal{S}_{kl}^{\Delta \lambda ,\Delta \mu }(\Omega )\), with the given representation \(s_{kl}\left( x,y\right) =\sum \limits _{i=-k}^{g} \sum \limits _{j=-l}^{h} b_{ij} \, B_{i}^{k+1} \left( x\right) \, B_j^{l+1} \left( y\right) \), and let \(\iint \limits _{\Omega } s_{kl}(x,y) \, \text{ d }x \, \text{ d }y \, = \, 0\). Then from Theorem 7 it is
By using (13), (14) from the proof of Theorem 7 it is obtained that \(s_k(x)\, = \, \sum \limits _{i=-k}^g v_i \, B_{i}^{k+1}(x)\), where \(v_i \, = \, u_{ih}-u_{i,-l-1}\). According to (12) it holds
Next, by considering (15),
where \(s_{k+1}(x)= \sum \limits _{i=-k-1}^g w_i \, B_i^{k+2}(x)\). However, with respect to (16), (17), (19) and (18) this difference equals to
and consequently also \(\int \limits _{a}^{b} s_{k}(x) \text{ d }x \, = \, 0\). The second statement can be proven analogously. \(\square \)
Proof of Theorem 9
Every bivariate spline \(s_{kl}(x,y) \in \mathcal{S}_{kl}^{\Delta \lambda ,\Delta \mu }(\Omega )\) can be expressed as
where \(c_i \, = \, \sum \limits _{j=-l}^h b_{ij} B_{j}^{l+1}(y)\). For a given univariate spline \(s_k(x)=\sum \limits _{i=-k}^g v_{i} B_{i}^{k+1}(x)\) we can define coefficients
Then \(s_k(x)\) can be expressed as a bivariate spline which is constant in variable y and which uses B-spline bases functions \(B_{j}^{l+1}(y)\) in the form
since with respect to the properties of B-splines, de Boor (1978), Dierckx (1993), Schumaker (2007), we have
The rest of the proof is obvious with respect to the addition or subtraction of two splines.\(\square \)
Appendix C: Algorithm
Theorem 7 enables to formulate an algorithm for finding a bivariate tensor spline \(s_{kl}(x,y) \in {{{\mathcal {S}}}}_{kl}^{\Delta \lambda ,\Delta \mu }(\Omega )\) with zero integral over \(\Omega \). This task is equivalent to finding the matrix \({\mathbf {B}} = \left( b_{ij}\right) \), \(i=-k,\cdots ,g\), \(j=-l,\cdots ,h\) of the B-spline coefficients:
1. choose \((g+k+1)(h+l+1)-1\) arbitrary B-spline coefficients \(b_{ij}\in {\mathbb {R}}\), for \(i=-k\ldots ,\beta -1,\beta +1,\ldots ,g\) and \(j=-l\ldots ,\gamma -1,\gamma +1,\ldots ,h\),
2. compute
Appendix D: Complete set of anthropometric data

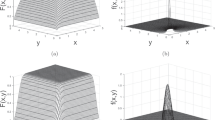
Anthropometric data: smoothed clr transformed densities for all age intervals together with data points resulting from he discrete clr transformation at mid-points of histogram classes. The choice of the scale of the reference measure (uniform measure) does not play any role here

Anthropometric data: smoothed original bivariate densities for all age intervals

Anthropometric data: smoothed independent densities for all age intervals

Anthropometric data: smoothed interation densities for all age intervals
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Hron, K., Machalová, J. & Menafoglio, A. Bivariate densities in Bayes spaces: orthogonal decomposition and spline representation. Stat Papers 64, 1629–1667 (2023). https://doi.org/10.1007/s00362-022-01359-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00362-022-01359-z